SLC文件的扫描路径生成方法
微波遥感

微波遥感技术和应用机械工程学院机械设计制造及其自动化张霁1005040221一、遥感技术的介绍遥感技术是20世纪60年代兴起的一种探测技术,是根据电磁波的理论,应用各种传感仪器对远距离目标所辐射和反射的电磁波信息,进行收集、处理,并最后成像,从而对地面各种景物进行探测和识别的一种综合技术。
目前利用人造卫星每隔18天就可送回一套全球的图像资料。
利用遥感技术,可以高速度、高质量地测绘地图。
它好比孙悟空的一双火眼金睛,能从云朵上看清万物根本面目,从高空感知地下和海底的宝藏。
二、微波遥感的定义运用波长为1~1 000mm的微波电磁波的遥感技术。
包括通过接收地面目标物辐射的微波能量,或接收遥感器本身发射出的电磁波束的回波信号,根据其特征来判别目标物的性质,特征和状态,包括被动遥感和主动遥感技术。
微波遥感对云层、地表植被、松散沙层和冰雪具有一定的穿透能力,可以全天侯工作。
微波遥感是传感器的工作波长在微波波谱区的遥感技术,是利用微波投射于物体表面,由其反射回的微波波长改变及频移确定其大小、形态以及移动速度的技术。
常用的微波波长范围为0. 8~30厘米。
其中又细分为K、Ku、X、G、C、S、Ls、L等波段。
微波遥感的工作方式分主动式(有源)微波遥感和被动式(无源)微波遥感。
前者由传感器发射微波波束再接收由地面物体反射或散射回来的回波,如侧视雷达;后者接收地面物体自身辐射的微波,如微波辐射计、微波散射计等。
三、遥感技术的发展史遥感是以航空摄影技术为基础,在20世纪60年代初发展起来的一门新兴技术。
开始为航空遥感,自1972年美国发射了第一颗陆地卫星后,这就标志着航天遥感时代的开始。
经过几十年的迅速发展,目前遥感技术已广泛应用于资源环境、水文、气象,地质地理等领域,成为一门实用的,先进的空间探测技术。
1、萌芽时期1608年制造了世界第一架望远镜。
1609年伽利略制作了放大三倍的科学望远镜并首次观测月球。
1794年气球首次升空侦察。
微波遥感实习报告
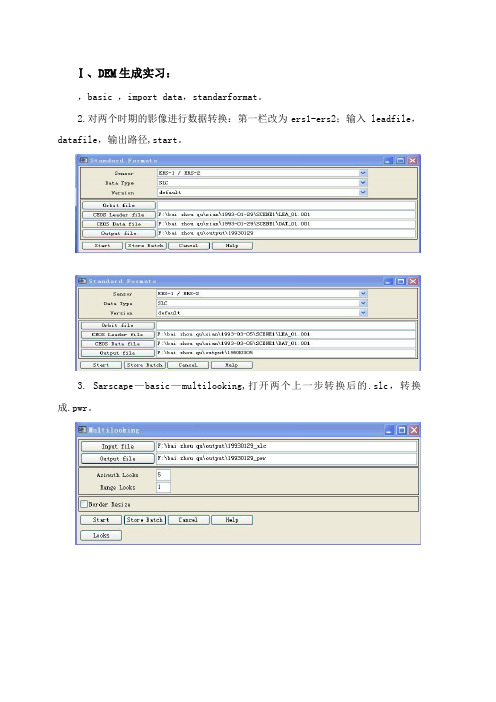
Ⅰ、DEM生成实习:,basic ,import data,standarformat。
2.对两个时期的影像进行数据转换:第一栏改为ers1-ers2;输入 leadfile,datafile,输出路径,start。
3. Sarscape—basic—multilooking,打开两个上一步转换后的.slc,转换成.pwr。
4.在.pwr显示窗口双击裁剪。
5.裁剪:sarscape—tools—sampl eselections—manual selection—iuput .slc西:2600;东:3600;北:12400;南:18400;Start 生成一个slc-rsp文件。
对裁剪后的进行multilooking6导入dem数据。
Basic,importdata,tiff,输入dem,catagraphic,commit,start。
7sarscape, interferometry,baseline estimate,master file:。
