永磁直线同步电机无位置传感器动子位置辨识
永磁直线同步电机驱动系统速度和位置无传感器检测新方法

为 了解决 机械 传感器 给调 速 系统带来 的各种 缺
陷, 许多 学者 开展 了永 磁 同 步 电机 无 机 械 传感 器 控
制研 究 。无传 感器 控制是 指利用 电机绕组 中的有关
u=i L 一 i0 ) ( R+ i 手 n 一 p 1 ) u=i ‘ 毗s 0 ) R+ 一 i + 手 n
大 了 驱 动 系统 的 空 间 尺 寸 。
2 P ML M 数 学 模 型 S
P S 的三 相绕组 星 型连接 , 假设 绕组 反 电 ML M 若
势 是 正 弦 的 且 忽 略 磁 饱 和 。可 以 得 到 : H = R +厶 一 口 f n i P s 0 i
1 引 言
永 磁直 线 同步 电机 ( ML M) 于 采 用 直 接 驱 P S 由 动, 克服 了传 统 的“ 转 电 机 一联 杆/ 杆 ” 驱 动 旋 丝 型
系 统 的 反 向 间 隙 、 摩 擦 、 惯 性 等 缺 点 , 有 速 度 大 大 具
要有 两 种 : ) 过 检测 基 波 反 电势 来获 得 转子 的速 1通
论 采取 哪Leabharlann 控 制方 案 , 需 要 测 量 动子 的速 度 和位 都
能 。然 而这种 方法 通常 实现起 来 比较复杂 。
本文 针对 永磁 直 线 同 步 电机 驱 动 系统 , 计 了 设
一
置 。 目前 , 类驱 动 系统 一 般 采 用光 栅 尺 来 获 取位 这
置和速 度信 号 。但 位置传 感 器 的存 在带 来 以下几 个
P S 三相 电压模 型 的基础 上 , 过 pr ML M 通 a k变换 , 到 基 于 估 计 位 置 的 由 轴 模 型 , 而 求 出 由 轴 电 得 从
永磁同步电动机转子位置辨识

永磁同步电动机转子位置辨识摘要永磁同步电动机(Permanent magnet synchronous Machine, PMSM)由于无需励磁电流、体积轻便、运行效率很高,在工业领域得到越来越广泛的应用。
只有知道了精确的转子位置信息,才能实现永磁同步电动机转子磁场定向的运动控制。
在传统的永磁同步电动机运动控制系统中,通常采用光电编码器或旋转变压器来检测转子的位置。
然而,这些传感器增加了系统的成本,并且降低了系统的可靠性。
因此,无传感器检测永磁同步电动机转子位置已逐渐成为热点。
本文阐述了永磁同步电动机的发展历程、永磁材料的发展,以及它的结构、工作原理和特点等。
介绍了永磁同步电动机转子位置检测的常用方法分两种:即直接方式检测和间接方式检测。
直接方式可分为:旋转变压器法、磁编码器法、光电编码器法;间接方式可分为:电感法、磁链法、假想坐标系法、基于各种观测器的估算方法、卡尔曼滤波器法、高频注入法和人工智能理论基础上的估算方法。
针对本课题主要做了以下研究工作:在构建其数学模型的基础上,深入分析电机定子电感的饱和效应,得出旋转高频电压注入法能够准确跟踪转子凸极位置,但其存在不能确定估算结果是N极还是S极位置的问题。
对于这个问题,本文又分析了永磁同步电机定子电流对电机磁路饱和度的影响,根据旋转电流矢量幅值变化特性,提出了一种判定转子永磁体N/S极极性的方法,解决了常规高频注入法所存在的估算结果可能反向的问题。
关键词:永磁同步电动机;高频电压注入;转子位置检测ABSTRACTAs the permanent magnet synchronous motor without excitation current, volume light, high efficiency, more and more widely in the industrial fieldsof application. Only know the exact rotor position information, to achieve permanent magnet synchronous motor rotor flux orientation motion control. In a traditional permanent magnet synchronous motor motion control system, usually optical encoder or resolver to detect the rotor position. However, these sensors increase the system cost and reduced reliability of the system.Therefore, sensorless