研控步进电机YKA2404S说明书
DKC一Y240智能步进伺候电机控控制器使用说明书
DKC一Y240智能步进伺候电机控控制器使用说明书DKC一Y240智能步进伺候电机控控制器是 DKC公司生产的一款智能步进电机控制器,具有体积小、重量轻、控制灵活、方便维护和节能等特点。
其主要参数如下:地址:本控制器主要由1个电机控制盒、1个步进驱动控制器;功能:支持步数设置,最多可设置3组步数;状态:定时、断电保护状态;通讯接口:网口连接。
产品特点:采用直流调速的控制方式,具有速度快、响应及时,无电流积点保护、低电压无干扰等特点;适合于小型的智能步进电机。
1.控制器应符合以下条件:a)控制器应具有过载保护、欠电流保护、过载报警等功能;b)控制器应具有定时功能、断电保护功能;c)控制器应能够根据使用需要调整参数;d)控制器应具有与控制器参数直接相关的软件功能(如通信接口、网口等);e)控制器应具有远程操作功能;f)控制盒中应有良好的温度和湿度条件。
e)控制器中应有良好的通风设备。
2.控制盒连接电源必须接在低电压无干扰的地方。
并保证外部电源正常。
如遇到外部电源异常断电,应先断开所有电源线,待异常恢复后再重新接上。
外部电源不允许接入控制盒及其它外部设备。
如有接线要求,请使用专用接线盒进行接线。
禁止用任何电线与其它设备连接及焊接。
注意:(1)不要接电源线上所有带金属外壳接电源。
(2)不要将电压过高或过低。
(3)不要在现场使用过低或过高的电源和开关设备。
(4)应保持现场清洁(如有污垢应及时用清洁)在使用过高或过低电源和开关设备时要采取措施使输出电压不超过额定电压的90%甚至更高,并尽量保持在一个范围内(见图1-1)。
3.所有步进电机应在无任何信号的情况下正常运行,并能在控制盒内直接进行控制。
a.若驱动电流大于等于额定电流,则在启动电机时应先接通电源,待电源正常后再启动电机。
b.若不能正常启动电动机,则应先将控制盒的各档位合上再启动。
c.当系统检测到需要运行过程出现异常时,要及时断开各电源。
d.如果是低速运行,则在启动到定速运转期间要先接通主电源,待其完全断开后再启动电机。
步进电机说明书

2.4
1300
2.6
86BYG250B-03 2/4 4.3 2.5 1.7 9
3.2
2.4
1300
2.6
86BYG250B-04 2/4 5.4 2
2.7 15
3.2
2.4
1300
2.6
86BYG250C-01 2/4 2
7
0.29 2
4.8
3.6
1900
3.8
86BYG250C-02 2/4 4
2.2/1 2.2/2 2/4 1.5/6 1.2/8 1/10
90BYG250B 0.9º
4.5/1 4.5/2 3.1/4 2.0/6 1.4/8 0.6/10
90BYG250C 0.9º
6/1 5.6/2 4.5/4 3.2/6 2/8 1/10
驱动器 2HB1108MAE 2HB806MAE 2HB808MA
相 电 压 电 流 电 阻 电 感 保 持 转 定位转矩 转动惯量 机 身 长
数V
A
Ω
mH 矩 N.M Kg.cm
g.cm²
mm
2 9.6 0.4 24
36
0.17
0.15
20
25
2 12 0.4 30
37
0.25
0.20
38
34
2
8
0.8 10
17
0.32
0.22
57
40
2 3.84 1.2 3.2
转动惯量 g.cm² 60 145 230
重量 kg
0.45 0.65 1.0
机身长 mm 41 56 76
外型尺寸
接线图
注:轴为单扁丝,也可根据客户需要定做
步进电机控制方法
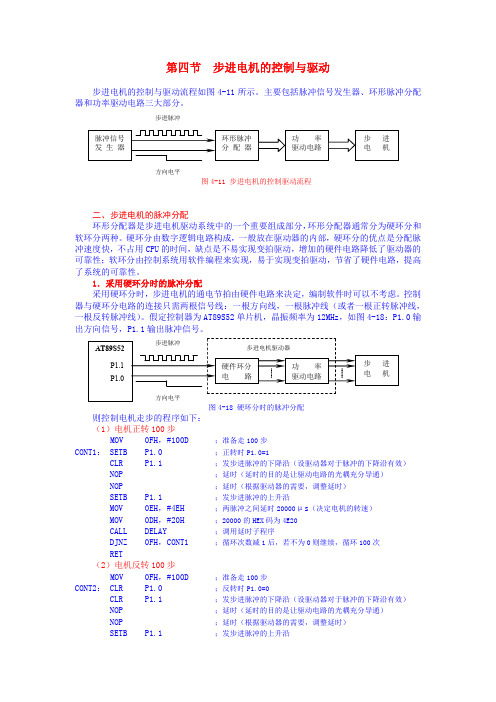
第四节 步进电机的控制与驱动步进电机的控制与驱动流程如图4-11所示。
主要包括脉冲信号发生器、环形脉冲分配器和功率驱动电路三大部分。
步进脉冲方向电平图4-11 步进电机的控制驱动流程二、步进电机的脉冲分配环形分配器是步进电机驱动系统中的一个重要组成部分,环形分配器通常分为硬环分和软环分两种。
