第3章 动态规划_作业-3.22
动态规划讲解大全含例题及答案

动态规划讲解大全含例题及答案动态规划讲解大全动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程(decision process)最优化的数学方法。
20世纪50年代初美国数学家R.E.Bellman等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优化原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法——动态规划。
1957年出版了他的名著Dynamic Programming,这是该领域的第一本著作。
动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。
例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。
虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。
动态规划程序设计是对解最优化问题的一种途径、一种方法,而不是一种特殊算法。
不象前面所述的那些搜索或数值计算那样,具有一个标准的数学表达式和明确清晰的解题方法。
动态规划程序设计往往是针对一种最优化问题,由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的设计方法对不同的问题,有各具特色的解题方法,而不存在一种万能的动态规划算法,可以解决各类最优化问题。
因此读者在学习时,除了要对基本概念和方法正确理解外,必须具体问题具体分析处理,以丰富的想象力去建立模型,用创造性的技巧去求解。
我们也可以通过对若干有代表性的问题的动态规划算法进行分析、讨论,逐渐学会并掌握这一设计方法。
基本模型多阶段决策过程的最优化问题。
在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。
第3章 动态规划_作业-3.22
0.36
0 1 2 3
1 0.24
2
3
4
5
6 1
0
1
2
3
4
5
6
0
0.6
0.18
1
0
0.36
0.09
2
1 2
0
0.31
0.13 0.56
3 4 0.3 0.42
2 3
4
5 6 7
0
4 4
0
4
5
6 7
5 5
0
0.06
5 6
k 3 : C ( 3, 2 ) C ( 4 , 4 ) C ( 3,4) m in k 4 : C ( 3 , 3 ) C ( 5 ,4 )
式1 式2
C(i, j)=min{C(i, k-1)+C(k+1, j)+w(i,j)} (1≤i≤j≤n, i≤k≤j) =min{C(i, k-1)+C(k+1, j)}+w(i,j) (1≤i≤j≤n, i≤k≤j) 式3
0 1 0.24 2 3 4 5 6 1 2 0.09 3 0.13 4 0.3 5 0.06 6 7 0 1 2 3 4 5 6
s
0 0.18 0.42 0.6
C(i, i-1)=0 (1≤i≤n+1) C(i, i)=pi (1≤i≤n)
式1 式2
C(i, j)=min{C(i, k-1)+C(k+1, j)+w(i,j)} (1≤i≤j≤n, i≤k≤j) =min{C(i, k-1)+C(k+1, j)}+w(i,j) (1≤i≤j≤n, i≤k≤j) 式3
矿大算法第3章 动态规划_习题课

2013年1月7日星期一 2013年1月7日星期
第3章 动态规划 第3章 动态规划
Байду номын сангаас
10
10
即 ai最小, i 就应排在最前面; bj最小, j 应排在最后面 得同顺序流水作业调度问题解法: ① min{a1,a2,…,an,b1,b2,…,bn}=ai , 那么作业i就应该是 最优调度中的第一个作业 min{a1,a2,…,an,b1,b2,…,bn}= bj , 那么作业j就应该是 最优调度中的最后一个作业 ② 在余下的作业中重复上述操作
s[1][5] 2
2013年1月7日星期一
第3章 动态规划
6
