进给伺服系统-精品
FANUCαi系列进给伺服驱动系统典型故障诊断与维修

第 8卷 第 2期
20 0 8年 6月
南 京 工 业 职 业 技 术 学 院 学 报
Junl f aj gIst eo I ut eh ooy ora o N ni ntu f n syT c nl n it d r g
的任务就是要完 成各 坐标轴 运 动的 位置控 制 及速 度控 制。 数控 机 床 进 给 伺 服 系统 的组 成 框 图 如 图 l 示 , 是 一 个 双 所 它 闭 环 系统 , 环是 速 度 环 , 环 是 位 置环 。 内 外
础 上 作 了性 能 改 进 。 产 品通 过 特 殊 的磁 路 设 计 与 精 密 的 电
伺 服 系统 是 数 控 机 床 的 主要 部 分 , 一 台数 控 机 床 中一 在 般 有 多 套 。 由于 它 和 机 械部 分 有 联 接 , 以 出现 故 障 的 机 会 所
1 F UC o AN q系列进 给 伺 服 驱 动装 置 的控 制 原 理 与 连接
1 1 控 制原 理 .
制 系统 。 1 2 F U q系 列进 给 伺 服驱 动 装 置 的 连接 . AN C o 系 列 伺 服 模 块 连 接 图 如 图 2所 示 。x 轴 模 块 上 P N 、
到位置控制指令 , 同时 , 置检测装 置将实 际位 置检测信 号 位
反馈 给数 控 系 统 , 成 全 闭环 或 半 闭 环 的 位 置 控 制 。经 位 置 构 比较后 , 数控 系 统 输 出 速 度 控 制 指 令 至 各 坐 标 轴 的 驱 动 装 置 , 速 度控 制 单 元 驱 动 伺 服 电 动 机 , 动 滚 珠 丝 杠 传 动 进 经 带 行 进 给运 动 , 成 位 置 环 控制 。伺 服 电 动 机 上 的 测 速 装 置 将 完 电 动机 转 速 信 号 与速 度 控 制 指 令 比较 , 成 速 度 环 控 制 。 因 构
位置增益对伺服进给系统定位精度影响的试验研究

Absr c :By t e ts ,t i a e n ls d t e p sto a n o h c i e to e v y t m o told b h ta t h e t h sp p ra ay e h o iin g i ft e NC ma h n o ls r o s se c nr le y t e
¥ 佳 木 斯大 学 项 目 , 目 号:2 0 —18 项 L 0 9 1
・
6 ・ 2
;:
‘u U I
值 AU通过速 度控 制器 乘 以增 益 常数 , 到 伺 服 电 得
动机 的 电枢 电 压 , 它控 制 电动机 旋 转 速度 。 指令 位
置 与 实 际 位 置 D 相 等 时 , 即位 置 偏 差 值 A 为 0 D 时 , 与 均为 0 系统 停 止 工作 , , 执行 部 件 到 达指 令 所要求 的位置 。所 以整 个 系统 在 偏 差 不为 0时 , 终 始
p o e so g r c s fhih—s e n ih-p e iin. pe d a d hg r cso K e wo d y r s:Po iin Ga n;S r o S se ;P sto n c r c st i o e v y tm o i nig Ac u a y i
图 1进给伺服 系统 的控制结构 图
2 位 置增 益 对 伺 服 进 给 系 统 定 位 精 度 影 晌 的 试 验
第4章 数控机床伺服系统
第4章 数控机床伺服系统
第4章 数控机床伺服系统 工作原理:假设是单三拍通电工作方式。 (1)A 相通电时,定子A 相的五个小齿和转子对 齐。此时,B 相和 A 相空间差120,含 1 120/9 = 13 齿 3 2 A 相和 C 相差240,含240/ 9 = 26 个 3 齿。所以,A 相的转子、定子的五个小齿对 齐时,B 相、C 相不能对齐,B相的转子、 定子相差 1/3 个齿(3),C相的转子、定 子相差2/3个齿(6)。
