计算机视觉成象的非线性畸变研究与综述
非线性光学成像技术的研究进展与应用

非线性光学成像技术的研究进展与应用随着科技的发展,非线性光学成像技术的应用越来越广泛,从原子物理研究到生物医学,都涉及到这一领域。
本文将从理论和应用两个方面介绍非线性光学成像技术的研究进展及其应用。
一、非线性光学成像技术的理论非线性光学成像技术是指在高强度激光作用下,光与物质相互作用而产生非线性光学效应,在这种效应下,光学的响应变得非线性。
其中,二次谐波(second harmonic generation, SHG)和二次倍频(second harmonic imaging microscopy, SHIM)是两个最常用的非线性光学成像技术。
SHG是指当一个物体被光照射时,它会产生一个频率为两倍原始光子频率的二次谐波。
常见的应用包括晶体结构和非中心对称分子体系的表征。
SHG是二阶非线性光学效应,按照居里对称规律,只有非中心对称的分子具有二阶非线性效应。
SHIM则是通过测量样品中由二次谐波信号产生的信号来获得二维和三维的影像。
相较于传统的荧光成像,在分辨率、深度和反射率方面都有更好的表现。
SHIM技术广泛应用于生物医学、高分子化学和材料学等领域。
二、非线性光学成像技术的应用1. 生物医学生物医学领域是非线性光学成像技术的广泛应用领域之一。
在神经科学研究中,SHG成像可以帮助研究蛋白质聚集和空间结构,以及蛋白质与膜的相互作用。
同时,SHIM技术可以应用于体内免疫组织成像和细胞内结构成像。
另外,非线性光学成像技术还可以应用于体内癌症诊断。
在组织学分析中,癌细胞和正常细胞具有不同的非线性光学相位,可以通过SHIM技术进行高分辨率成像,并帮助医生诊断癌症类型。
2. 材料学非线性光学成像技术可以应用于材料科学领域的表征和研究。
其中,SHG成像被广泛应用于纳米颗粒表征和介电材料的二阶非线性效应测量。
同时,在光学损伤和激光制造领域,非线性光学成像技术可以帮助研究光诱导损伤机制以及材料的光学响应。
3. 非线性光学显微镜非线性光学显微镜(nonlinear optical microscopy, NLOM)是近年来发展起来的新型显微技术,其与传统显微技术相比,具有更高的透过深度和分辨率。
计算机视觉文献综述

计算机视觉文献综述计算机视觉是一种利用计算机技术对图像和视频进行处理、分析、理解和解释的技术。
它可以模拟人类视觉系统,对图像进行分类、分割、检测、跟踪、重建等操作,具有成像能力和智能处理能力。
在人工智能和机器人技术领域中有着广泛的应用前景。
近年来,计算机视觉领域的研究日益深入。
其中重要的一项研究是目标检测。
目标检测是指在图像或视频中自动地检测和定位特定对象,这些对象可以是车辆、行人、人脸等。
它是计算机视觉中的一个基础技术,具有广泛的应用价值。
传统的目标检测方法主要是基于特征提取和分类的,如Haar、HOG、SIFT等特征。
但这些方法存在着计算复杂性高、准确性差、运算速度慢等问题。
因此,近年来出现了一些基于深度学习的目标检测算法,如Faster R-CNN、YOLO、SSD等,它们在准确性、速度和可扩展性上都有了极大的提升。
此外,在计算机视觉领域中,人脸识别也是一个热门研究方向。
人脸识别是指根据人脸的特征信息,对识别出的人脸进行辨认和验证,是一项人机交互中重要的技术。
人脸识别技术已经被广泛应用于公共安全、金融、机场、银行等领域。
近年来,基于深度学习的人脸识别算法逐渐成为主流。
主要的算法包括FaceNet、DeepID、VGGFace 等。
这些算法的准确性已经超过了传统的基于手工特征的方法,而且计算速度也更快。
在计算机视觉领域中,深度学习已经成为一个重要的方法。
深度学习是一种多层次的神经网络模型,可有效地处理大数据和高维数据。
深度学习中的卷积神经网络(CNN)已经成为图像处理和计算机视觉中的一种主流算法。
其优点在于可以自动地提取图像中的特征,并能有效解决传统方法中存在的问题。
总之,计算机视觉技术的发展已经成为人工智能和机器人技术的重要组成部分。
目标检测、人脸识别等技术已经被广泛应用,随着深度学习的发展,计算机视觉领域中将会有更多的创新和突破。
计算机视觉成象的非线性畸变研究与综述

计算机视觉成象的非线性畸变研究与综述
姜大志;郁倩;王冰洋;丁秋林
【期刊名称】《计算机工程》
【年(卷),期】2001(027)012
【摘要】介绍了计算机视觉中光学镜头成象非线性畸变的原理及几种变形模型,提出产生了这种变形主要原因是镜片间的轴向间距的偏差.回顾并总结了求解非线性畸变参数的4种方法,介绍各种方法的基本思想和相应的特点,分析、比较了各种方法的优缺点.
