PMSM DTC控制系统中定子磁链观测器的研究
直接转矩控制中一种改进的定子磁链观测方法的研究
的问题 , 而且 不能 摆脱 in 型 固有 的 缺陷 。为 此 , -模
本 文 在 电压模 型 的基 础 上 , 采用 一 阶低 通 滤波 器 来
’ J e m
( 3 )
( 一j  ̄ r) o
十
() 6
由于 这 个 原 因 , 只有 当系 统 运 行 在 中 、 高速 区
时 .测 量 误 差 及 积 分漂 移 的影 响 才 变 得 微 不 足道
令 = l , = l ’ 式( 与 } I , 6 式 将 )
进行 了补 偿l 1 由式 ( ) 得定 子 磁链 的 频域 表达 2。 _ ] 1可
’
图2 定 子 磁 链 的 实 际值 与 估 计 值 的 关 系
一 有 詈测 :
所 以
+=+ 一=+ 一) =+’ ( [ +’) ( ’‘‘ ) ( ’( ] 三 詈 一 一 c c( ) =( ) 。’ :s’ 一 s ’ s一 。 争 i ( [ n
6 2
电
源
学
报
总第 4 2期
系统 的转 矩 波形 , 图 中可 以看 出 . 从 电机 均 以最 大
磁链 观 测器 的 系统 在保 持原 有 系统 优 点 的同 时 。 能 有 效地 减小 传 统 直 接 转 矩 控制 系统 中 的磁 链 和 转 矩脉 动 , 善 了系统 的性能 。 改
替代 纯 积 分环 节 。 以消 除积 分环 节对 直 流 量 的累 积 作用 , 同时对 采 用低 通滤 波 器 带来 的 幅值 和相 位 滞 后进 行 了补偿 。 过与传 统 u j 型 的对 比分析 , 通 —模 仿 真结果表明 , 当系 统 运 行 在 低速 区 内 时 , 方 法 能 该 够实 现 定 子磁 链 的准 确观 测 . 同时减 小 磁链 和 转 矩
基于DTC-SVM的PMSM无速度传感器控制的研究的开题报告

基于DTC-SVM的PMSM无速度传感器控制的研究的开题报告一、研究背景和意义随着科技的不断发展,永磁同步电机(PMSM)在工业领域中被广泛应用,其结构简单、效率高、体积小等优点受到了工程师的青睐。
在PMSM的控制领域里,传统的控制方式需要使用速度传感器,但是传感器往往容易出现故障,或者增加系统的成本,因此无速度传感器控制已成为了一个研究热点。
目前,无速度传感器控制主要分为两类:一类是由于直接或间接获得了转子位置或转速信息,而实现控制;另一类利用机电特性,向电机注入高频信号,通过测量电机的电特性,获得电机的旋转角位置,从而实现对电机的控制。
无速度传感器控制可以降低电机的成本,并提高电机的可靠性,因此在工业中得到了广泛的应用。
本文将研究基于DTC-SVM(直接转矩控制-支持向量机)的PMSM无速度传感器控制方法,通过分析电机转子位置信息的采集方式,利用基于模型的预测控制方法来提高PMSM的控制性能。
二、研究内容和方法1.分析PMSM的结构、数学模型和状态转移方程;2.分析PMSM无速度传感器控制方法的现状和存在问题;3.提取PMSM的转子位置信息,通过机电特性测量电机相电压,构建DTC-SVM模型;4.基于DTC-SVM模型,采用模型预测控制方法对PMSM进行无速度传感器控制;5.通过仿真实验和实际验证,对所提出的控制方案进行验证和评估。
三、预期研究结果通过基于DTC-SVM的PMSM无速度传感器控制方法,能有效地实现电机的控制,降低电机的成本,并提高电机的可靠性,同时能够提高电机的转矩响应和动态性能。
四、研究意义该研究结果有助于提高工业生产效率,降低电机的成本,提高电机的可靠性,同时为无速度传感器控制领域的发展提供新的思路和方法。
基于电压电流混合模型的新型磁链观测器

基于电压电流混合模型的新型磁链观测器时维国; 桑尧尧【期刊名称】《《电机与控制应用》》【年(卷),期】2019(046)007【总页数】6页(P14-19)【关键词】永磁同步电机; 磁链观测器; 混合模型; 直接转矩控制【作者】时维国; 桑尧尧【作者单位】大连交通大学电气信息工程学院辽宁大连116028【正文语种】中文【中图分类】TM3510 引言永磁同步电机(PMSM)具有多变量非线性强耦合等特点。
为了应用于生活中,需要更加快速且稳定地控制电机。
直接转矩控制(DTC)是利用逆变器输出电压矢量直接控制电机定子磁链和电磁转矩的控制方法。
