Voronoi图生成算法的实现、对比及演示实验报告
基于Voronoi图的实时刚体破碎模拟
基于Voronoi图的实时刚体破碎模拟1.引言(1)研究背景和意义(2)国内外相关研究现状(3)本文研究内容和贡献2.Voronoi图(1)Voronoi图的定义和性质(2)Voronoi图在刚体破碎模拟中的应用(3)基于Voronoi图的实时刚体破碎模拟的理论基础3.实时刚体破碎模拟的算法(1)基于Voronoi图的刚体破碎模拟算法概述(2)Voronoi图的构建和更新(3)刚体破碎的损伤与破碎的模型(4)碎片的生成和方法4.实现与实验(1)刚体破碎模拟系统架构(2)碎片渲染技术(3)性能优化和实验效果5.总结与展望(1)研究成果总结(2)改进空间和未来研究方向1.引言实时刚体破碎模拟是计算机图形学领域一个重要的研究方向,其应用广泛,包括游戏、影视特效、虚拟现实等领域。
破碎效果是实现真实和逼真物理现象的重要手段之一。
随着计算机硬件的不断提高,实时性成为了刚体破碎模拟的一个重要目标,这使得破碎效果更加真实,并提高了与用户的互动性。
本文研究的是基于Voronoi图的实时刚体破碎模拟,这是一种常用的方法。
Voronoi图是一种图形结构,对于平面中的一组点,它将平面分割为多个区域,每个区域包含离该点最近的所有点,并且每个区域与其所包含的点的距离相等。
Voronoi图广泛应用于计算机图形学和计算机视觉等领域。
其中,基于Voronoi图的实时刚体破碎模拟方法通过构建物体内部点的Voronoi图解决了物体内部的碎片分离和碰撞检测问题。
本章将分为三个部分:研究背景和意义、国内外相关研究现状、本文研究内容和贡献。
1.1 研究背景和意义随着计算机图形学和游戏产业的发展,实时刚体破碎模拟受到越来越广泛的关注。
例如,在一些游戏中,玩家可以将建筑物或其他物体破坏成碎片。
实现这种效果需要破碎模拟,而实时刚体破碎模拟技术能够在游戏运行时实时计算出物体的破碎效果。
此外,实时刚体破碎模拟还被用于影视和虚拟现实中,给人类带来更加自然逼真的视觉和听觉体验。
三维Voronoi图的动态实现与研究
三维Voronoi图的动态实现与研究曹锐创石奇偲黄棱潇摘要在计算几何中,离散点构造Voronoi图是一个非常基础且应用广泛的问题。
N个离散点按照最邻近原则划分区域,每个点与它的最近邻区域相关联。
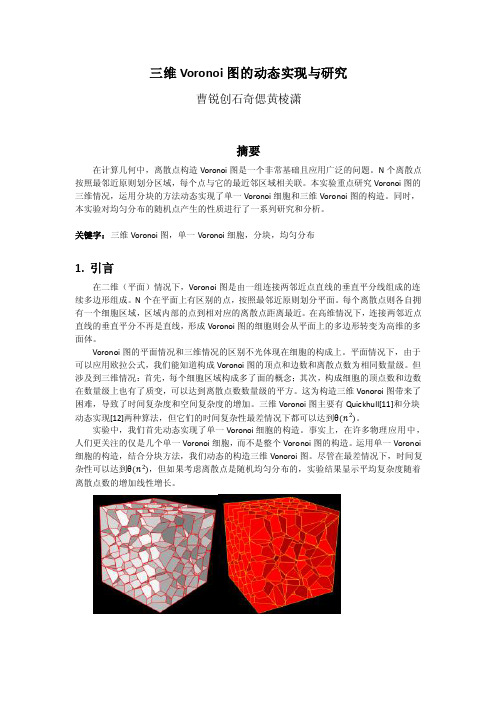
本实验重点研究Voronoi图的三维情况,运用分块的方法动态实现了单一Voronoi细胞和三维Voronoi图的构造。
同时,本实验对均匀分布的随机点产生的性质进行了一系列研究和分析。
关键字:三维Voronoi图,单一Voronoi细胞,分块,均匀分布1.引言在二维(平面)情况下,Voronoi图是由一组连接两邻近点直线的垂直平分线组成的连续多边形组成。
N个在平面上有区别的点,按照最邻近原则划分平面。
每个离散点则各自拥有一个细胞区域,区域内部的点到相对应的离散点距离最近。
在高维情况下,连接两邻近点直线的垂直平分不再是直线,形成Voronoi图的细胞则会从平面上的多边形转变为高维的多面体。
Voronoi图的平面情况和三维情况的区别不光体现在细胞的构成上。
平面情况下,由于可以应用欧拉公式,我们能知道构成Voronoi图的顶点和边数和离散点数为相同数量级。
但涉及到三维情况:首先,每个细胞区域构成多了面的概念;其次,构成细胞的顶点数和边数在数量级上也有了质变,可以达到离散点数数量级的平方。
这为构造三维Vonoroi图带来了困难,导致了时间复杂度和空间复杂度的增加。
三维Voronoi图主要有Quickhull[11]和分块动态实现[12]两种算法,但它们的时间复杂性最差情况下都可以达到θ(n2)。
实验中,我们首先动态实现了单一Voronoi细胞的构造。
事实上,在许多物理应用中,人们更关注的仅是几个单一Voronoi细胞,而不是整个Voronoi图的构造。
运用单一Voronoi 细胞的构造,结合分块方法,我们动态的构造三维Vonoroi图。
尽管在最差情况下,时间复杂性可以达到θ(n2),但如果考虑离散点是随机均匀分布的,实验结果显示平均复杂度随着离散点数的增加线性增长。
关于k_1_k_n_阶Voronoi图生成算法的研究_顾晓青

收稿日期:2003-04-01。
本文研究得到河北省教育厅项目基金资助(编号:2001238)。
顾晓青,硕士生,主研领域:计算几何,计算机图形学。
关于k (1≤k <n )阶Voronoi 图生成算法的研究顾晓青1,2 张有会1 赵 晔1 赵志辉11(河北师范大学数学与信息科学学院 石家庄050016)1(河北工程技术高等专科学院基础部 沧州061001)摘 要 k (1≤k <n )阶Voronoi 图由k 阶最近点Voronoi 图和k 阶最远点Voronoi 图组成,是Voronoi 图的一种重要推广。
k 阶Voronoi 图常用于确定平面点集中k 个点的最邻近或最远问题,具有广泛的应用。
本文首先对k 阶Voronoi 图的基本性质进行了证明,并讨论了k 阶最近点与最远点Voronoi 图的关系,最后,给出了一种生成k 阶Voronoi 图的算法。
该算法思路清昕,数据结构简洁,易于实现,并以图例验证了算法的有效性。
