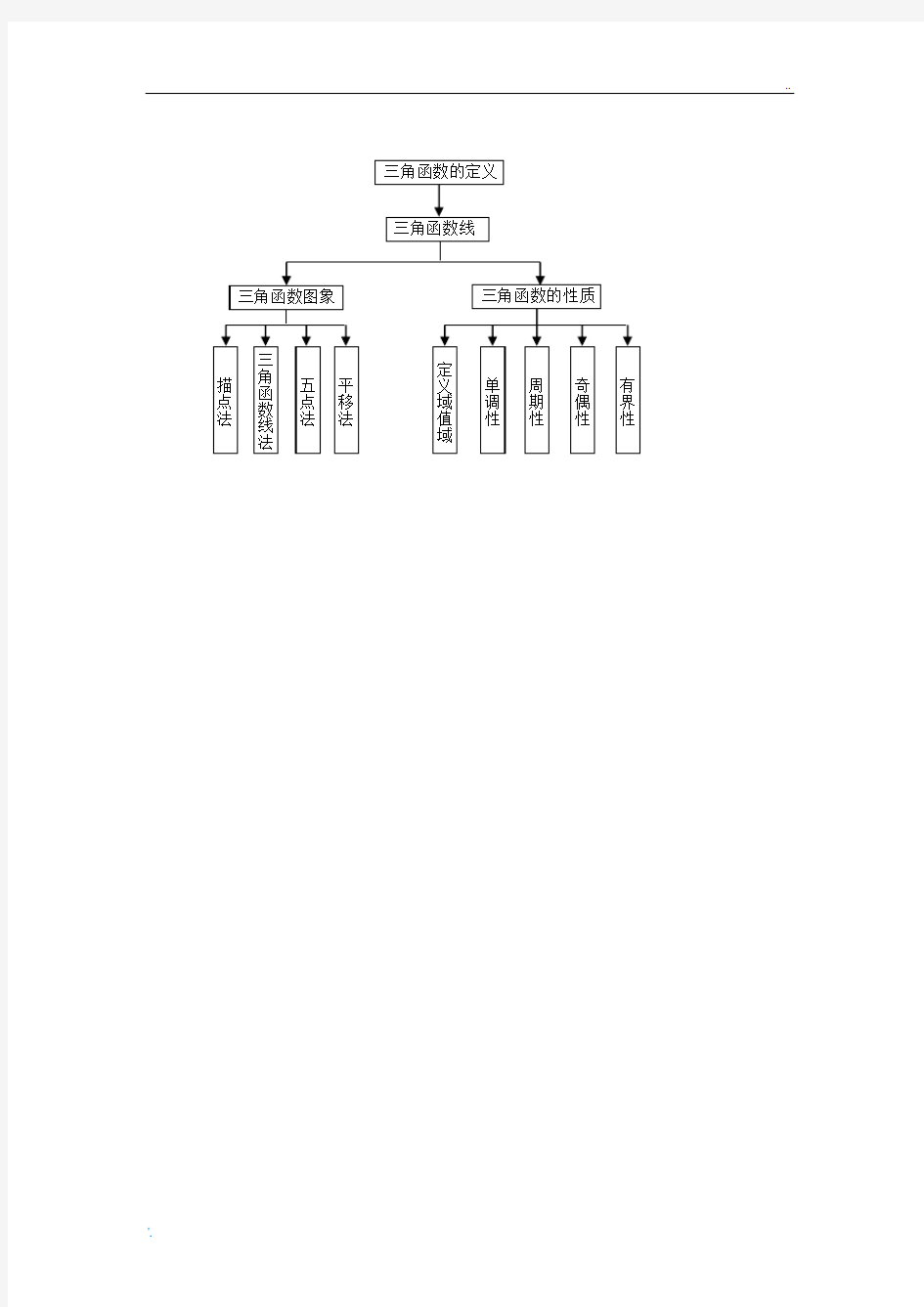
三角函数知识结构图
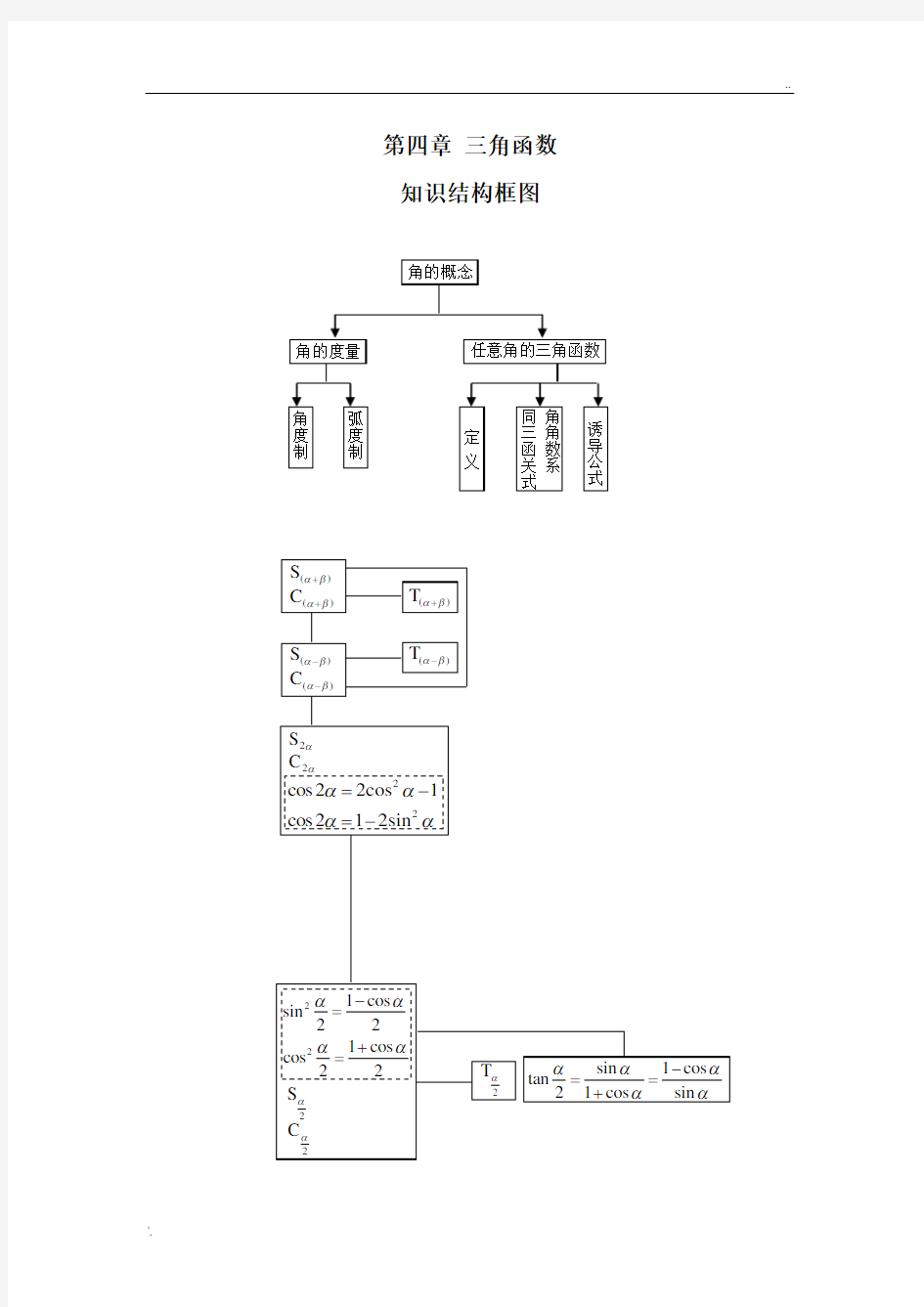
第四章 三角函数 知识结构框图
()()S C αβαβ++ ()T αβ+ ()T αβ- ()()S C αβαβ-- 22S C αα 22cos 22cos 1cos 212sin αααα=-=- 221cos sin 221cos cos 22αααα-=+= 22
S C αα 2T α sin 1cos tan 21cos sin ααααα-==+
高中数学三角函数知识点(复习)
三角函数知识点复习 §1.1.1、任意角 1、正角、负角、零角、象限角的概念. 2、 与角终边相同的角的集合: . §1.1.2、弧度制 1、把长度等于半径长的弧所对的圆心角叫做1弧度的角. 2、 . 3、弧长公式:. 4、扇形面积公式:. §1.2.1、任意角的三角函数 1、设是一个任意角,它的终边与单位圆交于点,那么: 2、 设点为角终边上任意一点,那么:(设),,, 3、 ,,在四个象限的符号和三角函数线的画法. 正弦线:MP; 余弦线:OM; 正切线:AT 5、特殊角0°,30°,45°,60°, 1、平方关系:. 2、商数关系:. 3、倒数关系: §1.3、三角函数的诱导公式 (概括为“奇变偶不变,符号看象限”) 1、 诱导公式一: (其中:)
2、 诱导公式二: 3、诱导公式三: 4、诱导公式四: 5、诱导公式五: 6、诱导公式六: §1.4.1、正弦、余弦函数的图象和性质 1、记住正弦、余弦函数图象: 2、能够对照图象讲出正弦、余弦函数的相关性质:定义域、值域、最大 最小值、对称轴、对称中心、奇偶性、单调性、周期性. 3、会用五点法作图. 在上的五个关键点为:
§1.4.3、正切函数的图象与性质 图表归纳:正弦、余弦、正切函数的图像及其性质
图象
定 义 域 值 域 [-1,1][-1,1] 最 值 周 期 性 奇 偶 性 奇偶 单调性在上单调递增 在上单调递减 在上单调递增 在上单调递减 对称性对称轴方程: 对称中心 对称轴方程: 对称中心
1、记住正切函数的图象: 2、记住余切函数的图象:
结构力学知识点复习过程
建筑物和工程设施中承受、传递荷载而起骨架作用的部分称为工程结构,简称为结构。 从几何角度来看,结构可分为三类,分别为:杆件结构、板壳结构、实体结构。 结构力学中所有的计算方法都应考虑以下三方面条件: ①力系的平衡条件或运动条件。 ②变形的几何连续条件。 ③应力与变形间的物理条件(或称为本构方程)。 结点分为:铰结点、刚结点。 铰结点:可以传递力,但不能传递力矩。 刚结点:既可以传递力,也可以传递力矩。 支座按其受力特质分为:滚轴支座、铰支座、定向支座、固定支座。 在结构计算中,为了简化,对组成各杆件的材料一般都假设为:连续的、均匀的、各向同性的、完全弹性或弹塑性的。 荷载是主动作用于结构的外力。 狭义荷载:结构的自重、加于结构的水压力和土压力。 广义荷载:温度变化、基础沉降、材料收缩。 根据荷载作用时间的久暂,可以分为:恒载、活载。 根据荷载作用的性质,可以分为:静力荷载、动力荷载。 结构的几何构造分析 在几何构造分析中,不考虑这种由于材料的应变所产生的变形。 杆件体系可分为两类: 几何不变体系------在不考虑材料应变的条件下,体系的位置和形状是不能改变的。 几何可变体系------在不考虑材料应变的条件下,体系的位置和形状是可以改变的。 自由度:一个体系自由度的个数,等于这个体系运动时可以独立改变的坐标的个数。 一点在平面内有两个自由度(横纵坐标)。 一个刚片在平面内有三个自由度(横纵坐标及转角)。 