【总页数】3页(P108-110)
【作者】姜大志;郁倩;王冰洋;丁秋林
【作者单位】南京航空航天大学324信箱,南京,210016 盐城工学院,盐城,224003;南京航空航天大学324信箱,南京,210016 盐城工学院,盐城,224003;南京航空航天大学324信箱,南京,210016;南京航空航天大学324信箱,南京,210016
【正文语种】中文
【中图分类】TP391
【相关文献】
1.摄像机镜头非线性畸变校正方法综述 [J], 杨必武;郭晓松
2.基于小波变换的非线性负载畸变电能计量研究 [J], 卢世祥;阙华坤;林国营
3.半球全景成象系统中的非线性映射研究 [J], 姚炜勇;程惠全;朱方明;杨国光
4.非线性负载条件下衡量功率畸变率的方法研究 [J], 亢梦婕;徐晔;王金全;严豪杰;陈凯
5.车载电缆终端非线性应控管改善畸变电场分布的优化研究 [J], 郭蕾;李丽妮;白龙雷;车雨轩;余洋;周利军
因版权原因,仅展示原文概要,查看原文内容请购买。
双目立体视觉系统的非线性摄像机标定技术
越来越 高。在钢板表面三维重构及智能检测中 , 要利用二维图 像获取钢板表面特征的尺寸 、 位置 、 深度等三维信息 , 首先要确
几何模 型 , 分析 了成像模 型 的 内外参 数及针 孔模 型的局 限性 , 出改进 的双 目立体视 觉 系统摄像 机 两步标 定方 提
法 。利 用 H C AL ON标 定板及 函数库 平 台, 用亚像素 精度 的边缘提取 和 椭 圆拟合 算 法精 确获取 标 定点 , 采 以建立
像 点 与空 间点 的对应 关 系 , 对标定参数 进行 非线性 优化 。 实验 证 明该 标 定 算法 灵 活准确 , 并 并具 有 良好 的 可扩
t n dtecl rt nm r s n e r ie em rs n e rj t n i e sbpx l rc ee g o t r e c o a e ai ai ak d d t m n dt ak d t i poe i sw t t u —i e i d e cno t t n i h b o a e h a h r co hh ep s ud ei
d i1 . 9 9 ji n 10 —6 5 2 1 .9 0 5 o :0 n a a r air t n meh d o io u a tro vso y tm ni e rc me a c l ai to fb n c lrsee iin s se b o
Absr c ta t: Un rt e r q r me so n sra n p c in a c r c n e ltme a lc to de h e uie nt fi du tili s e to c u a y a d r a i ppi ain,t i a r b o g tfr r n hs p pe r u h owad a i r v d t se a r ai r t n me h d frbno lrse e iin s se a e nt e b n c lri g n e mer d l mp o e wo—tp c me ac lb ai t o o i cua tr ovso y t msb s d o h i o u a ma i gg o ty mo e o o h r a s a fte a e c n CCD me a wi he u i g o ca r t t sn fLENZ d soto d 1 nay e ft e paa t r nd t e lmiai n ft e h itrin mo e .a l z d o h rme e a h i tto s o h s pnh l d 1 Usn i oe mo e . i g HAL CON lna ai r t a d whih we ec r ua a g t ft wa ra n u ci n i a ,o p a rc lb ai bo r c r ic lrtre so wo— y ar y a d f n to sl r on bry b—
计算机视觉成象的非线性畸变研究与综述
1 相机成象模型及图象畸变模型