1 1 0 2 3 4 5
2 50 0
3 4 150 90 50 0 30 20 0
5 190 90 40 200 0
1 1 0 2 3 4 5
2 1 0
3 2 2 0
4 2 2 3
5 2 2 4 4 0
0
m[i][j]
s[i][j]
2013年1月7日星期一 2013年1月7日星期 第3章 动态规划 第3章 动态规划
13
13
p[n 1] {(0,0)}
m j wi max{ (i 1, j ), m(i 1, j wi ) vi } m(i, j ) m(i 1, j ) 0 j wi
b[i][j ] 1
b[i ][ j ] 2 b[i ][ j ] 3
表示Xi与Yj的公共子序列是由Xi-1与Yj-1的 Y 0 公共子序列在尾部加上Xi得到的子序列;
(xi-1 yi-1) 表示Xi与Y,j的公共子序列和Xi-1与Y(xi-1, yi) j的公 共子序列相同;
《动态规划》课件

xx年xx月xx日
• 动态规划概述 • 动态规划的基本概念 • 动态规划的求解方法 • 动态规划的应用实例 • 动态规划的优化技巧 • 动态规划的总结与展望
目录
01
动态规划概述
定义与特点
定义
动态规划是一种通过将原问题分解为 相互重叠的子问题,并存储子问题的 解以避免重复计算的方法。
特点
动态规划适用于具有重叠子问题和最 优子结构的问题,通过将问题分解为 子问题,可以找到最优解。
动态规划的适用范围
最优化问题
01
动态规划适用于解决最优化问题,如最大/最小化问题、决策问
题等。
子问题重叠
02
动态规划适用于子问题重叠的情况,即子问题之间存在共享状
态或参数。
递归关系
03
动态规划适用于具有递归关系的问题,可以通过递归方式求解
机器调度问题
总结词
动态规划可以应用于机器调度问题,以确定最优的调度方案,满足生产需求并降低成本 。
详细描述
机器调度问题是一个经典的优化问题,涉及到如何分配任务到机器上,以最小化成本或 最大化效率。通过动态规划,可以将机器调度问题分解为一系列子问题,如确定每个任 务的调度顺序、分配机器等,并逐个求解子问题的最优解,最终得到整个调度方案的最
VS
详细描述
记忆化搜索法是一种优化技术,通过存储 已解决的子问题的解,避免重复计算,提 高求解效率。这种方法适用于子问题数量 较少且相互独立的情况。
04
动态规划的应用实例
最短路径问题
总结词
通过动态规划解决最短路径问题,可以找到 从起点到终点的最短路径。
详细描述
在图论中,最短路径问题是一个经典的优化 问题,旨在找到从起点到终点之间的一条路 径,使得路径上的所有边的权重之和最小。 动态规划是一种有效的解决方法,通过将问 题分解为子问题并存储子问题的解,避免了 重复计算,提高了求解效率。
《动态规划课件》课件

应用场景:求解最短路径、背 包问题等
注意事项:避免重复计算子问 题和记忆化搜索
定义:将问题划分为 若干个较小的子问题, 并逐个解决子问题, 最终得到原问题的解
特点:将原问题分解为 更小的子问题,通过求 解子问题的最优解得到 原问题的最优解
应用场景:适用于 具有重叠子问题和 最优子结构特性的 问题
示例:背包问题、 最大子段和问题等
分段算法的代码 实现
分段算法的时间 复杂度分析
避免重复计算:使用备忘录或动态规划表来记录已计算过的子问题 减少子问题的数量:通过合并或减少不必要的子问题来降低计算复杂度 选择合适的递归方式:根据问题的特点选择最优的递归方式 优化递归栈:通过减少递归深度或使用循环代替递归来提高性能
优化算法:动态规划可以优化算法,提高计算效率 避免重复计算:通过记忆化搜索,避免重复计算,提高计算速度
添加标题ቤተ መጻሕፍቲ ባይዱ
添加标题
添加标题
添加标题
动态规划与分治法比较:分治法将 问题分解为子问题,而动态规划将 子问题联系起来
动态规划与回溯法比较:回溯法会 穷举所有可能解,而动态规划可以 避免不必要的搜索
机器学习与深度 学习中的动态规 划
自然语言处理中 的动态规划
计算机视觉中的 动态规划
推荐系统中的动 态规划
最大子段和问题的定义 最大子段和问题的应用场景 最大子段和问题的解决方法 最大子段和问题的实际应用案例
定义:矩阵链乘法问题是一种优化问题,通过动态规划算法来求解