凡是自由度的个数大于零的体系都是几何可变体系。 一个支杆(链杆)相当于一个约束。可以减少一个自由度。 一个单铰(只连接两个刚片的铰)相当于两个约束。可以减少两个自由度。一个单刚结(刚性结合)相当于三个约束,可以减少三个自由度。 如果在一个体系中增加一个约束,而体系的自由度并不因而减少,则此约束称为多余约束。增加了约束,计算自由度会减少。因为w=s-n . 瞬变体系:本来是几何可变、经微小位移后又成为几何不变的体系称为瞬变体系。 实铰:两个刚片(地基也算一个刚片),如果用两根链杆给链接上,并且两根链杆能在其中一个刚片上交于一点,所构成的铰就叫实铰。 瞬铰:两个刚片(地基也算一个刚片),如果用两根链杆给链接上,两根链杆在两刚片间没有交于一点,而是在两根链杆的延长线上交于一点,从瞬时微小运动来看,这就是瞬铰了。两根链杆所起的约束作用等效于在链杆交点处上面放了一个单铰的约束作用。通常所起作用为转动。 截面上应力沿杆轴切线方向的合力,称为轴力。轴力以拉力为正。 截面上应力沿杆轴法线方向的合力称为剪力。剪力以绕微段隔离体顺时针转者为正。 截面上应力对截面形心的力矩称为弯矩。在水平杆件中,当弯矩使杆件下部受拉时,弯矩为正。 作轴力图和剪力图要注明正负号。作弯矩图时,规定弯矩图的纵坐标应画在受拉纤维一边,不注明正负号。 通常在桁架的内力计算中,采用下列假定: ①桁架的结点都是光滑的铰结点; ②各杆的轴线都是直线并通过铰的中心; ③荷载和支座反力都作用在结点上。 根据几何构造的特点,静定平面桁架可分为三类:简单桁架,联合桁架,复杂桁架。 在单杆的前提下,当结点无荷载作用时,单杆的内力必为零。此单杆称为零杆。 由链杆和梁式杆组成的结构,称为组合结构。 链杆只受轴力作用;梁式杆除受轴力作用外,还受弯矩和剪力作用。 三铰拱受力特点: ①在竖向荷载作用下,梁没有水平反力,而拱则有推力。 ②由于推力的存在,三铰拱截面上的弯矩比简支梁的弯矩小。弯矩的降低,使拱能更充分地发挥材料的作用。 ③在竖向荷载作用下,梁的截面内没有轴力,而拱的截面内轴力较大,且一般为压力。 合理拱轴线:在固定荷载作用下使拱处于无弯矩、无剪力、而只有轴力作用的轴线。 合理轴线:通常指具有不同高跨比的一组抛物线。 影响线 内力影响线:表示单位移动荷载作用下内力变化规律的图形。无论在剪力、弯矩、支座反力的影响线图中都需要标上正负号。影响线是研究移动荷载最不利位置和计算内力最大值(或最小值)的基本工具。 荷载:特定单位移动荷载P=1 固定、任意荷载最不利位置:如果荷载移动到某个位置,使某量Z达到最大值,则此荷载位置称为最不利位置。 影响线的一个重要作用,就是用来确定荷载的最不利位置。 定出荷载最不利位置判断的一般原则是:应当把数量大、排列密的荷载放在影响线竖距较大的部位。 计算结构的位移目的有两个: ①一个目的是验算结构的刚度,即验算结构的位移是否超过允许的位移限值。 ②另一个目的是为超静定结构的内力分析打下基础。 产生位移的原因主要有下列三种: ①荷载作用②温度变化和材料胀缩③支座沉降和制造误差 一组力可以用一个符号P表示,相应的位移也可用一个符号Δ表示,这种夸大了的力和位移分别称为广义力和广义位移。 图乘法的应用条件:①杆段应是等截面直杆段。②两个图形中至少应有一个是直线,标距y0 应取自直线图中。 互等定理包括四个普遍定理:①功的互等定理②位移互等定理 ③反力互等定理④位移反力互等定理。 3、对称结构就是指: ①结构的几何形式和支承情况对某轴对称。 ②杆件截面和材料性质也对此轴对称。