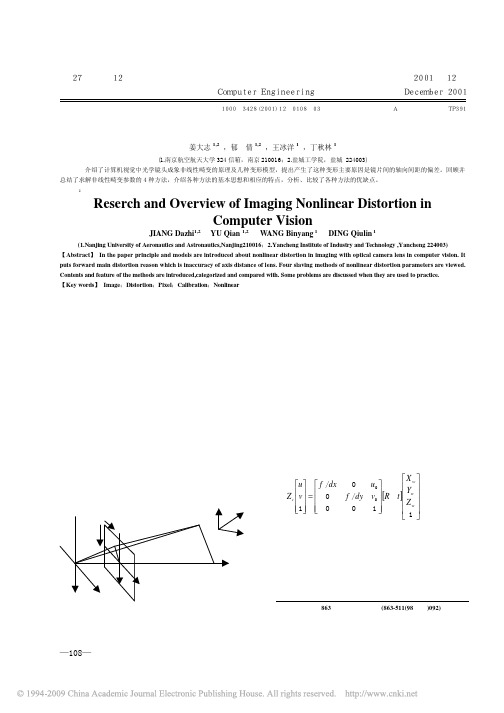
1.1 坐标系及成象模型 相机的光学成象过程可以分为 3 个步骤,隶属于 4 个 坐标系。这 4 个坐标系(图 1)分别为: Zw
Yw U P
在计算机视觉的研究和应用中, 数字图象的质量是相当 重要的,尤其是在三维重构和运动判别等定量分析的场合。 由于数字图象在成象过程中存在着非线性畸变,使得逆向视 觉过程的研究变得不适应和十分困难。目前使用的成象设备 (以下简称相机)主要有:胶片相机、摄象机、数码相机、数 码摄象机。它们都是利用光学镜头及针孔模型的原理实现成 象的,只是成象后的图象信息载体不同而已。由于光学镜头 的结构与理想的针孔模型存在着差异,使得图象中象素的实 际坐标与之对应的理论坐标并不一致,这就是非线性畸变引 起的误差。产生这种非线性畸变是由相机本身的制造误差所 致。掌握相机在成象过程中产生这种非线性畸变的规律是计 算机视觉研究的一个重要内容。随着 CCD 制造技术的不断 提高,使得数字图象的分辨率越来越高,图象中的非线性畸 变的相对影响也越来越突出。
计算机视觉成象的非线性畸变研究与综述
姜大志 1,2 ,郁
摘
倩 1,2 ,王冰洋 1 ,丁秋林 1
(1.南京航空航天大学 324 信箱,南京 210016;2.盐城工学院,盐城 224003) 要:介绍了计算机视觉中光学镜头成象非线性畸变的原理及几种变形模型,提出产生了这种变形主要原因是镜片间的轴向间距的偏差。回顾并 总结了求解非线性畸变参数的 4 种方法,介绍各种方法的基本思想和相应的特点,分析、比较了各种方法的优缺点。 关键词 :图象;畸变;象素;标定;非线性
第 27 卷 第 12 期 计 算 机 工 程 20 01 年 12 月 Vol.27 №12 Computer Engineering December 2001 ・多媒体技术及应用・ 文章编号: 1 0 0 0 — 3 4 2 8 ( 2 0 0 1 ) 1 2 — 0 1 0 8 — 0 3 文献标识码: A 中图分类号: T P 3 9 1
摄像机镜头非线性畸变校正方法综述
第10卷 第3期2005年3月中国图象图形学报Journal of I m age and GraphicsVol .10,No .3M ar .,2005收稿日期:2004203220;改回日期:2004212214第一作者简介:杨必武(1976~ ),男,2001年获第二炮兵工程学院兵器发射理论与技术专业工学硕士学位,现为该专业在读博士研究生。
主要从事图像识别、计算机视觉及应用研究。
近年来发表论文20余篇,获军队科技进步一、三等奖各1项。
E 2mail:ybw202@摄像机镜头非线性畸变校正方法综述杨必武 郭晓松(第二炮兵工程学院202教研室,西安 710025)摘 要 由于加工误差和装配误差的存在,摄像机光学系统与理想的小孔透视模型有一定的差别,致使物体点在摄像机图像平面上实际所成的像与理想成像之间存在不同程度的非线性光学畸变。
为了提高图像检测、模式匹配等定量分析的准确性,必须对这一类畸变进行修正。
近年来,国内外学者就此问题进行了大量的研究,为了使人们概略地了解该领域的研究现状,为此首先介绍了摄像机成像模型与镜头非线性畸变模型,并回顾总结了摄像机镜头非线性畸变校正方法,然后进一步提出从原理上将这些方法分为基于控制对象的方法和基于模式的方法两大类,最后分析比较了各种方法的优缺点。
关键词 摄像机 镜头 非线性畸变 校正中图法分类号:TP391.41 T N942.2 文献标识码:A 文章编号:100628961(2005)0320269206O verv i ew of Non li n ear D istorti on Correcti on of Cam era L en sY ANG B i 2wu,G UO Xiao 2s ong(The 202Teaching and Searching Section of the Second A rtillery Engineering College,X i ’an 710025)Abstract Because of having p r ocessing err or and assembling