应用场景:在科学计算、机器学习、图像处理等领域都有广泛的应用
算法原理:通过动态规划算法,将矩阵链乘法问题转化为子问题,从而避免重复计算,提高 计算效率
应用场景:背包问题在计算机科学、运筹学、经济学等领域都有广泛的应用,如资源分配、路径规划、时间表安 排等。
第3章 动态规划(3-例子)
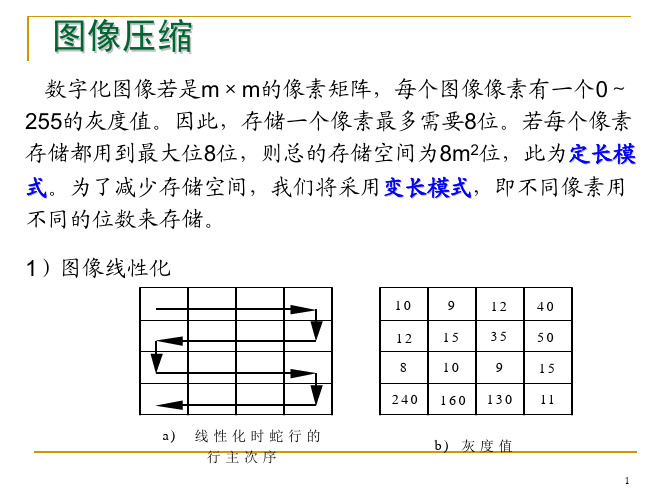
图像压缩问题要求确定像素序列{p1,p2,…,pn}的最优分段,使 得依此分段所需的存储空间最少。每个分段的长度不超过256 6 位。
最优子结构性质
设l[i],b[i],是{p1,p2,…,pn}的最优分段。显而易见,l[1],b[1] 是{p1,…,pl[1]}的最优分段,且l[i],b[i],是{pl[1]+1,…,pn}的最优分 段。即图像压缩问题满足最优子结构性质。 设s[i],1≤i≤n,是像素序列{p1,…,pi}的最优分段所需的存储位 数。由最优子结构性质易知:
可得到4个段[10,9,12]、[40,50,35]、[15,12,8,10,9,15,11]、 [130,160,240]。 SegmentLength这项内容为2,2,6,2; BitsPerSegment这项内容为3,5,3,7; Pixels序列:1010 1001 1100 111000 110010 100011 这三个部分需要的存储空间共需以下各项之和: 8*4=32 3*4=12 4×3+6×3+4×7+8×3=82 总空间: 32+12+82=126位 3
11
n
0-1背包问题
设所给0-1背包问题的子问题
max v k x k
k i
n wk x k j k i x k {0,1}, i k n
n
的最优值为m(i,j),即m(i,j)是背包容量为j,可选择物品为i, i+1,…,n时0-1背包问题的最优值。由0-1背包问题的最优子 结构性质,可以建立计算m(i,j)的递归式如下。
10
0-1背包问题
给定n种物品和一背包。物品i的重量是 wi,其价值为vi,背包的容量为C。问 应如何选择装入背包的物品,使得装入 背包中物品的总价值最大? 0-1背包问题是一个特殊的整数规划问 题。
第3章 动态规划
第3 章动态规划3.1 用表代替递归3.2 0-1背包问题3.3 矩阵链乘问题3.4 动态规划的基本元素3.5 备忘录方法3.6 装配线调度问题3.7 最长公共子序列3.8 最优二分检索树3.9 凸多边形最优三角剖分3.1 用表代替递归时的递归结构,由图3-1是利用递归算法计算斐波那契数F7此可见,重复计算的子问题数导致了指数级的复杂度。
,递归算法进行了多次重叠子问题图3-1表明,为了计算F7的递归调用,而这些重叠子问题导致了指数级的算法。
在这个例=8的子中,在第二次调用中忽略了前次调用所做的计算。
计算F6递归调用如图3-2所示。
树中每一个节点代表所计算的斐波那契数。
由于多重递归,导致了大量重复计算。
113832152353221 211111 1111111111111图3-1 计算斐波那契数算法的递归结构(n=7)第3 章动态规划1 F (1)8 F (6)5 F (5)3 F (4)2 F (3)1 F (2)1 F (1)0 F (0)1 F (2)1 F (1)0 F (0)2 F (3)1 F (1)1 F (2)1 F (1)0 F (0)3 F (4)2 F (3)1 F (2)1 F (1)1 F (2)1 F (1)0 F (0)1 F (1)与此相应,如果我们用一个数组作为数据结构,将计算的:前n个数存储在数组中,就可以用线性时间计算斐波那契数Fn F[0]← 0;F[1]← 1;for i← 2 to ndo F[i]←F[i-1]+F[i-2]计算结果F呈指数级增长,但是,所需数组规模较小。
例如,nF45=1836311903是32位整数所能表示的最大斐波那契数,因此,大小为46的数组即可。
这种技术为我们得到递归关系的数值解提供了直接途径。
在斐波那契数的情形下,我们甚至可以省略数组,只保存前两个数值;对于遇见的其他情形,也可能需要保存所有已知数值的一个数组。
