工业机器人动力学建模与联合仿真_王航
工业机器人运动建模与位姿求解-毕业论文

本科毕业设计(论文)题目:工业机器人运动建模与位姿求解工业机器人运动建模与位姿求解Motion Modeling and Posture Solving of IndustrialRobots摘要随着我国的工业和重工业的迅速发展,对人员需求量也日益增加,这也给人们造成了一定的困扰,于是乎出现了能够减轻人们工作量甚至代替人们工作的机器人,我们也称其称为刚体的位姿。
本文涉及的主要问题山机器人运动的建模问题和位姿求解问题,对加强工业机器人的工作效率起到了一定的作用。
关键词:机器人技术;运动建模:位姿求解ABSTRACTWith the rapid development of industiy and heavy industry in our countiy the demand for personnel is increasing day by day, which also causes some distress to people, so there are robots that can reduce peopled workload and even replace people's work, which we also call industrial robots・With the popularization of industrial robots in various industries, more and more problems appear gradually, which hinders the development of people in the field of robots, and the problem of solving industrial robots has attracted more and more attention. The robot moves in a limited space, and its motion has a certain pose enor. Reducing the eiTor of the robot in the process of work is the center of this paper, the position of the rigid body reference point and the attitude of the rigid body are collectively refeiTed to as the position and posture of the rigid body. The main problems involved in tliis paper are the modeling of the robot motion and the solving of the pose problem, which plays a certain role in eiilianciiig the efficiency of the industrial robot.Key words: Robot teclmology; Motion modeling; Pose solving目录1绪论 (5)1.1课题背景及研究意义 (5)1.2国内外工业机器人研究现状 (5)1.2.1国内对工业机器人的发展及研究现状 (5)1.2.2国外对工业机器人的发展及研究现状 (6)1.3国内外工业机器人运动建模研究现状 (7)1.4本文的主要研究内容 (8)2多刚体运动学理论基础 (10)2.1概述 (10)2.2多刚体系统运动学描述及应用 (10)2.3多刚体系统动力学建模与求解方法 (10)2.3.1多刚体系统动力学建模理论 (10)2.3.2多刚体系统动力学求解方法 (11)2.4本章小结 (12)3工业机器人运动建模 (14)3.1概述 (14)3.2工业机器人的空间运动和建模 (14)3.2.1机器人多维空间的运动和理论 (14)3.2.2工业机器人的建模方法 (14)3.3现代机器人运动建模分析 (17)3.4本章小结 (18)4工业机器人位姿求解 (19)4.1概述 (19)4.2齐次坐标及其变换理论 (19)4.3齐次坐标及其变换求解位姿 (20)4.4本章小结 (22)5全文总结与展望 (23)5.1全文总结 (23)5.2研究展望 (23)参考文献 (25)致谢 (28)1绪论1.1课题背景及研究意义随着机器人的逐渐发展和日渐成熟,工业机器人逐渐加入到人们日常生活和生产中去,机器人也逐渐融入我们的生活,并不只是局限于工业生产中,机器人也给我们的生活带来了许多便利。
空间机器人系统动力学建模与控制仿真研究

4)根据控制律确定关节力矩r,及作用在基座
上的力/力矩; 5)计算加速度
[耋]一1心+[0卜卧nz,
积分可得到速度,再次积分可得到位置; 6)进入下一周期,返回1),继续运算,至仿真结
束.
3仿真实例
基于上面建立的空间机器人建模与控制仿真系
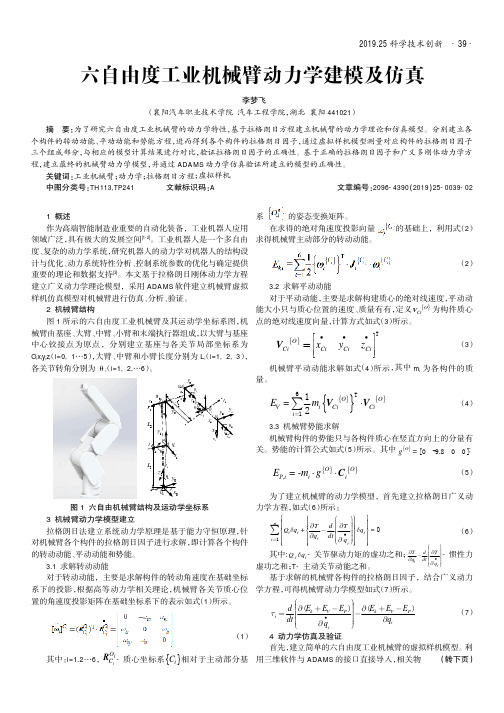
统,进行系统闭环控制仿真.采用的实例是一个带有 六自由度机械臂的空间机器人,系统出基座航天器、 六自由度机械臂、在轨可更换单元(ORU)组成.在 基座姿态受控的情况下,机械臂末端执行器夹持可 更换单元(ORU)在基座正上方0.7 m处作半径为 0.5 m的圆周运动.可将系统作为一个多刚体系统, 并将ORU和空间机器人第六杆等效看作一个整体, 各刚体的质量特性如表1.系统的D—H坐标系如图2 所示.本文采用虚拟机械臂“3的方法来进行空间机 器人系统的逆运动学计算,并进行路径规划(所规划 的路径为0.5 m的圆周).实际机械臂和相应的虚拟
根据拉格朗日一欧拉方程o],可以得到
I--I(q)q 4-C(q+i)=f.
