Voronoi图矢量算法
路径规划的主要算法与展望-应用数学论文-数学论文
路径规划的主要算法与展望-应用数学论文-数学论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——摘要:路径规划算法是智能领域中一项新兴的关键支撑技术;依据路径规划算法的实现原理,将其分为进化型算法与非进化型算法;再依据数学特征将非进化型算法细分为经典数学与几何图论两类;针对每类算法,分别从发展背景、设计思想、优缺点、改进与发展等方面简要归纳分析;最后对路径规划算法的未来发展趋势进行展望。
关键词:路径规划; 进化型算法; 非进化型算法; 未来展望;Summary of Path Planning AlgorithmsLIANG Xiao-hui MU Yong-hui WU Bei-hua JIANG YuShijiazhuang Campus of Army Engineering UniversityAbstract:Path planning algorithm is an emerging key supporting technology in the field of intelligence; According to the implementation principle of path planning algorithm, it is divided into evolutionary algorithm and non-evolutionary algorithm; Then based on the mathematical characteristics, the non-evolutionary algorithm can be divided into two types: classical mathematics and geometric graph theory; For each type of algorithm, the paper will give a brief summary and analysis from some aspects: the background of development,design ideas, advantages and disadvantages, improvement. Finally the future development trend of the path planning algorithm is forecasted.0 引言路径规划(Path Planning)[1]是智能技术中的热点研究问题,已在多领域有所突破并成功得以应用。
浅析平面Voronoi图的构造及应用.ppt
编写容易 分治法构造Delaunay三角剖分法 易于理解
Voronoi图的构造
用分治法构造角最优三角剖分,首先要对点集依照X坐 标排序。如果点集内点的个数小于等于三,那么可以直接构 造,否则将点集拆分成为两个含点数目近似的点集进行构造, 最后合并这两个点集。
点集内含点 个数为2的
情况
点集内含点 个数为3的
新增点
Voronoi图拓宽解题思路 原来障碍点
接下来,由于人还可以从走廊边与障碍物之间通过,那么对于每一个障 碍点(x,y)我们可以在走廊壁上增加障碍点(x,0),(x,W),一共增加2n个障碍 点 。 另外 在走 廊开 始和尽 头增 加四个 障碍 点( -W,0),(-W,W), (L+W,0),(L+W,W)这四个点与其它点之间距离不小与W,这样就 不影响结果。然后对于这3n+4个点求Voronoi图。
Ta
c
a
Tb b
Voronoi图与平面MST问题
根据这个条件,我们可以得到一个新的方案,构造角 最优三角剖分,然后计算最小生成树,总的时间复杂度是 O(n log n)。
可能大家会问这样一个问题:
除了距离问题,Voronoi图还有什么用呢?
我想告诉大家!Voronoi图不仅能快速解决距离问题
Voronoi图还可以扩宽我们的解题思路
的
交
点
D C
B
所求点
A
Voronoi图的在信息学中的应用
根据刚才分析的两种情况,我们可以构造两种方 案。第一种方案针对所求点为过三个点的圆的圆心的 状态,我们枚举三个点,求出它们组成的三角形的外 心和半径,然后枚举其它的点,看它们是不是在这个 圆中。第二种方案是枚举两个点的中垂线,求出中垂 线与矩形的交点,然后根据这三个点来计算最远位置, 进行判断。
空间分析-Voronoi图构建方法与应用

湖北大学资源环境学院
i 1
王新生 2019/3/9
点集分布的判别标准
当某个点集的空间分布为规则分布时,CV是 低的。当为集群分布时,在集群(“类”)内的 Voronoi多边形面积较小,而在集群间的面积较大, CV是高的。但是,应该注意的是,规则的周期结 构也会导致较高的CV值;周期性重复出现的集群 分布也会形成高的CV值。 Duyckaerts and Godefroy (2000)提出了三 个建议值,当点集为随机分布时,CV值为57% (包括从33%到64%);当点集为集群分布时, CV值为92%(包括大于64%);当点集为规则分 布时,CV值为29%(包括小于33%)
