凸边界生成方法
每天懂一点三维CAD设计:建模中如何实现凸缘?

每天懂一点三维CAD设计:建模中如何实现凸缘上一篇博主和大家分享到三维CAD设计建模中如何加强筋,今天博主继续以中望3D 为例,与大家一起学习建模中如何实现凸缘。
2分钟就能看完!相信大家经过这么久的学习和积累,掌握起来应该是毫不费力,运用起来也是得心应手啦!第三届中望3D全球创新设计大赛10.8就要开始了,大家可以摩拳擦掌了!
----------------------------------------------------------------------------------------------------------------------单击工具栏【造型】→【凸缘】功能图标,系统弹出“凸缘”对话框,如下图所示,该命令主要用于创建腔体零件配合部位的卡口形状。
●边:定义需要创建凸缘特征的实体边。
选择完边后,还需要选择一个侧面方向,以确定偏距1的方向。
●偏距1:指定凸缘的深度值。
●偏距2:指定偏移的宽度值。
【凸缘操作步骤】:
单击【造型】→【凸缘】功能图标。
选择凸缘的轮廓。
选择偏距1的侧面方向。
设定凸缘的深度和宽度方向上的偏移量。
单击“确定”按钮,完成凸缘创建。
效果如下图所示。
本文出自中望3D官方博客,转载时请注明出处及相应链接。
凸包面积和周长的计算

凸包面积和周长的计算凸包是在平面上给定的一组点中构成的最小凸多边形。
凸包的面积和周长是计算凸包重要的指标,可以用来分析数据分布的紧密程度和形状特征。
本文将介绍凸包的定义和生成算法,并详细说明如何计算凸包的面积和周长。
一、凸包的定义凸包是指在平面上给定的一组点中,由这些点构成的最小凸多边形。
凸多边形的特点是:任意两点之间的线段都在多边形内部。
凸包是凸多边形中的最小面积的凸多边形,即是在所有凸多边形中,面积最小的凸多边形。
二、凸包的生成算法1. Jarvis算法(也叫作包裹算法或者旋转卡壳算法):该算法基于以下思想:从一组点中找到一个起始点,将其作为凸包的一个顶点。
然后,从这个点开始,寻找下一个能保证凸包深度最大的点,并将其加入凸包。
不断重复这个过程,直到回到起始点为止。
该算法的时间复杂度为O(nh),其中n是点的个数,h是凸包的顶点数。
2.快速凸包算法:该算法基于Graham扫描算法改进而来。
首先选择一个y坐标最小的点,将其他点按照与这个点的连线的极角进行排序。
然后依次处理排序后的点,对每个点进行判断,如果点在逆时针方向上,则加入凸包,否则舍弃。
最后得到凸包。
该算法的时间复杂度为O(nlogn),是一种高效的凸包生成算法。
三、凸包面积的计算凸包的面积可以用以下公式进行计算:S = (x1y2 + x2y3 + ... + xn-1yn + xny1 - x2y1 - x3y2 - ... - xnyn-1 - x1yn) / 2其中,(x1, y1), (x2, y2), ..., (xn, yn)是凸包的顶点的坐标。
计算凸包的面积可以通过以上公式进行求解,公式中的坐标是有顺序的,要按照逆时针或者顺时针的方向依次输入。
四、凸包周长的计算凸包的周长可以通过计算凸包顶点之间的距离之和来得到。
对于凸包的n个顶点,可以依次计算相邻顶点之间的距离,并将其累加得到凸包的周长。
保证计算的正确性需要注意以下几点:1.凸包的顶点要按照逆时针或者顺时针的方向依次输入,以保证计算出的面积和周长的结果正确。
海上交管系统多点定位技术研究

() 2
定理 3已知三角形 . , 的顶点坐标【1 ) . ) X , , (,
(3 ,,则三角 形 的面积为 : X, ) Y
一 1
( 若 ( 2 )
,川 < 且 s , .> )0 【, ) 0,如果 成为
的立 即后继 ,那 么 必属 于 P ( , ) KT 。
