elmo伺服驱动器选型手册(中文)
伊莱斯伺服ESDA说明书
安全注意事项ESDA系列通用型伺服驱动器,采用DSP+FPGA体系结构,加快了数据的采集和处理速度,集成度高、可靠性好。
丰富的数字量与模拟量接口,能与多种上位控制装置配套。
优化的PID控制算法,实现转矩、速度、位置精确的全数字控制,精度高、响应快,可使用于多种工业应用场合。
在产品存放、安装、配线、运行、检查和维修前,用户必须熟悉并遵守以下重要事项,以确保安全地使用本产品。
1、产品检查交流伺服驱动器必须与性能匹配的伺服电机配套使用。
2、安装禁止将产品暴露在有水气,腐蚀性、可燃性气体的场合使用,否则会导致触电或火灾。
3、配线电源,否则会造成设备损坏、触电或火灾。
4、操作注意通电前应确认伺服驱动器和伺服电机已安装稳妥,固定牢固,电源电压及接线正确。
运行时,禁止触摸任何旋转中的电机零件,否则可能会造成人员受伤。
5、故障处理除指定的专业人员外,请勿进行连接、安装、操作、拆卸与维修工作,有触电和损坏设目 录第一章 产品说明 (1)1.1铭牌型号说明 (1)1.2驱动器各部分名称 (2)1.3伺服驱动器技术规范 (3)第二章 安装 (4)第三章 配线 (7)3.1外围设备的连接 (7)3.2电源接线实例 (8)3.3伺服驱动器接线 (9)3.3.1 伺服驱动器标准接线图 (9)3.3.2 绝对值编码器接线 (10)3.3.3旋转变压器接线 (10)第四章 接口 (11)4.1主回路端子定义 (11)4.2CN1编码器反馈端子定义 (11)4.3CN2控制端子定义 (12)4.4CN3通信接口端子定义 (13)4.5数字输入输出接口原理 (14)4.5.1 数字输入接口原理 (14)4.5.2 数字输出接口原理 (14)4.6位置脉冲指令输入接口原理 (15)4.7模拟量输入输出接口原理 (18)4.7.1 模拟指令输入接口原理 (18)4.7.2 模拟量输出接口原理 (19)4.8编码器信号输入输出接口原理 (19)4.8.1 编码器信号输出CN2接口原理 (19)4.8.2 编码器信号输入CN1接口原理 (20)第五章 面板操作 (21)5.1面板操作概述 (21)5.2菜单结构 (21)5.2.1状态参数查看操作 (22)5.2.2参数编辑操作 (23)5.2.3特殊功能参数 (24)第六章 通信功能 (25)6.1MODBUS通信概要 (25)6.2MODBUS通信协议 (25)第七章 参数与功能 (31)7.1参数一览表 (31)7.2参数设置详解 (39)7.3数字输入DI功能定义 (54)7.4数字输出DO功能定义 (56)第八章 报警与处理 (58)第九章 运行与调试 (61)9.1驱动器通电 (61)9.2空载运行调试 (61)9.3控制功能调试 (62)9.3.1 位置控制 (62)9.3.2 速度控制 (64)9.3.3 转矩控制 (65)第十章 伺服电机说明 (67)10.1铭牌型号说明 (67)10.2电机各部分名称 (68)10.3伺服电机的安装 (68)10.4伺服电机端子定义及连线 (72)附录A (74)⏹电机适配表 (74)⏹电缆型号 (75)⏹电机信号线(编码器线)电缆型号说明 (76)⏹电机动力线电缆型号说明 (76)第一章 产品说明 1.1铭牌型号说明1、铭牌说明图1.1 伺服驱动器铭牌说明2、型号说明图1.2 伺服驱动器型号说明1.2驱动器各部分名称:不可与主回路电源连接,连接错误时易造成驱动器损坏。
伺服驱动器用户手册
2.2.2、通风间隔
2.2.3、安装方法 1)、安装方向:伺服驱动器的正常安装方向是垂直直立方向。 2)、安装固定:上紧伺服驱动器上的四颗 M5 固定螺钉。 3)、通风散热:采用自然冷却方式,在电气控制柜内必须安装散热风机。
z 拆装带轮时,不可敲击电机或电机轴,防止损坏编码器。应采用螺旋式压 拔工具拆装
z 驱动器端子 U、V、W 必须与电机 U、V、W 一一对应 z 用户在使用本产品时务必在设计与装配时考虑安全防护措施,以防止
因错误的操作引起意外事故 z 驱动器和电机必须良好接地 z 在拆卸本驱动器前,必须断电 5 分钟以上
3.1、标准接线
本交流伺服驱动器的接线与使用的电机和控制方式等有关。
10
3.1.1、与武汉华大、常州常华、常州新月 4 对极电机控制接线图 3-1,对南 京苏强 110SQMA4IE 系列 4 对极电机只需将 UVW 接电机的 423 脚 对应参数 P34=2360、P35=4
20A
30A
50A
75A
100A 150A
≤1.2KW
25A ≤3.7KW
≤2.3KW ≤3.7KW ≤5.5KW ≤7.5KW
AC380V -15%~+10%
50A
75A
≤7.5KW ≤11KW
≤11KW
工作:45℃
存贮:-40℃~55℃
40%~80%无结露 86-106kpa ①位置控制 ②JOG 控制 ③速度控制 ④转矩控制 ⑤位置和速度控制 ⑥内部脉冲控制 ⑦电动刀架控制 ⑧位置和转矩控制 ①脉冲+方向 ②CW+CCW 脉冲 ③两相 AB 正交脉冲 0.01% ≤200Hz ≥500kHz 1:5000 内置 1/30000~30000/1 ≥300% 2500p/r 电机转速、电机电流、电机转矩、电机位置、位置偏差、指 令脉冲数、脉冲频率、直线速度、输入输出诊断 超速、过流、过压、欠压、过载、超差、编码器故障、温度 过高、内部芯片故障、模块故障