(因而杆件的截面刚度EI对此轴对称) 4、对称荷载:对称荷载绕对称轴对折后,左右两部分的荷载彼此重合(作用点相对应、数值相等、方向相同) 反对称荷载:反对称荷载绕对称轴对折后,左右两部分的荷载正好相反(作用点相对应、数值相等、方向相反) 超静定结构有一个重要特点,就是无荷载作用时,由于其他因素(如:支座移动、温度改变、材料收缩、制造误差)的作用也可以产生内力。 超静定结构:由于其他因素(如:支座移动、温度改变、材料收缩、制造误差)的作用可以产生位移也可以产生内力。 静定结构:由于其他因素(如:支座移动、温度改变、材料收缩、制造误差)的作用可以产生位移但不能产生内力。 力法:多余未知力静定结构变形协调(位移相等) 位移法:结构独立结点位移(角、线位移)超静定单杆(是用位移表示的)平衡方程 2、系数EAi /Li是使杆端产生单位位移时所需施加的杆端力,称为杆件的刚度系数。 体系的自由度指的是确定物体位置所需要的最少坐标数目。 拱的基本特点是在竖向荷载作用下会产生水平支座反力。 .静定结构的特性:(1)静定结构的全部约束反力与内力都可以用静力平衡方程求得。(2)温度变化、支座位移不引起静定结构的内力。3)当一个平衡力系作用在静定结构的某一自身几何不变的杆上时,静定结构只在该力系作用的杆段内产生内力。(4).作用在静定结构的某一自身为几何不变的杆 段上的某一荷载,若用在该段上的一个等效 力系来代替,则结构仅在该段上的内力发生 变化,其余部分内力不变。 1.平面杆件结构分类? 梁、刚架、拱、桁架、组合结构。 2.请简述几何不变体系的俩刚片规则。 两刚片用一个铰和一根不通过该铰链中心的链杆或不全交于一点也不全平行的三根链杆相联,则组成的体系是几何不变的,并且没有多余约束。 3.请简述几何不变体系的三刚片规则。 三刚片用不共线的三个铰两两相联或六根链杆两两相联,则组成的体系是几何不变体系,且没有多余约束。 4.从几何组成分析上来看什么是静定结构,什么是超静定结构?(几何特征) 无多余约束的几何不变体系是静定结构,有多余约束的几何不变体系是超静定结构,有几个多余约束,即为几次超静定。 5.静定学角度分析说明什么是静定结构,什么是超静定结构? 只需要利用静力平衡条件就能计算出结构全部支座反力和构件内力的结构称为静定结构;全部支座反力和构件内力不能只用静力平衡条件确定的结构称为超静定结构。 6.如何区别拱和曲梁 杆轴为曲线且在竖向荷载作用下能产生水平推力的结构,称为拱;杆轴为曲线,但在竖向荷载作用下无水平推力产生,称为曲梁。 7.合理拱轴的条件? 在已知荷载作用下,如所选择的三铰拱轴线能使所有截面上的弯矩均等于零,则此拱轴线为合理拱轴线。 仅供学习与参考
高中数学三角函数知识点总结(非常好用)
高中数学三角函数知识点总结 1.特殊角的三角函数值: 2.角度制与弧度制的互化:,23600π= ,1800π= 1rad =π 180°≈°=57°18ˊ. 1°= 180 π≈(rad ) 3.弧长及扇形面积公式 弧长公式:r l .α= 扇形面积公式:S=r l .2 1 α----是圆心角且为弧度制。 r-----是扇形半径 4.任意角的三角函数 设α是一个任意角,它的终边上一点p (x,y ), r=22y x + (1)正弦sin α= r y 余弦cos α=r x 正切tan α=x y (2)各象限的符号: x y + O — — + # x y O — + + — + y O ) | — + + —