[ ywod lnvg t n mutp it o io ; o vxh l cne f rvt;v lainfn t n ma・ nds n e Ke r s aiai ; l-on st n c n e ul e t o ai eaut ci ; xmi i ac o i p i ; r g y o u o t D0I 1.9 9 .s.0 03 2 .0 21 . 8 : 03 6 /i n1 0 .4 82 1.80 js 5
8期 第 3 卷 第 l 8
Vo - 8 l3 N O. 8 1
计
算
机
工
程
21 0 2年 9月
S p e b r 201 e tm e 2
Comp t rE i e rng u e ng n e i
・ 工程 应 用技 术 与实现 ・
文章螭号: oo-48 o ) —01—0 1o_32( 1 1 28 3 文献标识码; 228 A
定义 2设 尸为一顺时针排列的简单多边形 ,其顶点
序 列 为 , , …, 记 C P 为 P的凸包 , ( , ) 顶 H( ) L 为 点 , 的 直 接 连 接 , 称 C ( , ) ( , , , UN = +)
一午 ,
利用求平面薄板 的重心公式把积分转换为累加和 : Id ̄ £ Ic x
凸包知识简要概括(构造凸包)
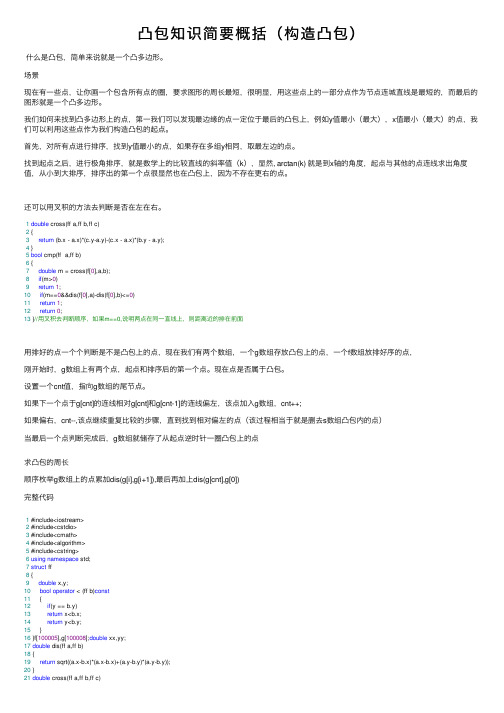
凸包知识简要概括(构造凸包)什么是凸包,简单来说就是⼀个凸多边形。
场景现在有⼀些点,让你画⼀个包含所有点的圈,要求图形的周长最短,很明显,⽤这些点上的⼀部分点作为节点连城直线是最短的,⽽最后的图形就是⼀个凸多边形。
我们如何来找到凸多边形上的点,第⼀我们可以发现最边缘的点⼀定位于最后的凸包上,例如y值最⼩(最⼤),x值最⼩(最⼤)的点,我们可以利⽤这些点作为我们构造凸包的起点。
⾸先,对所有点进⾏排序,找到y值最⼩的点,如果存在多组y相同,取最左边的点。
找到起点之后,进⾏极⾓排序,就是数学上的⽐较直线的斜率值(k),显然, arctan(k) 就是到x轴的⾓度,起点与其他的点连线求出⾓度值,从⼩到⼤排序,排序出的第⼀个点很显然也在凸包上,因为不存在更右的点。
还可以⽤叉积的⽅法去判断是否在左在右。
1double cross(ff a,ff b,ff c)2 {3return (b.x - a.x)*(c.y-a.y)-(c.x - a.x)*(b.y - a.y);4 }5bool cmp(ff a,ff b)6 {7double m = cross(f[0],a,b);8if(m>0)9return1;10if(m==0&&dis(f[0],a)-dis(f[0],b)<=0)11return1;12return0;13 }//⽤叉积去判断顺序,如果m==0,说明两点在同⼀直线上,则距离近的排在前⾯⽤排好的点⼀个个判断是不是凸包上的点,现在我们有两个数组,⼀个g数组存放凸包上的点,⼀个f数组放排好序的点,刚开始时,g数组上有两个点,起点和排序后的第⼀个点。
现在点是否属于凸包。
设置⼀个cnt值,指向g数组的尾节点。
如果下⼀个点于g[cnt]的连线相对g[cnt]和g[cnt-1]的连线偏左,该点加⼊g数组,cnt++;如果偏右,cnt--,该点继续重复⽐较的步骤,直到找到相对偏左的点(该过程相当于就是删去s数组凸包内的点)当最后⼀个点判断完成后,g数组就储存了从起点逆时针⼀圈凸包上的点求凸包的周长顺序枚举g数组上的点累加dis(g[i],g[i+1]),最后再加上dis(g[cnt],g[0])完整代码1 #include<iostream>2 #include<cstdio>3 #include<cmath>4 #include<algorithm>5 #include<cstring>6using namespace std;7struct ff8 {9double