err or the difference exists in the model of the ca mera op tical syste m and p inhole model,which results t o nonlinear dist orti on bet w een real i m age and ideal i m age t o s ome extent .To i m p r ove the accuracy of such quantitative analysis as i m age measuring and pattern matching,it must be corrected .Recently,many scholars have a l ot of research on this p r oble m.To open the p resent state of this field before everyone,the models about ca mera i m aging and lens nonlinear dist orti on are intr oduced,and the correcti on methods of nonlinear dist orti on of ca mera lens are vie wed,which are divided int o the method based on contr olling object and the method based on pattern .Finally,the app licati on p r oble m s are analyzed and compared .Keywords ca mera,lens,nonlinear dist orti on,correcti on1 引 言目前,计算机视觉系统正在工业、交通、医疗、军事等领域得到广泛应用,为了获取大视场的景物视频信息,人们常常使用短焦距摄像机镜头。
计算机视觉技术应用研究综述
计算机视觉技术应用研究综述摘要:随着计算机技术和算法的不断发展,计算机视觉技术在各个领域的应用越来越广泛。
本文对计算机视觉技术的基本原理进行了介绍,并分析了其在图像识别、目标检测、人脸识别、机器人视觉等领域的应用研究现状和发展趋势。
文章旨在全面、深入地了解计算机视觉技术的应用,为相关领域的研究工作提供参考和指导。
一、引言计算机视觉技术是指利用计算机和相关技术模拟人类视觉系统,对图像和视频信息进行处理、分析和理解的一门学科。
计算机视觉技术广泛应用于工业、医疗、交通、安防等各个领域,具有重要的理论研究和实际应用价值。
二、计算机视觉技术的基本原理计算机视觉技术的基本原理包括图像获取和预处理、特征提取和描述、目标检测和识别等方面。
图像获取和预处理是计算机视觉技术的起始阶段,其目的是获取清晰、准确的图像数据,为后续处理提供基础。
特征提取和描述是计算机视觉技术的核心,通过对图像或视频进行特征分析,提取出物体的形状、纹理、颜色等特征信息。
目标检测和识别是计算机视觉技术的关键任务之一,通过对特定对象进行识别和分类,实现对图像或视频的自动分析和理解。
三、计算机视觉技术在图像识别领域的应用研究图像识别是计算机视觉技术最早应用的领域之一,主要包括图像分类、图像检索和图像分割等任务。
在图像分类方面,计算机视觉技术能够通过对图像进行特征提取和特征匹配,实现对图像的自动分类和识别。
在图像检索方面,计算机视觉技术能够通过对图像进行相似性匹配和匹配度评估,实现对图像库中的图像进行快速检索。
在图像分割方面,计算机视觉技术能够将图像中的目标区域进行有效分割,为目标识别和目标跟踪提供准确、可靠的信息。
四、计算机视觉技术在目标检测领域的应用研究目标检测是计算机视觉技术的重要应用领域之一,主要涉及目标的定位和识别。
在目标检测方面,计算机视觉技术能够通过对图像或视频进行特征分析和检测算法的应用,实现对目标的自动检测和定位。
目标检测技术主要包括基于传统的特征提取和机器学习方法,以及基于深度学习的端到端目标检测方法。
《2024年计算机视觉技术应用研究综述》范文