rsp;slave file: Start,8.相位解缠sarscape,interfermotry,inferogram to phase unwrapping,输入 input master file:.;Slave file:.slc;dem:dem;阈值从改为生成.upha。
9vector;creat enew vector layer;using raste image file;在弹出窗口open ,ok在窗口改layer名为gcp,将gcpload到cc上,Mode,add new vectors,point在cc窗口双击选点,选相关值大于,10个点左右。
.选完后,右键accept multi point。
sarscape; tools; generate gcpfile;outputfile:gcpreference file:ccdemfile:0129demgcp vector file: .start.10、sarscape ,interferometry,refinement and refletting;在弹出窗口中Master file:-slc-rsp-pwr;Slavefile:.pwrInterfermotry file:选fint后缀。
测试数据自动生成方法
所有输入变量取值的笛卡尔乘积 , 构成程序 的定义域 D,
即:
的优势和高效性 。因此将遗传算法引入到传统的程序直
测 试 数 据 自动 生成 方 法
邢 恺 , 立 军 伦
( 尔滨 师范 大学 计 算机科 学 系, 哈 黑龙 江 哈 尔滨 1 08 ) 5 00
摘 要 : 件测 试是 提 高软 件可 靠性 、 软 保证 软件 质量 的重要 手 段 , 可分 为 静 态分 析 、 路径 选 择 、 试 数 据 生 成 和 动 态 分 析 四 测
法生 成测 试数 据 , 并将 函数 极 小 化 用 于 构造 适 应 度 函数 , 且通 过 实例验 证其 有效性 。
者对程序的语句 、 分支和逻辑路径进行各种覆盖_ 测试, 2 J
可 以在不 同点检 查程 序 的状态 , 以确 定实 际状态 与 预期状
1 测试 数 据生成 理 论
维普资讯
第 l 6卷 第 9期 20 0 6年 9月
计 算 机 技 术 与 发 展
C M PUTER O TE( No【 GY ’ H o AND VEL DE 0PMl ENr
、o . 6 NO 9 ,1 1 . S p 2 0 e. 06
个阶段, 而软件测试过程 中的一个重要任务是生成测试数据。文中首先给出了遗传算法的形式化描述 , 然后提出了遗传算
法 和 函数极 小 化相 结合 的方 法 自动生 成测 试数据 , 通过 具体 实 例表 明其 有效性 。 并
关键 词 : 件 测试 ; 试 数据 ; 传算 法 ; 软 测 遗 函数极 小化
.
fncin mii zt n fra tma i fwaets aag n r t n. x m pes o sef t e es u to nmiai uo t s t r etd t e eai An e a l h wsi fe in s . o o co o t c v
基于图论的物流配送最短路径比较研究
K yWods Di s a Fo y h r s p t,gah Lo iis e r j t , ld ,so et ah rp , gsc kr t t
Clss Nu b TP3 16 a m er 0 .