关键词 计算几何 Voronoi 图 k 阶Voronoi 图RESEARCH ON THE C ONSTR UCTION ALGORITHM OFOR DER k (1≤k <n )V ORONOI DIAGRAMGu Xiaoqing1,2 Zhang Yuohui 1 Zhao Ye 1 Zhao Zhihui11(C olle ge of Mathematics and Infor mation Science ,Hebei Normal Unive rs ity ,Shijiazhuang 050016)2(Department of Bas ic C our se s ,Hebei Enginee ring and Technical C ollege ,Cangzhou 061001)A bstract Order k (1≤k <n )voronoi diagram ,which consists of the kth -nearest -point voronoi diagram and kth -farthest -point voronoi diagram ,is an important generalization of the ordiary voronoi diagram .It is often used to solve the problem concerning kth nearest or farthest points of a point set andfinds its applications in various fields .This paper first gives a proof of the property of the kth -nearest -point voronoi diagram .And then ,it studies the relation between the two types of Order k voronoi diagram .In the end ,we develop an algorithm for forming Order k voronoi diagrams .The method with clear -cut thinking and concise data structure is easily implemented and examples are given to illustrate its efficiency .Keywords Computational geometry Voronoi diagram Order k voronoi diagram 1 引 言在计算几何时,Voronoi 图是一个相当重要的几何结构。
voronoi多边形的生成原理

voronoi多边形的生成原理
Voronoi多边形是由一组离散点生成的多边形。
它们的生成基于一个称为Voronoi图的基于点的分割方法。
这个方法的基本思想是将平面分割成一些相互不重叠的区域,每个区域都以一个离散点为中心,并且包含离该点最近的所有其他点。
生成Voronoi图的方法有很多种。
其中一种常用的方法是基于Fortune算法。
这个算法首先将点按照x坐标排序,然后将它们一一插入一个扫描线数据结构中。
在扫描线向右移动的过程中,每当遇到一个点时,就会在扫描线上创建一个新的边。
这个边会将扫描线上的点分成两个部分,并且将它们所属的区域分割开来。
当扫描线遇到两个点之间的空白区域时,它会在这里创建一个新的顶点。
这个顶点将作为边的交点,并且被添加到一个数据结构中。
这个数据结构,也就是Delaunay三角网,是由Voronoi图的双重图
组成的。
最后,Voronoi图可以通过将Delaunay三角网的三角形外接圆
相互连接形成。
这些连接形成了Voronoi多边形的顶点。
总之,Voronoi图是一种非常有用的工具,可以在各种应用中使用,包括地理信息系统、图形学、计算机视觉等。
了解其生成原理,可以帮助我们更好地理解其应用和工作原理。
- 1 -。
voronoi图的原理和应用

Voronoi图的原理和应用1. 什么是Voronoi图Voronoi图,也被称为泰森多边形、Dirichlet图或Voronoi多边形,是一种在计算几何学中被广泛应用的图形。
它是由若干个点在平面上产生的一系列曲线分隔而成的区域。
该图形以每个点为中心,将离得最近的点组成的区域划分开来。
2. Voronoi图的原理•步骤1:给定一组点集P,例如2D平面上的点•步骤2:对于每个点p∈P,根据离该点最近的点q∈P,生成一条从点p到点q的线段•步骤3:根据所有的线段形成的区域,将平面划分成多个区域,每个区域都由一个独立的点p∈P和其离该点最近的点q∈P确定3. Voronoi图的性质•Voronoi图是一种分割几何空间的图形,它将平面划分成若干个不重叠区域•每个Voronoi图的区域都由一个独立的点和最近的点共同确定•Voronoi图中的每条边都是由两个不同点之间的中垂线构成•Voronoi图的边界是由无穷远处的点所确定•Voronoi图满足唯一性,即给定一组点集,对应的Voronoi图是唯一的4. Voronoi图的应用4.1 计算几何学Voronoi图在计算几何学中有着广泛的应用。
它可以用于解决近似最近邻问题、最近点问题、空间索引和空间分析等。