硬环分由数字逻辑电路构成,一般放在驱动器的内部,硬环分的优点是分配脉冲速度快,不占用CPU的时间,缺点是不易实现变拍驱动,增加的硬件电路降低了驱动器的可靠性;软环分由控制系统用软件编程来实现,易于实现变拍驱动,节省了硬件电路,提高了系统的可靠性。
1.采用硬环分时的脉冲分配采用硬环分时,步进电机的通电节拍由硬件电路来决定,编制软件时可以不考虑。
控制器与硬环分电路的连接只需两根信号线:一根方向线,一根脉冲线(或者一根正转脉冲线,一根反转脉冲线)。
假定控制器为AT89S52单片机,晶振频率为12MHz,如图4-18:P1.0输出方向信号,P1.1输出脉冲信号。
则控制电机走步的程序如下:(1)电机正转100步MOV 0FH,#100D ;准备走100步CONT1: SETB P1.0 ;正转时P1.0=1CLR P1.1 ;发步进脉冲的下降沿(设驱动器对于脉冲的下降沿有效)NOP ;延时(延时的目的是让驱动电路的光耦充分导通)NOP ;延时(根据驱动器的需要,调整延时)SETB P1.1 ;发步进脉冲的上升沿MOV 0EH,#4EH ;两脉冲之间延时20000μs(决定电机的转速)MOV 0DH,#20H ;20000的HEX码为4E20CALL DELAY ;调用延时子程序DJNZ 0FH,CONT1 ;循环次数减1后,若不为0则继续,循环100次RET(2)电机反转100步MOV 0FH,#100D ;准备走100步CONT2: CLR P1.0 ;反转时P1.0=0CLR P1.1 ;发步进脉冲的下降沿(设驱动器对于脉冲的下降沿有效)NOP ;延时(延时的目的是让驱动电路的光耦充分导通)NOP ;延时(根据驱动器的需要,调整延时)SETB P1.1 ;发步进脉冲的上升沿MOV 0EH,#4EH ;两脉冲之间延时20000μs (决定电机的转速)MOV 0DH,#20H ;20000的HEX 码为4E20CALL DELAY ;调用延时子程序 DJNZ 0FH,CONT2 ;循环次数减1后,若不为0则继续,循环100次RET2.采用软环分时的脉冲分配如图4-19所示,该系统基于AT89S52单片机,利用扩展的可编程接口芯片8255A 的PB 口送出步进脉冲信号,经过驱动放大后,分别控制X 轴、Z 轴两个三相六拍反应式步进电机激磁绕组的通电顺序,以控制刀架在X、Z 两个方向的运动。
YKD2405PE总线型步进驱动器使用手册说明书
YKD2405PE总线型步进驱动器使用手册版本:V1.1深圳研控自动化科技股份有限公司目录目录 (2)版本修订历史 (1)前言 (2)第1章概述 (3)1.1产品介绍 (3)1.2特性 (3)1.3应用领域 (3)1.4产品命名规则 (4)第2章性能指标 (5)2.1EtherCAT特性 (5)2.2电气特性 (5)2.3使用环境 (6)第3章安装 (7)3.1安装尺寸 (7)3.2安装方法 (7)第4章驱动器端口与接线 (8)4.1接线示意图 (8)4.2端口定义 (9)4.2.1地址拨码 (9)4.2.2状态指示灯 (9)4.2.3EtherCAT通讯端口 (10)4.2.4输入输出端口 (10)4.2.5电机输出端口 (10)4.2.6电源输入端口 (10)4.3输入/输出端口操作 (11)第5章适配电机 (12)5.1电机尺寸 (12)5.2. 技术参数 (13)5.3 电机接线图 (14)第6章驱动器状态指示灯 (15)第7章一般故障排除方法 (16)第8章保修及售后服务 (17)8.1保修 (17)8.2售后服务 (17)YKD2405PE 使用手册 V1.1 版本修订历史版本修订历史YKD2405PE 使用手册 V1.1 前言前言感谢您使用本公司总线型步进驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:第1章概述1.1产品介绍YKD2405PE总线型步进伺服驱动器是在数字型步进驱动器的基础上增加了EtherCAT总线通讯功能,同时支持智能运动控制功能。