sin α cos α tan α 5.同角三角函数的基本关系: (1)平方关系:s in 2α+ cos 2α=1。(2)商数关系:αα cos sin =tan α (z k k ∈+≠ ,2 ππ α) 6.诱导公式:记忆口诀:2 k παα±把的三角函数化为的三角函数,概括为:奇变偶不变,符号 看象限。 ()()1sin 2sin k παα+=,()cos 2cos k παα+=,()()tan 2tan k k παα+=∈Z . ()()2sin sin παα+=-,()cos cos παα+=-,()tan tan παα+=. ' ()()3sin sin αα-=-,()cos cos αα-=,()tan tan αα-=-. ()()4sin sin παα-=,()cos cos παα-=-,()tan tan παα-=-. 口诀:函数名称不变,符号看象限. ()5sin cos 2π αα??-= ???,cos sin 2παα?? -= ??? . ()6sin cos 2π αα??+= ???,cos sin 2παα?? +=- ??? . 口诀:正弦与余弦互换,符号看象限. 7正弦函数、余弦函数和正切函数的图象与性质
三角函数知识点归纳
第一章:三角函数 §、任意角 1、 正角、负角、零角、象限角的概念. 2、 与角α终边相同的角的集合: {}Z k k ∈+=,2παββ. §、弧度制 1、 把长度等于半径长的弧所对的圆心角叫做1弧度的角. 2、 r l = α. 3、弧长公式:R R n l απ== 180 . 4、扇形面积公式:lR R n S 2 1 3602== π. §、任意角的三角函数 y =α αcos ,sin 1、 设α是一个任意角,它的终边与单位圆交于点()y x P ,,那么: 2、 设点(),A x y 为角α终边上任意一点,那么: (设r = sin y r α= ,cos x r α=,tan y x α=,cot x y α= 3、 αsin ,αcos ,αtan 在四个象限的符号和三角函数线的画法. 正弦线:MP; 余弦线:OM; 正切线:AT 5、 特殊角 . 1、 平方关系:1cos sin 22=+αα. 2、 商数关系:α α αcos sin tan = . 3、 倒数关系:tan cot 1αα= §、三角函数的诱导公式 (概括为“奇变偶不变,符号看象限”Z k ∈) 1、 诱导公式一:、 诱导公式二: ()()().tan 2tan ,cos 2cos ,sin 2sin απααπααπα=+=+=+k k k ()()(). tan tan ,cos cos , sin sin ααπααπααπ=+-=+-=+(其中:Z k ∈)
3、诱导公式三: 4、诱导公式四: ()()(). tan tan ,cos cos ,sin sin αααααα-=-=--=- ()()(). tan tan ,cos cos ,sin sin ααπααπααπ-=--=-=- 5、诱导公式五: 6、诱导公式六: .sin 2cos ,cos 2sin ααπααπ=??? ??-=??? ??- .sin 2cos ,cos 2sin ααπααπ-=?? ? ??+=??? ??+ §、正弦、余弦函数的图象和性质 1、记住正弦、余弦函数图象: 2、能够对照图象讲出正弦、余弦函数的相关性质:定义域、值域、最大最小值、对称轴、对称中 心、奇偶性、单调性、周期性. 3、会用五点法作图. sin y x =在[0,2]x π∈上的五个关键点为: 30010-1202 2 π π ππ(,)(,,)(,,)(,,)(,,). §、正切函数的图象与性质 1、记住正切函数的图象: 2、记住余切函数的图象: 3、能够对照图象讲出正切函数的相关性质:定义域、值域、对称中心、奇偶性、单调性、周期性. 周期函数定义:对于函数()x f ,如果存在一个非零常数T ,使得当x 取定义域内的每一个值时,都有()(),那么函数()x f 就叫做周期函数,非零常数T 叫做这个函数的周期.