(7)
其中
c(q,i)=H(q)i一。‘21"q7嘶1. (8)
2.4速动力学模型的建立 空间机器人系统的逆动力学方程可采用牛顿~
欧拉法Ⅲ推导得到,限于篇幅,本文不给出其推导过 程。它和空间机器人系统的运动学和动力学模型一 起构成空间机器人系统的动力学建模与仿真系统. 2.5动力学方程的计算过程
基于Coppeliasim与MATLAB的机器人建模与运动仿真

绕 #$ 轴旋转 $5$ "使得 %$ 和 %$5$ 互相平行"因为 !$ 和 !!5都是垂直于 #$ 轴"因此绕 #$ 旋转 $5$ 使它们平行' 并 且共面( % 绕 #$ 轴平移 "$5$ "使得 %$ 和 %$5$ 共线"因为 %$ 和 %$5$ 都是平行并且垂直于 #$ 轴"沿着 #$ 移动则可以使 它们重叠在一起% 绕 %$ 轴平移 "$5$ "使得 %$ 和 %$5$ 的原 点坐标相同% #$ 围绕 %$5$ 旋转 !$5$ "使得 #$ 轴和 #$5$ 轴处 在同一条线上"使得变换前后的坐标系完全重合% 通过上 述变换步骤"得到准确的坐标系变换,$$- %
',O7< J4P0?490?< 02>79R0?S7E@059?01-<D978-/75<456L5D9=9;9702M;90849=05@/=57D7M.4E78< 02-.=75.7D J=405=56-/75<456!&&%%&(
$,L5D9=9;9702T0P09=.D 45EL59711=6759345;24.9;?=56L550H49=05@/=57D7M.4E78< 02-.=75.7D J=405=56-/75<456&&%&(+
,HE$
h
E/-$
% %
lE/-$ ,HE$ ,HE$ ,HE$
E/-$ %
E/-$ E/-$ l,HE$ E/-$
,HE$ %
!$ '()$ !$ E/-$
基于虚拟仿真技术的工业机器人运动控制仿真
基于虚拟仿真技术的工业机器人运动控制仿真工业机器人是一种高精度、高效率的现代生产设备,广泛应用于工业自动化领域。
为了使工业机器人更加稳定、精确地完成各种工作任务,需要对其运动控制系统进行精细的调试和优化。
然而,直接在实际机器人上进行调试非常耗费时间和成本,同时也存在安全隐患。
因此,基于虚拟仿真技术的工业机器人运动控制仿真成为了一种有效的解决方案。
虚拟仿真技术是利用计算机模拟真实环境,进行虚拟试验或仿真的技术。
通过建立准确的模型,将要研究的对象在计算机上进行运动模拟和分析,从而达到预测、优化系统性能的目的。
在工业机器人运动控制方面,虚拟仿真技术可以实现机器人动态运动仿真、控制算法仿真以及多机器人协调控制仿真等模拟实验,为研究可靠控制策略和优化运动轨迹提供有效工具。
在虚拟仿真技术中,常用的建模方法包括灵敏度分析、动力学建模、动力学仿真等方法。
其中,灵敏度分析是一种基于数学模型和因素分析的建模方法,通过对模型和参数的敏感程度进行分析,实现对系统的建模。
而动力学建模主要是分析工业机器人在不同环境下的动力学特性,对机械结构和电气系统进行建模。
动力学仿真则是根据动力学模型,模拟机器人的运动轨迹、力/力矩、速度/角速度等参数,得到机器人在工作过程中的响应和性能表现。
虚拟仿真技术的应用使得机器人的性能测试、控制算法的优化和机器人的协调控制等问题得以更加有效地解决。
基于虚拟仿真技术的机器人控制算法的优化要从控制策略和参数调整两方面入手,通过仿真测试控制策略和参数变化的结果,确定最优的控制方案。
另外,基于虚拟仿真技术的多机器人协调控制仿真可以通过模拟机器人的运动和交互过程,实现多模式下的协调控制,对于工业自动化生产线的集成控制和协调优化有着重要的意义。
虚拟仿真技术的应用还可以帮助工业机器人进行虚拟操作,有效地避免多次试验和操作过程中的安全隐患。
在工作流程中,可以利用虚拟仿真模型为机器人制定良好的运动轨迹和操作规则,从而避免在实际操作中对设备和人员造成的损害。
六自由度工业机械臂动力学建模及仿真
θ6
x5 xn
z5zn
量。
6 1
EV = i1 2 mi
VCiO
T VCiO
(4)
3.3 机械臂势能求解