在DTC中,直接控制定子磁链和电磁转矩,定子磁链和电磁转矩的估计精度影响整个控制系统的性能;同时,电磁转矩的计算需要PMSM定子磁链,即PMSM电磁转矩的控制精度取决于对电机定子磁链观测的准确度[1-2]。
因此,对定子磁链的观测是直接转矩系统中非常重要的一环。
文献[3]采用低通滤波器来代替传统电压模型观测方法,导致了观测定子磁链的幅值和相位出现误差。
文献[4]提出对定子磁链进行限幅,然后加入高通滤波器来对磁链幅值进行补偿,但无法解决相位偏移问题。
文献[5]采用新型纯积分方法在线辨识磁链,方法简单,易于实现,但在低速区性能较差。
文献[6]提出采用锁相环的改进电压模型磁链观测器,基本上解决了直流偏置和积分初始值偏差问题,但在低速阶段,电机定子电动势受电阻压降影响大,测量误差较大,改进电压模型不能准确测量定子磁链。
基于精确的电机数学模型、采用降阶状态观测器取代传统电压模型观测定子磁链[7],或用于异步电机的基于扩展卡尔曼滤波的定子磁链观测器观测定子磁链[8],或采用模型参考自适应方法辨识定子磁链[9],均取得了较好的观测效果,但是上述方法中的观测器结构复杂。
文献[10]引入一阶低通滤波器与一阶高通滤波器的串联结构,来消除电压模型磁链观测器的直流偏置和积分初值设置问题,并通过补偿环节补偿滤波器引入的幅值和相位误差。
定子磁链自校正PMSM无位置传感器控制新方法

定子磁链自校正PMSM无位置传感器控制新方法徐欣【摘要】电机在电力传动控制系统中扮演关键角色,尤其是具有体积小、重量轻、效率高等优势的永磁同步电机(PMSM),更是获得工业界追捧.为提高永磁同步电动机无位置传感器控制的性能,提出了一种基于定子磁链自校正的无位置传感器控制新方法.首先对传统观测器的模型进行理论分析,针对传统方案的不足,利用定子磁链的自校正构建出新的观测器.通过在一台功率1.5 kW的电机上进行仿真与实验,对所提新方法的可行性及有效性进行了验证.【期刊名称】《电气传动》【年(卷),期】2018(048)012【总页数】4页(P3-6)【关键词】永磁同步电动机;定子磁链自校正;无位置传感器控制【作者】徐欣【作者单位】重庆电子工程职业学院物联网学院,重庆 401331【正文语种】中文【中图分类】TM351随着社会发展,能源需求和生态矛盾日益突出,能源的有效利用备受瞩目。
能源物联网对于能源的合理有效利用起到至关重要作用,电机是能源物联网的重要组成部分,因此,电机的优化控制对于能源物联网整体效能的提升十分关键。
在工业界多种电机中,永磁同步电动机(PMSM)具有体积小、重量轻、效率高等特点,在工业控制领域倍受青睐。
为了减少系统的成本,增加控制的可靠性,永磁同步电动机的无位置传感器技术具有重要的研究意义。
近年来,国内外学者和专家对PMSM无位置传感器控制技术进行了深入的研究[1-8]。
目前,主要的研究方法有以下几种:反电动势法、观测器法、电感法、高频信号注入法。
文献[1]通过d-q坐标系和α-β坐标系下转子位置角与定子磁链之间的关系,建立起电机转子位置角观测模型并利用磁链数学模型间接计算得到电机的转速信息,利用Matlab/Simulink建立控制系统模型,通过仿真验证了该方法的正确性。
该文献中,控制对象为隐极式永磁同步电机。
对于凸极式永磁同步电机,由于Ld和Lq不等,该方法并不能完全适用。
为克服反电动势法在低速时转子位置角观测不准确问题,文献[3]利用逆变器的参考电压和电机的定子电流建立了一种基于微分代数的新型位置观测法,利用该方法可实现电机全速范围的无位置传感器控制。
永磁同步电机控制策略研究及仿真

永磁同步电机控制策略研究及仿真一、本文概述永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度、良好的控制性能等特点,在工业、交通、家电等领域得到了广泛应用。
随着电力电子技术和控制理论的发展,对PMSM的控制策略的研究也日益深入,旨在实现电机的高性能、高效率和可靠性。
本文主要针对永磁同步电机的控制策略进行研究和仿真分析。
本文首先对永磁同步电机的基本原理和控制方法进行了综述,包括电机结构、运行原理、数学模型等,为后续控制策略的研究奠定了基础。
详细讨论了几种常见的PMSM控制策略,如矢量控制(Vector Control)、直接转矩控制(Direct Torque Control, DTC)、模型预测控制(Model Predictive Control, MPC)等,分析了各种控制策略的优缺点及其适用场合。