高中数学三角函数知识点归纳总结
《三角函数》 【知识网络】 一、任意角的概念与弧度制 1、将沿x 轴正向的射线,围绕原点旋转所形成的图形称作角. 逆时针旋转为正角,顺时针旋转为负角,不旋转为零角 2、同终边的角可表示为 {}()360k k Z ααβ? =+∈g x 轴上角:{}()180k k Z αα=∈o g y 轴上角:{}()90180k k Z αα=+∈o o g 3、第一象限角:{}()036090360k k k Z αα? ?+<<+∈o g g 第二象限角:{}()90 360180360k k k Z αα??+<<+∈o o g g 第三象限角:{}()180360270360k k k Z αα? ?+<<+∈o o g g 第四象限角: {}()270 360360360k k k Z αα??+<<+∈o o g g 4、区分第一象限角、锐角以及小于90o 的角 第一象限角:{}()0360 90360k k k Z αα? ?+<<+∈o g g 锐角: {}090αα< ,2 4 , 0π απ ≤ ≤=k ,2 345, 1παπ≤≤=k 所以 2 α 在第一、三象限 6、弧度制:弧长等于半径时,所对的圆心角为1弧度的圆心角,记作1rad . 7、角度与弧度的转化:01745.0180 1≈=?π 815730.571801'?=?≈? = π 9、弧长与面积计算公式 弧长:l R α=?;面积:211 22 S l R R α=?=?,注意:这里的α均为弧度制. 二、任意角的三角函数 1、正弦:sin y r α=;余弦cos x r α=;正切tan y x α= 其中(),x y 为角α终边上任意点坐标,r = 2、三角函数值对应表: 3、三角函数在各象限中的符号 ★高中三角函数部分总结 1.任意角的三角函数定义: 设α为任意一个角,点),(y x P 是该角终边上的任意一点(异于原点),),(y x P 到原点的距离为22y x r += ,则: )(tan ),(cos ),(sin y x x y x r x y r y ?=== 正负看正负看正负看ααα 2.特殊角三角函数值: sin30°=1/2 sin45°=√2/2 sin60°=√3/2 cos30°=√3/2 cos45°=√2/2 cos60°=1/2 tan30°=√3/3 tan45°=1 tan60°=√3 cot30°=√3 cot45°=1 cot60°=√3/3 sin15°=(√6-√2)/4 sin75°=(√6+√2)/4 cos15°=(√6+√2)/4 cos75°=(√6-√2)/4(这四个可根据sin (45°±30°)=sin45°cos30°±cos45°sin30°得出) sin18°=(√5-1)/4 (这个值 3.同角三角函数公式: αααααααααα αtan 1 cot ,sin 1csc ,cos 1sec 1cos sin ,cos sin tan 22= ===+= 4.三角函数诱导公式: (1))(;tan )2tan(,cos )2cos( ,sin )2sin(Z k k k k ∈=+=+=+απααπααπα (2);tan )tan(,cos )cos( ,sin )sin(απααπααπα=+-=+-=+ (3);tan )tan(,cos )cos(,sin )sin(αααααα-=-=--=- (函数名称不变,符号看象限) 三角函数 一、任意角、弧度制及任意角的三角函数 1.任意角 (1)角的概念的推广 ①按旋转方向不同分为正角、负角、零角. ?? ??? 正角:按逆时针方向旋转形成的角任意角负角:按顺时针方向旋转形成的角零角:不作任何旋转形成的角 ②按终边位置不同分为象限角和轴线角. 角α的顶点与原点重合,角的始边与x 轴的非负半轴重合,终边落在第几象限,则称α为第几象限角. 第一象限角的集合为{} 36036090,k k k αα?< 结构力学主要知识点 一、基本概念 1、计算简图:在计算结构之前,往往需要对实际结构加以简化,表现其主要特点,略去其次要因素,用一个简化图形来代替实际结构。通常包括以下几个方面: A 、杆件的简化:常以其轴线代表 B 、支座和节点简化: ①活动铰支座、固定铰支座、固定支座、滑动支座; ②铰节点、刚节点、组合节点。 C 、体系简化:常简化为集中荷载及线分布荷载 D 、体系简化:将空间结果简化为平面结构 2、结构分类: A 、按几何特征划分:梁、拱、刚架、桁架、组合结构、悬索结构。 B 、按内力是否静定划分: ①静定结构:在任意荷载作用下,结构的全部反力和内力都可以由静力平衡条件确定。 ②超静定结构:只靠平衡条件还不能确定全部反力和内力,还必须考虑变形条件才能确定。 二、平面体系的机动分析 1、体系种类 A 、几何不变体系:几何形状和位置均能保持不变;通常根据结构有无多余联系,又划分为无多余联系的几何不变体系和有多余联系的几何不变体系。 B 、几何可变体系:在很小荷载作用下会发生机械运动,不能保持原有的几何形状和位置。常具体划分为常变体系和瞬变体系。 2、自由度:体系运动时所具有的独立运动方程式数目或者说是确定体系位置所需的独立坐标数目。 3、联系:限制运动的装置成为联系(或约束)体系的自由度可因加入的联系而减少,能减少一个自由度的装置成为一个联系 ①一个链杆可以减少一个自由度,成为一个联系。②一个单铰为两个联系。 4、计算自由度:)2(3r h m W +-=,m 为刚片数,h 为单铰束,r 为链杆数。 A 、W>0,表明缺少足够联系,结构为几何可变; B 、W=0,没有多余联系; C 、W<0,有多余联系,是否为几何不变仍不确定。 5、几何不变体系的基本组成规则: A 、三刚片规则:三个刚片用不在同一直线上的三个单铰两两铰联,组成的体系是几何不变的,而且没有多余联系。 