permanent magnet synchronous motor rotor position detection has gradually become a hot spot.This paper describes the development process of permanent magnet synchronous motor, permanent magnet materials development, and its structure, working principle and characteristics. Introduced a permanent magnet synchronous motor rotor position detection of the common methods in two ways: the direct detection and indirect detection methods. Direct methods can be divided into: rotating transformer, magnetic encoder method, optical encoder method; indirectly, can be divided into: inductance method, flux method, imaginary coordinate system method, the various observer-based estimation method, Kalman filtering device method, high frequency injection method and Artificial Intelligence based on the theory of estimation methods.The main topics for research work to do the following: In building a mathematical model based on in-depth analysis of the saturation effect of the stator inductance, obtained rotating high frequency signal injection method to accurately track the position of the rotor salient, but its existence can not be determined or estimated results is N pole S pole position of the problem. For this problem, this paper analyzed the current permanent magnet synchronous motor stator magnetic circuit saturation, according to the amplitudevariations of current vector rotation, a permanent magnet rotor determine N / S pole polar solutions to Injection of conventional high-frequency estimation results are likely to reverse the existing problems.Keywords:Permanent magnet synchronous motor, High frequency signal injection, Rotor position detection目录第一章绪论 (1)1.1课题的研究背景 .......................................................1 1.2 永磁同步电动机的国内外研究现状 (2)1.3永磁材料的发展 ....................................................... 4 第二章永磁同步电动机的结构及特点. (4)2.1永磁同步电动机的总体结构 (4)2.1.1 定子结构 (5)2.1.2 转子结构 ....................................................... 6 2.1.3 永磁同步电动机的转子磁极结构型式 ............................... 