x,y;10bool operator < (ff b)const11 {12if(y == b.y)13return x<b.x;14return y<b.y;15 }16 }f[100005],g[100008];double xx,yy;17double dis(ff a,ff b)18 {19return sqrt((a.x-b.x)*(a.x-b.x)+(a.y-b.y)*(a.y-b.y));20 }21double cross(ff a,ff b,ff c)22 {23return (b.x - a.x)*(c.y-a.y)-(c.x - a.x)*(b.y - a.y);24 }//求叉积25bool cmp(ff a,ff b)26 {27double m = cross(f[0],a,b);28if(m>0)29return1;30if(m==0&&dis(f[0],a)-dis(f[0],b)<=0)31return1;32return0;33 }34int main()35 {36int n;37 scanf("%d",&n);38for ( int i = 0;i<n;++i) scanf("%lf%lf",&f[i].x,&f[i].y);39 sort(f,f+n);//找到最左最下的点40if(n == 1)41 printf("%.2f\n",0.00);42else if(n == 2)43 printf("%.2f\n",dis(f[0],f[1]));44else45 {46 g[0] = f[0];//凸包数组放⼊起点47 xx = g[0].x;48 yy = g[0].y;49 sort(f+1,f+n,cmp);//极⾓排序50 g[1] = f[1];//第⼆个点也在凸包内51int cnt = 1;//指向凸包数组的尾结点52for(int i = 2;i<n;++i)53 {54while(i>=1&&cross(g[cnt-1],g[cnt],f[i])<0)55 cnt--;//如果新加进来的节点相对最后两点连线偏右,减去最后⼀个点,循环判断56 g[++cnt] = f[i];//加⼊新节点57 }58double s = 0;5960for (int i = 1;i<=cnt;++i)61 s+=dis(g[i-1],g[i]);62 s+=dis(g[cnt],f[0]);//计算每条边的长度63 printf("%.2lf",s);64 }65return0;66 }View Code。
凸包计算边界框范文

凸包计算边界框范文凸包计算边界框是一种常用的计算凸多边形的算法,其目的是找到一个能够包围给定点集的最小凸多边形。
在计算机图形学和计算几何学中,凸包是一个非常重要的概念,经常用于解决各种问题,如碰撞检测、能量最小化、面积计算等。
而通过计算凸包,我们可以得到一个能够包围点集的边界框,这个边界框可以用来判断点在给定区域内的位置,或者对点集进行聚类等任务。
凸包的计算一般有两种常用的方法:枚举法和增量法。
枚举法的思想是通过遍历点集中的每一个点来确定凸包的边界点。
具体来说,我们可以选择一个点作为起点,然后依次检查其他点,计算出起点和其他点之间与x轴的夹角,并根据夹角排序。
排序完成后,我们选择最小的夹角对应的点,再选择下一个最小夹角对应的点,以此类推,直到再次回到起点。
这样得到的点序列就是凸包的边界点,我们可以根据这些点来构造一个多边形,从而得到凸包。
增量法是另一种常用的凸包计算方法,其思想是通过一系列递增的步骤来构造凸包。
具体来说,我们首先选择点集中的最左边和最右边两个点作为凸包的起点,然后依次考虑其他的点。
对于给定的点,我们判断它是否在当前的凸包中,如果在则忽略,如果不在,则可以通过一定的方法来更新凸包。
比如,我们可以找到当前凸包上离该点最近的点,然后将这个点和该点插入到凸包中。