B 、二元体规则:在一个刚片上增加一个二元体,仍未几何不变体系,而且没有多余联系。 C 、两刚片原则:两个刚片用一个铰和一根不通过此铰的链杆相联,为几何不变体系,而且没有多余联系。 6、虚铰:连接两个刚片的两根链杆的作用相当于在其交点处的一个单铰。虚铰在无穷远处的体系分析可见结构力学P20,自行了解。 7、静定结构的几何构造为特征为几何不变且无多余联系。 三、静定梁与静定钢架 1、内力图绘制: A 、内力图通常是用平行于杆轴线方向的坐标表示截面的位置,用垂直于杆轴线的坐标表示 高中数学必修4知识点总结 第一章 三角函数(初等函数二) ?? ?? ?正角:按逆时针方向旋转形成的角1、任意角负角:按顺时针方向旋转形成的角零角:不作任何旋转形成的角 2、角α的顶点与原点重合,角的始边与x 轴的非负半轴重合,终边落在第几象限,则称α为第几象限角. 第一象限角的集合为{} 36036090,k k k αα?<, 则sin y r α= ,cos x r α= ,()tan 0y x x α= ≠. 10、三角函数在各象限的符号:第一象限全为正,第二象限正弦为正,第三象限正切为正,第四象限余弦为正. 11、三角函数线:sin α=M P ,cos α=O M ,tan α=AT . 12、同角三角函数的基本关系:()2 2 1sin cos 1αα+= 高一三角函数知识 §1.1任意角和弧度制 ?? ? ??零角负角:顺时针防线旋转正角:逆时针方向旋转 任意角..1 2.象限角:在直角坐标系中,使角的顶点与原点重合,角的始边与x 轴的非负半轴重合,角的终边在第几象限,就说这个角是第几象限的角。如果角的终边在坐标轴上,就认为这个角不属于任何象限。 3.. ①与α(0°≤α<360°)终边相同的角的集合:{} Z k k ∈+?=,360|αββ ②终边在x 轴上的角的集合: {} Z k k ∈?=,180| ββ ③终边在y 轴上的角的集合:{} Z k k ∈+?=,90180| ββ ④终边在坐标轴上的角的集合:{} Z k k ∈?=,90| ββ ⑤终边在y =x 轴上的角的集合:{ } Z k k ∈+?=,45180| ββ ⑥终边在x y -=轴上的角的集合:{} Z k k ∈-?=,45180| ββ ⑦若角α与角β的终边关于x 轴对称,则角α与角β的关系:Z k k ∈-=,βα 360 ⑧若角α与角β的终边关于y 轴对称,则α与角β的关系:Z k k ∈-+=,βα 180360 ⑨若角α与角β的终边在一条直线上,则α与角β的关系:Z k k ∈+=,βα 180 ⑩角α与角β的终边互相垂直,则α与角β的关系:Z k k ∈++=, 90180βα 4. 弧度制:把等于半径长的圆弧所对的圆心角叫做一弧度。360度=2π弧度。若圆心角所对 的弧长为l ,则其弧度数的绝对值|r l = α,其中r 是圆的半径。 5. 弧度与角度互换公式: 1rad =(π 180)°≈57.30° 1°=180 π 注意:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零. 6.. 第一象限的角:? ?? ? ??∈+< 结构力学各章重要内容、知识点、难点 1、绪论 知识点:结构和结构的分类,结构力学的任务,结构的计算简图与杆件结构分类,荷载的分类。 重点:结构的计算简图选择原则、简化要点,结点和支座的变形和受力特性。难点:活载,铰结点、刚结点、组合结点的特点。 2、平面体系的几何组成分析 知识点:自由度、约束、瞬铰、多余约束等概念, 体系自由度计算公式,平面几何不变体系的组成规则,瞬变体系的特性,静定、超静定结构的几何 组成。 重点:应用平面几何不变体系的组成规则分析平面杆系的几何组成。 难点:复杂平面杆系的几何分析。 3、静定梁和静定刚架 知识点:截面法计算指定截面的内力,利用微分关系作内力图,分段迭加法画弯矩图,简支斜梁的计算,多跨静定梁的组成特点及计算。静定平面刚 架的特点、几何组成及型式,反力的计算,内力的计算和内力图的绘制, 内力图的校核。 重点:分段迭加法画弯矩图;多跨静定梁反力、内力的计算及内力图绘制;静定平面刚架内力的计算和内力图。 难点:简支斜梁的计算;已知弯矩图,绘制剪力图、轴力图。 4、三铰拱 知识点:三铰拱的组成和类型,三铰拱的反力和内力,三铰拱的受力特点,合理轴线。 重点:三铰拱的反力和内力计算。 难点:三铰拱截面剪力和轴力的计算。 5、静定桁架和组合结构 知识点:桁架的特点和组成分类,结点法、截面法和联合法求桁架内力,组合结构的内力计算。 重点:特殊杆内力判断,结点法、截面法和联合法求桁架内力,组合结构的内力计算。 难点:复杂桁架内力计算,组合结构中梁式杆的弯矩图。 6、虚功原理和结构位移计算 知识点:位移计算的目的;变形体系的虚功原理;结构位移计算的一般公式; 静定结构在荷载作用下的位移计算;图乘法;静定结构由于温度变化 及支座移动下的位移计算;线弹性结构的互等定理。 重点:静定结构在荷载作用下的位移计算。 难点:图乘法。 7、力法 知识点:超静定结构和超静定次数,力法的基本结构、基本未知量、及其物理意义,利用对称性简化力法计算,超静定结构位移的计算。 重点:根据力法基本方程物理意义列各类结构在各种外界因素作用时的基本方程并计算内力和位移,对称结构取“半边结构”。 难点:支座移动时的力法计算,计算超静定结构位移时基本结构的选择,力法 高中数学三角函数知识点总结 1.特殊角的三角函数值: 2.角度制与弧度制的互化: ,23600π= ,1800 π= 1rad =π 180°≈57.30°=57°18ˊ 1°= 180 π≈0.01745(rad ) 3.弧长及扇形面积公式 (1)弧长公式:r l .α= α----是圆心角且为弧度制 (2)扇形面积公式:S=r l .2 1 r-----是扇形半径 4.