湖北大学资源环境学院
的随机分布,不同于泊 松分布的两种情况是空间规则分布和集群分布。 Voronoi分割可以帮助我们判断点集的空间分布属 于那一种形式。当点集在平面上呈现泊松分布时, Voronoi多边形面积是有变化的,有些是面积大的 Voronoi多边形,有些是面积小的Voronoi多边形。 Voronoi多边形面积的变化性是很容易通过其方差来估 计的。变异系数(the coefficient of variation, CV)是 Voronoi多边形面积的标准差与平均值的比值,它可以 衡量现象在空间上的相对变化程度。 n 标准差计算公式: 2
湖北大学资源环境学院
王新生 2019/3/9
湖北大学资源环境学院
王新生 2019/3/9
任意形状发生元Voronoi图构建的栅格方法
1 d ( p ,p d ( p ,p w , w i) i) i 2 w i 1
wi1>0、wi2是加权Voronoi图的权重。 当 wi2=0 时 产 生 倍 增 的 加 权 Voronoi 图
Voronoi图

增添法的基本步骤:
①搜索最邻近单元和相邻单元
最邻近单元为Pn+1所在原V图中某点 的Voronoi多边形Vk以及原来与它 相邻的若干个多边形及相应生成 元;
②局部更新
对于各邻近单元,首先与最邻近单
元Vk中Pk作中垂线,并找其余Vk 的交点,由于Vk是凸多边形,因 而只产生两个交点1、2,1与2连 线把与Vk相关的单元分为“两 半”:与Pn+1“相关的一半”及 “不相关的一半”,使Pn+1与相 关一半的各生成元Pk+1, Pk+2…作 中垂线围成各封闭多边形,即是
增添法 部件合成法
(一)对偶生成法
对偶生成法:主要是指生成V图时先生成其对偶元 Delaunay三角网,再通过做三角网每一三角形三条 边的中垂线,形成以每一三角形顶点为生成元的多 边形网 。
对偶生成法生成V图
对偶生成法的关键是Delaunay三角网的生成。
Delaunay三角网的特性: 任一三角形外接圆内部包含其他点; 三角形均衡或三边均衡,其最小角最大; 使三角网总边长最小; 在确定的n个点上,构造的Delaunay三角网网形唯一。
部件合成
(四)矢量方法生成V图的分析
以上三种方法是矢量方法中常用的,随着并行处理技术的 发展,V图生成页、也出现了并行算法,它使各生成元同 时进行各点的V图计算;
矢量方法生成V图的算法和数据结构都较为复杂,其生成 元是基于离散点集的,对于实际的地理信息,这远远不够, 应该拓展成点、线、面、体及其组合的复杂形体;
Vi Vj
PV1 V2 ...Vn R2 (假定到Pi为0的点不算在Vi内)
Voronoi图
对于光滑、不光滑组合曲线及相应组合成的封闭面域,尽 管可用折线逼近,但折线毕竟不是曲线,在曲线光滑处, 每一点都是转折点,而化为折线,折线交接处的点就成为 唯一转折点,性质突变处。
义G的Voronoi图V(G)为
V(G)={V(g1),V(g2),…,V(gn)} 一般V图特性在广义V图中类似存在。
5.2 V图生成方法
V图有着按距离划分邻近区域的普遍特性,应 用范围广。
生成V图的方法很多,一般分为两种: 矢量方法 栅格方法
一、生成V图的矢量方法
矢量方法生成V图大多是对点实体。 方法分为:对偶生成法
义G的Voronoi图V(G)为
V(G)={V(g1),V(g2),…,V(gn)}
V图是与距离紧密相关的,而距离值是由尺度所 基本定义的。不同尺度,距离的概念不一样, 数值往往也不一样,因此不同的尺度空间,有 不同的V图。上述定义同样可推广到3维。
(二)广义Voronoi图
拓展Voronoi图为广义Voronoi图具有广泛意义。
(二)性质
假设平面上有n个离散点,其对应的Voronoi多边
形分别为V1,V2…Vn, Voronoi多边形之间除边
界外,其交集为空集,所有Voronoi多边形的并集 为二维平面R2,即
Vi Vj
PV1 V2 ...Vn R2 (假定到Pi为0的点不算在Vi内)
V1 V2 ...Vn R2
V图、障碍V图、广义V图的多边形边界提供了点、 线、面全形态,障碍、非障碍完备空间,广义加 权距离的等距线、等比线、等势线等,是具有严 密数学意义且极广泛使用价值的轨迹线。
维诺图(VoronoiDiagram)分析与实现

维诺图(VoronoiDiagram)分析与实现一、问题描述1.Voronoi图的定义又叫泰森多边形或Dirichlet图,它是由一组由连接两邻点直线的垂直平分线组成的连续多边形组成。
2.Voronoi图的特点(1)每个V多边形内有一个生成元;(2)每个V多边形内点到该生成元距离短于到其它生成元距离;(3)多边形边界上的点到生成此边界的生成元距离相等;(4)邻接图形的Voronoi多边形界线以原邻接界线作为子集。
3.Voronoi的应用在计算几何学科中的重要地位,由于其根据点集划分的区域到点的距离最近的特点,其在地理学、气象学、结晶学、航天、核物理学、机器人等领域具有广泛的应用。
如在障碍物点集中,规避障碍寻找最佳路径。
二、算法分析与设计Voronoi图有着按距离划分邻近区域的普遍特性,应用范围广。