mz2 k
式中:n —转速(r/min); f —控制脉冲频率,即每秒输入步进电动机的脉冲数; 由上式可知:工作台移动的速度由指令脉冲的频率所控制。
第4章 数控机床伺服系统 特点:
(1)来一个脉冲,转一个步距角。
(2)控制脉冲频率,可控制电机转速。
(3)改变脉冲顺序,改变方向。
种类:
有励磁式和反应式两种。两种的区别在于励磁式步进电机的转 子上有励磁线圈,反应式步进电机的转子上没有励磁线圈。
第4章 数控机床伺服系统
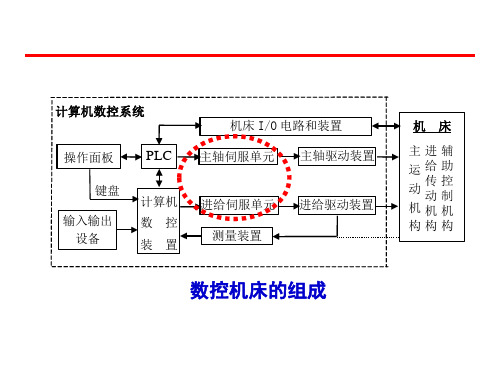
计算机数控系统 机床 I/O 电路和装置 操作面板 键盘 输入输出 设备 机 床
PLC
计算机 数 装 控 置
主轴伺服单元
主轴驱动装置
进给伺服单元 测量装置
进给驱动装置
主进辅 运给助 传控 动 动制 机机机 构构构
数控机床的组成
第4章 数控机床伺服系统
第4章
数控机床伺服系统
第4章 数控机床伺服系统
360o s mz2 k
第4章 数控机床伺服系统
每个步距角对应工作台一个位移值,这个位移值称为脉 冲当量。 因此,只要控制指令脉冲的数量即可控制工作台移动的 位移量。步距角越小,它所达到的位置精度越高,因此实际 使用的步进电动机一般都有较小的步距角。 步进电动机的转速公式为:n 60 f
数控机床的伺服系统

第6章 数控机床的伺服系统
伺服驱动装置
位置控制模块 速度控制单元
工作台 位置检测
速度环 速度检测 位置环
伺服电机
测量反馈
图6-1 闭环进给伺服系统结构
数控机床闭环进给系统的一般结构如图,这是一个双闭环系统,内 环为速度环,外环为位置环。速度环由速度控制单元、速度检测装置等构成。 速度控制单元是一个独立的单元部件,它是用来控制电机转速的,是速度控 制系统的核心。速度检测装置有测速发电机、脉冲编码器等。位置环是由 CNC装置中的位置控制模块、速度控制单元、位置检测及反馈控制等部分组 成。
第6章 数控机床的伺服系统
A C1 B4 2 B 3C A
逆时针转30º
C 4 B
A 1 2 3 A
B
C 1 B
A 2
B 3 C
C
逆时针转30º
4 A
第6章 数控机床的伺服系统
采用三相双三拍控制方式,即通电顺序按AB→BC→CA→AB(逆时针 方向)或AC→CB→BA→AC(顺时针方向)进行,其步距角仍为30。由于 双三拍控制每次有二相绕组通电,而且切换时总保持一相绕组通电,所以 工作比较稳定。
第6章 数控机床的伺服系统
设 A 相首先通电,转子齿与定子 A 、 A′ 对齐(图 3a )。然后在 A 相继续通电的情 况下接通 B 相。这时定子 B 、 B′ 极对转子 齿 2 、 4 产生磁拉力,使转子顺时针方向转 动,但是 A 、 A′ 极继续拉住齿 1 、 3 ,因 此,转子转到两个磁拉力平衡为止。这时转 子的位置如图 3b 所示,即转子从图 (a) 位 置顺时针转过了 15° 。接着 A 相断电, B 相继续通电。这时转子齿 2 、 4 和定子 B 、 B′ 极对齐(图 c ),转子从图 (b) 的位置又 转过了 15° 。其位置如图 3d 所示。这样, 如果按 A→A 、 B→B→B 、 C→C→C 、 A→A… 的顺序轮流通电,则转子便顺时针 方向一步一步地转动,步距角 15° 。电流 换接六次,磁场旋转一周,转子前进了一个 齿距角。如果按 A→A 、 C→C→C 、 B→B→B 、 A→A… 的顺序通电,则电机 转子逆时针方向转动。这种通电方式称为六 拍方式。
伺服系统简介

§5-1 伺服系统的性能要求