任意角的三角函数 设α是一个任意角,它的终边上一点p (x,y ), r=22y x + (1)正弦sin α= r y 余弦cos α=r x 正切tan α=x y (2)各象限的符号: 记忆口诀:一全正,二正弦,三两切,四余弦 sin α cos α tan α 5.同角三角函数的基本关系: (1)平方关系:s in 2α+ cos 2α=1 (2)商数关系:ααcos sin =tan α(z k k ∈+≠,2 ππ α) 6.诱导公式: 记忆口诀:把2 k π α±的三角函数化为α的三角函数,概括为:奇变偶不变,符号看象限。 ()()1sin 2sin k παα+=,()cos 2cos k παα+=,()()tan 2tan k k παα+=∈Z . ()()2sin sin παα+=-,()cos cos παα+=-,()tan tan παα+=. ()()3sin sin αα-=-,()cos cos αα-=,()tan tan αα-=-. ()()4sin sin παα-=,()cos cos παα-=-,()tan tan παα-=-. 口诀:函数名称不变,符号看象限. ()5sin cos 2π αα??-= ???,cos sin 2παα?? -= ??? . ()6sin cos 2π αα??+= ???,cos sin 2παα?? +=- ??? . 口诀:正弦与余弦互换,符号看象限. x y O — + + — + y O — + + — 第 1 页 共 1 页 三角函数知识点 ?? ??? 正角:按逆时针方向旋转形成的角1、任意角负角:按顺时针方向旋转形成的角零角:不作任何旋转形成的角 2、角α的顶点与原点重合,角的始边与x 轴的非负半轴重合,终边落在第几象限,则称α为第几象限角. 第一象限角的集合为{} 36036090,k k k αα?<,则sin y r α= ,cos x r α=,()tan 0y x x α=≠. 10、三角函数在各象限的符号:第一象限全为正, 第二象限正弦为正,第三象限正切为正,第四象限余弦为正. 11、三角函数线:sin α =MP ,cos α=OM ,tan α=AT . 高中数学必修三角函数知 识点与题型总结 Last updated on the afternoon of January 3, 2021 三角函数典型考题归类 1.根据解析式研究函数性质 例1(天津理)已知函数()2cos (sin cos )1f x x x x x =-+∈R ,. (Ⅰ)求函数()f x 的最小正周期;(Ⅱ)求函数()f x 在区间π3π84?? ????,上的最小值和最大值. 【相关高考1】(湖南文)已知函数2πππ()12sin 2sin cos 888f x x x x ????? ?=-++++ ? ? ?????? ?. 求:(I )函数()f x 的最小正周期;(II )函数()f x 的单调增区间. 【相关高考2】(湖南理)已知函数2π()cos 12f x x ? ?=+ ?? ?,1()1sin 22g x x =+. (I )设0x x =是函数()y f x =图象的一条对称轴,求0()g x 的值.(II )求函数()()()h x f x g x =+的单调递增区间. 2.根据函数性质确定函数解析式 例2(江西)如图,函数π 2cos()(00)2 y x x >ωθωθ=+∈R ,,≤≤的图象与y 轴相交于点(0,且 该函数的最小正周期为π. (1)求θ和ω的值; (2)已知点π02A ?? ??? ,,点P 是该函数图象上一点,点00()Q x y ,是PA 的中点,当0y = 0ππ2x ?? ∈???? ,时,求0x 的值. 【相关高考1】(辽宁)已知函数2 ππ()sin sin 2cos 662x f x x x x ωωω??? ?=++--∈ ? ???? ?R ,(其中0ω>),(I )求函数()f x 的值域;(II )(文)若函数()y f x =的图象与直线1y =-的两个相邻交 点间的距离为 π 2 ,求函数()y f x =的单调增区间. 结构力学知识点总结 1.关于∞点和∞线的下列四点结论: (1) 每个方向有一个∞点(即该方向各平行线的交点)。 (2) 不同方向上有不同的∞点。 (3) 各∞点都在同一直线上,此直线称为∞线。 (4) 各有限远点都不在∞线上。 2.多余约束与非多余约束是相对的,多余约束一般不是唯一指定的。一个体系中有多个约束时,应当分清多余约束和非多余约束,只有非多余约束才对体系的自由度有影响。 3.W>0, 缺少足够约束,体系几何可变。W=0, 具备成为几何不变体系所要求 的最少约束数目。W<0,体系具有多余约束。 4.一刚片与一结点用两根不共线的链杆相连组成的体系内部几何不变且无多余约束。 两个刚片用一个铰和一根不通过此铰的链杆相联,组成无多余约束的几何不变体系。 两个刚片用三根不全平行也不交于同一点的链杆相联,组成无多余约束的几何不变体系。 9.剪力图上某点处的切线斜率等于该点处荷载集度q 的大小 ; 弯矩图上某点处的切线斜率等于该点处剪力的大小。 10. 梁上任意两截面的剪力差等于两截面间载荷图所包围的面积; 梁上任意两截面的弯矩差等于两截面间剪力图所包围的面积。 11.分布力q(y)=0时(无分布载荷),剪力图为一条水平线;弯矩图为一条斜直线。 () ()Q dM x dF x dx =2 2 ()()()Q dF x d M x q y dx dx ==-,,B A B A B A x NB NA x x x QB QA y x x B A Q x F F q dx F F q dx M M F dx =-=- =+ ? ? ? 分布力q(y) = 常数时,剪力图为一条斜直线;弯矩图为一条二次曲线。 