6 2.2永磁同步电机的特点 .................................................. 10 第三章永磁同步电动机的工作原理及数学模型. (11)3.1永磁同步电动机的工作原理 ............................................ 11 3.2 坐标变换原理 . (12)3.3永磁同步电动机的数学模型 (13)3.4磁路结构对数学模型中参数的影响 ...................................... 15 第四章永磁同步电动机转子位置检测的方法 (17)4.1直接方式 ............................................................ 17 4.2间接方式 (18)第五章旋转高频注入法的原理及应用 (22)5.1旋转高频信号激励下永磁同步电机数学模型 .............................. 22 5.2旋转高频电压信号注入法原理 (23)5.3永磁同步电机转子初始位置检测 (27)5.3.1基于旋转高频注入法的转子初始位置检测原理 (28)5.3.2面贴式永磁同步电机定子电感饱和效应分析研究 .................... 29 5.3.3根据高频电流响应幅值判定N、S极 . (31)第六章结论 ................................................................ 32 参考文献 ................................................................... 34 翻译部分 . (36)英文原文 ............................................................... 36 中文译文 (45)致谢 (54)中国矿业大学2021届本科生毕业设计第1页第一章绪论1.1课题的研究背景直流电气传动和交流电气传动在19世纪中期先后诞生,由于直流电气传动具有良好的调速性能和转矩控制性能,改变决定交流调速的电源频率的改变和对电动机转矩控制极为困难,因此,在20世纪相当长的一段时间内直流传动成为电气传动的主流。
无位置传感器的永磁无刷电机转子位置检测算法
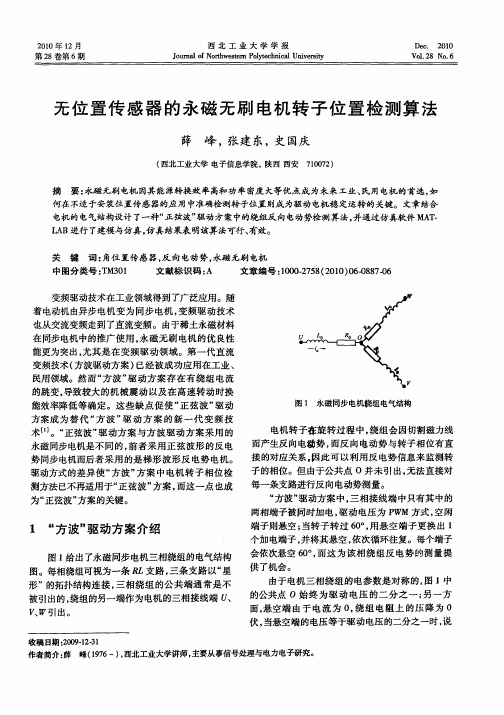
的跳变 , 导致较大的机械震 动以及在 高速转动时换 能效率降低等确定。这些缺点促 使“ 弦波” 正 驱动 方案成为 替代 “ 方波 ” 动 方案 的新 一 代变 频技 驱 术【 。“ 1 正弦波” ] 驱动方案 与方波驱动方案采用 的
永磁 同步 电机是不 同 的 , 者 采 用 正 弦波 形 的反 电 前 势 同步 电机 而后 者采 用 的是 梯 形 波形 反 电势 电机 。
S 不是 接地 , 是连接 电源 , 图 2 就 见 。调 整 2个状 态
薛 峰, 张建 东,史 国庆
7 07 ) 10 2
( 西北 工业大学 电子信息学院 , 陕西 西安
摘
要: 永磁无刷 电机 因其 能源转换 效率高和 功率 密度 大等 优 点成 为 未来 工业 、 民用电机 的首选 , 如
何在不适 于安装位置 传感 器的应 用 中准确检 测转子位置 则成为驱动 电机稳 定运 转 的关键 。文章结合 电机的 电气结构设计 了一种“ 弦波” 正 驱动方案 中的绕组反 向电动 势检测 算 法, 通过仿真软件 MA - 并 T LB A 进行 了建模与仿真, 仿真结果表明该算法可行、 有效。 关 键 词: 角位 置传 感 器 , 向电动 势 , 反 永磁 无刷 电机 文 献标 识码 : A 文章 编 号 :0 02 5 (00 0 -870 10 - 8 2 1 )60 8 -6 7
( p a ) WM 波示意图
图2 逆变器示意 图
图4 波形及 电路示意 图
图3中 是作为参考三角波, 是正弦控制信 号 , 为 与 比较所得的 S WM波信号 , 是 P
所承载的等效正弦波。 三相 P WM信号分别控制 3 个桥臂上的2 个开关 , 而每个桥臂上的2 个开关状态 互 为反 向 , 就是 说 连 接 电机 三 相 接线 端 的 I、2 也 s s、 ,
永磁电机的转子位置检测与定位
θ0ΠP + 2π ×mΠpe 若用电角度表示 ,θ=θ0 + 2π ×P ×mΠpe ,该 θ角就是我们矢量控制时进行坐标变换所需要的
转子位置角 。其方程为
id =
iq
2 3
cosθ cos (θ - 23π) cos (θ + 23π) sinθ sin (θ - 23π) sin (θ + 23π)