递归方程是值为整数的递归函数。
第3章-动态规划
1
虽然现在工作站或小型机等机型上都有更高精度 的数值类型,但这些机型价格昂贵,只有大型科研机 构才有可能拥有,一般不易接触。当我们需要在个人 机上,对超过长整型的多位数(简称为“高精度数 据”)操作时,只能借助于数组才能精确存储、计算。
2
【例】编程求当N较大时,N!的准确值 问题分析:问题要求对输入的正整数N,计算N!的准 确值,而N!的增长速度仅次于指数增长的速度,所以 这是一个高精度计算问题。 例如: 9!=362880 100! = 93 326215 443944 152681 699263 856266 700490 715968 264381 621468 592963 895217 599993 229915 608914 463976 156578 286253 697920 827223 758251 185210 916864 000000 000000 000000 000000
i j 0 m[i , j ] m in{m[i , k ] m[k 1, j ] P P P } i j i 1 k j i k j
设立标记函数:为了确定加括号的次序,设计表 s[i,j], 记录求得最优时最后一次运算的划分位置
11
算法1:递归实现
k 1
数学归纳法证明 T(n)2n1 n=2,显然为真 假设对于任何小于n 的 k 命题为真, 则
T ( n ) O ( n ) 2 T ( k ) O ( n ) 2 2 k 1
k 1 k 1
n 1
n 1
O( n) 2( 2 n1 1) 2 n1
复杂性:行2,3,7循环进行都是O(n),循环内为O(1) W(n)=O(n3)
15
动态规划专题讲义课件
VS
状态转移方程是动态规划中的重要概念,它描述了状态之间的转移关系。在求解问题时,通过状态转移方程可以将一个状态转移到另一个状态,从而逐步求解出问题的最优解。
状态转移方程的建立需要通过对问题进行深入分析,找出状态之间的依赖关系,并建立数学模型。在应用状态转移方程时,需要注意状态的初始状态和终止状态,以及状态转移过程中的约束条件。
02
动态规划的基本概念
最优化原理是动态规划的核心思想,它认为一个问题的最优解可以通过子问题的最优解来构建。在解决复杂问题时,将问题分解为若干个子问题,分别求解子问题的最优解,再利用子问题的最优解来求解原问题的最优解。
最优化原理的应用范围很广,包括计算机科学、运筹学、经济学等领域。通过将问题分解为子问题,可以降低问题的复杂度,提高求解效率。
自顶向下策略
自底向上策略
分支定界法:通过将问题分解为多个分支来解决问题,同时使用界限来排除不可能的解。与动态规划结合,可以更有效地处理具有大量状态和决策的问题。
THANK YOU
感谢各位观看
排班问题
如求解最优的排班方案,使得员工的工作计划合理且满足各种约束条件。
03
递推关系
建立子问题的解之间的递推关系,通过这种关系逐步求解更大规模的问题,直到达到原问题的解。
01
将原问题分解为子问题
将原问题分解为若干个子问题,这些子问题是原问题的较小规模或部分问题的解。
02
存储子问题的解
将已解决的子问题的解存储起来,以便在求解更大规模的问题时重复使用,避免重复计算。
03
动态规划的算法实现
状态空间法是动态规划的基本方法,通过构建状态转移方程来求解最优化问题。
状态转移方程描述了从状态转移至其他状态的过程,通过迭代更新状态变量的值,最终得到最优解。
第3章 动态规划
7
完全加括号的矩阵连乘积
完全加括号的矩阵连乘积可递归地定义为: (1)单个矩阵是完全加括号的; (2)矩阵连乘积 A 是完全加括号的,则 A 可 表示为2个完全加括号的矩阵连乘积 B 和 C 的乘积并加括号,即 A = (BC )
设有四个矩阵 它们的维数分别是: A, B, C , D,它们的维数分别是:
10
矩阵连乘问题
给定n 给定n个矩阵 { A1 , A2 ,..., An } , 其中 Ai 与 Ai +1 是可乘 考察这n 的, i = 1,2,..., n − 1 。考察这n个矩阵的连乘积
A1 A2 ... An