1 引言
最 短 路 径 问 题 是 物 流 配 送 中的 最 基 本 问 题 之 一 】是 , 配 送 中 心 选 址 、 送 路 径 优 化 和 配 送 车 辆 定 位 导 航 的 基 配 础 。 对 于 配 送 路 线 选 择 问 题 , 论 是 最 简 单 的 两 点 之 间 的 无 配 送 路 线 选 择 , 是 单 车 多配 送 目的地 的线 路规 划 与设 计 , 还 或 者 更 为 复 杂 的 多 车 辆 多 目标 和 带 时 间 窗 的车 辆 优 化 调 度 问题 , 根 结 底 都 要 先 解 决 起 点 与 终 点 、 点 与 途 经 的 中 间 归 起 节 点 以 及 各 中 间 节 点 之 间 的 最 短 路 径 问题 。 最 短 路 径 , 它 不 仅 包 括 距 离 最 短 还 可 以 引伸 到 其 他 变 量 如 时 间 、 用 、 费 线 路 容 量 等 。无 论 是 计 算 最 短 路 径 还 是 最 佳 路 径 , 算 法 其
SARscape雷达图像处理技术及其前沿应用
与光学遥感数据的结合
•
是 ENVI的扩展模块,可充分使用ENVI中的功能。
SAR应用案例
提取DEM数据
•
通过InSAR技术手段,短时间内获取瑞士境DEM数据,像 元大小为25米,高程精度为7-15米。
监测地表形变
11天
22天
33天
44天
55天
66天
3.11日本地震
利用InSAR技术对日本仙台市进行地震形变监测。监 测结果表明,北部地面比地震前高,最大形变值达到 30厘米,南部地面总体呈沉降状态,最大值在监测区 域最南部,达到3.4米。总体上可以看出,从北向南, 呈现地面隆起到沉降的趋势,并且最南部区域地面严 重沉降。
2003年12月26号伊朗巴姆地震前后地表变形监测城区大部分区域受到影响不连贯变形南北产生方向相反的变形形成南北向走滑断层京津高铁沿线地面沉降速率2007120096中国国土资源航空物探遥感中心遥感方法所葛大庆沪杭高铁沿线地面沉降监测中国国土资源航空物探遥感中心遥感方法所葛大庆北京地铁13号线地表沉降监测中国国土资源航空物探遥感中心遥感方法所葛大庆冰川极地地区海冰监测不连续的浮冰快速运动的冰舌森林制图木材蓄积量森林制图多时相的水稻种植监测高分辨率sar监测作物生长洪水监测洪水发生时一个月后绿色植被褐灰色裸地蓝色水体土地利用变化监测1986tm影像2007tmalospalsar融合影像19862007土地利用变化图城市制图滑坡地面形变监测dem获取建筑物变形监测森林制图雪冰川制图陆地海洋目标检测洪水湿地监测土地覆盖制图荒漠化监测农业监测作物估产envisarscape应用领域溢油监测海波高度估算sarscape
聚焦扩展模块——Focusing Module
滤波扩展模块——Filter Module 扫描式干涉雷达处理扩展模块——ScanSAR Interferometry Module 极化雷达处理扩展模块——Polarimetery & PollnSAR Module 干涉叠加扩展模块——Interferometry Stacking Module
SARscape-常见问题

SARscape Q &A常见问题Q. –要运行SARscape软件,电脑上必须装ENVI并且有ENVI的许可吗?A. –是的.Q. - SARscape支持的操作系统有哪些?A. - WINDOWS (XP, SP2, Vista, 7) 32 和64位, LINUX 64 位.Q. – SARscape软件采用的是硬件狗加密的形式,如何确定许可里面有SARscape的哪些模块?A. –可以双击SARscape安装包中的"get_client_id.exe"文件, 会显示相关的加密狗的信息(如:许可期限、可用模块等).Q. –要运行SARscape软件,ENVI至少是哪个版本?A. –ENVI从4.3版本开始,支持所有SARscape的功能Q. – SARscape软件LINUX版本的,要比WINDOWS版本的好用吗?A. –是的,在绝大部分的处理上,在相同的硬件环境下,LINUX平台要比WINDOWS平台运行效率高. 而且,比如说大数据量的处理(好多个G),在WINDOWS平台下可能会报错,在LINIX平台下可以顺利的运行。
Q. –要运行SARscape,是否必须有IDL环境?A. –不需要.Q. –在SARscape中生成的数据,可以用ENVI的功能进行处理,然后再在SARscape中处理和使用吗?A. –可以,用专门的数据导入功能,该功能可以将开始生成的SARscape结果的信息保存,不过要注意的是,在ENVI中处理之后的数据,栅格数据的参数(如行列号)要保持不变。