那么怎样才能知道电机转子的初始位置呢 ? 因为电机没有旋转起来时 ,电机端口没有任何可 以反映转子位置状态的电信号 ,自然没有办法获 得电机转子的位置信息 ,那么 ,我们只有还从光电 编码盘来想办法获得这个信息 。现在的通用型光 电编码盘除输出两相相位相差 90°的正交脉冲信 号 A 、B 外 ,还有一路零信号 Z ,和三路彼此相差 120°的脉冲信号 U 、V 、W ,两路正交信号可以用做 电机的转速和转向的判别 ,这可以参考有关文献 。 Z 信号用于电机速度测量过程中的误差修正 ,以 避免累积误差 。那么 U 、V 、W 脉冲信号在电机旋 转时 ,每转变化 P ×360°( P 为极对数) ,即电机转 子的 360°空间被分成了 P 等分 ,每一等分相应于 电信号的一个周期 。U 、V 、W 所组成的状态信号 在一个周期内分别为 :101 、100 、110 、010 、011 、001 , 它们各对应电信号一个周期内的 60°区间 ,对应机 械角为 60°ΠP ,则在电机初始上电时 ,由 U 、V 、W 的状态就可以判定电机转子所处空间位置的相应 区间 ,参见图 1 。
电机在 id = 0 情况下的数学模型就是下面的一组
方程式
uq = Rs iq + L qp iq + e0 ud = - ωrL qiq Te = PΨd id
具有参数辨识的船舶永磁同步推进电机无位置传感器控制

具有参数辨识的船舶永磁同步推进电机无位置传感器控制传统的PMSM控制系统通常需要使用位置传感器来获取转子位置信息,同时进行闭环控制以保证电机的稳定性和精度。
而在船舶工艺中,位置传感器的安装和维护将会增加成本和复杂性,而且在恶劣的海洋环境下会受到严重的影响。
研究如何实现PMSM无位置传感器控制的技术,对船舶工业具有重要的意义。
本文将介绍一种新型的PMSM无位置传感器控制技术,即基于参数辨识的控制方法。
通过这种方法,可以实现对PMSM的高效无位置传感器控制,提高船舶动力系统的性能和可靠性。
一、PMSM无位置传感器控制的技术挑战PMSM是一种非常成熟的电机技术,其在空间无位置传感器控制技术方面一直备受关注。
在传统的PMSM控制系统中,通常需要使用位置传感器来获取转子位置信息,并实现闭环控制。
而无位置传感器控制技术的主要挑战在于如何准确获取电机转子位置信息,以实现高效的闭环控制。
当前已有许多关于PMSM无位置传感器控制技术的研究,主要集中在基于模型预测控制(MPC)、高频注入法和电流注入法等方法上。
这些方法通常需要对电机进行复杂的数学建模和仿真,同时也需要较高的计算资源和算法支持。
而且直接应用到船舶工业中时,需要考虑更为特殊的海洋环境和工况要求。
为了克服PMSM无位置传感器控制技术的挑战,研究人员提出了一种基于参数辨识的控制方法。
该方法通过利用电机的动态特性,实时估计电机的参数和转子位置信息,并进行无位置传感器控制。
这种方法不需要复杂的数学建模和仿真,同时可以适用于船舶等特殊工艺和环境。
基于参数辨识的PMSM无位置传感器控制技术主要包括以下几个步骤:1. 电机模型的参数辨识:通过对动态方程进行分析,利用辨识算法实时估计电机的参数,如电感、电阻等。
2. 转子位置的估计:根据电机的动态响应和参数估计结果,结合滑模控制等方法,实时估计电机的转子位置信息。
3. 闭环控制:利用估计的转子位置信息,结合电流控制等方法,进行闭环控制,保证电机的稳定性和精度。
具有参数辨识的船舶永磁同步推进电机无位置传感器控制

具有参数辨识的船舶永磁同步推进电机无位置传感器控制船舶的永磁同步推进电机是船舶的重要推进设备,它的性能和控制方式直接关系到船舶的航行性能和能源利用效率。
传统的永磁同步推进电机控制通常需要位置传感器来获取电机转子的转动位置,但是位置传感器会增加系统成本,并且在恶劣的海洋环境下容易受到影响。
具有参数辨识的船舶永磁同步推进电机无位置传感器控制技术成为了研究的热点之一。
自上世纪90年代初以来,控制工程领域的研究者们开始关注无位置传感器控制技术,通过参数辨识和模型预测控制等方法,实现了对永磁同步推进电机的无位置传感器控制。
这种技术不仅可以降低系统成本,还可以提高系统的可靠性和抗干扰能力,因此备受船舶领域的关注。
无位置传感器控制技术的核心是通过参数辨识方法获取电机的转子位置信息,然后利用模型预测控制等技术实现对电机的闭环控制。
参数辨识是指通过对电机的数学模型进行参数估计,从而实现对电机状态的准确预测。
模型预测控制是一种基于系统动态模型的高级控制方法,它可以克服传统PID控制器的限制,实现对电机系统的精确控制。