接着,本文针对某特定应用背景,提出了一种改进的PMSM控制策略。
该策略在传统控制方法的基础上,引入了先进的控制算法和优化技术,旨在提高系统的动态性能、稳态性能和抗干扰能力。
本文还通过仿真实验,验证了所提控制策略的有效性和优越性。
二、永磁同步电机基本原理与特点永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永磁体作为磁场源,实现电能与机械能相互转换的装置。
其基本原理基于电磁感应和磁场相互作用,通过控制定子电流产生的磁场与转子永磁体磁场之间的相互作用,实现电机的旋转运动。
高效率:由于使用永磁体作为磁场源,无需额外的励磁电流,因此电机在运行时具有较低的损耗和较高的效率。
高功率密度:永磁体的使用使得电机能够在较小的体积内实现较高的功率输出,适用于需要紧凑设计的应用场景。
良好的调速性能:通过控制定子电流的频率和相位,可以实现对PMSM的精确速度控制,满足宽范围调速的需求。
低维护成本:永磁体通常具有较高的磁能积和稳定性,使得电机在运行过程中无需频繁更换磁极,降低了维护成本。
直接转矩控制论文:基于神经网络的电机磁链观测器的研究

直接转矩控制论文:基于神经网络的电机磁链观测器的研究【中文摘要】在实际电机直接转矩控制系统中定子磁链值是无法直接采样获得的,必须通过间接方法估算得到,即先采样定子电压、电流、转速等容易测量的量,再通过间接方法计算出定子磁链的幅值和相位。
直接转矩控制技术中的另一关键量电磁转矩也与定子磁链有关。
因此定子磁链能否准确获得直接关系到直接转矩控制系统高性能的转矩动态响应的实现。
本文应用神经网络理论,对异步电机定子磁链观测方法进行了研究,主要研究工作如下:本文先介绍了传统直接转矩控制中的三种磁链观测方法,并分析了这些方法的优缺点,其中详细分析了u-i模型中使用的纯积分环节还会带来直流偏移和初始值误差的问题。
接着介绍了其它学者针对u-i磁链观测模型提出的一些改进方法,这其中包括一阶低通滤波器法、幅值限定的定子磁链观测法、带幅值和相位补偿的定子磁链观测法、自适应积分器法,并分析了这些方法的优缺点,接着介绍了这些方法中涉及到的截止频率的选择方法。
在学者们研究的这些方法中,带幅值和相位补偿的定子磁链观测器,结构简单,容易实现,只需选择合适的截止频率即可使磁链观测器具有较好的直流偏移抑制能力,但是它的自适应能力差,当定子电信号频率变化和负载变化时,定子磁链观测器由于截止频率固定使之很难观测出准确的磁链值。
针对带幅值和相位补偿的定子磁链观测器的不足,本文提出了一种RBF神经网络定子磁链观测器法,即采用RBF神经网络重构基于电压模型的带幅值和相位补偿的变截止频率定子磁链观测器的方法。
最后对本文提出的方法进行了测试实验,从测试结果来看,训练好的RBF神经网络可以很好地实现带幅值和相位补偿的变截止频率观测器的功能,不仅如此,它的意义更是在于:对应两个离散截止频率点之间的频率区间,RBF神经网络磁链观测器利用神经网络的泛化能力和自适应能力,提高了磁链的观测精度。
测试结果与理论分析一致,证明了本文提出方法的有效性。
【英文摘要】In fact, the amplitude and phase of stator flux can not be obtaining by sampling directly, it usually be calculated indirectly by sampling the factors easily be obtained such as stator voltage, current and speed. Torque is the key quantity of DTC, and it is relate to the stator flux. So, accurate stator flux obtaining is the key factor to achieve good dynamic performance of torque response in DTC system.An observing method of motor stator flux based on neural network theory is studied in this paper. The main work is as follows:Three flux observers of conventional