生成V图的方法很多,常见的有分治法、扫描线算法和Delaunay三角剖分算法。
1.建立Voronoi图方法和步骤本次实验采用的是Delaunay三角剖分算法。
主要是指生成Voronoi图时先生成其对偶元Delaunay三角网,再找出三角网每一三角形的外接圆圆心,最后连接相邻三角形的外接圆圆心,形成以每一三角形顶点为生成元的多边形网。
如下图所示。
建立Voronoi图算法的关键是对离散数据点合理地连成三角网,即构建Delaunay三角网。
建立Voronoi图的步骤为:(1)离散点自动构建三角网,即构建Delaunay三角网。
对离散点和形成的三角形编号,记录每个三角形是由哪三个离散点构成的。
(2)计算每个三角形的外接圆圆心,并记录之。
(3)遍历三角形链表,寻找与当前三角形pTri三边共边的相邻三角形TriA,TriB和TriC。
(4)如果找到,则把寻找到的三角形的外心与pTri的外心连接,存入维诺边链表中。
如果找不到,则求出最外边的中垂线射线存入维诺边链表中。
(5)遍历结束,所有维诺边被找到,根据边画出维诺图。
Voronoi图
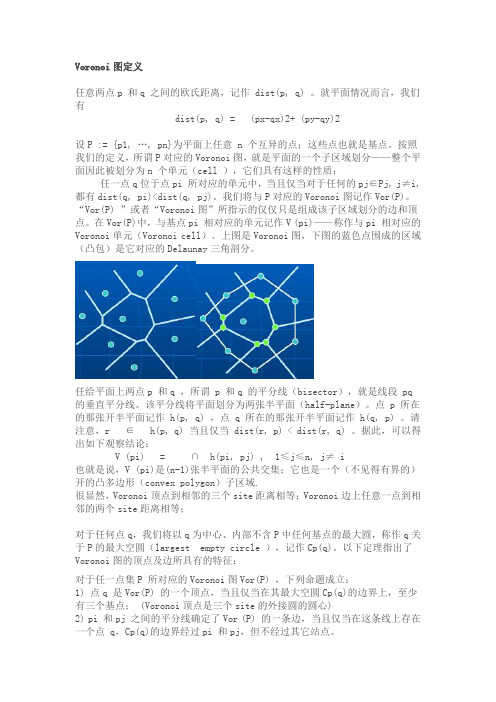
Voronoi图定义任意两点p 和q 之间的欧氏距离,记作 dist(p, q) 。
就平面情况而言,我们有dist(p, q) = (px-qx)2+ (py-qy)2设P := {p1, …, pn}为平面上任意 n 个互异的点;这些点也就是基点。
按照我们的定义,所谓P对应的Voronoi图,就是平面的一个子区域划分——整个平面因此被划分为n 个单元(cell ),它们具有这样的性质:任一点q位于点pi 所对应的单元中,当且仅当对于任何的pj∈Pj, j≠i,都有dist(q, pi)<dist(q, pj)。
我们将与P对应的Voronoi图记作Vor(P)。
“Vor(P) ”或者“Voronoi图”所指示的仅仅只是组成该子区域划分的边和顶点。
在Vor(P)中,与基点pi 相对应的单元记作V (pi)——称作与pi 相对应的Voronoi单元(Voronoi cell)。
上图是Voronoi图,下图的蓝色点围成的区域(凸包)是它对应的Delaunay三角剖分。
任给平面上两点p 和q ,所谓 p 和q 的平分线(bisector),就是线段 pq 的垂直平分线。
该平分线将平面划分为两张半平面(half-plane)。
点 p 所在的那张开半平面记作 h(p, q) ,点 q 所在的那张开半平面记作 h(q, p) 。
请注意,r ∈ h(p, q) 当且仅当 dist(r, p) < dist(r, q) 。
据此,可以得出如下观察结论:V (pi) = ∩ h(pi, pj) , 1≤j≤n, j≠ i也就是说,V (pi)是(n-1)张半平面的公共交集;它也是一个(不见得有界的)开的凸多边形(convex polygon)子区域.很显然,Voronoi顶点到相邻的三个site距离相等;Voronoi边上任意一点到相邻的两个site距离相等;对于任何点q,我们将以q为中心、内部不含P中任何基点的最大圆,称作q关于P的最大空圆(largest empty circle ),记作Cp(q)。
分区加权Voronoi图的性质及其面积计算_马立玲
· 195 ·
图1
Vo ro noi 图的基本性质[ 4] 如下 。 性质 1 生成元 pi 的 V o ronoi 区域 V(pi)无界 的充分必 要条件是 pi ∈ BC H(P), 其中 BC H(P)表示生成 元集合 S 的 凸壳边界 。 性质 2 n 个点的 点集 S 的 Vo ro noi 图至多 有 2n -5 个 顶点和 3n -6 条边 。 性质 3 每个 Vo ro no i 点恰好是 3 条 Vo ro noi 边的交点 。 性质 4 点集 S 中的 点 p i 的 每一 个最 近临 近点 确定 V (pi)的一条边 。 2 .2 加权 V o ronoi 图 定义 2 给定平面 上 n 个点的 集合 S ={p1 , p2 , … , pn}, 对每个生成元 pi(i =1, 2 , … , n), 赋以非 负实数权重 vi(i =1 , 2 , … , n), 称 D(p , pi)=d(p -pi)/ vi 为 p 和 p i 间 的加 权距 离 , 称 V(pi , vi)=∩ {p D(p , pi)<D(p , pj)}为 点 pi 的权重
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章
Voronoi图构建算法
(based on Vector)
2011.6
GIS原理与算法
Voronoi图
Voronoi图是计算几何中最重要的几何结构之一(紧次于凸壳),
它描述了对于一系实体集的邻近性问题。
邮局问题;
观测台问题;
学校(医院)问题;
Voronoi图
Voronoi图的概念是由Dirichlet在1850年首先提出; 俄国数学家Voronoi于1907年在文章中做了进一步阐述,并提出高次方程化简;