在无位置传感器控制技术中,参数辨识和模型预测控制相结合,可以实现对永磁同步推进电机的高性能控制。
目前,无位置传感器控制技术已经在一些船舶永磁同步推进电机系统中得到应用,并取得了良好的效果。
一些研究团队通过实验验证了无位置传感器控制技术在船舶永磁同步推进电机上的有效性,证明了这种技术可以实现对电机系统的高性能控制。
一些船舶装备制造商也开始将无位置传感器控制技术引入他们的产品中,以提高产品的竞争力和可靠性。
具有参数辨识的船舶永磁同步推进电机无位置传感器控制技术是船舶领域的一个重要研究方向,它可以降低系统成本,提高系统可靠性和抗干扰能力,对提升船舶的航行性能和能源利用效率具有重要意义。
随着控制技术和船舶装备制造技术的不断进步,相信无位置传感器控制技术将会得到更广泛的应用,并为船舶推进系统的发展注入新的活力。
具有参数辨识的船舶永磁同步推进电机无位置传感器控制
具有参数辨识的船舶永磁同步推进电机无位置传感器控制船舶永磁同步推进电机无位置传感器控制技术是船舶电气推进领域的重要技术之一。
随着船舶电气化水平的不断提高,船舶永磁同步推进电机无位置传感器控制技术在船舶动力系统中的应用越来越广泛。
本文将详细介绍船舶永磁同步推进电机无位置传感器控制技术的原理和优势,并对其在船舶电气推进系统中的应用进行深入分析。
1.永磁同步电机(PMSM)原理永磁同步电机是一种以永磁体为励磁源的同步电机,其转子磁极与定子磁场同步旋转,不需要外加励磁电流。
由于永磁同步电机具有结构简单、功率密度大、效率高等优点,因此在船舶电气推进系统中得到了广泛应用。
2.传统位置传感器控制原理传统的永磁同步电机控制通常需要使用位置传感器来获取转子位置信息。
常见的位置传感器包括光电编码器、霍尔传感器、磁编码器等。
这些位置传感器能够准确地获取转子位置信息,并通过控制器实时调节电机的转子位置,从而实现精确控制。
无位置传感器控制是指在不使用位置传感器的情况下,通过电流、电压等信号的检测,推导出电机转子的位置信息,从而实现对电机的控制。
目前主要的无位置传感器控制技术有基于电流模型及观测器、基于电压模型及观测器、基于自适应滑模观测器等。
二、船舶永磁同步推进电机无位置传感器控制技术优势1. 提高可靠性传统的位置传感器容易受到环境因素的影响,如温度、振动、湿度等,从而影响其准确性和稳定性。
而无位置传感器控制技术能够减少了传感器件数和电路复杂度,从而提高了系统的可靠性和稳定性。
2. 降低成本传统的位置传感器需要额外的装配和维护成本,同时也会增加系统的成本。
采用无位置传感器控制技术可以省去这些成本,降低了系统的总体成本。
3. 减小体积位置传感器的安装需要一定的空间,而在船舶上的空间通常都是非常宝贵的。
采用无位置传感器控制技术可以减少了系统的体积,更好地满足了船舶电气推进系统的空间需求。
船舶永磁同步推进电机无位置传感器控制技术在船舶电气推进系统中有着重要的应用价值,具体表现在以下几个方面:1. 提高船舶动力系统的稳定性和可靠性采用无位置传感器控制技术可以减少了传感器的干扰,降低了系统的故障率,提高了船舶动力系统的稳定性和可靠性。
永磁直线同步电机无位置传感器动子位置辨识
Abs r c I o d r o si t mo e p sto a d p e o p r n n ln a s n h o o s t a t: n r e t e tmae v r o i n n s e d f e ma e t ie r y c r n u moo i tr
5Hz,a n u n e o tr p rmee s lk e it n e a d i d c a c r n lz d f ly By me s nd if e c fmo o a a t r i e r ssa c n n u tn e we e a a y e nal . l i a— u e n ,r o a q a e e r ro v rp sto si to e u e o0 0 4 a t3Hz ti h we r me t o tme n s u r ro fmo e o i n e t i main r d c d t . 2 0 r d a .I ss o d
lo l t m t e oc E )itga o s a frdt n l l r a dd a —m o p nai l — opee r o v re( MF nert ni t do a io a ft , n edt ecm e st nag co i f i ne t i e i i o o
永磁同步电机的转子磁极位置辨识方法综述
其中
ˆ f Ld id ˆf d Lls Ldm id
(1.6) (1.7)
q Lls Lqm iq Lq iq