研控科技 ESS242-C 系列 总线型步进电机驱动器 使用手册说明书

深圳市研控自动化科技股份有限公司目录前言 (1)1概述 (2)1.1产品介绍 (2)1.2特性 (2)1.3应用领域 (2)1.4产品命名规则 (2)2性能指标 (3)2.1电气特性 (3)2.2使用环境 (3)3安装 (4)3.1安装尺寸 (4)3.2安装方法 (4)4 驱动器端口与接线 (5)4.1接线示意图 (5)4.2接口定义 (6)4.2.1状态指示灯 (6)4.2.2输入/输出端口 (6)4.2.3拨码开关 (6)4.2.4电源端口/通讯端口 (6)4.3输入/输出端口操作 (7)4.4拨码开关设定 (8)5 电机规格及接线 (10)5.1技术规格 (10)6报警排除 (11)7版本修订历史 (12)8修及售后服务 (13)8.1保修 (13)8.2售后服务 (13)前言感谢您使用本公司总线型步进电机驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:本用户手册所述内容仅适用于以下机型:1概述1.1产品介绍ESS242-C系列总线型步进电机驱动器是在数字型步进驱动器传统数字闭环步进驱动器基础上增加了总线通讯及单轴控制器功能。
总线通讯采用CAN总线接口,协议上支持CANopen协议的CiA301及CiA402子协议。
1.2特性⚫新一代32位DSP技术,高性价比、平稳性佳、低噪声、低振动。
⚫采用CAN总线通讯,支持CANopen协议的CiA301及CiA402子协议,最多可挂载15个设备。
⚫CAN总线通讯波特率默认500Kbps。
⚫总线型驱动器可以实现远距离可靠控制,有效解决干扰环境下脉冲丢失的问题。
步进驱动器使用说明书
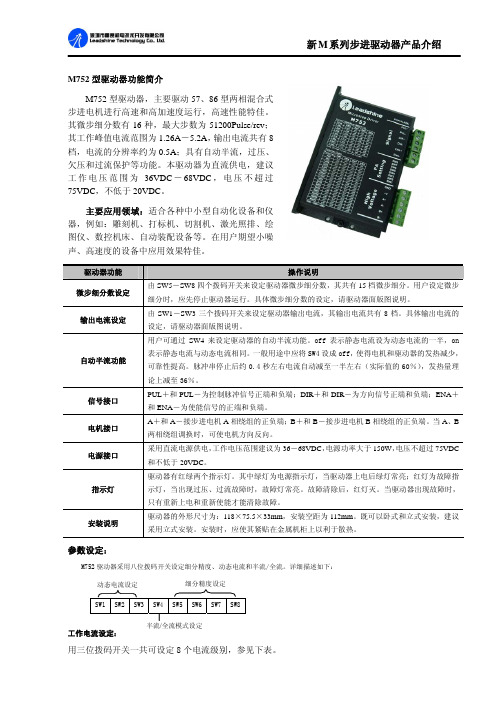
M752型驱动器功能简介M752型驱动器,主要驱动57、86型两相混合式步进电机进行高速和高加速度运行,高速性能特佳。
其微步细分数有16种,最大步数为51200Pulse/rev ;其工作峰值电流范围为1.26A -5.2A ,输出电流共有8档,电流的分辨率约为0.5A ;具有自动半流,过压、欠压和过流保护等功能。
本驱动器为直流供电,建议工作电压范围为36VDC -68VDC ,电压不超过75VDC ,不低于20VDC 。
主要应用领域:适合各种中小型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、自动装配设备等。
在用户期望小噪声、高速度的设备中应用效果特佳。
驱动器功能操作说明 微步细分数设定 由SW5-SW8四个拨码开关来设定驱动器微步细分数,其共有15档微步细分。
用户设定微步细分时,应先停止驱动器运行。
具体微步细分数的设定,请驱动器面版图说明。
输出电流设定 由SW1-SW3三个拨码开关来设定驱动器输出电流,其输出电流共有8档。
具体输出电流的设定,请驱动器面版图说明。
自动半流功能 用户可通过SW4来设定驱动器的自动半流功能。
off 表示静态电流设为动态电流的一半,on表示静态电流与动态电流相同。
一般用途中应将SW4设成off,使得电机和驱动器的发热减少,可靠性提高。
脉冲串停止后约0.4秒左右电流自动减至一半左右(实际值的60%),发热量理论上减至36%。
信号接口 PUL +和PUL -为控制脉冲信号正端和负端;DIR +和DIR -为方向信号正端和负端;ENA +和ENA -为使能信号的正端和负端。
电机接口 A +和A -接步进电机A 相绕组的正负端;B +和B -接步进电机B 相绕组的正负端。
当A 、B两相绕组调换时,可使电机方向反向。
电源接口采用直流电源供电,工作电压范围建议为36-68VDC ,电源功率大于150W ,电压不超过75VDC和不低于20VDC 。
研控科技 YSS-C 系列 总线型步进电机驱动器 用户手册说明书