通过不断地插入点,我们最终可以得到一个包围所有点的凸多边形。
通过计算凸包,我们可以得到点集的最小凸多边形。
而通过这个凸多边形,我们可以进一步计算出点集的边界框。
边界框是一个矩形区域,可以用一个最小的矩形来包围给定的点集。
具体来说,我们可以通过计算凸包得到的凸多边形的顶点,找到其最左边的点、最右边的点、最上边的点和最下边的点。
然后,我们可以根据这些点的坐标来构造一个矩形,这个矩形就是点集的边界框。
凸包计算边界框在计算机图形学和计算几何学中有着广泛的应用。
它可以通过简单的算法来计算点集的凸多边形,从而得到点集的边界框。
通过边界框,我们可以判断点是否在给定的区域内,或者对点集进行聚类等任务。
凸包算法及凸包融合

凸包算法及凸包融合凸包算法是计算凸包的一种常用算法,它可以找到一组点集中最外层的凸多边形。
凸包融合是指将两个凸包合并成一个新的凸包,能够通过减少顶点数目来优化计算效率。
凸包算法主要有以下几种常见的实现方法:1.枚举算法:对于点集中的每一对点,判断其他点是否位于这两点所确定的直线的一侧。
如果所有点都在一侧,则这两点是凸包上的边。
时间复杂度为O(n^3)。
2. Graham扫描算法:选取一个点作为基准点,将其他点按照相对于基准点的极角大小进行排序。
然后依次处理每个点,判断其是否属于凸包。
时间复杂度为O(nlogn)。
3. Jarvis步进算法(也称为包裹法):从点集中选取一个临时点p,然后找到与p相邻的点集中极角最小的点q,将q加入凸包中。
然后将q作为新的临时点p,重复以上步骤,直到回到第一个点。
时间复杂度为O(nh),其中h是凸包的边数。
4.快速凸包算法:通过空间分割和递归的方法进行凸包计算,时间复杂度为O(nlogn)。
凸包融合是指将两个凸包合并成一个新的凸包,通常需要满足以下条件:1.相交边的共享:两个凸包如果相交,那么它们的公共边必须都在新的凸包中。
2.外部边的合并:如果两个凸包没有相交,那么合并后的凸包应该包含两个凸包的外部边。
3.顺序性:合并后的凸包应该按照某种规定的顺序进行连接。
凸包融合算法的一种常见方法是基于边的融合。
具体步骤如下:1.找到两个凸包之间的最近边,并将其作为起始边。
2.沿着其中一个凸包的边界向对面的凸包前进,每次选取与当前边最接近的边。
3.如果新选取的边与已经选取的边形成了一个角度大于180度的三角形,那么停止前进,并将新选取的边作为起始边。
4.重复步骤2和步骤3,直到回到起始边。
凸包融合算法可以减少凸包的顶点数量,从而提高计算效率。
例如,对于两个有m和n个顶点的凸包,假设m > n,则融合后的凸包最多有m+n个顶点,而不是m*n个顶点。
融合后的凸包可以保留原始凸包的边界信息,并且减少了计算和存储开销。
凸包算法,计算外接矩形

凸包算法是一种用于确定一组点在二维空间中的最小边界矩形的方法。
通过使用凸包算法,我们可以找到一组点的外接矩形,以便更好地理解和使用这些点。
本文将介绍一种常见的凸包算法,并讨论如何使用它来计算一组点的外接矩形。
凸包算法的基本思想是找到一组点在二维空间中的最小边界矩形。
这个矩形由所有点的最小凸组合形成,这意味着矩形应该包含所有点,并且不会包含任何其他点。
通过遍历这些点,我们可以找到一个包含所有点的最小矩形,即外接矩形。
一种常见的凸包算法是Graham扫描算法,它是一种基于分治思想的算法。
该算法首先将一组点分为两个子集:一个包含奇数数量的点,另一个包含偶数数量的点。
然后,它使用一个优先队列来选择一个具有最大面积的子集中的点,并将其添加到外接矩形的边界中。
重复这个过程直到所有点都被添加到外接矩形中。
以下是使用Graham扫描算法计算一组点的外接矩形的步骤:1. 初始化一个空的外接矩形对象。
2. 将所有点添加到两个子集中:一个包含奇数数量的点(称为奇数点集),另一个包含偶数数量的点(称为偶数点集)。