通过构建Voronoi图,可以有效地进行空间数据查询和分析,以及空间关系的判断。
4.2 计算机图形学Voronoi图在计算机图形学中也有着重要的应用。
例如,在计算多边形的外包围盒时,可以使用Voronoi图的性质来进行快速计算。
利用Voronoi图生成的泰森多边形,可以用于三角剖分、分形图像生成和模拟等方面。
4.3 地理信息系统在地理信息系统中,Voronoi图被广泛应用于空间数据的分析和处理。
例如,通过构建基于Voronoi图的空间索引,可以实现快速的空间查询和聚类分析。
同时,Voronoi图还可以用于边界识别、地块划分和地理信息可视化等方面。
4.4 无线通信Voronoi图还可以用于无线通信系统中的基站规划和覆盖范围分析。
增删点后的Voronoi图生成算法-图学学报
收稿日期:2011-05-31;定稿日期:2011-07-15基金项目:中国测绘科学研究院基本科研业务费基金资助项目(7771113)作者简介:张 娟(1988-),女,甘肃兰州人,硕士,主要研究方向为数字摄影测量与三维建模。
E-mail :zhangjuanabcd@1 V oronoi 图的基础1.1 Voronoi 图的概念[1]如图1,L 是P 1P 2的垂直平分线,并将平面分成L 左和L 右两部分,位于L 左内的点P 左 具有特性:d (P 左, P 1)<d (P 左, P 2),即L 左内的点是比平面上其他点更接近于P 1的点的集合,记做V (P 1): V (P 1) = H (P 1, P 2),同理V (P 2) = H (P 2, P 1)。
增删点后的V oronoi 图生成算法张 娟1, 杜全叶2(1. 兰州交通大学,甘肃 兰州 730070;2. 中国测绘科学研究院,北京 100380)摘 要: V oronoi 图可广泛应用于模式识别、计算机图形学、计算机辅助设计、地理信息系统等领域。
利用V oronoi 图及其对偶图Delaunay 三角网构建的不规则三角网TIN 能充分地反映地形地貌特征,对TIN 的统一管理和动态调用可较好地应用到数字高程模型的建立中。
通过联机增量和减量算法来来实现增删点后的V oronoi 图的生成,具有能够动态修改点集、速度快、效率高等优势。
关 键 词:V oronoi 图;联机增量算法;减量算法;不规则三角网;数字地面模型 中图分类号:TP 391文献标识码:A 文 章 编 号:2095-302X (2013)01-0046-04The generating algorithm of Voronoi after adding and deleting pointsZhang Juan 1, Du Quanye 2( 1. Lanzhou Jiaotong University, Lanzhou Gansu 730070, China; 2. Chinese Academy of Surveying and Mapping, Beijing 100380, China )Abstract: V oronoi is also called Thiessen polygon, which is a continuous polygon made ofperpendicular bisectors by joining the two adjacent points. It is widely used in pattern recognition, computer graphics, computer aided design, geography information system and many other fields. A new approach of constructing TIN that represented terrain well was given based on V oronoi diagrams and Delaunay triangulation networks. It is easily to make full use of the management and loading of TIN in the establishment of DEM. The method of online incremental and reducing algorithm to realize the generation of V oronoi after adding and deleting points can change points actively, and it holds the superiorities of fast speed and high efficiency.Key words: V oronoi; Online adding algorithm; Deleting algorithm; TIN; DTM2013年 1月图 学 学 报 January 2013第34卷 第1期 JOURNAL OF GRAPHICS V ol.34 No.1LL左L右P左P右P1P2图1 V(P1),V(P2)图示图2 n=6时的一种V oronoi图给定平面上n个点的点集S={P1,P2,…,P n},定义V(P i)= H(P i,P j),即V(P i)表示比其他点更接近P i的点的轨迹是n-1个半平面的交,它是一个不多于n-1条边的凸多边形域,称为关联于P i的V oronoi多边形或关联于P i的V oronoi域。