Elmo驱动器产品介绍(27,Apr,2008)
伺服产品推广及介绍
伺服产品推广及介绍
空客公司水刀切割机
使用3个MAESTRO控制400个轴加工 解决方案与优点: a.简单高效的多轴控制技术 b.网络以及智能化的开放系统 c.极低的出错率 d.简单的配线,低廉的维护成本
伺服产品推广及介绍
HAR 0.2~1.1KW
EAGLE 2.7~9.6KW
BAS 0.32~1.9KW
MAESTRO
MAS-100802C
伺服产品推广及介绍
概述 Ⅰ 驱动器产品介绍
1.全系列产品介绍 2.实现任意已知复杂曲线 3.可以兼容多种反馈方式 4.简单的操作控制界面 5.强大的双闭环网络 6.独有的ECAM电子凸轮功能 7.选型的注意事项
伺服产品推广及介绍
医疗以及对电磁辐射敏感领域
1.全系列产品达到医疗级别EMI&RFI 2.最高的功率密度与效率
伺服产品推广及介绍
机器人等要求苛刻领域
1.简单而高效的多轴控制技术 2.最高功率密度,效率 3.低EMI/RFI(电磁干扰/电磁辐射)
伺服产品推广及介绍
Ⅱ Maestro多轴管理器
1.有2个CANopen接口,支持160根轴同动 2.支持CANopen(DS301, DS305, DS401, DS402 );
伺服产品推广及介绍
凸轮的工作原理 独有的ECAM电
将旋转运动转化为直线运动 机械凸轮缺点:
子凸轮功能
a.不可避免的机械磨损
b.更换工艺要同时更换凸轮,随之进行的精度调试复杂而且要求专业人员陪同
ω
Φ
h
伺服产品推广及介绍
独有的ECAM电
elmo驱动原理

elmo驱动原理Elmo驱动原理1. 引言Elmo是一种常见的驱动器,用于控制电机或执行器的运动。
它采用先进的技术,使得电机的控制更加精确、高效。
本文将从浅入深地介绍Elmo驱动原理。
2. 电机控制基础知识在深入Elmo驱动原理之前,有必要了解一些电机控制的基础知识。
电机控制涉及三个主要方面:电流控制、速度控制和位置控制。
电流控制是通过对电机加入不同的电流来控制电机的转矩;速度控制是通过改变电机的转速;位置控制是使电机运动到特定的位置。
3. Elmo驱动原理概述Elmo驱动器是一种先进的驱动器,采用了独特的控制算法和硬件设计,以实现更高精度的电机控制。
它主要包括以下几个方面:电机模型Elmo驱动器采用一种准确的电机模型来估计电机的动态响应特性。
这种电机模型可以通过观察电机的反馈信号和输入信号之间的关系来建立。
通过准确估计电机模型,Elmo驱动器可以更好地控制电机的转矩、速度和位置。
闭环控制Elmo驱动器采用闭环控制系统,通过不断监测电机的反馈信号和期望输出信号之间的误差,来调整电机的控制信号。
这种闭环控制可以根据需要进行电流、速度或位置控制。
高速数据采集Elmo驱动器具备高速数据采集功能,可以以非常高的频率采集电机的反馈信号。
这使Elmo驱动器能够对电机的动态响应进行更准确的估计,并能够更快速地校正控制信号。
智能算法Elmo驱动器内置智能算法,可以根据实际应用场景和电机特性进行自适应控制。
它可以根据需要调整控制参数,以实现更高的控制精度和响应速度。
4. Elmo驱动应用Elmo驱动器广泛应用于各种需要精确电机控制的领域,例如机器人、自动化生产线、医疗设备等。
它的高精度控制能力和智能算法使其成为许多关键应用的首选。
5. 结论Elmo驱动器是一种先进的电机驱动器,具备高精度控制和智能算法。
它的独特设计和先进技术,使其在电机控制领域有着广泛的应用。
通过了解Elmo驱动原理,我们可以更好地理解其工作原理,并在实际应用中发挥其优势。
ELMO简明使用手册
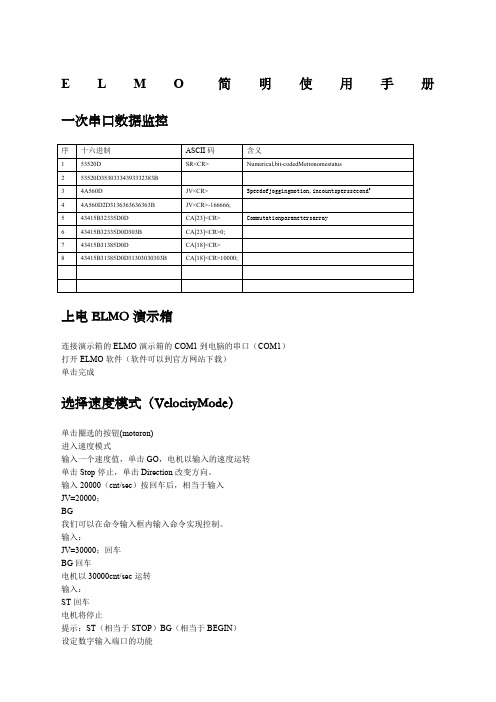
E L M O简明使用手册一次串口数据监控上电ELMO演示箱连接演示箱的ELMO演示箱的COM1到电脑的串口(COM1)打开ELMO软件(软件可以到官方网站下载)单击完成选择速度模式(VelocityMode)单击圈选的按钮(motoron)进入速度模式输入一个速度值,单击GO,电机以输入的速度运转单击Stop停止,单击Direction改变方向。
输入20000(cnt/sec)按回车后,相当于输入JV=20000;BG我们可以在命令输入框内输入命令实现控制。
输入:JV=30000;回车BG回车电机以30000cnt/sec运转输入:ST回车电机将停止提示:ST(相当于STOP)BG(相当于BEGIN)我们可以设定INPUT1为高电平,硬停止通过命令输入JV=30000;BG电机开始旋转,然后将INPUT1拨动到高电平,电机停止,当INPUT1拨回高电平后,电机恢复运转,因为硬停止,并不更改软件的运动状态。
但是,当我们使用“SoftStop”时,当我们置INPUT1为高电平后,软件也停止了,即使,再让INPUT1为高电平后,电机也不能恢复运转。