机械臂构件的势能只与各构件质心在竖直方向上的分量有 关。势能的计算公式如式(5)所示。其中 gO = [ 0 -9.8 0 0 ];
L1
J1
z0 θ1 y0
EP,i = -mi gO CiO
VCiO
xCi
yCi
T zCi
(3)
各关节转角分别为 θ(i i=1, 2,…6)。
机械臂平动动能求解如式(4)所示,其中 mi 为各构件的质
z2 θ 3
O3 a3
O2 x3
J 3
x2 y2
L2 y1
a1
J2
O1
z1 θ
2
x1
y3
θ4
z3yθJ4x45 4 z4
J5
y O 4 O5 5
yn
J6
2019.25 科学技术创新 - 39 -
六自由度工业机械臂动力学建模及仿真
李梦飞 (襄阳汽车职业技术学院 汽车工程学院,湖北 襄阳 441021)
摘 要:为了研究六自由度工业机械臂的动力学特性,基于拉格朗日方程建立机械臂的动力学理论和仿真模型。分别建立各
个构件的转动动能、平动动能和势能方程,进而得到各个构件的拉格朗日因子,通过虚拟样机模型测量对应构件的拉格朗日因子
希望能够为 KJ2000N 安全监控系统高效运行奠定良好基础。
关键词:KJ2000N 安全监控系统;瓦斯监控;防范措施;分析
中图分类号院TD713
文献标识码院A
文章编号院2096-4390渊2019冤25-0040-02
机器人学基础机器人动力学蔡自兴课件

contents
目录
• 机器人动力学概述 • 机器人动力学建模 • 机器人运动学与动力学关系 • 机器人动力学仿真与实验验证 • 机器人动力学在智能控制中应用 • 总结与展望
01
机器人动力学概述
机器人动力学定义 01 02
机器人动力学研究内容01源自动力学建模机器人运动学与动力学关系分析
运动学方程与动力学方程的关系
运动学方程描述了机器人的运动学特性,而动力学方程描述了机器人的动态特性,两者相互关联,共同决定了机 器人的运动行为。
运动学参数对动力学性能的影响
机器人的运动学参数,如连杆长度、关节角度范围等,对机器人的动力学性能有重要影响,如惯性、刚度等。
基于运动学的机器人动力学控制策略
仿真结果展示与分析
轨迹跟踪性能
01
动态响应特性
02
关节力矩变化
03
实验验证方案设计与实施
实验平台搭建 实验参数设置 数据采集与分析
05
机器人动力学在智能控制中应用
智能控制算法在机器人动力学中应用
模糊控制
01
神经网络控制
02
遗传算法优化
03
基于深度学习的机器人动力学控制策略
深度学习模型构建 数据驱动控制 自适应控制
基于运动学的轨迹规划
基于动力学的控制策略
04
机器人动力学仿真与实验验证
机器人动力学仿真方法介绍
动力学模型建立
根据拉格朗日方程或牛顿-欧拉方程,建立机器 人的动力学模型。
仿真软件选择
选择MATLAB/Simulink、ADAMS等仿真软件 进行动力学仿真。
参数设置与初始条件
设定机器人的物理参数、运动范围、初始状态等。
四自由度工业机器人运动学分析与仿真
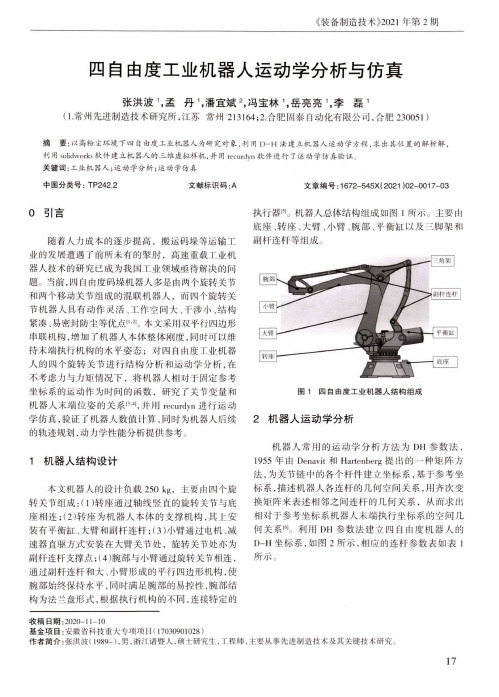
《装备制造技术》2021年第2期四自由度工业机器人运动学分析与仿真张洪波1,孟丹1,潘宜斌2,冯宝林1,岳亮亮1,李磊1 (1•常州先进制造技术研究所,江苏常州213164:2.合肥固泰自动化有限公司,合肥230051 )摘要:以高粉尘环境下四自由度工业机器人为研究对象,利用D-H法建立机器人运动学方程,求出其位置的解析解,利用solidworks软件建立机器人的三维虚拟样机,并用recurdyn软件进行了运动学仿真验证关键词:工业机器人;运动学分析;运动学仿真中图分类号:TP242.2 文献标识码:A 文章编号:1672-545X(2021 >02-0017-030引言随着人力成本的逐步提高,搬运码垛等运输工 业的发展遭遇了前所未有的掣肘,高速重载工业机 器人技术的研究已成为我国工业领域亟待解决的问 题。
当前,四自由度码垛机器人多是由两个旋转关节 和两个移动关节组成的混联机器人,而四个旋转关 节机器人具有动作灵活、工作空间大、干涉小、结构 紧凑、易密封防尘等优点l h21。