由于矩阵乘法满足结合律,所以计算矩阵的连乘可以 由于矩阵乘法满足结合律, 有许多不同的计算次序。 有许多不同的计算次序。这种计算次序可以用加括号 的方式来确定。 的方式来确定。 若一个矩阵连乘积的计算次序完全确定, 若一个矩阵连乘积的计算次序完全确定,也就是说该 连乘积已完全加括号,则可以依此次序反复调用2个矩 连乘积已完全加括号,则可以依此次序反复调用2 阵相乘的标准算法计算出矩阵连乘积
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A1A2A3A4A5 p = (5, 3, 9, 2, 2, 4)
0 135 84 0 54 0 96 66 36 1 90 88 1 2 1 2 3 1 3 3 4 3
0
16
0
5×5
4
4
5
5×5
M矩阵
S矩阵
3. 计算m[i,i+3] (i=1, 2): (矩阵链长度为3) m[2][5] = min 2≤k<5 { m[2][2] + m[3][5] + p1p2p5, m[2][3] + m[4][5] + p1p3p5, m[2][4] + m[5][5] + p1p4p5} = { 196, 94, 90 } = 90
0 1 2 3 4 5 6 7 1 2 3 4 5 6 1 0 1 2 3 4 5 6
0
0.24
0.6
0.18
1
ห้องสมุดไป่ตู้
0
0.36
0.09
2 3
1 2
0
2 3
0
0.13
4
0.3 5 0.06 6 7
4
5 6
0
0
0
二维表C
二维表R
3 p s 0 0.09 0.27 0.36 k 2 : C ( 2,1) C ( 3,3) s2 C ( 2,3) m in 3 p s 0.18 0 0.27 0.45 k 3 : C ( 2, 2 ) C ( 4 , 3 ) s2
完成后通过S 矩阵得出最 优完全加括 号方式为:
( ( A1 ( A2 ( A3 A4 ) ) ) A5 )
课后练习
• 练习2:假定有6个键值,k1、k2、k3、k4、k5、 k6,其中k1≤k2≤k3≤k4≤k5≤k6。它们被搜索的概 率分别为 {0.24,0.18,0.09,0.13,0.3,0.06}, 请使用动态规划算法求一颗最优二叉搜索树, 要求:
1. 给出该树的平均查找长度;
2. 画出树形。
k1≤k2≤k3≤k4≤k5≤k6, {0.24, 0.18, 0.09, 0.13, 0.3, 0.06}
C(i, i-1)=0 (1≤i≤n+1) C(i, i)=pi (1≤i≤n) 式1 式2
C(i, j)=min{C(i, k-1)+C(k+1, j)+w(i,j)} (1≤i≤j≤n, i≤k≤j)
1
2 3 4
0
0.6
0.18
1
0
1 2 3 4 5 6
0
0
5
6 7
0
0
0
二维表C
k 1 : C (1,0) C ( 2,2) C (1,2) m in k 2 : C (1,1) C ( 3,2)
二维表R
p
s 1 2
2
s 1
0.6 p s 0.24 0 0.42 0.66
• 用动态规划法求解最优计算顺序,写出计算过程 以及加括号的计算顺序表达式。
0
135 0
1
54 0 36 0 16 0
5×5
1 2
2 3
3
4 4 5
5×5
M矩阵 S矩阵 1. 计算m[i,i+1] (i=1, 2, 3, 4): (矩阵链长度为2) m[1][2] = min 1≤k<2 {m[1][1]+m[2][2]+p0p1p2} = 135 m[2][3] = min 2≤k<3 {m[2][2]+m[3][3]+p1p2p3} = 54 m[3][4] = min 3≤k<4 {m[3][3]+m[4][4]+p2p3p4} = 36 m[4][5] = min 4≤k<5 {m[4][4]+m[5][5]+p3p4p5} = 16
s
0 0.18 0.42 0.6
C(i, i-1)=0 (1≤i≤n+1) C(i, i)=pi (1≤i≤n)
式1 式2
C(i, j)=min{C(i, k-1)+C(k+1, j)+w(i,j)} (1≤i≤j≤n, i≤k≤j) =min{C(i, k-1)+C(k+1, j)}+w(i,j) (1≤i≤j≤n, i≤k≤j) 式3