大惯量宽调速直流伺服电动机 特点:有良好测速性能, 特点:有良好测速性能,能在较大过载转矩下长时间工作 电动机转子惯量大, 电动机转子惯量大,能与丝杠连接不需中间传动装置 结构复杂,价格较贵 结构复杂, 交流伺服系统: ③ 交流伺服系统: 采用交流异步伺服电动机和永磁同步伺服电动机驱动 采用交流异步伺服电动机和永磁同步伺服电动机驱动 交流异步伺服电动机 交流异步伺服电动机: 交流异步伺服电动机:用于主轴伺服系统 永磁同步伺服电动机: 永磁同步伺服电动机:用于进给伺服系统
第五章 伺服系统简介
§5-1 伺服系统的性能要求
定义:数控机床的伺服系统是指以数控机床移动部件( 定义:数控机床的伺服系统是指以数控机床移动部件(如工作 伺服系统是指以数控机床移动部件 位置和速度作为控制量的自动控制系统 作为控制量的自动控制系统, 台)的位置和速度作为控制量的自动控制系统,也就是 位置随动系统。 位置随动系统。 作用: 作用:是接受来自数控装置中插补器或计算机插补软件 生成的进给脉冲,经变换、 生成的进给脉冲,经变换、放大将其转化为数控 机床移动部件的位移,并保证动作的快速和准确。 机床移动部件的位移,并保证动作的快速和准确。 组成:伺服电路、伺服驱动装置、机械传动部件、 组成:伺服电路、伺服驱动装置、机械传动部件、末端执行件
§5-2 常用伺服系统简介
4、步进式伺服系统的特性 工作台位移量: ① 工作台位移量:进给脉冲的数量决定工作台的位移量 步进电动机的角位移θ 步进电动机的角位移θ,θ=nα(α为步距角) =nα 为步距角) 工作台的位移量L 工作台的位移量L: L=θP/360° L=θP/360°(P为导程) 为导程)
§5-1 伺服系统的性能要求
一、基本要求
数控伺服进给系统中的非线性预测控制

i inmo e a di’ n l e dut n W el e yn ua n t r a dterlo t z incl l i  ̄ o dl S - jsmet a razdb er e k; l p i a o a ua o n t o i a n s i l wo n h o mit c tn
在机 械 传动链 中 的死 区、 隙 、 机 饱 和 、 线 性 摩 擦 间 电 非
力将 会 造 成 工 作 台 的 跟 踪 伺 服 中 产 生 稳 态 误 差 、 行 、 爬 振 荡 等 现 象 ; 切 削 过 程 中 的 非 线 性 切 削 力 会 导 致 切 在 削振 颤 的 发 生 。 然 而 , 于 建 模 的 困 难 和 控 制 精 度 要 由
Absr t tac :Ba e n t n s iain o h o l e rfito a t r ft e d s r o s tm , e n nl a s d o he ive tg to ft e n n i a rc in f c o s o hef e e v ys e Th o i r n ne prditv o to a h e in o h sto o p c n r l rWa o s d. n t e c ntolr t e pr d e c ie c n r lpln i t e d sg ft e po ii n lo o to l s pr po e I h o r l , h o - n e e
NI in h a IS e g E Ja -u ,L h n
( c olo EetclE g er g no t n A h iU i r t o eh o g ,Manhn A h i2 3 0 Sh o f l r a n i e n&Ifr i n u nv s y fT c n l y ci n i ma o e i o a sa n u 4 0 2, C ia hn ) .
伺服系统常见故障与排除
11. 不 能 准 备 好 系 统 , 报 警 显 示 伺 服 VRDY OFF 〔0,16/18/0i为401〕
系统开机自检后,如果没有急停和报警,那么发 出*MCON信号给所有轴伺服单元,伺服单元承受到 该信号后,接通主接触器,电源单元吸合,LED由 两杠〔――〕变为00,将准备好〔电源单元准备 好〕信号,送给伺服单元,伺服单元再接通继电 器,继电器吸合后,将*DRDY信号送回系统,如果 系统在规定时间内没有承受到*DRDY信号,那么发 出此报警,同时断开各轴的*MCON信号,因此,上 述所有通路都是可能的故障点。
8)观察所有伺服单元的LED上是否有其他报警信号, 如果有,那么先排除这些报警
9)如果是双轴伺服单元,那么检查另一轴是否未接 或接触不好或伺服参数封上了〔0系统为8×09#0, 16/18/0i为,s1,s2设定如下: s1-TYPEA,s2-TYPEB
d.伺服放大器的内部过热检测电路故障,更换伺服放 大器或修理
③伺服放大器检测到主回路过热
a.关机一段时间后,再开机,如果没有报警产生, 那么可能机械负载太大,或伺服电机故障,检 修机械或更换伺服电机
b.如果还有报警,检查IPM模块的散热器上的热 保护开关是否断开,更换
c.更换伺服放大器
例如:某直流伺服电机过热报警,可能原因有: ①过负荷。可以通过测量电机电流是否超过额定值 来判断。②电机线圈绝缘不良。可用500V绝缘电阻 表检查电枢线圈与机壳之间的绝缘电阻。如果在 1MΩ以上,表示绝缘正常,否那么应清理换向器外 表的炭刷粉末等。③电机线圈内部短路。可卸下电 机,测电机空载电流,如果此电流与转速成正比变 化,那么可判断为电机线圈内部短路。应清扫换向 器外表,如外表上有油更易引起此故障。④电机磁 铁退磁。可通过快速旋转电机时,测定电机电枢电 压是否正常。如电压低且发热,那么说明电机已退 磁。应重新充磁。⑤制动器失灵。当电机带有制动 器时,如电机过热那么应检查制动器动作是否灵活。 ⑥CNC装置的有关印制线路板不良。
数控机床进给系统设计
第一章、数控机床进给系统概述数控机床伺服系统的一般结构如图图1-1所示:图1-1数控机床进给系统伺服由于各种数控机床所完成的加工任务不同,它们对进给伺服系统的要求也不尽相同,但通常可概括为以下几方面:可逆运行;速度范围宽;具有足够的传动刚度与高的速度稳定性;快速响应并无超调;高精度;低速大转矩。
1、1、伺服系统对伺服电机的要求(1)从最低速到最高速电机都能平稳运转,转矩波动要小,尤其在低速如0、1r /min或更低速时,仍有平稳的速度而无爬行现象。
(2)电机应具有大的较长时间的过载能力,以满足低速大转矩的要求。
一般直流伺服电机要求在数分钟内过载4-6倍而不损坏。
(3)为了满足快速响应的要求,电机应有较小的转动惯量与大的堵转转矩,并具有尽可能小的时间常数与启动电压。
电机应具有耐受4000rad/s2以上的角加速度的能力,才能保证电机可在0、2s以内从静止启动到额定转速。
(4)电机应能随频繁启动、制动与反转。
随着微电子技术、计算机技术与伺服控制技术的发展,数控机床的伺服系统已开始采用高速、高精度的全数字伺服系统。
使伺服控制技术从模拟方式、混合方式走向全数字方式。
由位置、速度与电流构成的三环反馈全部数字化、软件处理数字PID,使用灵活,柔性好。
数字伺服系统采用了许多新的控制技术与改进伺服性能的措施,使控制精度与品质大大提高。
数控车床的进给传动系统一般均采用进给伺服系统。
这也就是数控车床区别于普通车床的一个特殊部分。
1、2、伺服系统的分类数控车床的伺服系统一般由驱动控制单元、驱动元件、机械传动部件、执行件与检测反馈环节等组成。
驱动控制单元与驱动元件组成伺服驱动系统。
机械传动部件与执行元件组成机械传动系统。