Q. – SARscape中可以自定义SAR传感器吗,读取自定义传感器SAR数据和在SARscape和ENVI 中处理?A. –可以。
用户可以根据在“custom”自定义传感器中提供的通用的数据格式来读取用户自己的SAR数据。
在做聚焦处理的时候,SLC文件需要准备成SARscape标准的数据格式:浮点型的复数矩阵数据文件,以及两个头文件:.sml文件和.hdr文件。
InSAR干涉测量—SBAS指导手册
SBAS指导手册样例数据说明:这个手册详细阐述了SARscape sbas处理过程,为用户处理数据提供指导,该手册中的大多数插图来源于两组样例数据,基于这个样例数据的完整的SBAS处理流程和结果,所用的软件版本是ENVI5.0 SP3和SARscape5.0.00。
样例数据日日本千叶市,靠近东京,两组数据集,ENVISAT-ASAR和ALOS-PALSAR,覆盖空间和获取的时相很相近,为了更好的对比结果,此外,还有每日测量的GPS数据,用来验证SBAS的结果。
ASAR数据集包含有34景的降轨数据,IS2模式VV极化,时间是20060904到20100809。
下图中的红框区域。
PALSAR数据集包含有23景降轨数据,FBS和FBD模式,HH极化,时间是20060826到20101022。
下图中的篮框区域。
数据列表如下:数据包含.hdr头文件、.sml头文件和.kml文件,在这个例子中,很多地表的沉降和抬升都是预期的,这个区域是油气开采和水回填导致的地表形变。
SBAS处理流程开始之前的准备:设置系统参数,打开ENVI菜单的File->Preference,设置默认的输入输出路径,如下图所示:ENVI系统设置默认的输入输出路径在SARscape参数面板中,设置默认输出TIF格式的结果,TIF格式的8bit结果,对复数数据(振幅+相位)能做彩色渲染,如干涉图,这样以便于中间结果的查看,本文中很多插图都是TIF结果。
Cartographic Grid Size制图分辨率,在此设置一个合适的制图分辨率,可以自动计算多视的视数,这个参数在SBAS过程中没有影响,就是不同的制图分辨率设置在感兴趣区域选择的时候显示强度数据时会有不同。
默认参数面板中设置制图分辨率和生成TIF设置ASAR和PALSAR的工作路径自适应滤波主要参数调整,可提高干涉工作流中的干涉图生成配准主要参数调整,可提高干涉工作流中的配准去平主要参数调整,可提高轨道精炼和重去平以及第二步反演这个参数的勾选用于干涉工作流处理时大的轨道残余相位的去除还要准备相应区域的参考DEM数据,如果没有更高精度的DEM,可以选择SRTM的免费DEM数据,可用SARscape自动下载。
Doris应用大全
Doris应用大全FFTW的安装FFTW是由MIT的Matteo Frigo和Steven G. Johnson. 开发的,可用来进展快速傅立叶变换。
目前最新版本:v 相关翻开终端,进入FFTW路径,依次执行:./configure --prefi*=`pwd` --enable-floatmakemake install完成安装。
1.1Doris的安装目前,Doris的最新版本为v3.17,下载地址:解压后进入src路径〔cd /…/doris/src〕,依次执行:./configuremakemake install完成安装。
1.2SARtools和ENVISAT_TOOLS的安装分别进入各自路径,执行:makemake install完成安装1.3getorb的安装假设linu*的版本为fedora4,则需首先安装g77利用getorb可以获得ERS/ENVISAT的准确轨道,Doris的M_PORBITS 和S_PORBITS要调用getorb 目前最新版本v 相关进入getorb路径,依次执行:makemake install完成安装1.4snaphu的安装Stanford开发的解缠工具,被在Doris中的UNWRAP调用,目前最新版本v 相关进入snaphu的src路径,依次执行:makemake install完成安装。
1.5GMT的安装2.软件运行2.1设置环境变量在fedora默认的bash下,设置如下环境变量:e*port PAGER=lesse*port EDITOR=vie*port EDITOR=gedit /为日前方便,可直接在../etc/bashrc中参加上述两行以永久性设置环境变量。
2.2runDoris为方便用户,可用run命令生成初始化文件。