DTC is described in this paper at first, and then analyses the merits and demerits of these methods, especially detailed analyze the reason of the DC offset and initial phase issue bring by the pure integrator of the voltage-based method. Then introduce some modified methods of the pure integrator proposed by the other scholars, including the first-order low-pass filter,amplitude limited method, amplitude and phase compensation method, adaptive integrator method, and analyze the advantages and disadvantages of them, beside, introduce the selection of the cut-off frequency. Among those methods, stator flux with amplitude and phase compensation is easy to implement, it can make a good DC offset suppression if select a appropriate cut-off frequency. But, its adaptive ability is bad; it’s difficult to observe an accurate flux when the stator frequency and load change because of the fix cut-off frequency.To resolve the shortage of the stator flux observer with amplitude and phase compensation, a RBF neural network flux observer is proposed in this paper. At last, an experiment to test the method proposed in this paper, the results show that, the trained RBF neural network can achieve the function well of variable cut-off flux observer with amplitude and phase compensation. Not only that, the point is RBF neural network with great generalization and adaptive ability improves the accuracy of flux observation in the region of two discrete cut-off frequecy. Consistent with the theoretical analysis, the test results demonstrate the validity of the method proposed in this paper.【关键词】直接转矩控制定子磁链观测器截止频率 RBF神经网络【英文关键词】Direct torque control Stator flux observer Cutoff frequency RBF neural network 【目录】基于神经网络的电机磁链观测器的研究摘要4-5Abstract5第一章绪论8-13 1.1 交流电动机调速技术的发展和现状8-9 1.2 直接转矩控制技术概况9-10 1.2.1 直接转矩控制技术的产生与特点9 1.2.2 直接转矩控制技术的研究现状9-10 1.3 定子磁链观测的意义及研究现状10-12 1.4 论文的主要内容和工作12 