其他功能的配置如下:更多指令MO=1MO=0以上的含义是:Motoron/offUM Unitmode:stepper,torquecontrol,speedcontrolpositioncontrolordualloop CurrentMode电流模式下,输入命令UM返回1VelocityMode速度模式下,输入命令UM返回2StepperMode步进模式下,输入命令UM返回3DualLoopMode,输入命令UM返回4PositionMode,输入命令UM返回5Unitmode(UM):DefinesthefunctionoftheMetronome.Theunitmodesare: ∙UM=1Torquecontrol∙UM=2Speedcontrol∙UM=3Micro-stepping∙UM=4Dual-feedbackpositioncontrol∙UM=5Single-feedbackpositioncontrolRM Referencemode:external(analog)referencingenabled/disabled所有命令:Command DescriptionPP[N]DefinetheparametersoftheCANorRS-232communicationCommand DescriptionAG[N]AnaloggainsarrayAS[N]AnaloginputoffsetsarrayBP[N]BrakeparameterCA[N]CommutationparametersarrayCL[N]CurrentcontinuouslimitationsarrayEF[N]EncoderfilterfrequencyEM[N]ECAMparametersFF[N]FeedforwardFR[N]FollowerratioHM[N]HomingandcapturemodeHY[N]AuxiliaryhomeandcapturemodeMC Definemaximumpeakcurrentofservodrive,inamperesMP[N]Motion(PT/PVT)parametersPL[N]PeakdurationandlimitPM ProfilermodePT PositiontimecommandPV PositionvelocitytimecommandPW[N]PWMsignalparametersQP PositionQT TimeQV VelocityRM Referencemode:external(analog)referencingenabled/disabledTR TargetradiusUM Unitmode:stepper,torquecontrol,speedcontrolpositioncontrolordualloop VH[N]HighreferencelimitVL[N]LowreferencelimitXM[N]XModuloYM[N]YModuloCommand DescriptionGS[N]GainschedulingKG[N]GainscheduledcontrollerparametersKI[N]PIDintegraltermsarrayKP[N]PIDproportionaltermsarrayKV[N]AdvancedfilterforspeedloopXA[N]Extraparameters?(more)XP[N]ExtraparametersCommand DescriptionBH GetasamplesignalashexadecimalRC Variablestorecord(twovariablesateachrecordingsequence)RG Recordinggap,insamples.Gapbetweenconsecutivedatarecordings.RL RecordlengthRP[N]RecorderparametersRR Recordingon/offRV[N]RecordedvariablesYM[N]AuxiliarysensormodulocountCommand DescriptionAB[N]AbsoluteencodersettingparametersID ReadactivecurrentIQ ReadreactivecurrentPE PositionerrorPX Mainencoderposition,incountsPY AuxiliarypositionVE Velocityerror,incountspersecond2VX Mainencodervelocity,incountspersecond2VY VelocityofauxiliaryfeedbackYA[N]AuxiliarypositionsensorparametersCommand DescriptionCD CPUdump:CPUanddatabaseexceptionsummaryDF DownloadfirmwareDS DownloadfirmwareEO EchomodeHX SelecthexadecimalordecimalmodeLD LoadparametersformflashmemoryRS ResetMetronometoapre-definedstateandparametervalue