在静止状态下(堵转或者抱死) ,等效方程可简化为
d id dt d uq Rs iq Lq iq dt ud Rs id Ld
ˆ f 为永磁体产生的磁链, Ld 为直轴电感, 轴电压, Rs 为电枢绕组相电阻,e 为转子角速度, Lq 为交轴电感, id 为 d 轴电流, iq 为 q 轴电流。
ud Rs id e q
d d dt d uq Rs iq e d q dt
(1.4) (1.5)
即
(2.18)
L Ld Lq Ld Rs q cos 2 s ˆ id s 2 2 2 2 us s Rs Rs Lq Ld s Lq Ld s Lq Ld sin 2 s 2 2 us s Rs Rs Lq Ld s Lq Ld s 2 ˆq s i
就不会变化。只有当编码器重新安装时,初装角才会发生变化。式(1.1)可写为
NA const ZA
P 2
(1.2)
设转子磁极 N 极初始角度为 0 (初始位置下的解耦角 NA ,可以通过旋转学习或者静止学 习获得) ,运行后通过编码器测到的角度增量为 m (机械角) ,那么当前位置下的转子磁极当 前角度 current (当前位置下的解耦角 NA )为
ˆ。 坐标系的角度偏差为 r r
华南理工大学 自动化学院 游林儒教授实验室文档
ˆ q
is
无传感器内嵌式同步电机转子磁极位置检测技术研究
无传感器内嵌式同步电机转子磁极位置检测技术研究一、概述随着电力电子技术的飞速发展,内嵌式永磁同步电机(IPMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、家用电器、风力发电以及航空航天等领域得到了广泛应用。
传统的电机控制方法往往依赖于位置传感器来实时检测转子的磁极位置,这不仅增加了系统的复杂性和成本,同时也降低了系统的可靠性。
无传感器内嵌式同步电机转子磁极位置检测技术的研究成为了当前的热点和难点。
无传感器技术旨在通过利用电机自身的电气和物理特性,在不依赖外部传感器的情况下,实现对电机转子磁极位置的精确检测。
对于内嵌式永磁同步电机而言,由于其独特的结构特点和磁路设计,使得其电气参数和运行状态与转子位置之间具有密切的关系。
研究无传感器内嵌式同步电机转子磁极位置检测技术,对于提高电机的控制性能、降低系统成本以及提升系统可靠性具有重要意义。
针对无传感器内嵌式同步电机转子磁极位置检测技术的研究已经取得了显著的进展。
学者们通过深入研究电机的电磁特性,提出了基于高频信号注入、定子电流和电压观测等方法的无传感器位置检测技术;另一方面,随着人工智能和机器学习等技术的发展,基于数据驱动的无传感器位置检测方法也受到了广泛关注。
这些方法各有优劣,适用于不同的应用场景和电机类型。
尽管无传感器内嵌式同步电机转子磁极位置检测技术已经取得了一定的成果,但仍然存在一些挑战和问题。
如何在宽调速范围内实现精确的位置检测、如何降低位置检测的误差和噪声、如何提高位置检测的实时性和稳定性等。
本文将对无传感器内嵌式同步电机转子磁极位置检测技术进行深入研究和探讨,以期为解决这些问题提供新的思路和方法。
无传感器内嵌式同步电机转子磁极位置检测技术是电机控制领域的一个重要研究方向,具有重要的理论意义和实用价值。
通过深入研究电机的电磁特性和控制策略,结合现代信号处理技术和人工智能方法,相信未来无传感器技术将在内嵌式永磁同步电机的控制中发挥更加重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁直线同步电机无位置传感器动子位置辨识王利;卢琴芬;叶云岳【摘要】In order to estimate mover position and speed of permanent linear synchronous motor (PMLSM) without position sensor, position sensing via flux linkage variation had been used. During the calculation, mean value of flux linkage was used twice to eliminate the flux linkage drift caused by open-loop electromotive force ( EMF) integration instead of traditional filter, and dead-time compensation algorithm was adopted to reduce the difference between calculated and actual