voronoi方法

voronoi方法Voronoi方法是一种广泛应用于计算机图形学、图像处理和计算机视觉等领域的技术。
它通过利用Voronoi图的概念和性质,来对图像进行分割、滤波、提取等操作,从而实现对图像的优化处理。
本文将详细介绍Voronoi方法的基本原理、应用领域、算法流程以及优缺点,并给出一些实例来展示该方法的应用效果。
一、基本原理Voronoi图是一种基于空间点集的离散图,它表示在某个特定区域内,每个点与其最近邻点的关系。
在Voronoi图中,每个点都与其最近的边界相连,这个边界被称为“Voronoi边界”。
Voronoi图的性质和特点使其在图像处理中具有广泛的应用价值。
Voronoi方法的基本原理是将图像看作一个二维空间中的点集,通过计算每个像素点与其最近邻点的关系,构建Voronoi图。
根据Voronoi图的性质和特点,可以对图像进行分割、滤波、提取等操作,从而达到优化处理的效果。
二、应用领域Voronoi方法在计算机图形学、图像处理和计算机视觉等领域有着广泛的应用。
具体应用领域包括但不限于:1. 图像分割:利用Voronoi图的分割性质,可以将图像划分为不同的区域,从而实现图像的分割和提取。
2. 图像滤波:通过Voronoi图的滤波性质,可以对图像进行平滑处理,消除噪声和细节。
3. 形状识别:利用Voronoi图的空间信息,可以对图像中的形状进行识别和提取。
4. 图像变换:通过Voronoi图的变换性质,可以对图像进行压缩、转换和优化。
三、算法流程Voronoi方法的算法流程通常包括以下步骤:1. 初始化:将图像看作一个二维空间中的点集,将每个像素点作为节点,构建Voronoi图的基本结构。
2. 计算Voronoi边界:根据每个像素点与其最近邻点的关系,计算Voronoi边界,从而得到Voronoi图。
3. 图像处理:根据Voronoi图的性质和特点,对图像进行相应的处理操作,如分割、滤波、提取等。
泰森多边形(Voronoi图)生成算法
泰森多边形(Voronoi图)生成算法一、文档目的本文描述了在geomodel模块中,生成泰森多边形所使用的算法。
二、概述GIS和地理分析中经常采用泰森多边形进行快速插值,和分析地理实体的影响区域,是解决邻接度问题的又一常用工具。
荷兰气候学家A·H·Thiessen提出了一种根据离散分布的气象站的降雨量来计算平均降雨量的方法,即将所有相邻气象站连成三角形,作这些三角形各边的垂直平分线,于是每个气象站周围的若干垂直平分线便围成一个多边形。
用这个多边形内所包含的一个唯一气象站的降雨强度来表示这个多边形区域内的降雨强度,并称这个多边形为泰森多边形。
如图1,其中虚线构成的多边形就是泰森多边形。
泰森多边形每个顶点是每个三角形的外接圆圆心。
泰森多边形也称为Voronoi图,或dirichlet图。
图1 泰森多边形泰森多边形的特性是:●每个泰森多边形内仅含有一个离散点数据●泰森多边形内的点到相应离散点的距离最近●位于泰森多边形边上的点到其两边的离散点的距离相等泰森多边形可用于定性分析、统计分析、邻近分析等。
例如,可以用离散点的性质来描述泰森多边形区域的性质;可用离散点的数据来计算泰森多边形区域的数据;判断一个离散点与其它哪些离散点相邻时,可根据泰森多边形直接得出,且若泰森多边形是n边形,则就与n个离散点相邻;当某一数据点落入某一泰森多边形中时,它与相应的离散点最邻近,无需计算距离。
在泰森多边形的构建中,首先要将离散点构成三角网。
这种三角网称为Delaunay三角网。
三、Delaulay三角形的构建Delaunay三角网的构建也称为不规则三角网的构建,就是由离散数据点构建三角网,如图2,即确定哪三个数据点构成一个三角形,也称为自动联接三角网。
即对于平面上n个离散点,其平面坐标为(x i,y i),i=1,2,…,n,将其中相近的三点构成最佳三角形,使每个离散点都成为三角形的顶点。
图2 Delaunay三角网自动联接三角网的结果为所有三角形的三个顶点的标号,如:1,2,8;2,8,3;3,8,7;……为了获得最佳三角形,在构三角网时,应尽可能使三角形的三内角均成锐角,即符合Delaunay三角形产生的准则:1、任何一个Delaunay三角形的外接圆内不能包含任何其它离散点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Face*
incFace_; //pointer to left incidentge_; //pointer to CCW previous halfedge
Halfedge* nextEdge_; //pointer to CCW next halfedge
Voronoi 图生成算法的实现、
对比及演示实验报告
C组 张哲 2012212882 唐磊 2012212861 陈帅 2012212906
1. 实验内容
对 Voronoi 图的生成算法进行实现、对比及演示。
2. 数据结构
采用 DCEL 结构(下面所列代码去除了函数、只留下成员变量,具体见源码中 basic_types.h 文件):