SV SaveparameterstoflashmemoryTM SystemtimeTP[N]FloatingwizardparametersTS SamplingtimeTW[N]WizardcommandUF[N]UserfloatarrayUI[N]UserintegerWI[N]Metronomedata,mainlyforusebyComposerWS[N]Metronomedata,mainlyforusebyComposerZP[N]IntegerwizardparametersZX[N]Userprogramandauto-tuningtemporarystorage Command DescriptionAN[N]ReadanaloginputsIB[N]Bit-wisedigitalinputIF[N]DigitalinputfilterIP ReadalldigitalinputsOB[N]Bit-wisedigitaloutputOC[N]OutputCompareOL[N]OutputLogicOP SetalldigitaloutputsCommand DescriptionAC Acceleration,incountspersecond2BG BeginmotionBT BeginmotionatdefinedtimeDC Deceleration,incountspersecond2IL[N]Inputlogic,defininghowdedicatedinputsbehaveJV Speedofjoggingmotion,incountsperssecond2MO Motoron/offPA Absolutepositionreferenceforpoint-to-pointmotionPR Relativepositionreferenceforpoint-to-pointmotionSD StopdecelerationSF SmoothfactorformotioncommandSP Speedforpoint-to-pointmotionST StopmotionusingdecelerationvalueTC TorquecommandCommand DescriptionER[N]MaximumtrackingerrorsHL[N]Over-speedlimitandpositionrangelimitLL[N]LowactualfeedbacklimitPL[N]Peakcurrent,inamperes;andpeakduration,insecondsCommand DescriptionBV MaximummotorDCvoltageDD CANcontrollerstatusDV[N]ReferencedesiredvalueEC Errorcode:getcodeforlastinterpretererrorLC Currentlimitation:reportstatusofcurrentlimitationalgorithmMF Motorfault:codeforlastmotor-disablecauseMS MotionstatusreportingPK PeakmemorySN SerialnumberSR Numerical,bit-codedMetronomestatusTI[N]TemperatureindicationsarrayVR Software(firmware)versionCommand DescriptionCC CompileprogramCP ClearapplicationprogramDL ReceiveaprogramdownloadedfromhostcomputertoMetronome.CanbeusedonlyinComposersoftware.HP HaltprogramexecutionKL Killmotionandstopprogram(likeHP)LP[N]ListparametersLS ListprogramMI MaskinterruptPS ProgramstatusXC Continueprogramexecutionfromcurrentpointer,optionallyuntilagivenbreakpointXQ Executeprogram,optionallystartingatagivenlabelanduntilagivenbreakpoint ELMO编程基础增加模拟量输入:##STARTmo=0um=2il[1]=7il[2]=7il[3]=7il[4]=7il[5]=7mo=1while(1)if(ib[1]==1)jv=20000elseif(ib[2]==1)elseif(ib[3]==1)jv=50000elseif(ib[4]==1)jv=-50000elseif(ib[0]==1)jv=an[1]*60000endbgend下载程序流程:首先,让电机进入motoroff状态编译或者快捷键F7没有错误,编译成功时,单击,下图红色圆圈,上载程序到ELMO驱动器。