《计算机视觉技术应用研究综述》篇一一、引言计算机视觉技术是人工智能领域的重要组成部分,它以模拟人类视觉感知为核心,通过对图像、视频等视觉信息的处理和分析,实现自动化识别、分析和理解。
随着计算机硬件的飞速发展以及深度学习等算法的持续优化,计算机视觉技术在众多领域中得到了广泛应用。
本文将对计算机视觉技术的基本原理、发展历程、应用领域及研究现状进行综述。
二、计算机视觉技术的基本原理与发展历程计算机视觉技术是通过模拟人眼感知外界的机制,利用计算机及相关设备对图像、视频等视觉信息进行采集、处理、分析和理解的技术。
其基本原理包括图像获取、预处理、特征提取、图像识别等多个阶段。
计算机视觉技术的发展历程可以追溯到上世纪60年代,早期主要依靠图像处理技术对图像进行简单的分析和处理。
随着深度学习等算法的兴起,计算机视觉技术得以快速发展,逐渐实现了对图像的高效识别和理解。
近年来,随着硬件设备的升级和算法的不断优化,计算机视觉技术在识别速度、准确率等方面取得了显著进步。
三、计算机视觉技术的应用领域1. 工业领域:计算机视觉技术在工业领域的应用非常广泛,如机器人视觉、产品质量检测等。
通过计算机视觉技术,可以实现自动化生产线的智能化管理,提高生产效率和质量。
2. 医疗领域:在医疗领域,计算机视觉技术被广泛应用于医学影像分析、病理诊断等方面。
例如,通过深度学习算法对医学影像进行识别和分析,辅助医生进行疾病诊断和治疗。
3. 交通领域:在交通领域,计算机视觉技术被用于智能交通系统、车辆识别等方面。
通过实时监控和识别道路上的车辆和行人,提高交通管理的智能化水平。
4. 军事领域:在军事领域,计算机视觉技术被广泛应用于目标识别、战场监控等方面。
通过高精度的图像识别和分析,提高军事行动的效率和安全性。
5. 其他领域:此外,计算机视觉技术还广泛应用于安防监控、无人驾驶等领域。
在安防监控方面,通过实时监控和识别异常情况,提高安全防范的效率;在无人驾驶方面,通过图像识别和自动驾驶技术,实现车辆的自主驾驶和智能化管理。
《2024年计算机视觉技术应用研究综述》范文
《计算机视觉技术应用研究综述》篇一一、引言计算机视觉技术是人工智能领域的重要组成部分,其通过模拟人类视觉系统,实现对图像、视频等视觉信息的处理、分析和理解。
近年来,随着计算机技术的飞速发展,计算机视觉技术在各个领域得到了广泛应用,包括但不限于安防监控、医疗诊断、自动驾驶、智能机器人等。
本文旨在综述计算机视觉技术的研究现状、应用领域以及未来发展趋势。
二、计算机视觉技术概述计算机视觉技术是一种利用图像处理技术、模式识别技术和人工智能技术等手段,对图像和视频信息进行获取、传输、存储、分析和理解的技术。
其核心技术包括图像处理、特征提取、目标检测、图像识别等。
计算机视觉技术的应用,能够提高人们的生产效率和生活质量,具有重要的应用价值。
三、计算机视觉技术研究现状目前,计算机视觉技术的研究主要集中在以下几个方面:图像处理技术、深度学习算法、三维重建技术等。
其中,深度学习算法在计算机视觉领域的应用最为广泛,如卷积神经网络(CNN)在图像分类、目标检测、人脸识别等领域取得了显著的成果。
此外,随着硬件设备的不断发展,计算机视觉技术的处理速度和精度得到了显著提升。
四、计算机视觉技术应用领域1. 安防监控:计算机视觉技术在安防监控领域的应用主要体现在智能视频监控和人脸识别等方面。
通过智能视频监控系统,可以实现实时监控和预警功能,提高安防系统的效率和准确性。
2. 医疗诊断:计算机视觉技术可以帮助医生实现图像分析、病变检测等功能,提高医疗诊断的准确性和效率。
如计算机辅助诊断系统在肺癌、乳腺癌等疾病的诊断中得到了广泛应用。
3. 自动驾驶:计算机视觉技术是实现自动驾驶的关键技术之一。
通过图像处理和识别技术,可以实现车辆对周围环境的感知和判断,从而实现在复杂道路环境下的自动驾驶。
4. 智能机器人:计算机视觉技术可以帮助机器人实现目标识别、姿态估计等功能,提高机器人的智能化程度和应用范围。
如服务机器人在餐饮、医疗等领域得到了广泛应用。
图像拼接中相机镜头非线性畸变的校正