1.5 本章小结12-13第二章异步电动机直接转矩控制的基本原理13-22 2.1 异步电动机的空间矢量概念13-14 2.2 坐标变换14 2.3 异步电动机的动态数学模型14-16 2.4 电压型逆变器的开关状态及输出电压空间矢量16-17 2.5 圆形磁链轨迹直接转矩控制基本原理17-21 2.5.1 磁链调节18-19 2.5.2 转矩调节19 2.5.3 扇区判断19-20 2.5.4 最优开关矢量表20-21 2.6 本章小结21-22第三章定子磁链观测方法的研究22-33 3.1 定子磁链观测模型22-26 3.1.1 u-i 模型22-24 3.1.2 i-n 模型24-26 3.1.3 u-n 模型26 3.2 改进的定子磁链观测方法26-32 3.2.1 一阶低通滤波器观测方法27-28 3.2.2 幅值限定的定子磁链观测器28-29 3.2.3 带幅值和相位补偿的定子磁链观测器29-30 3.2.4 自适应积分器30-31 3.2.5 截止频率ω_c 的选择31-32 3.3 本章小结32-33第四章定子磁链观测方法的仿真研究33-44 4.1 MATLAB/SIMULINK 简介33 4.2 圆形磁链轨迹DTC 系统仿真研究33-39 4.3 改进的定子磁链观测方法的仿真研究39-41 4.3.1 基于幅值限定的定子磁链观测器的仿真39-40 4.3.2 带幅值和相位补偿的定子磁链观测器的仿真40-41 4.4 定子磁链观测方法对直流偏移量处理的仿真研究41-43 4.5 本章小结43-44第五章 RBF 神经网络定子磁链观测方法研究44-63 5.1 RBF 神经网络的结构44-46 5.2 RBF 神经网络的学习过程46 5.3 RBF 神经网络定子磁链观测器设计46-59 5.3.1 数据采集实验47-50 5.3.2 数据处理50-55 5.3.3 神经网络的训练55-59 5.4 测试结果及其分析59-62 5.5 本章小结62-63总结与展望63-65一、总结63二、展望63-65参考文献65-68致谢68-69附录A (攻读学位期间发表论文目录)69-70附录B (硬件实物照片)70。
异步电机定子磁链定向矢量控制系统的设计与研究的开题报告

异步电机定子磁链定向矢量控制系统的设计与研究的开题报告一、选题背景及意义随着电力电子技术的快速发展,异步电机磁链定向矢量控制技术也日趋成熟,已成为现代工业中普遍采用的控制方式。
在电力驱动系统中,异步电机具有结构简单、制造成本低、运行可靠等优点,在机床、风力发电、轨道交通等领域的应用越来越广泛。
磁链定向矢量控制技术是通过对异步电机定子和转子电流的控制,实现电机高效、高精度的转矩控制和速度调节。
电机控制系统设计的好坏,直接决定了电机的效率、动态性能和稳定性能。
因此,对异步电机定子磁链定向矢量控制系统的设计与研究,具有重要的理论和实际意义。
二、选题内容和研究方法本课题旨在研究异步电机定子磁链定向矢量控制系统的设计与优化,主要包括以下内容:(1)基于Matlab/Simulink平台,建立异步电机磁链定向矢量控制系统的仿真模型,分析系统的动态性能和稳态性能。
(2)通过分析电机运行特性、控制要求和控制器结构,设计异步电机磁链定向矢量控制系统的控制器。
(3)基于DSP技术,实现异步电机磁链定向矢量控制系统的硬件控制器设计,完成控制算法的编写和调试。
(4)在实验室进行实验验证,测试系统的控制性能,比较实验结果与仿真模型结果,分析系统的优化空间和改进方向。
研究方法主要包括理论分析、仿真模拟和实验验证。
三、预期结果和创新性本课题的预期结果是成功设计出异步电机定子磁链定向矢量控制系统,并通过实验验证系统的性能优异,系统稳定可靠,具有一定的创新性。
同时,本课题还具有以下的创新性:(1)采用DSP技术和Matlab/Simulink平台相结合的方法,提高了研究的效率和准确性。
(2)提出了一种新的控制器结构,通过优化控制算法,控制器具有更好的控制精度和抗扰性能。
(3)探索了异步电机磁链定向矢量控制系统在工业应用中的实际情况和应用效果,为异步电机的磁链定向矢量控制系统研究提供了新的思路和方法。
四、研究目标和任务本课题的研究目标是设计一种高效、高精度、高稳定性的异步电机定子磁链定向矢量控制系统,并通过实验验证其性能优异。
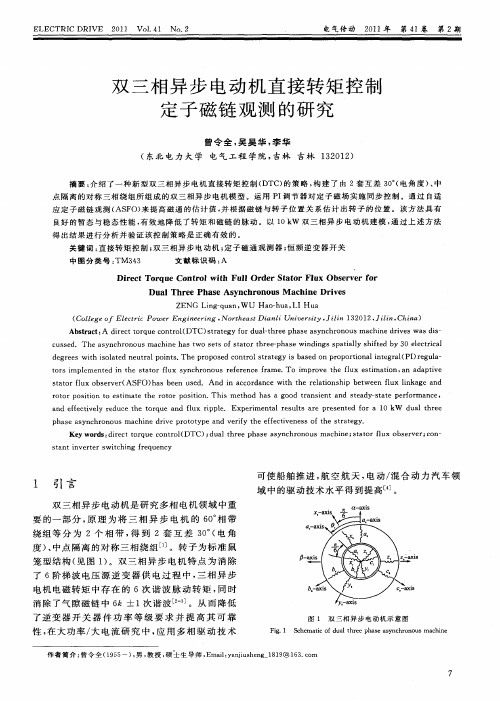