四川埃姆克伺服主轴选型手册v1.0

额定功率 (kW)
2.2 3.7 5.5 3.7 5.5 7.5 7.5 11 15
额定转矩 (Nm)
7 11.7 17.5 11.7 17.5 24 24 35 48
电机型号
DH09-1-14-2.2/3.7-1500 DH09-2-24-3.7/5.5-1500 DH10-1-24-3.7/5.5-1500 DH10-2-35-5.5/7.5-1500 DH10-3-48-7.5/11-1500 DH13-1-71-11/15-1500 DH13-2-95-15/18.5-1500 DH13-3-117-18.5/22-1500 DH13-4-140-22/30-1500 DH16-1-191-30/37-1500
265
15
110
5
DH13-4-140-22/30-1500
265
230
265
15
110
5
DH16-1-191-30/37-1500
320
300
350
19
140
5
D
Q
L
H
28
8
420
240
28
8
470
240
38
10
470
275
38
10
510
275
38
10
560
275
48
14
620
355
48
14
665
额定功率 (kW)
2.2 3.7 3.7 5.5 7.5 11 15 18 22 30
额定转矩 (Nm)
14 24 24 35 48 71 95 117 140 191
Summa ED3L 系列脉冲型交流伺服驱动器产品手册说明书
2022 Summa ED3L系列脉冲型交流伺服驱动器产品手册V1. 04驱动器型号:ED3L-□□□MAESTUN AUTOMATION CO.,LTD.前言概述本手册对Summa ED3L系列脉冲型交流伺服驱动器(以下简称“ED3L”)的选型、设计、试运行、调整、运行、维护所需的信息进行了说明。
请认真阅读本手册并妥善保管,以便需要时可以阅读和参考。
术语与缩写本手册可能使用的术语或缩写如下所述。
下表列出了本手册中用于EtherCAT和CANopen的缩写及其含义。
下表列出了本手册中使用的数据类型和范围。
符号约定在本文中可能出现如下安全标志,它们所代表的含义如下。
在本手册的正文中,反信号名(L电平时有效的信号)通过在信号名前加(/)来表示。
例如:S-ON= /S-ON P-CON= /P-CON关于参数的书写,调整型参数书写为Pn XXX(XXX是唯一的编号),而功能型参数包括了最多4个功能,书写为Pn XXX.X。
例如:●Pn112(速度前馈),是一个不含子参数(功能)的调整型参数。
●Pn000(基本功能设定0),是由四个不同的子功能组成的功能型参数。
−Pn000.0(Servo ON),表示为电机通电的方法。
−Pn000.1(禁止正转输入),表示外部P-OT信号的生效方式。
−Pn000.2(禁止反转输入),表示外部N-OT信号的生效方式。
−Pn000.3(保留),未定义其功能,请勿变更该参数的设定。
安全注意事项整体注意事项危险⏹请勿在驱动器通电的状态下,拆下外罩、电缆、连接器及选购设备。
⏹请勿在驱动器的输出端子U 、V 、W 上连接三相电源。
⏹ 请在断开电源至少5分钟,确认电源指示灯(CHARGE)已熄灭,再进行接线及检查作业。
即使断开了电源,驱动器内部仍然可能残留高电压。
因此,在电源指示灯(CHARGE)亮灯期间,请勿触摸电源端子。
警告 ⏹请使用与产品相符的电源规格(相数、电压、频率、AC/DC )。
信捷伺服手册

b
目录
目录
前言 ......................................................................................................................................................... I 本手册的内容构成........................................................................................................................... I 本手册的适用读者........................................................................................................................... I 手册的获取途径............................................................................................................................... I
2.请勿直接触摸产品的导电部位。 有可能引起误动作、故障。
z 产品的接线
危险
1.在对驱动器进行接线操作前,请务必断开所有外部电源。 有触电的危险。
2.请将 AC 电源正确连接到驱动器的专用电源端子上。 接错电源,可能引起火灾。
注意
1.请勿将驱动器的输出端子 U、V、W 与三相电源连接。 a