phase voltage. Control circuit was built to research air-cored PMLSM, estimation error was analyzed during the operation from 1 Hz to 5Hz, and influence of motor parameters like resistance and inductance were analyzed finally. By measurement, root mean square error of mover position estimation reduced to 0.0240 rad at 3 Hz. It is showed mover information of PMLSM could be obtained based on flux linkage variation.%为了获取无位置传感器伺服系统中永磁直线同步电机的动子位置和速度,采用基于磁链变化的动子位置检测方法,利用两次磁链中值代替传统滤波器来快速消除反电势纯积分造成的磁链漂移现象,并采用死区补偿算法解决低速状态下重构相电压与实际相电压差值较大的问题.以空心式永磁直线电机为研究对象,分析1 ~5 Hz运行时的动子位置估算误差,以及电机参数对动子位置估算结果的影响.通过实验测得当运行速度为3 Hz时动子位置估算结果的均方根误差为0.024 rad,误差较小.实验结果表明,基于磁链变化的动子位置估算方法能够获得永磁直线电机在低速运行时的动子位置信息.【期刊名称】《电机与控制学报》【年(卷),期】2012(016)006【总页数】6页(P7-12)【关键词】直线电机;动子位置辨识;无位置传感器控制;矢量控制;反电势【作者】王利;卢琴芬;叶云岳【作者单位】浙江大学电气工程学院,浙江杭州310027;浙江大学电气工程学院,浙江杭州310027;浙江大学电气工程学院,浙江杭州310027【正文语种】中文【中图分类】TM359.40 引言直线电机可以将电能直接转变为直线运动的机械能,省去了齿轮、链条等中间传动机构,可以极大地简化系统结构,降低传动损耗[1]。
其中永磁直线同步电机具有体积小、推力密度高等优点,因而广泛应用于伺服控制系统中。
交流调速系统中,为了实现高精确度的速度和位置控制,常采用矢量控制或者直接转矩控制。
无论哪种控制方式,都需要高精确度的电机速度和位置信息,这些信息通常由光电编码器、测速发电机、旋转变压器等传感器获取。
直线电机一般使用直线光栅检测动子速度和位置,加装这些传感器增加了系统的成本和复杂性,降低了系统的机械抗干扰能力,而且速度和位置传感器对安装环境要求较高,比如直线光栅对安装面的平整度要求非常高[2]。
针对机械式的位置和速度传感器在某些应用场合受限的情况,近些年研究人员提出了多种无位置传感器旋转电机转子位置估算方法。
如基于反电势的反电势观测法,基于永磁同步电机凸极效应的高频信号注入法,基于状态观测器的自适应观测器法和卡尔曼滤波器法等[3-7]。
基于反电势的转子位置估算方法的优点是计算量小,易于实现,但是电机低速运行时反电势很小,而且转子磁链对定子阻抗变化敏感,导致该方法在低速运行时的电机转子位置估算精确度有所下降。
高频信号注入法基于电机的凸极效应(固有凸极或饱和凸极)估算转子位置,这种方法要求电机的凸极效应比较明显,对于表贴式一类凸极效应不明显的隐极电机,该方法的转子位置估算精确度不理想,此外高频信号注入法还需要额外的滤波器,滤波器的设计是高频信号注入法应用的难点。
基于状态观测器的方法具有较好的鲁棒性,不过实时计算量大,动态性能差于前两者。
基于磁链变化的转子位置检测方法是反电势观测法的延伸,也可称为反电势积分法,这种方法同样具有易于实现的优点,不过在低频下转子(直线电机为动子)位置估算结果容易受到干扰[8]。
直线电机一般在较低的频率下即可达到较高的直线速度,所以大多数直线电机伺服系统实际运行频率都比较低,反电势比较小,这增大了反电势积分法应用时有效信号的提取难度,目前对该算法的研究大多数还是针对较高运行频率的直线电机[9-11],如何提高直线电机低频运行时的动子位置估算精确度是反电势积分法研究的重点和难点。
本文针对空心式永磁直线同步电机的动子位置和速度估算进行研究,对直线电机低速运行时出现的磁链漂移问题进行分析,通过磁链中值和死区补偿算法有效解决了反电势积分引起的磁链漂移问题,提高了直线电机低速运行时的动子位置估算精确度,最后分析了电机参数变化对动子位置估算精确度的影响。