气象学家Thiessen在1911年为了提高大面积气象预报结果,应用Voronoi图对观测站进行划分观测区域(多边形);
为了纪念这些科学家的成就,这种结构被称为Dirichlet剖分或Voronoi图或Thiessen多边形。
主要内容
Definitions & Properties (定义和性质) Vector Algorithm (矢量算法)
Order-k VD (多阶VD)
Line and area VD (线和面的VD)
Minkowski metric VD (M度量VD)
Other Voronoi diagram (其他VD)
Applications (应用)
}i
Properties(1)
假设:集合S中,没有四点是共圆的。
Voronoi图是度数为三的正则图(图论),即:Voronoi图的每一个顶点恰好是图解的三条边的交点。
在S中,pi的每一个最邻近点确定一条Voronoi图多边形的一条边。
多边形V(i)是无界的当且仅当pi是集合S的凸壳的边界上的一个点。
对于S的Voronoi图的每一个顶点v,圆C(v)不包含S 的其它的点(最大空圆)。
Properties of D(p)& V(p)
Each Voronoi region
2、Vector Algorithm
•自Shamos和Hoey[1975]把Voronoi图作为一种有效的数据结构引入计算机领域,并成为计算几何领域的主要研究热点之一。
•许多学者对:
•平面点集Voronoi图的算法[Shamos & Hoey, 1975;
Hwang,1979; Lee,1980,………]
•平面特殊复杂实体的Voronoi算法,如线段
[Kirkpatrick, 1979]、线状或非交圆片状[Lee, 1981]、任意圆片状[Sharir,1985]、平面凸壳[Leven &
Sharir,1987]和曲线[Yap,1987] 等做了深入的研究,
并建立了许多有效的算法,
以上算法都是以离散点集算法为基础。
经典点
2.1 增量法(Incremental Method)
1.基本原理:
增量法
2. 边界问题
三点设置:
增量法
增量法
4.数据的层次组织
增量法
增量法
5.详细算法
增量法
2.2 分治法(Divide-and-conquer Method)
1.基本原理:
分治法
1.基本原理:
分治法
2.Assumptions & preprocess
•点按X坐标的增量排序,表示为:
•三个假设:
•Numerical computation is carry out in precise arithmetic;
•No four generators align on a common circle;
•No two generators align vertically.
分治法
3. 算法结构:
3.4
3.1
3.1
3.1
分治法
分治法
3.2
分治法
分治法
3.4
分治法
扫描法——预处理
扫描法——预处理
扫描法——算法
SDGF
扫描法
SDGF
扫描法
Complexity analysis:
扫描法-2
SDGF
SDGF
扫描法-2
扫描法-2
Sites event:
扫描法-2
Vertex events
扫描法-2
扫描法-2
Data structure:
At a site event a new edge starts to grow;
At a circle event two growing edges meet to form a vertex.
Two standard data structure :
An event queue;
A structure that represents the status of the sweep line;
1) Bounding box:
扫描法-2
2) The beach line is represented by a balanced binary search tree :
Its leaves correspond to the arcs;
It is x-monotone -----in an ordered manner;
Each leaf store the site that defines the arc it represents;
A breakpoint is stored at an internal node by an order tuple
of sites <pi, pj>;
扫描法-2
3) Detecting the circle events:
Two breakpoints in the consecutive triples not converge;
Even if a triple has converging breakpoints, the corresponding circle event need not take place----a false alarm;
The triple with the new arc being the middle one can never
cause a circle event;
扫描法-2。