2.2.1 在终端输入run –g在当前路径下生成如下几个文件:Input.m_inital;input.s_intial;input.resample;input.coregistration;input.products;;正常时在终端返回以下信息:*--------------[andylocalhost ~]$ run -grun: ***INFO*** generation of inputfiles finished.run: ***INFO*** inputdir: Inputfilesrun: ***INFO*** outputdir (stout): Outinforun: ***INFO*** outputdir (matrices): Outdatarun: ***INFO*** Using e*ecutable in path: dorisrun: ***TIP*** run -e1; run -s1-------------------------*输入run –e1调用gedit编辑Input.m_inital(主影像初始化文件)Input.m_inital主要实现以下四步:读取SLC文件―------―m_readfiles数据剪裁及格式转化―――m_crop过采样〔可选〕―――――m_ovs确定准确轨道――――――m_porbits在Input.m_inital中要给出SLC文件volume,leader、data file的路径以及Delft轨道数据文件的路径。
Doris处理过程及参数说明
1,命令介绍.生成模板:run –g编辑模板:编辑第一步模板:run –e1编辑第二步模板:run –e2编辑第三步模板:run –e3编辑第四步模板:run –e4编辑第五步模板:run –e5编辑第六步模板:run –e6编辑第七步模板:run –e7编辑第八步模板:run –e9(每行前加 C 表示屏蔽该行。
打开模板文件后,按“i“表示可以对进行插入操作,如果删去时,直接用delete或后退键。
按ESC键时则退出当前的编辑状态。
若要退出文件时,则先按ESC,然后:q!,或:wq,其中:q!表示退出不保存修改,:wq为保存修改。
)运行处理:运行第一步:run –s1运行第二步:run –s2运行第三步:run –s3运行第四步:run –s4运行第五步:run –s5运行第六步:run –s6运行第七步:run –s7运行第八步:run –s92,参数解说及设置。
2.1,第一步:读取主影像信息。
(1)需要处理步骤。
必需:m_readfiles(读取主影像头文件信息).必需:m_crop(读取主影像数据体信息).不需:m_ovs(主影像过采样步骤):作干涉处理时,一般不运行。
可选:m_prorbits(读取主影像精轨文件):若要使用提供的精密轨道数据时,就执行该行,否则直接C掉。
(2)小步骤参数说明及设置。
############################################################INSAR通用参数设置,每步都有的。
###########################################################名称:LOGFILE用处:用以记载DORIS处理过程中所有信息。
文件名:doris.log.名称:M_RESFILE用处:用以记载主影像文件所有信息。
文件名:master.res名称:S_RESFILE用处:用以记载辅影像文件所有信息。
IPTA
Beijing Oriental Titan Technology Co.,LTD.
IPTA SLC文件表
cd slc /bin/rm -r 20000810 20010726 20020919 20021128 /bin/rm -r 20030313 20031218 2004* cd .. Ls slc/*/*.rslc > SLC_tab_t Ls slc/*/*.rslc.par > SLC_tab_ta paste -d ' ' SLC_tab_t SLC_tab_ta > SLC_tab 人工编辑,生成包含.rslc和.rslc.par的文件表,如图
ras_pt pt - ave.rmli.ras pt.ras 1 5 255 0 0 3
disras pt.ras
单个SLC光谱属性选点
Beijing Oriental Titan Technology Co.,LTD.
后向散射强度选点
两种方法综合的候选点
生成SLC数据堆和相应的SLC数据堆参数文件
cp -r ../IPTA_demo_Luxemburg_input/slc .