1 基于反电势积分的动子位置估算算法在α-β静止坐标系下,永磁同步电机的电压方程[12-14]为磁链方程为式中:uα、uβ,iα、iβ,ψα、ψβ 分别为定子电压,电流和磁链在α-β坐标系下的分量;Rs为定子电阻;ψPM为永磁体磁链;Ld、Lq为定子绕组的d、q轴电感;θr为动子位置。
对于隐极式永磁直线电机,L2≈0,定子电压方程可以简化为定义L1和L2分别为定子磁链则可表示为式中:ωr为角速度;v为速度;τ为电机极距。
2 永磁直线电机矢量控制矢量控制是应用最为广泛的永磁同步电机控制策略,其中采用转子磁场定向的矢量控制可以实现转矩电流分量和励磁电流分量的解耦控制。
矢量控制的类型包括id=0控制,最大转矩电流比控制,cosφ=1控制等,其中id=0矢量控制的思想就是使定子电流中只含交轴分量,这种控制方法具有算法简单、转矩性能好等优点,广泛应用于电机调速系统中。
图1为无位置传感器矢量控制原理图,PMLSM为空心式永磁直线同步电机,采用id=0的动子磁场定向矢量控制策略,实现电流,速度双闭环控制。
动子位置信息由动子位置估算器获得。
速度偏差作为速度调节器的输入,速度调节器的输出作为电流调节器的输入,电流调节器的输出经过空间矢量脉宽调制(space vector pulse width modulation,SVPWM)得到三相全桥各个全控管的开关状态,由此驱动智能功率模块(intelligent power modules,IPM)输出幅值和频率可调的斩波电压,使直线电机跟随指定速度运动。
图1 永磁直线电机无位置传感器矢量控制系统Fig.1 PMLSM sensorless vector control system3 实验及结果分析3.1 实验平台实验电机为空心式圆筒永磁直线电机。
电机电感Ld=16 mH,Lq=18.5 mH,电枢相电阻Rs=15.82 Ω,极距τ=0.025 5 m,反电势常数为30 V/(m/s),推力常数为90 N/A。
电流传感器采用LEM公司的LTS 6-NP,选择量程范围为-3~3 A。
功率模块为三菱DIPIPM-PS21564(15 A/600 V)。
控制芯片采用TI的TMS320F28335浮点处理器。
3.2 磁链零漂的抑制磁链由反电势积分获得,而开环反电势纯积分会带来积分漂移的问题,反电势信号中很小的直流分量都可能使积分器输出达到饱和。
直流分量可以通过高通滤波器滤除,但是由于直线电机大多在低频下运行,很难设计恰当的高通滤波器只滤除直流分量而对实际的磁链不产生衰减,此外滤波器带来的信号延迟问题很难解决。
针对直线电机的特殊性,本研究采用磁链中值法消除磁链漂移,具体实现方法为统计上个电机运行周期的磁链中值,实际磁链为反电势积分得到的磁链与上周期的磁链中值的差值,可以用式(9)描述这一过程,即式中:ψint为反电势积分得到的磁链初始值;ψmean为磁链中值。
利用DSP统计上个电机运行周期的磁链最大值和最小值,两者的平均值即为磁链中值。
设置电流采样频率为载波频率,磁链统计个数N应当满足式中:fc为载皮频率;fr为调制波频率。
调制波频率和速度相关,由直线电机速度公式可知式中vref为给定速度。
实际程序中指定速度都需要经过斜坡函数处理,所以这里的给定速度为斜坡函数的输出速度。
磁链零漂消除结果如图2所示。
图2中,ψαint为积分得到的初始磁链,ψα为采用磁链中值法处理之后的磁链结果。
图2 消除磁链漂移Fig.2 Elimination of flux linkage drift通过多次实验发现,低频下磁链漂移均是逐渐增大或逐渐减小的,说明系统中直流扰动分量具有一致性,对于这种具有趋势性的磁链变化,经过一次磁链中值消除积分漂移之后得到的磁链关于零轴不对称,需要经过第二次磁链中值消除零漂,经过两次磁链中值消除积分零漂后,才可使磁链关于零轴对称。
由于两次采用中值法消除反电势积分后的磁链零漂,系统在前两个运行周期处于两个磁链中值的统计过程,输出磁链误差很大,此时的计算结果不可使用。
因为在零速下无反电势,所以基于反电势积分的动子位置估算算法需开环启动,而磁链中值的初始化在开环启动过程中即可完成,对后续的速度闭环时动子位置计算无影响。
在磁链漂移趋势很大的系统中,采用两次磁链中值法消除磁链漂移在每周期磁链中值切换时刻都会产生磁链输出跳变,如图3中的虚线框所示。
图3中,ψint为积分得到的磁链初始值,ψout1为经过第一次磁链中值法之后的磁链输出结果,ψout2为经过第二次磁链中值法之后的磁链输出结果。
磁链跳变是因为磁链漂移趋势变化较大,导致磁链中值的明显变化,而磁链中值是周期性更新的,这样在磁链中值更新时刻必然导致输出磁链的畸变。
直线电机在低速运行时,死区效应和电机参数变化会引起磁链漂移趋势增大,为了提高动子位置估算精确度,需要消除这些引起磁链变化趋势增大的不利因素。