12.只有两杆汇交的刚结点,若结点上无外力偶作用,则两杆端弯矩必大小相等,且同侧受拉。 13.对称结构受正对称荷载作用, 内力和反力均为对称(K行结点不受荷载情况)。对称结构受反对称荷载作用, 内力和反力均为反对称。 14.三铰拱支反、内力计算公式(竖向荷载、两趾等高) 第一章绪论 §1-1 结构力学的研究对象和任务 一、结构的定义:由基本构件(如拉杆、柱、梁、板等)按照合理的方式所组成的构件的体系,用以支承荷载并传递荷载起支撑作用的部分。 注:结构一般由多个构件联结而成,如:桥梁、各种房屋(框架、桁架、单层厂房)等。最简单的结构可以是单个的构件,如单跨梁、独立柱等。 二、结构的分类:由构件的几何特征可分为以下三类 1.杆件结构——由杆件组成,构件长度远远大于截面的宽度和高度,如梁、柱、拉压杆。2.薄壁结构——结构的厚度远小于其它两个尺度,平面为板曲面为壳,如楼面、屋面等。 3.实体结构——结构的三个尺度为同一量级,如挡土墙、堤坝、大块基础等。 三、课程研究的对象 ?材料力学——以研究单个杆件为主 ?弹性力学——研究杆件(更精确)、板、壳、及块体(挡土墙)等非杆状结构 ?结构力学——研究平面杆件结构 四、课程的任务 1.研究结构的组成规律,以保证在荷载作用下结构各部分不致发生相对运动。探讨结构的合理形式,以便能有效地利用材料,充分发挥其性能。 2.计算由荷载、温度变化、支座沉降等因素在结构各部分所产生的内力,为结构的强度计算提供依据,以保证结构满足安全和经济的要求。 3.计算由上述各因素所引起的变形和位移,为结构的刚度计算提供依据,以保证结构在使用过程中不致发生过大变形,从而保证结构满足耐久性的要求。 §1-2 结构计算简图 一、计算简图的概念:将一个具体的工程结构用一个简化的受力图形来表示。 选择计算简图时,要它能反映工程结构物的如下特征: 1.受力特性(荷载的大小、方向、作用位置) 2.几何特性(构件的轴线、形状、长度) 3.支承特性(支座的约束反力性质、杆件连接形式) 二、结构计算简图的简化原则 1.计算简图要尽可能反映实际结构的主要受力和变形特点 ,使计算结果安全可靠; .............. 。 2.略去次要因素,便于分析和计算 ....... 三、结构计算简图的几个简化要点 1.实际工程结构的简化:由空间向平面简化 2.杆件的简化:以杆件的轴线代替杆件 3.结点的简化:杆件之间的连接由理想结点来代替 (1)铰结点:铰结点所连各杆端可独自绕铰心自由转动,即各杆端之间的夹角可任意改变。不存在结点对杆的转动约束,即由于转动在杆端不会产生力矩,也不会传递力矩,只能传递轴力和剪力,一般用小圆圈表示。 (2)刚结点:结点对与之相连的各杆件的转动有约束作用,转动时各杆间的夹角保持不变,杆端除产生轴力和剪力外,还产生弯矩,同时某杆件上的弯矩也可以通过结点传给其它杆件。(3)组合结点(半铰):刚结点与铰结点的组合体。 4.支座的简化:以理想支座代替结构与其支承物(一般是大地)之间的连结 (1)可动铰支座:又称活动铰支座、链杆支座、辊轴支座,允许沿支座链杆垂直方向的微小移动。沿支座链杆方向产生一个约束力。 (2)固定铰支座:简称铰支座,允许杆件饶固定铰铰心有微小转动。过铰心产生任意方向的 高中数学第四章-三角函数知识点汇总 1. ①与α(0°≤α<360°)终边相同的角的集合(角α与角β的终边重合):{}Z k k ∈+?=,360|αββ ②终边在x 轴上的角的集合: {}Z k k ∈?=,180| ββ ③终边在y 轴上的角的集合:{}Z k k ∈+?=,90180| ββ ④终边在坐标轴上的角的集合:{}Z k k ∈?=,90| ββ ⑤终边在y =x 轴上的角的集合:{}Z k k ∈+?=,45180| ββ ⑥终边在x y -=轴上的角的集合:{}Z k k ∈-?=,45180| ββ ⑦若角α与角β的终边关于x 轴对称,则角α与角β的关系:βα-=k 360 ⑧若角α与角β的终边关于y 轴对称,则角α与角β的关系:βα-+= 180360k ⑨若角α与角β的终边在一条直线上,则角α与角β的关系:βα+=k 180 ⑩角α与角β的终边互相垂直,则角α与角β的关系: 90360±+=βαk 2. 角度与弧度的互换关系:360°=2π 180°=π 1°=0.01745 1=57.30°=57°18′ 注意:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零. 、弧度与角度互换公式: 1rad =π 180°≈57.30°=57°18ˊ. 1°= 180 π≈0.01745(rad ) 3、弧长公式:r l ?=||α. 扇形面积公式:2 11||2 2 s lr r α= = ?扇形 4、三角函数:设α是一个任意角,在α的终边上任取(异于原点的)一点P (x,y )P 与原点的距离为r ,则 r y =α sin ; r x = αcos ; x y = α tan ; y x = α cot ; x r = α sec ;. y r = α csc . 5、三角函数在各象限的符号:(一全二正弦,三切四余弦) 正切、余切 余弦、正割 正弦、余割 6、三角函数线 正弦线:MP; 余弦线:OM; 正切线: AT. 7. 三角函数的定义域: SIN \C O S 三角函数值大小关系图 1、2、3、4表示第一、二、三、四象限一半所在区域 (3) 若 o高中部分三角函数知识点总结
三角函数知识点归纳
结构力学主要知识点归纳
人教版 高中数学必修4 三角函数知识点
高一三角函数知识点梳理总结
结构力学各章重要内容、知识点、难点
高中数学三角函数知识点总结(珍藏版)
三角函数知识点
高中数学必修三角函数知识点与题型总结
结构力学知识点总结
结构力学最全的知识点梳理及学习方法
高中数学三角函数知识点