双三相异步电动机直接转矩控制定子磁链观测的研究
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-5-
0.18 0.16 0.14 0.12
0.1 0.068 0.07 0.072 0.074 0.076 0.078
-2-
由于电机的机电时间常数远大于电磁时间常数,使得定子磁链瞬时转速变得比转子磁链 转速大,造成定转子磁链之间夹角瞬时增加,转矩迅速增大,反之亦然。这说明了磁链运行 状态是时进时退的,这样在磁链基波信号上必然会叠加上高频信号。另外,直接转矩控制中 反电势是通过定子绕组外加电压减去电阻压降求得的,定子绕组外加电压为六个电压矢量组 成的跳变信号,而电机中由于电感的作用电流为连续值,所以它们的差反电势为非连续的跳 变信号。
当由于直流偏移量的作用而使 γ 角大于 90°时, ∆e 为负,磁链补偿值就会减小,相应
的磁链矢量ϕ 的值就会减小并向逆时针旋转,直到重新与反电势正交。当 γ 角小于 90°时分
析方法相似。因此自适应积分器可以自动调整补偿磁链的幅值来达到消除直流偏移量的目 的。
-3-
β emf α
γ
ϕ2 ϕ2'
γ
( ) T
=
3 2
pn
ϕdiq − ϕqid
(3)
利用坐标变化理论把上述转矩方程变换到定子同步旋转坐标系轴下的转矩方程为:
( ) ( ) T
=
3 2
pn
⎡⎣ϕd
idc sin δ + iqc cosδ
−ϕq
idc cosδ − iqc sin δ
⎤⎦
=
3 2
pn
⎡ ⎢⎢⎣idc
ϕdϕq ϕs
+ iqc
电阻的变化值 ∆R ,定子电阻实际 R 减去定子电阻变化值 ∆R 后即得到补偿后的定子电阻。
I* I
1 1+τis
∆R
Rest
R
图 4 定子电阻补偿器 Fig.4 stator resistance estimator
根据永磁同步电机在 dq 坐标系中的数学模型,可以通过电机转矩和磁链的给定值计算 出其所对应的电流值给定值。永磁同步电机的转矩和磁链的给定值可以表示为:
ϕ
2 d
ϕs
−
iqc
ϕdϕq ϕs
+ iqc
ϕq2 ϕs
⎤ ⎥ ⎥⎦
=
3 2
pn
ϕs
c
(4)
上式表明永磁同步电机电磁转矩在定子磁链幅值不变的情况下正比于 q 轴定子电流。
对于表贴式磁钢永磁同步电机 Ld=Lq=Ls,磁链在定子同步旋转坐标系下可以写为:
⎡ϕdc ⎤
⎢⎣ϕqc
⎥ ⎦
=
⎡ Ls
⎢ ⎣
空间矢量来控制磁链的幅值、运动的速度与方向,在保证定子磁链的幅值恒定的同时调节功
率角来完成对电磁转矩的直接控制。电压矢量的选择必须综合考虑由滞环比较器给出的当前
磁链幅值与转矩的要求。传统的直接转矩系统框图如图:
T*
eT
ψs *
eψ
αβ
ψs
Is
ψs
Vs
θr
图 1 直接转矩系统框图 Fig1 Structure of DTC system
2.永磁同步电机直接转矩控制原理
永磁同步电机在 d、q 轴下的数学模型为:
⎧⎪ϕd = Ldid + ϕ f ⎨⎪⎩ϕq = Lqiq
(1)
⎧⎪Ud = Rsid + pϕd − ωrϕq ⎨⎪⎩Uq = Rsiq + pϕq + ωrϕd
(2)
-1-
Te∗
=
3 pn 2
ϕf
iq
(11)
ϕ ∗ = (Ldid + ϕ f )2 + L2qiq2
(12)
I ∗ = id2 + iq2
(13)
通过求解上述三式可以得到对应于不同的转矩和磁链给定值时的电流给定值。这种计算
电流给定值的方法中不含有与定子电阻有关的项,所以可以用来估算定子电阻的变化量并进
-4-
器,以此来保证 γ 角不变。
上述方法在低速时容易受定子电阻误差的影响,为了提高该模型在低速情况下的运行性 能,引入了定子电阻补偿器[7]。原理图如图 4 所示。
当定子电阻增大时,实际的定子电流值就会变小,此时给定电流 I ∗ 与实际电流 I 之间
的差值为正,将这个差值经过低通滤波器后输入到 PI 调节器中,PI 调节器的输出即为定子
行补偿;该方法中虽然会用到电流在 dq 坐标系中的分量 id 、 iq ,但是它们只是计算时的中
间量,在最后的结果中可以消除这两项,所以这种方法实际上并不需要电机转子的位置来进 行坐标变换,这也正适合于直接转矩控制。
4.仿真与实验结果分析
本文采用 Matlab/Simulink 仿真与基于 TI 公司 TMS320F2812DSP 实验系统进行综合验 证,仿真框图如图 5 所示。图中磁链给定值为 0.183Wb。