深圳市研控自动化科技有限公司目录前言 (1)1概述 (2)1.1产品介绍 (2)1.2特性 (2)1.3应用领域 (2)1.4产品命名规则 (3)2性能指标 (4)2.1电气特性 (4)2.2使用环境 (4)3安装 (5)3.1安装尺寸 (5)3.2安装方法 (5)4 驱动器端口与接线 (6)4.1接线示意图 (6)4.2端口定义 (7)4.2.1状态指示灯 (7)4.2.2通讯端口 (7)4.2.3输入/输出端口 (7)4.2.4电源端口 (8)4.2.5拨码开关 (8)4.3输入/输出端口操作 (8)4.4拨码开关设定 (9)5 电机规格及接线 (11)5.1技术规格 (11)5.2电机接线图 (11)6 CANopen协议 (12)6.1 CANopen协议概述 (12)6.1.1 CAN总线与CANopen (12)6.1.2 CANopen功能描述 (12)6.2驱动器控制协议CiA 402 (15)6.2.1 CiA402状态机 (15)6.2.2控制字与状态字 (16)6.2.3工作模式 (17)6.2.4位置模式 (18)6.2.5速度模式 (20)6.2.6回原点模式 (22)7对象字典 (26)8报警排除 (35)9版本修订历史 (36)10保修及售后服务 (37)10.1保修 (37)10.2售后服务 (37)附录1:快速编写运动控制功能块指南 (38)前言感谢您使用本公司总线型步进电机驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:注意:提醒您注意文字中的要点。
步进电机驱动器说明书

TB6600升级版两相步进驱动器使用说明书[使用前请仔细阅读本手册,以免损坏驱动器]目录一、产品简介 (3)概述 (3)特点 (3)二、接口和接线介绍 (3)信号输入端 (3)电机绕组连接 (3)电源电压连接 (4)状态指示 (4)接线方式 (4)接线要求 (5)三、电流、细分拨码开关设定 (5)细分设定 (5)工作(动态)电流设定 (6)四、机械和环境指标 (6)使用环境及参数 (6)机械安装图 (7)五、电机适配 (7)电机适配 (7)电机接线 (8)供电电压和输出电流的选择 (8)五、常见问题 (9)应用中常见问题和处理方法 (9)六、保修条款 (10)◆概述TB6600升级版驱动器是一款专业的两相混合式步进电机驱动器,可适配国内外各种品牌,电流在4.0A及以下,外径39,42,57mm的四线,六线,八线两相混合式步进电机。
适合各种小中型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、大电流运行的设备中效果特性。
◆特点※信号输入:单端,脉冲/方向※细分可选:1/2/4/8/16/32细分※输出电流:0.5A-4.0A※输入电压:9-42VDC※静止时电流自动减半※可驱动4,6,8线两相、四相步进电机※光耦隔离信号输入,抗干扰能力强※具有过热、过流、欠压锁定、输入电压防反接保护等功能※体积小巧,方便安装※外部信号3.3-24V通用,无需串联电阻◆信号输入端PUL+ PUL-脉冲输入信号。
默认脉冲上升沿有效。
为了可靠响应脉冲信号,脉冲宽度应大于1.2us。
DIR+ DIR-方向输入信号,高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5us建立。
电机的初始运行方向与电机绕组接线有关,互换任一相绕组(如A+、A-交换)可以改变电机初始运行方向。
ENA+ ENA-使能输入信号(脱机信号),用于使能或禁止驱动器输出。
使能时,驱动器将切断电机各相的电流使电机处于自由状态,不响应步进脉冲。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电器规格
说明
供电电压(VDC) 峰值输出电流(A) 逻辑输入电流(mA) 步进脉冲相应频率(KHz) 脉冲低电平时间(uS)
最小值
12 0.5
2.5
典型值
跟用户要求有关 跟用户要求有关
15 -
最大值
40 4.0
200 -
工作电流设定示意图
高性能两相混合式步进电机驱动器