2.计算均值强图影像
ls slc/*/*.rmli > rmli_list
ave_image rmli_list 400 ave.rmli 1 - 1 1 1
ras_dB ave.rmli 400 1 0 1 1 -22. 3.5 0. 1 ave.rmli.ras
选择干涉候选点:
1)依据单个SLC的光谱属性 2)依据稳定的后向散射强度 3)融合两种方法的候选点
Beijing Oriental Titan Technology Co.,LTD.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键 词 : 速成 形 ; L 快 S C文 件 ; 描 路 径 ; 成 扫 生
方 法 中 图 分 类 号 : P 9 T 31
文献标 识码 : A
文 章 编 号 :0 1 2 7 2 1 ) 1 0 1 —0 i0 —2 5 (0 0 1 — 0 8 3
Ab ta t: sr c Thep pe n r du e hes r c ur f a ri t o c st t u t e o SLC ie f ma ih i s d i a i o o y ng fl or twh c s u e n r p d pr t t pi
f u e ton .Th a a— r a i e ho i s ud o r sci s ed t e dng m t d s t —
i d, n a h —ge r tng a g rt e a dp t ne a i l o ihm p le heo a p ist dd
的格式 , 析 了 S C文 件 的数 据 存储 结 构和 特 点 。 分 L 研 究 了 S C数 据 的读 取方 式 , 用奇偶规 则判 断 的 C 加 AD模 型文 件 通 过 分
层转换 为 2 5维的模 型文 件 格式 , 后生 成 每一 层 . 然 的扫描 路径控 制成形设 备进 行加工 。扫描路 径生成 算 法是 快速成形 数据 处 理 的关 键 技术 之 一 , 常用 的 算 法有顺 序往返 直线 扫描法 [ 、 1 环形扫描 法[ 、 2 分形 ] 扫描法 L 和 分 区扫 描 法 【 。S C文 件 格 式 是 由 3 5 ] L
Maeil e 司创建 的用来生 成三维立 体模 型切 片 tr i 公 as
数 据 的一种树状 文件 格 式 , 它是 一 种 2 5维 的轮 廓 . 表达 C D模 型 , 内轮 廓 和 外 轮廓 所 包 围 的实 体 A 由 模 型沿 Z轴逐 次 递 增 构 成整 个 零 件 实 体 。S C数 L 据 可 以 由多种 资源 生成 , 括 C 包 AD实体 模 型 、 面 表 模 型或依 次写 入 的层 数 据 ( C 扫描 机 获 得 的扫 如 T 描数据 ) 。 等
t c no o y, n n l z s t e s o i o m a f t e e h l g a d a a y e h t rng f r t o h
1 S C 文 件 格 式 L
S C文 件 的 结 构 由头文 件 、 留部 分 、 本 表 L 预 样
-e e u e O de e m i e wh t e i ti t n 。 v n r l s t t r n e h ra po n swihi t c nt u d s i he o o r, itngu s ng t s i lne nd ihi he ol d i a d s e i e n a iin s me s e i ls t to u h a h d ln .I dd to o p ca iua i n s c
点 是否在轮 廓 区域 内, 区分 了扫描 线 的虚 实特性 , 并
对 轮 廓 垂 直 或 重 合 于 扫 描 线 、 值 点 和 凹 拐 点 这 几 极
种 特殊情 况进行 了讨论 。最后 生成 了风 力机 叶片 以
及 齿轮 模 型 的 扫 描 路 径 , 实 了算 法 的有 效 性 。 证
型 的线 宽补偿 参数 等 信息 , 于 相关 人员 的相互 交 用
流和保 证制造 零件 的 精度 ; 留部分 是 为将 来 使用 预
预 留 的 空 间 , 占用 2 6个 字 节 空 间 ; 本 表 部 分 描 共 5 样
lne e t e e o n s a o a nfe to oi t i s, x r m p i t nd c nc ve i lc i n p n s a e d s u s d Atl s , o t r u fls t e s a ni r ic s e . a t s f wa e f lil h c n ng pa h a c r i O t e S t c o d ng t h LC ie v ld tng t e c r fls, a i a i h o — r c ne sa ei b lt ft l rt m. e t s nd r la iiy o he ago ih
S C文 件 的 扫描路 径 生 成方 法 L
吴 懋 亮 , 麟 望 华 ( 海 电力 学院 , 海 209 ) 上 上 0 0 0
Ge r to e h d o heSc nn n t s d o ne a i n M t o ft a i g Pa h Ba e n SLC l s Fi e
wU Ma o—l n 。 i g HUA n— u a Li j n
(h n h i S a g a Un v r iy o e ti we , h n h i 0 0 0, i a ie st fElc rcPo r S a g a 0 9 Ch n ) 2
摘要 : 介绍 了快速成 形加 工 中常 用 的 S C文件 L
a o ou dg s p r le O or v ria O s a sc nt r e e a a llt e tc lt c nni ng
部分 和轮廓数 据部 分组 成 。其 中 , L S C的头 文 件包
含文 件名 、 制作 人员 、 司组 织 、 L 公 S C版本 和 三 维模