3. 将奇数点集中的所有点按照从大到小的顺序添加到优先队列中。
4. 重复以下步骤直到队列为空:a. 从队列中取出具有最大面积的奇数点(如果有多个奇数点具有相同的最大面积,则选择第一个)。
b. 将该点添加到外接矩形的右下角。
c. 将该点到偶数点集中添加一个副本(用于Graham扫描的稳定性)。
5. 将偶数点集中的所有点按照从大到小的顺序添加到优先队列中。
6. 重复步骤4和5,直到队列为空。
7. 最后,返回计算得到的外接矩形对象。
在实现凸包算法时,需要处理一些关键问题,如优先队列的实现、奇数点和偶数点的定义以及Graham扫描算法的稳定性等。
为了实现这些算法,可以使用一些常见的编程语言和库,如Python和NumPy库中的相关函数。
总之,凸包算法是一种用于确定一组点在二维空间中的最小边界矩形的方法。
通过使用Graham扫描算法等凸包算法,我们可以找到一组点的外接矩形,以便更好地理解和使用这些点。
三角网格的参数化
面有着广泛的应用 比如, 纹理映射利用表面网格 参数化信息, 把一幅纹理图像映射到三维网格上, 使 得表面网 格看上去更加生动逼真[ 1 3] ; 曲面拟合通 过参数化把离散的 3D 数据点用一个光顺的参数曲 面来拟合[ 4 7] ; 重网格化( Remeshing ) 则利用参数化 把三 角化 曲面 转 化成 具 有细 分 连通 性 的 规则 网 格[ 8 11] , 并 且 在 此 基 础 上 进 一 步 作 多 分 辨 率 分 析[ 12 13] ; 还有很多数字几何处理, 如交互式三维绘 画[ 14] 、三维网格编辑[ 15] 、网格 Morphing 等[ 16 19] 都 需要事先把网格参数化到一个容易交互式处理的参
第 16 卷 第 6 期 2004 年 6 月
计算机辅助设计与图形学学报
JO U RNAL OF COM PU T ER AI DED DESIGN & COM PU T ER GRA PHI CS
V ol 16, No 6 June, 2004
三角网格的参数化
彭群生1, 3)
胡国飞1, 2)
1) ( 浙江大学 CAD & CG 国家重点实验室 杭州 310027)
度[ 20]
∀ D ist area = j
∀S ( T j ) -
S( T i)
S
(
T
* j
)
2
∀S
(
T
* i
)
Ti M
T
* i
M*
∀ ∀ D ist angle = j
i= 1, 2, 3
A 2
i
-
A
* i
2+
e
2
( 1)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸边界生成方法
凸边界生成是计算机图形学中的一项技术,主要用于从一组顶点生成凸多边形。
以下是几种常见的凸边界生成方法:
1. 凸包算法:通过计算一个点集的凸包来生成凸多边形。
凸包是包含点集中所有点的最小凸多边形。
这种方法可以确保生成的凸多边形是最大的,并且仍然包含原始点集。
2. 扫描线算法:该算法从点集中选择一个起点,然后沿着水平线扫描,依次连接水平线下的点,直到无法继续连接新的点。
然后,算法将水平线提高,并重复这个过程。
这种方法适用于具有简单形状的点集,但对于具有复杂形状的点集可能不是最佳选择。
3. 分治算法:该算法将点集分成两个子集,然后递归地对每个子集应用相同的算法。
在每个递归步骤中,算法都会计算两个子集之间的边界,并将这个边界添加到凸多边形的边界中。
这种方法可以在较短时间内生成凸多边形,但可能需要更多的内存和计算资源。
4. 三角形化算法:该算法将点集表示为一系列三角形,然后将这些三角形连接起来以形成凸多边形的边界。
这种方法适用于具有复杂形状的点集,但可能需要更多的计算和内存资源。
以上是几种常见的凸边界生成方法,每种方法都有其优点和缺点,具体使用哪种方法取决于具体的应用场景和需求。