3.1.2 重点及难点
DCEL 结构的填充与更新:每插入一个新的点之后,对 DCEL 结构的更新都需要保证不出 错。不能少更新或错更新,要保证 DCEL 结构的完整性及正确性。
多余边的删除与终止条件的判断:根据新加入的点位置的不同,对多余边的删除及终止 条件的判断会有所不同,需要针对每种情况考虑清楚相应的对策。
算法 2:merge
VoronoiDiagram* mergeVD(VoronoiDiagram* left, VoronoiDiagram* right)
{
VoronoiDiagram * result = new VoronoiDiagram();
vector<DevideChain> devideChain;
if(right ‐ left < 3) {
VoronoiDiagram * result = smallVD(origin, left, right);//分别计算 2 或 3 个 sites return result; }else { VoronoiDiagram * leftResult = partition(origin, left, (left+right)/2); VoronoiDiagram * rightResult = partition(origin, (left+right)/2 + 1, right); return mergeVD(leftResult, rightResult); } }
Point* midPoint_; //the midpoint of the two sites of this halfedge
Vector* direction_; //the direction of this halfedge
};
3. 算法描述
3.1 增量法
3.1.1 增量法概述
每次向 voronoi 图中增加一个点,寻找与这个点最近的 site,从这个 site 开始计算新加 入的点所统治的区域的边界,删除旧的边并更新 DCEL 结构,直到所有点都加入到图中为止。
边界跨越、其行进方向及终止条件的判断:同样的,由于新加入点的位置的不同(主要 是在不在原来所有的点构成的凸包内),对边界的跨越、其行进方向及终止条件的判断都会 有所不同。需要分别处理。
详细实现: 算法 1:递归分治
VoronoiDiagram* partition(vector<Point> &origin, int left, int right) {
do
{
tobottom = ((*leftMax).p == (*leftMin).p && (*rightMax).p == (*rightMin).p); chain = bisector(leftMax, rightMax);//得到 leftmax 和 rightMax 中垂线 leftPoint = computeIntersectionPoint(leftMax, chain);//计算 chain 与左 site 对 应 face 的交点 rightPoint = computeIntersectionPoint(rightMax,chain);//计算 chain 与右 site 对应 face 交点 if(leftPoint.y > rightPoint.y)//先与左边 site 相交
tangentLine(left‐>convex_hull, right‐>convex_hull, *leftMax,
*leftMin,
*rightMax, *rightMin);//通过凸包分别得到 upper bound 和 lower bound,构造后面
循环结束的条件.
bool tobottom = false;
Point p; private:
double x_, y_;
//coordinates of v
Halfedge* incEdge_; //pionter to any outgoing incident halfedge };
class Face
{
private:
Site* site_;
//the site of this face
class Site { public:
Point p; private:
double x_, y_; //coordinates of this site Face* incFace_; //the face that this site belongs to };
class Vertex { public:
left‐>convex_hull = GeometryTool::getConvexHullUseGrahamScan(left‐>sites);
right‐>convex_hull = GeometryTool::getConvexHullUseGrahamScan(right‐>sites);
Halfedge* incEdge_; //any incident halfedge
};
class Halfedge { public:
bool hasDraw;
private:
Halfedge* twinEdge_; //pointer to twin halfedge
Vertex* oriVertex_; //pointer to origin vertex