检测元件与反馈电路组成检测系统。
进给伺服系统按其控制方式不同可分为开环系统与闭环系统。
闭环控制方式通常就是具有位置反馈的伺服系统。
根据位置检测装置所在位置的不同,闭环系统又分为半闭环系统与全闭环系统。
半闭环系统具有将位置检测装置装在丝杠端头与装在电机轴端两种类型。
伺服电机与伺服控制系统原理全演示文稿
U
脉宽
脉宽
脉宽
脉宽
周期不变 周期不变
平均直流电压
ωt
第38页,共47页。
7.3 直流伺服电机及其速度控制
U
Ia +
U T Ton
主要内容
Ea
t
VD
Ua
M
Ea
Ia
t
-
直流电机电压的平均值:
T—脉冲周期,
t
UaT 1 0TEaTTonEa
控制 回路
电流环:电流调节,作用:系统快速性、稳定性改善。
触发脉冲发生器:产生移相脉冲,使可控硅触发角前移或 后移。
主回路:可控硅整流放大器:整流、放大、驱动,使电机转动。
第33页,共47页。
7.3 直流伺服电机及其速度控制
主回路由大功率晶闸管构成的三相全控桥式反并接可逆电路,分 成二大部分( Ⅰ和 Ⅱ ),每部分内按三相桥式连接,二组反并 接,分别实现正转 和反转。
i ——电枢电流
a
i f ——励磁电流
R a ——电枢电路的电阻
R f ——励磁回路的电阻
L a ——电枢回路的自感系数
L f ——励磁回路的自感系数
——电动机的机械角速度
第16页,共47页。
2. 机械系统的转矩平衡方程
Te
T2
T0
J
d
dt
T e ——电磁转矩 T 2 ——负载转矩
T 0 ——空载损耗转矩
与晶闸管调速系统比较,速度调节器和电流调节
器原理一样。不同的是脉宽调制器和功率放大器。
第41页,共47页。
7.3 直流伺服电机及其速度控制 脉宽调制器
伺服系统
伺服系统2.1 什么是控制系统通过执行规定的功能来实现某一给定目标的一些相互关联单元的组合,称为控制系统。
如室内温度、湿度控制,电机的转速控制,工业上的液位控制、压力控制等手动控制(Manual Control)自动控制(Automatic Control)2.2 什么是自动控制系统自动控制是在没有人的直接干预下,利用物理装置对生产设备和工艺过程进行合理的控制,使被控制的物理量按照预定的规律变化的过程。
通过控制装置执行规定的功能来实现某一给定目标的一些相互关联单元的组合,称为自动控制系统。
2.3 自动控制系统的常用术语在自动控制系统中,被控制的设备或过程称为被控对象(或对象);被控制的物理量称为被控量(或输出量);决定被控量的物理量称为控制量或给定量;妨碍控制量对被控量进行正常控制的所有因素称为扰动量。
给定量和扰动量都是自动控制系统的输入量。
扰动量按其来源分内部扰动和外部扰动。
2.4 自动控制系统的两种外作用1、有效输入信号(简称输入信号)输入信号决定系统被控量的变化规律或代表期望值,并作用于系统的输入端。
2、有害干扰信号(简称干扰信号)干扰信号是系统所不希望而又不可避免的外作用信号,它不但可以作用于系统的任何部位,而且可能不止一个。
由于它会影响输入信号对系统被控量的有效控制,严重时必须加以抑制或补偿。
3.1 开环控制和闭环控制以恒温箱为例以书上晶闸管调速系统为例3.1 开环控制和闭环控制开环控制系统(Open-loop Control System)是指系统的输出端和输入端不存在反馈关系,系统的输出量对控制作用不发生影响的系统。
这种系统既不需要对输出量进行测量,也不需要将输出量反馈到输入端与输入量进行比较,控制装置与被控对象之间只有顺向作用,没有反向联系。
闭环控制系统(Close-loop Control System)系统的控制装置和被控对象不仅有顺向作用,而且输出端和输入端之间存在反馈关系,所以称为闭环控制系统,闭环控制系统就是反馈控制系统。