iβ
R
uβ
emfβ
ϕβ 2
1
ϕ s + ωc
β1
++
ωc s + ωc
ϕα iemfα + ϕβ iemfβ
ϕα
ϕcmp
φ
÷
θ
ϕβ
图 2 自适应积分器原理图 Fig.2 Structure of modified adaptive integrator
∆e = emfα ⋅ϕα + emfβ ⋅ϕβ ϕ
200 Speed Ref
0.1833 PI
flux torque s ector estimated _model 1
f
f1
flux
t
t1
torque
Subsystem2
s ector
pwm
A COM
B
C
IGBT 1
PWM switch_model 1
From Ta Tb Tc
I_ab V_abc
0
0 ⎤ ⎡idc ⎤
Ls
⎥ ⎦
⎢⎣iqc
⎥ ⎦
+ϕf
⎡cos δ ⎢⎣− sin δ
⎤ ⎥ ⎦
(5)
若同步旋转坐标系中定子磁链ϕ f 定向于 dc 轴,即ϕqc = 0 ,代入上式得:
iqc
=
i Ls
ϕf
sin δ
(6)
因此表贴式永磁同步电机转矩可以表示为:
T
=3 1 2 Ls
p ϕs
ϕf
sin δ
(7)
由上式可以看出,定转子磁链不变的情况下转矩正比于功率角的正弦值。
根据电机统一理论,交流电机定子磁链在两相定子坐标系中可表示为:
∫ ϕs = (us − Ris ) dt
(8)
若忽略定子电阻,定子磁链可直接用电压空间矢量的积分表示:
∫ ϕs = usdt
(9)
此式说明磁链矢量的运动方向与给定电压矢量的方向一致,因此可通过选择合适的电压
Mta Mtb
V _Com
Mtc
Measures
Step 2
Vabc Goto 5
dq _I_transform
I_a
I_ab
Step
I_b
Goto iab Goto 4 quency
Tm
A m
B
C Permanent Magnet Synchronous Machine
wm output
theta
正是由于直接转矩控制的这些特性,并不是每种定子磁链观测方法都能够适用。 B.K.Bose 在文献[4]中提出过一种串联低通滤波器代替纯积分器来估算定子磁链的方法[5]。 这种方法就不适用于直接转矩控制中。因为串联一阶低通滤波器会把磁链中的高频信号滤 掉,这样系统无法对磁链的变化作出快速响应。从另一个方面讲,加入串联低通滤波也就相 应加大了时间常数,磁链的反映速度变慢,磁链圆变差,系统特性也就相应变差。
参数值
额定功率( W )
1200
额定转矩( N ⋅ m )
8
额定转速( rpm )
2000
定子电阻 R ( Ω ) s
定子电感 L ( H ) s
永磁体磁链ψ ( Wb ) 极对数 p
0.9585 0.00525 0.1827
4
转动惯量( kg ⋅ m2 )
0.000633
图 6 给出的是应用串联低通滤波器的系统仿真波形,仿真过程为电机启动阶段采用纯积 分器,当 t=0.1s 时切换到串联一阶低通滤波器。图 6(a)(b)分别为 t=0.0068s~0.0078s 反电势 经纯积分器和一阶串联低通滤波器后的磁链波形,从图 6(a)中可以看出直接转矩控制系统中 磁链波形为时进时退运行的含有高频成分,而反电势经过串联一阶低通滤波器后(图 6(b)), 观测出非常平滑的磁链波形。图 8(c)为观测出的磁链波形,在 0.1s 前观测出的磁链值能很好 的响应给定值,但当 0.1s 后磁链由于明显的响应滞后而出现了较大波动。
PMSM DTC 控制系统中定子磁链观测器的研究
李钊,杨贵杰,李铁才,徐振刚
哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨 (150001)
E-mail:stephenlz@
摘 要:针对直接转矩控制系统定子磁链观测器中积分环节对直流偏移量的积累误差问题, 以及在低速情况下观测结果受定子电阻变化影响较大的问题,提出了一种新型的基于改进型 积分器法并对定子电阻进行补偿的定子磁链观测器,该方法结构简单,易于工程实现。 Matlab/Simulink 仿真和实验表明,采用此方法的直接转矩系统能够在较宽的速度内运行,对 直流偏移量有很好的抑制效果,并且对定子电阻的变化具有较强的鲁棒性。 关键词:直接转矩控制;定子磁链观测;改进型积分器;定子电阻补偿 中图分类号:TM351