图像拼接中相机镜头非线性畸变的校正兰海滨;王平;龙腾【期刊名称】《光学精密工程》【年(卷),期】2009(017)005【摘要】为满足大尺寸图像无缝拼接的需要,提出了数字相机镜头非线性畸变的高精度校正方法.分析了现有棋盘格图像特征点检测算法的不足,提出了一种新的基于棋盘格图像结构特征的特征点检测算法.该算法巧妙地利用棋盘格图像的像素点相对于方格交点对称、相对于方格交线反对称这一特点,计算交点附近区域每一像素点的对称度和反对称度,并以此为依据来判定特征点的准确位置.将该算法与多项式变换技术以及双线性插值技术相结合,提出了数字相机图像非线性畸变的精确校正方法.实验结果表明,校正后图像的横向误差均值为0.43个像素,纵向坐标误差均值为0.36个像素.该方法精度高、计算简单,对噪声、透视、畸变等鲁棒性强,便于特征点检测的自动化处理.通过对实际地图图像的校正和拼接处理,证明了该方法的有效性.【总页数】7页(P1196-1202)【作者】兰海滨;王平;龙腾【作者单位】北京理工大学,信息科学技术学院,北京,100081;国防科技大学,电子科学与工程学院,湖南,长沙,410073;北京理工大学,信息科学技术学院,北京,100081【正文语种】中文【中图分类】TP391.4【相关文献】1.面阵热红外相机镜头畸变校正靶标研究 [J], 刘毓博;王义坤;韩贵丞;刘敏;姚波;杨暄;亓洪兴;舒嵘;蔡能斌2.标准图形法求解相机镜头非线性畸变的研究 [J], 姜大志;孙俊兰;郁倩;丁秋林3.二维PSD的非线性畸变校正算法 [J], 王静仪;王兴东;刘钊;曾镛;仄士春4.光学成像系统中非线性畸变的数字校正方法分析 [J], 石毅;毕斯琴5.基于非线性样条插值的大广角相机畸变校正方法 [J], 李银国;程诚因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Yw U P
图 1 4 个坐标系 基金项目:国家 863 示范工程资助项目 (863-511(98 通字 )092)
u f / dx Zc v = 0 1 0
X w 0 u0 Y w [ ] f / dy v0 R t Zw 0 1 1
在计算机视觉的研究和应用中, 数字图象的质量是相当 重要的,尤其是在三维重构和运动判别等定量分析的场合。 由于数字图象在成象过程中存在着非线性畸变,使得逆向视 觉过程的研究变得不适应和十分困难。目前使用的成象设备 (以下简称相机)主要有:胶片相机、摄象机、数码相机、数 码摄象机。它们都是利用光学镜头及针孔模型的原理实现成 象的,只是成象后的图象信息载体不同而已。由于光学镜头 的结构与理想的针孔模型存在着差异,使得图象中象素的实 际坐标与之对应的理论坐标并不一致,这就是非线性畸变引 起的误差。产生这种非线性畸变是由相机本身的制造误差所 致。掌握相机在成象过程中产生这种非线性畸变的规律是计 算机视觉研究的一个重要内容。随着 CCD 制造技术的不断 提高,使得数字图象的分辨率越来越高,图象中的非线性畸 变的相对影响也越来越突出。
(1)
—108—
(1)世界坐标系 — 根据自然环境所选定的坐标系, 坐标 用 Xw ,Yw ,Zw 表示。
作者简介:姜大志(1958 ~) ,男,博士生,副教授,主研方向:计算 机 视 觉 、CAD/CAM/CIM/CIS ;郁 倩,硕士生;王冰洋,博士生;丁 秋林,博导 收稿日期:2 0 0 1 —0 3 —1 9
(2)图象坐标系 — 坐标原点在 CCD 图象平面的中心, X 轴、Y 轴分别为平行于图象平面的两条垂直边,Z 轴与相 机光轴重合,坐标用 x,y 表示。 (3)光心坐标系 — 以相机的光心为坐标原点,X 轴、Y 轴分别平行于图象坐标系的 X 轴和 Y 轴,相机的光轴为 Z 轴,坐标用 Xc ,Yc ,Zc 表示。 (4)象素坐标系 — 坐标原点在 CCD 图象平面的左上 角,U 轴、V 轴分别平行于图象坐标系的 X 轴和 Y 轴,坐标 用 u ,v 来表示,且为离散的整数值。 3 个步骤分别将世界坐标系中的信息(如空间点 P)转换 到光心坐标系,再由光心坐标系映射到图象坐标系,最后由 图象坐标系转换到象素坐标系。 光学成象的理论模型是针孔模型。根据这个模型,由光 心坐标系向图象坐标系的转换过程符合中心影射或透视投 影,可用齐次坐标与矩阵表示:
纳起来主要有 4 种方法。以下分别介绍这 4 种方法。 (1)CCD 的制造误差,使得象素点间距 dx、dy 不完全相同。 (1)直接非线性最小优化法 这种方法是利用实际空 (2)镜头中的镜片的曲面误差。 间的控制点与其对应的图象象素坐标,利用空间点与图象平 (3)镜头中各镜片间的轴向间距。 面点之间的映射关系,建立一个包含成象相机的内部、外部 上述各种因素都是图象产生非线性畸变的原因,但它们 参数和镜头的畸变参数的方程组。选择一组待求参数的初始 各自的影响程度不同,实践证明上述影响因素中以镜头镜片 值,同时建立一个残差目标检验函数,设定目标残差的最小 组合间距误差产生的变形最为严重,其次是各镜片本身的曲 值,进行迭代运算。用这种方法求解的变形包涵了各种类型 线误差的影响。 图 2、 图 3 是同一相机(olympus C-2500l 的畸变, 可以得到较为精确的解(包括相机的内外参数和畸变 数码相机)分别在焦距为 28mm 和 9.2mm 时拍摄的同一方 参数)。 但需要一组较为接近精确解的初始值, 否则很难有满 格图的照片,由图 2、图 3 可见,图 2 中的变形使直线变成 意的结果。建立方程组考虑的因素多,把诸多的复杂因素都 了凹曲线,而图 3 中的变形使直线变成了凸曲线。 渗和在一起,使得方程组和算法过程都很复杂,方程组中的 未知参数至少有 17 个之多,而且所使用的相机、辅助设施 和测量过程都有相当高的要求。这种方法在早期的照相测量 学中有所应用,计算机视觉中应用较少。 (2)基于 RAC 的两步法 两步方法是仅考虑有径向变 形而无切向变形的条件下进行的。也是通过已知点的空间坐 标和其对应的象素坐标,建立一组方程组。与上述方法不同 的是,它的求解过程是通过两步运算完成。第一步在不考虑 非线性畸变的条件下,通过求解一个线性方程组获得相机的 主要外部参数(除世界坐标系到光心坐标系在 Zc 方向的位移 图 2 焦距为 2 8 mm 时拍摄的照片 图 3 焦距为 9.2mm 时拍摄的照片 外的其他外部参数)和比例系数。 第二步首先将第一步中的结 实际上在考虑图象非线性变形的同时应该考虑 CCD 象 果作为已知参数,不考虑图象的畸变,求出有效焦距和世界 素点间距 dx、dy 的大小。只有当图象的非线性变形量超过 坐标系的 Zc 方向位移的近似值, 然后再考虑图象畸变, 将上 dx、dy 才有研究的意义。随着 CCD 制造技术的发展 CCD 述解得的所有参数作为已知参数, 进一步求出有效焦距和 Zc 的象素值越来越大,象素点间距也变得越来越小,图象中的 的精确解以及变形系数 k1、k2。在这种方法中所涉及到的图 非线性变形在计算机视觉的研究中就显得越为重要。当然随 象坐标系的原点(即光轴与 CCD 平面的交点)在象素坐标系 着相机的镜头制造质量的提高,镜头的这种非线性变形量也 中的坐标,一般不与图象中心点重合,采用图象中心点坐标 在减小。上述各项因素产生的非线性变形综合效果可用以下 代替图象坐标系的原点坐标, 对运算结果的精度影响很小[6]。 的数学模型来表示: 这种方法运算过程简洁、速度快。不足之处是只能求得径向 ( 2 2 2 2 2 2 变形系数,在象素分辨率较高时,相应的运算精度就显得比 δ x = k1 x (x + y ) + ( p1 (3 x + y ) + 2 p 2 xy ) + s1 (x + y ) (2) 较低了。 δ y = k 2 y (x 2 + y 2 ) + ( p 2 (3 x 2 + y 2 ) + 2 p1 xy ) + s 2 (x 2 + y 2 ) 式 (3)混合法 这种方法不需要设定所求参数的初始近 式中 δx、 δy 分别为图象象素点在图象坐标系中 x、y 方向的 似值,同时也能考虑到图象的径向变形和切向变形。公式(2) 变形量,x、y 分别是图象坐标系中的象素点的坐标,k1、 的变形模型可改写成: k2、p1、p2、s1、s2 分别为变形系数。上式中的变形量可分 为三部分, 第一部分称为径向畸变, 第二部分称为离心畸变, δ x = ( g 1 + g 3 )x 2 + g 4 xy + g1 x 2 + k1 x x 2 + y 2 (4) 第三部分称为薄棱镜畸变。