A1A2A3A4A5 p = (5, 3, 9, 2, 2, 4)
0 135 84 0 54 0 1 66 36 88 1 2 1 2 3 3 3 3
0
16
0
5×5
4
4
5
5×5
M矩阵
S矩阵
2. 计算m[i,i+2] (i=1, 2, 3): (矩阵链长度为3) m[1][3] = min 1≤k<2 {m[1][1]+m[2][3]+p0p1p3, m[1][2]+m[3][3]+p0p2p3} = min{84, 225} = 84 m[2][4] = min 2≤k<4 {m[2][2]+m[3][4]+p1p2p4, m[2][3]+m[4][4]+p1p3p4} = min{90, 66} = 66 m[3][5] = min 3≤k<5 {m[3][3]+m[4][5]+p2p3p5, m[3][4]+m[5][5]+p2p4p5} = min{88, 90} = 88
1
1 2
3
4
2 2 3
3 3 4 4
5
6 7
4 5 5 5
0
0.06
5 5 5 6
0
二维表C
二维表R
4 C (1,0) C ( 2,4) p s 0 0.71 0.64 1.35 k 1 s 1 4 k 2 C (1,1) C ( 3,4) p s 0.24 0.31 0.64 1.19 s 1 C (1,4) m in 1.37 4 k 3 C (1,2) C (4,4) p s 0.6 0.13 0.64 1.37 s 1 4 k 4 C (1,3) C (5,4) p s 0.84 0 0.64 1.48 s 1
s
0
1
1
0.24
2
3
4
5
6
1 2
0
1
2
3
4
5
6
0
2 3 4
5 6 7
0
0.6 0.84 0.18 0.36 0.71 0 0.09 0.31 0.83 0 0.13 0.56 0.68 0 0.3 0.42
1
1 2
3
4
2 2 3
3 4 4
5
6 7
5 5 5
0
0.06
5 5 6
0
二维表C
二维表R
3 C (1,0) C ( 2,3) p s 0 0.36 0.51 0.87 k 1 s 1 3 C (1,3) m in k 2 C (1,1) C ( 3,3) p s 0.24 0.09 0.51 0.84 0.84 s 1 3 k 3 C (1,2) C (4,3) p s 0.6 0 0.51 1.11 s 1
二维表C
p
s3 4
s3 5 s4 5
0 0.13 0.22 0.35 0.31 p s 0.09 0 0.22 0.31
s
0
二维表R
k 4 : C ( 4, 3 ) C ( 5 , 5 ) C (4,5) m in k 5 : C ( 4, 4 ) C ( 6 , 5 ) k 5 : C ( 5, 4 ) C ( 6 , 6 ) C (5,6) m in k 6 : C ( 5, 5 ) C ( 7 , 6 )
课后练习
• 练习1:已知一组连乘矩阵A1A2A3A4A5的行列 数如下面p向量所示:
1. 如使用函数直接递归调用(穷举法)的形式 求解,则是无效算法,请画出函数递归调用 的递归树树形,并说明有哪些子问题被重复 计算。 2. 请用动态规划法求解最优计算顺序,写出计 算过程以及加括号的计算顺序表达式。p = (5, 3, 9, 2, 2, 4)
式1 式2
C(i, j)=min{C(i, k-1)+C(k+1, j)+w(i,j)} (1≤i≤j≤n, i≤k≤j) =min{C(i, k-1)+C(k+1, j)}+w(i,j) (1≤i≤j≤n, i≤k≤j) 式3
0 1 0.24 2 3 4 5 6 1 2 0.09 3 0.13 4 0.3 5 0.06 6 7 0 1 2 3 4 5 6
=min{C(i, k-1)+C(k+1, j)}+w(i,j) (1≤i≤j≤n, i≤k≤j) 式3
0
1
1
0.24
2
3
4
5
6 1
0
1
2
3
4
5
6
0
1 2 3 4 5 6
2 3
4 5
0
0.18
2 0.09
0
3
0.13 4 0.3 5 0.06
0
0
6
7
0
6
7
0
二维表C