本文采用双平行四边形 串联机构,增加了机器人本体整体刚度,同时可以维 持末端执行机构的水平姿态;对四自由度工业机器 人的四个旋转关节进行结构分析和运动学分析,在 不考虑力与力矩情况下,将机器人相对于固定参考 坐标系的运动作为时间的函数,研究了关节变量和 机器人末端位姿的关系i3'并用recurdyn进行运动 学仿真,验证了机器人数值计算,同时为机器人后续 的轨迹规划,动力学性能分析提供参考。
1机器人结构设计本文机器人的设计负载250 kg,主要由四个旋 转关节组成:(1)转座通过轴线竖直的旋转关节与底 座相连;(2)转座为机器人本体的支撑机构,其上安 装有平衡缸、大臂和副杆连杆;(3)小臂通过电机、减 速器直驱方式安装在大臂关节处,旋转关节处亦为 副杆连杆支撑点;(4)腕部与小臂通过旋转关节相连, 通过副杆连杆和大、小臂形成的平行四边形机构,使 腕部始终保持水平,同时满足腕部的易控性,腕部结 构为法兰盘形式,根据执行机构的不同,连接特定的执行器|51。
套装式助力机器人动力学建模与仿真

Dy a i o e i g a d sm u a i n o h we s it d s i o o n m c m d l n i l to n t e po r a ss e u t r b t n
W ANG a L n,L u U L
( o eeo eh ncl n l tcl n ier g a i E gneigU i r t, abn10 0 , hn ) C l g f ca i dEe r a E gnei ,H r n n ier nv s y H ri 5 0 C i l M aa ci n b n ei 1 a
c n is e i a dk e i , n e e r e yteD oo—r e rw n t o y ae nMa a / i uik n i Meh nc , o t n l s n n e o t a dt y r di nb C m t di ns e — u b d .B sdo t b Sm l dSm c a i a p v jn h w e v h r v c l n a s ter o S y a i o e a dc nr o e w r cn t ce .T eP o t l r a a o t . h b t i l ji t so d t j t h o t n m c m d l n o t l d l ee o s u t b ’d s om r d h D c n o e w s d p d T e o o s ge o t e r p n , r e o rl e r n ns p e ac—
Absr c t a t:Ai ng a h i c ly o h le l n h n im l i g id pe e ty,a k n fpo ra sse utr b twa e e r h d t mi tt e df ut ft e ed ry a d t e ifr wa k n n e nd n l i i d o we s itd s i o o s rs a c e o hep p o l l n n e e e ty Th o o s wo n o h o rlmb o ma o y, a d i flo he mo e n fte lwe i o l e p ewakig i d p nd nl . e r b ti r n t e l we —i fhu n b d n t o lws t v me to h o rlmbst p o i o up o t n te prc s fh r vde s me s p rs i h o e s o uma l i . Th o t e ie a ih i r e ine y n wa kng e rbo’ lf sd nd rg tsdewe e d sg d s mme rc l S t tial Ea h sd fr b t y. c ie o o o