一般在应用中仅取第一部分的畸 δ y = g 2 x 2 + g 3 xy + ( g 2 + g 4 ) y 2 + k1 x 2 + y 2 变,这部分的变形已能足够描述非线性畸变,文献[5]指出, 由于在考虑非线性畸变时,相机定标需要使用非线性优化算 求解参数被分成两部分,一部分为相机的内部和外部参 法, 引入过多的非线性参数(如上述模型中的第二项和第三项) 数用向量 M 表示, 往往不仅不能提高精度,反而引起解的不稳定。由此可得: M=(U0,V0,fx,fy,T,α,β,γ)T (5) x = x(1 + k1r 2 ) 式中 fx、fy 分别是 x、y 方向的有效焦距,T(Xc,Yc,Zc)、α、 (3) 2 β、 γ是世界坐标系向光心坐标系转换时在 3 个坐标轴方向的 y = y (1 + k 2 r ) 2 2 2 位移和转角。另一部分为变形参数用向量 D 表示, 式中 r = x + y , x 和 y 分别是与实际图象中的坐标 D=(k1,g1,g2,g3,g4) (6) 为 x 和 y 相对应的变形校正后的坐标。 从公式(3)中可见, 从 建立一个误差目标函数 F(Ω,ω,M*,D*),其中Ω为一组三 光心与象平面的交点发出的径向直线,在图象发生非线性畸 维空间点的坐标,ω为与上述一组三维空间点所对应的图象 变前后仍保持其直线的性质不变,即基于 RAC(Radial 点的坐标,M*、D*分别为 M、D 在运算过程中的参数组。设 alignment constraint)非线性畸变。由于非线性畸变的数 定一个误差目标值: 学模型的简化和它的 RAC 特性,大大地方便了相机非线性畸 F*=min F (Ω,ω,M,D) (7) 变的求解和图象的校正。 这种方法的运算过程如图 4。 2 非线性畸变参数的求解 这种方法可以获得比较好的结果,但需要迭代运算,过 目前对相机镜头非线性畸变参数的求解方案有多种, 归
计算机视觉成象的非线性畸变研究与综述
姜大志 1,2 ,郁
摘
倩 1,2 ,王冰洋 1 ,丁秋林 1
(1.南京航空航天大学 324 信箱,南京 210016;2.盐城工学院,盐城 224003) 要:介绍了计算机视觉中光学镜头成象非线性畸变的原理及几种变形模型,提出产生了这种变形主要原因是镜片间的轴向间距的偏差。回顾并 总结了求解非线性畸变参数的 4 种方法,介绍各种方法的基本思想和相应的特点,分析、比较了各种方法的优缺点。 关键词 :图象;畸变;象素;标定;非线性
Reserch and Overview of Imaging Nonlinear Distortion in Computer Vision
JIANG Dazhi1,2 ,YU Qian 1,2 ,WANG Binyang 1 ,DING Qiulin 1
(1.Nanjing University of Aeronautics and Astronautics,Nanjing210016; 2.Yancheng Institute of Industry and Technology ,Yancheng 224003) 【 Abstract】 In the paper principle and models are introduced about nonlinear distortion in imaging with optical camera lens in computer vision. It puts forward main distortion reason which is inaccuracy of axis distance of lens. Four slaving methods of nonlinear distortion parameters are viewed. Contents and feature of the methods are introduced,categorized and compared with. Some problems are discussed when they are used to practice. 【 Key words】 Image; Distortion; Pixel; Calibration; Nonlinear