功能设定示意图
输入信号波形时序图
驱动器信号示意图
高性能两相混合式步进电机驱动器
驱动器接线示意图
YKA2404S 细分设定表
细分数 D6 D5 D4 D3
――过热保护 ――过流、电压过低保护 ◆ 体积小巧 YKA2404S是一款经济、小巧的步进驱动器,体积为25x136x92mm2。
典型应用
雕刻机 剥线机
激光打标机
激光内雕机
概述
YKA2404S是整/半步型驱动器,驱动电压DC12-40V,采用单电源供电。适配6或8出线电流在4.0A以下, 外径42-86mm的各种型号的二相混合式步进电机。
D2
D1
1(整步)
2(半步)
ON
OFF
无效
无效
无效
ON,双脉冲:PU 为正向步进脉冲信号,DR 为反向步进脉冲信号
OFF,单脉冲:PU 为步进脉冲信号,DR 为方向控制信号
无效
安装尺寸(单位:mm)
高性能两相混合式步进电机驱动器
z 采用侧面安装,散热效果较好
指示灯和电位器功能说明
标记符号
功能
注
释
PWR 电源指示灯
工作。出现过热保护请加装散热器。 5. 过流(电流过大或电压过小)时故障指示灯 O.C 灯亮,请检查电机接线及其它短路故障或是否电压过低,
若是电机接线及其它短路故障,排除后需要重新上电恢复。 6. 驱动器通电时绿色指示灯 PWR 亮。 7. 过零点时,TM 指示灯在脉冲输入时亮。
DC12~40V
!注意:
1. 不要将电源接反,输入电压不要超过 DC40V。 2. 输入控制信号电平为 5V,当高于 5V 时需要接限流电阻。(接法见第 6 页) 3. 此型号驱动器采用特殊的控制电路,故必须使用 6 出线或者 8 出线电机。 4. 驱动器温度超过 70 度时停止工作,故障 O.H 指示灯亮,直到驱动器温度降到 50 度,驱动器自动恢复
+ 输入信号光电隔离正端
接+5V 供电电源+5V-+24V 均可驱动,高于+5V 需接限流电阻, 请参见第 6 页输入信号。
DR
D2=OFF 时为方向控制信号
用于改变电机转向。输入电阻 220Ω ,要 求 :低 电平 0-0.5V,
D2=ON 时为反向步进脉冲信号 高电平 4-5V,脉冲宽度>2.5us。
驱动器通电时,绿色指示灯亮。
TM 零点指示灯
零点信号有效,有脉冲连续输入时,绿色指示灯点亮。
O.H 过热指示灯
过热时,红色指示灯点亮。
O.C 过流/电压过低指示灯
电流过高或者电压过低时,红色指示灯亮。
Im 电机线圈电流设定电位器 调整电机相电流,逆时针减小,顺时针增大。
引脚功能说明
标记符号
功能
注
释
+ 输入信号光电隔离正端
接+5V 供电电源+5V-+24V 均可驱动,高于+5V 需接限流电阻, 请参见第 6 页输入信号。
PU
Hale Waihona Puke D2=OFF 时为步进脉冲信号
下降沿有效,每当脉冲由高变低时电机走一步。输入电阻 220
D2=ON 时为正向步进脉冲信号 Ω ,要 求 :低 电平 0-0.5V,高电平 4-5V,脉冲宽度>2.5us。
+ 输入信号光电隔离正端 MF 电机释放信号 +V 电源正极 -V 电源负极 AC、BC +A、-A 电机接线
+B、-B
高性能两相混合式步进电机驱动器
接+5V 供电电源+5V-+24V 均可驱动,高于+5V 需接限流电阻, 请参见第 6 页输入信号。 有效(低电平)时关断电机线圈电流,驱动器停止工作,电 机处于自由状态。
高性能两相混合式步进电机驱动器
YKA2404S 驱动器
特点
◆ 高性能、低价格 ◆ 采用独特的控制电路,有效的降低了噪音,增加了转动平稳性 ◆ 最高反应频率可达200Kpps ◆ 步进脉冲停止超过100ms时,线圈电流自动减半,减小了许多场合的电机过热 ◆ 双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率 ◆ 光电隔离信号输入/输出 ◆ 驱动电流从0.5A/相到4.0A/相连续可调 ◆ 可以驱动任何4.0A相电流以下两相混合式步进电机 ◆ 单电源输入,电压范围:DC12-40V ◆ 出错保护: