一个平面双连杆柔性机械臂实验平台
倒立摆姿态控制模型
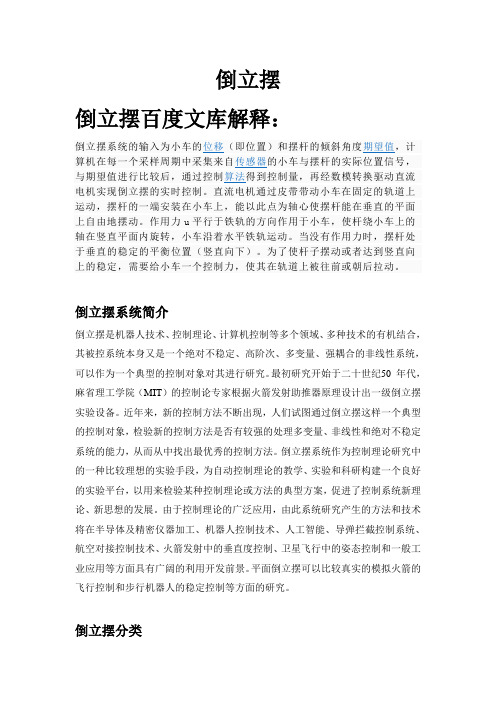
倒立摆倒立摆百度文库解释:倒立摆系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。
直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。
作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。
当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。
为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。
倒立摆系统简介倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。
最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。
近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。
倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。
由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。
平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。
倒立摆分类倒立摆已经由原来的直线一级倒立摆扩展出很多种类,典型的有直线倒立摆,环形倒立摆,平面倒立摆和复合倒立摆等,倒立摆系统是在运动模块上装有倒立摆装置,由于在相同的运动模块上可以装载不同的倒立摆装置,倒立摆的种类由此而丰富很多,按倒立摆的结构来分,有以下类型的倒立摆:1) 直线倒立摆系列直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件,可以组成很多类别的倒立摆,直线柔性倒立摆和一般直线倒立摆的不同之处在于,柔性倒立摆有两个可以沿导轨滑动的小车,并且在主动小车和从动小车之间增加了一个弹簧,作为柔性关节。
温室番茄采摘机器人系统设计

温室番茄采摘机器人系统设计姬丽雯1,2,张 豪1,吴 丹1,2,高 帅1,2(1.江苏农林职业技术学院机电工程学院,江苏句容 212400; 2.江苏省现代农业装备工程中心,江苏句容 212400)摘要:设计了一种应用于温室番茄采摘的机器人,该机器人可以在温室中自动规划路径,并识别和采摘成熟番茄。
设计以分布式计算系为主控制网络,以激光雷达进行移动机器人的地图构建与定位,视觉系统智能识别番茄进行3D定位。
通过视觉系统软件开发结合双目相机硬件结构实现果实的精准识别和定位。
关键词:番茄采摘机器人;路径规划;视觉系统0 引言在果蔬作业生产链中,采摘作业是整个生产链中最耗时、费力的环节,且采摘作业存在季节性强、劳动强度大、投入费用高的特点,因此农业采摘机器人研究发展有极强的现实意义[1-2]。
国内农业机器人发展相对于国外比较晚,但经历多年的不断的研究和发展,也取得了一定的成就。
江苏大学研制了番茄采摘机器人,将RGB颜色空间转换成HIS颜色空间。
王沈辉等人基于神经网络,创建了双目立体视觉实验的平台。
魏博等设计了一种欠驱动式柑橘采摘末端执行器,通过三个双连杆并联式手指充分抓握和偏转融合控制,实现柑橘的稳定采摘。
使用的末端执行器具有适应性强、抓取稳定等优点,但只在手指内部贴有软硅橡胶的设计无法避免果实采摘时的破损,将影响果实的品质[3]。
于丰华等将机器人的机械臂扩展到6自由度,机械臂搭载了附有薄膜压力传感器的柔性手爪,基于R-FCN卷积神经网络视觉识别技术,设计了以番茄为采摘对象的移动机器人,但是机器人必须通过巡线相机识别温室内定位胶带来完成巡检和采摘,移动的灵活性受到限制[4]。
虽然采摘机器人的研究较多,但研究深度还有待进一步提高。
本文设计了一款温室番茄采摘机器人,采用同时定位和地图构建实现机器人的路径规划,双目深度相机实现对成熟番茄的识别和定位,搭载柔性仿生夹爪的6自由度机械臂实现目标番茄的抓取和放置。
1 采摘机器人系统功能设计番茄的培育模式主要有地面土培和基质高架培育,其中高架基质栽培可改善劳动姿势,减轻劳动强度,实现省省力化栽培而且能够克服连作障碍,实现清洁化生产[5]。
工业机器人实验报告

工业机器人拆装实验报告学校:湖南大学学院:机械与运载工程学院专业:机自1201姓名:***201211020121徐文达201211010122纪后继201210010108刘建国201204010110前言六自由度工业机器人是个较新的课题,虽然其在国外已经具有了较完善的研究,但是在国内对于它的研究依旧停留在较低的水平上。
机器人技术几种了机械工程、电子技术、计算机技术、自动化控制理论及人工智能等多学科的最新研究成果,代表机电一体化的最高成就,是当代科学技术发展最活跃的领域之一。
在传统的制造领域,工业机器人经过诞生、成长、成熟期后,已成为不可缺少的核心自动化装备,目前世界上有近百万台工业机器人正在各种生产现场工作。
在非制造领域,上至太空舱、宇宙飞船、月球探索,下至极限环境作业、医疗手术、日常生活服务,机器人技术的应用以拓展到社会经济发展的诸多领域。
一、六自由度机械手臂系统的介绍在本次综合创新型试验中我们用到的是六自由度机械手,其是典型的机电一体化设备,在该试验中我们主要是在对其机械臂进行拆卸,然后认真观察其内部机械结构,而后再进行组装,最后再运行整个机械臂并检测其运动功能。
在实验中我们所用的机械手臂实物图:六自由度机械手臂是一套具有6个自由度的典型串联式小型关节型机械手臂, 带有小型手抓式;主要由机械系统和控制系统两大部分组成,其机械系统的各部分采用模块化结构,每个部分分别由一个伺服电动机来带动,每个电动机在根据控制要求以及程序的要求来运动从而实现运动要求;其机械系统主要包括以下六个组件,如图所示PSC Port0,1,2,3,4,5六个组件也就是底座,臂膀,手腕及夹持手指。
每个组件由一个伺服电机驱动关节运动,组件1也就是由PSC Port0构成的底座,其主要作用就是完成整体的水平面转动,转动范围360度;PSC Port1,2,3这三个组件既是臂部,控制手臂在与底座旋转的垂直平面转动其转动范围为180度也即是控制手臂的俯仰;PSC Port4这个组件也使机械关节,既是手部关节,可完成机械手部的任意转动,确定机械手的夹持方向;PSC Port5机械手钳口,完成对物体的夹持。
花椒采摘机器人机械臂的运动学分析及工作空间求解

43T
S04
0
04 0 0 0 10
_0
0 0 1_
05 —s05 0 0 _
2 机械臂的逆运动学分析
机械臂的逆运动学问题是指已知末端关节的空
(5)
间位姿,即齐次变换矩阵5T,求解其他关节变量的
相关运动参数,即各关节角度0Z。
首先,依据运动学方程求解01o运动学方程为
0 54T =
0
1 d5
(6)
s05 — 05 0 0
C0 i
—s0i
0
a i—1
s0i
c0 iCa i—1 —sa i—1 ―sa i—1 d
(1)
s0 i sa i—1 c0 isa i—1 ca i—
cai—1di
0
0
0
1
依据式(1)可得机器人手臂各个关节之间的变 换矩阵分别表示为
C01 —s01 0 0 -
10T
S01
01 0 0
(2)
0
0 1 d1
3
qs
0
1600
0
0° 〜120°
图2机械臂坐标系 Fig. 2 Coordinate of the picking manipulator
4
q4
0
2 060
0
0° 〜180°
5
q5
1 340
0
90
0° 〜180°
= Rot(x , i_1 )Tran(ai_1 , ,0)Rot(z ,z )Tran(0 , di )=
p y = s a 1 ( 2 C2 a + 3 ^23 — p d s5 234), z = — a?s 2 —
Q3S23 +d1 — d5^ 234,其中:S234 = sin (1 +02 +。3);
五自由度桌面级多功能机械臂设计

五自由度桌面级多功能机械臂设计1. 引言1.1 研究背景通过对研究背景的分析,可以发现目前市场上的五自由度桌面级多功能机械臂存在着一些问题,如在工作精度、灵活性和智能化程度方面还有待提升。
有必要对这些机械臂进行深入研究,探索如何改进其设计,提高其工作效率和性能。
这样不仅可以满足现代工业生产的需求,还可以推动机器人技术的发展,促进人机合作的进一步深化。
1.2 研究意义五自由度桌面级多功能机械臂设计具有灵活、精准、高效的特点,能够完成多种复杂任务,满足不同应用场景的需求。
通过研究和设计这种机械臂,可以进一步推动机器人技术的发展,促进智能制造的普及和应用,提高生产效率和产品质量,促进产业升级和创新发展。
开展五自由度桌面级多功能机械臂设计的研究具有重要的理论意义和实际应用价值,对推动机器人技术的进步和应用具有重要的意义。
2. 正文2.1 机械臂动力学设计机械臂动力学设计是实现机械臂运动和控制的重要环节。
在设计过程中,需要考虑到机械臂的动力学模型,以便进行运动规划和轨迹控制。
通常,机械臂的动力学设计包括以下几个方面:1. 负载分析:首先需要对机械臂的负载情况进行分析,包括负载的大小、重心位置、惯性矩阵等参数。
这些参数将影响机械臂的运动学和动力学性能。
2. 运动学分析:通过建立逆运动学方程和正运动学方程,可以确定机械臂的关节角度和末端执行器的位置之间的关系。
这是进行轨迹规划和控制算法设计的基础。
3. 动力学建模:根据机械臂的结构和工作原理,可以建立机械臂的动力学模型。
这包括力学模型、惯性模型和阻尼模型等,用于模拟机械臂的运动和受力情况。
4. 控制算法设计:基于动力学模型,可以设计出适合机械臂运动控制的算法,如PID控制、模糊控制、神经网络控制等。
这些算法可以实现机械臂的准确运动和轨迹跟踪。
机械臂动力学设计是实现机械臂运动和控制的关键步骤,对于提高机械臂的性能和精度具有重要意义。
通过合理的动力学设计,可以实现机械臂的高效工作和多功能应用。
基于MapleSim的六自由度柔性机械臂动力学仿真
Ke r s: e bl o o n y wo d f xi e r b ta n;mu t- o i n mo ei g;me h to i s l l d ma d l i n c ar n c ;mo e i g a d smult n d ln i n ao i
的需要 。多领域建模 必须 采用新 的建 模理 论 和工具 ,
为建模仿真 、 智能规划 ; 慧 , 士, 阎 博 副教授 , 究方 向为 军用软 件 研
与计算机仿真 。
・
2 2・ 0
计算机技术 与发展
第 2 卷 1
实现不同领域模型之间 的无缝集成和信息交互 。
文中采用 了非 因果建模思想 , 使用 Mal i p Sm建模 e
第2卷 lห้องสมุดไป่ตู้
第 1 O期
计 算 机 技 术 与 发 展
COMPU TER ECHNOL T OGY AND DEVEL OPMENT
21 年 1 01 O月
V0 . l N . 0 I2 o 1 0c . 2 l t O l
基 于 Ma lSm 的 六 自 由度 柔 性 pe i 机械 臂 动 力 学仿 真
弹簧 阻尼系统
仿 真工 具在统一的框 架 内建立 了柔性机械臂 的多领域 模 型 , 复杂机 电系统 的运行 特性 进行 了研究 。研究 对 结果证 明 , 多领域建模 方法可 以明显缩短建模时间 , 提 高仿真 准确度 , 足复杂机 电系统仿 真的要 求 。 满
1 多领 域 建模 技 术
O 引 言
柔性机械臂在工 作过程 中易产生 振 动和变 形 , 如
果 不采取有效措施 对其振 动进 行控制 , 会严 重影 响末
LQR控制的柔性机械臂快速定位方法研究
LQR控制的柔性机械臂快速定位方法研究作者:王清清,方传智,李梦来源:《赤峰学院学报·自然科学版》 2015年第7期王清清,方传智,李梦(安徽工程大学机电学院,安徽芜湖 241000)摘要:为了快速实现柔性机械臂的精确定位,减小机械臂移动过程中的抖动,本文利用Lagrange方法建立了柔性机械臂的动力学模型,并在此基础上利用线性二次最优控制LQR (Linear Quadratic Regulator)方法设计了机械臂快速定位控制器.在LabVIEW虚拟仪器软件中进行了仿真实验验证,结果表明:利用 LQR方法控制的机械臂系统响应更快,能更快地到达目标位置,速度提高约2.8倍,大幅减小了达到稳态的时间,同时削弱了运动过程中产生的抖动,机械臂的整体性能得到提高.关键词:柔性机械臂;精确定位;LQR控制器;系统响应中图分类号:TP241 文献标识码:A 文章编号:1673-260X(2015)04-0028-04随着现代工业化生产率大幅提升,多是通过现代自动化的生产线所得,而未来的机械人的发展一定是高速、精密、大承载和轻量化等方向.在特殊行业以及特殊环境中的特种微型机器人,在结构的设计过程中,也需要考虑的重要因素是构件的柔性变形以及影响其运动性能和动力性能等.在研究柔性机器人的研究中有三类[1],包括针对连杆柔性、关节柔性和综合考虑两者,研究前两者的较多,综合连杆柔性和关节柔性因素的文献较少,具有一定的发展前途.目前,大多数的机器人开始向柔性方向发展,由于机器人的传动机构也是多采用谐波减速器等,所以机器臂在工作的过程中就会产生抖动的现象,这也是本文研究的一个重点问题.大多研究机器人的国内外的专家学者,都是将关节为常值刚度条件进行展开,来研究柔性关节的机器人建模与控制问题[2].机器人的刚度增强的原因[3]有很多种,例如减速器内部的齿轮在工作期间的离心力、惯性和最为关键的,一对齿轮在啮合时,啮合点随着齿轮的转动会发生实时的变化[4],形成啮合线,在这些原因中,都会使机器人在运动过程中,关节的刚度成动态的表现.关节动态刚度是通过机构系统的振动环境进行判断预测,而预测环境包括对已知系统和响应过程,求解激励[5].朱长春等在振动环境试验响应的神经网络预测方法[6]中提到预测、响应结构抖动环境可以将神经网络运用其中.雷晓燕等在高架轨道诱发环境振动预测与评价研究中对高架轨道结构的环境运用有限元瞬态分析方法针对抖动进行预测与分析.邓长华等在管道联接件参数识别的行波法[7]中,识别管道结构联接件处物理参数运用行波理论的方法,上述文献都是对对结构的振动分析,通过已知系统和响应过程,求解激励.庄未等在运动状态下柔性关节机器入振动环境预测[8]中的结论是判断预测关节动态刚度和阻尼是机构系统激励的基础,针对机械臂系统的3自由度[9],提出相结合行波理论与关节旋转变换矩阵,预测下机器人的柔性关节在运动状态中的振动情况以及实验分析,建立机器人机构系统的波动方程.柔性机械臂作为柔性多体系统动力学分析与控制理论研究的重要对象,是新型机器人的重要组成成分,在现代工业和国防领域中占有十分重要的地位.相对于传统的刚性机械臂,柔性机械臂具有更好的高速操作性,更低的能耗,所以拥有更大的工作空间.由于柔性机械臂在动作时会产生弹性变形,从而带来机械臂动力学系统方程的非线性、强耦合等问题,这给柔性机械臂的分析和控制带来了困难.近年来,国内外学者致力于柔性机械臂的控制分析问题,提出了多种控制方案.非线性反馈控制通过求解逆动力学方程[10]计算控制力矩以实现近似解耦和线性控制,该方法以机械臂动力学模型精确已知为前提,对于具有未知负载、存在外界扰动的机械臂难以保证控制性能;自适应控制方法能够通过自适应方法[11~12]辨识机械臂参数,不需要预先已知,但是对于高速运行的柔性机械臂控制需要在线计算大量位置、速度等非线性函数,计算量大且控制器实现困难;神经网络方法[13~14]通过学习模型中的未知信息来逼近机械臂系统的动力学模型以实现控制,但是该方法学习速度较慢,计算量过大,难以满足实时性要求.柔性机械臂控制系统的最优控制要兼顾系统响应和系统控制两方面,综合考虑使性能达到最优.本文在分析现有机械臂控制方法的优缺点后,选取线性二次最优控制方法(LQR)作为机械臂动力学系统的控制器.使用LQR方法[15~16]的优点是不必根据要求的性能确定闭环极点的位置,只需要根据系统的响应曲线寻找出合适的状态变量和控制量的加权矩阵即可,因为求得的控制器是误差指标J最优意义下的控制器,所以系统的性能也是误差指标意义下最优的.1 柔性机械臂的动力学模型本文以电机和齿轮减速箱驱动的单连杆柔性机械臂作为研究对象,模型建立过程如下:系统的弹性势能:T0表达式中各参数定义:kt为电机转矩常量,km为电机反电动势,kg为齿轮箱总传动系数,Rm为电机线圈电阻值,Vm为外加电压,ηm为电动机效率,ηg为齿轮箱效率.将公式(5)分别代入公式(6)、(7)并求解得到以下结果:以上就是柔性机械臂系统的动力学模型.将式(9)、(10)的模型转换成状态方程,便于构建控制器对模型进行最优控制,转换后的方程如下:2 建立LQR控制器LQR控制器的设计原理是线性二次最优控制思路,在系统由于本身因素或者外界干扰影响而失去平衡状态时,该控制器能在较低能耗下控制系统各分量回归接近于平衡状态[17].经过控制的系统实现可线性化,所以解答简单,适用于对柔性机械臂系统的控制.对线性系统的状态空间方程描述一般如下:x(t)=Ax(t)+Bu(t)(12)y(t)=Cx(t)(13)其中A,B,C分别为时间的矩阵函数,最优控制的目的是将系统由非平衡状态控制返回接近至平衡状态.LQR方法给定了决定性能的目标函数:其中u不受限制,Q为半正定矩阵,是对状态变量的加权矩阵,R为正定矩阵,是对输入量的加权矩阵.对于本文建立的柔性机械臂动力学模型,相应的LQR控制器指标函数可以表达为:只要上式的J达到最小,就实现了LQR控制器对柔性机械臂的最优控制.3 仿真实验及结果分析对式(11)模型中的各参数计算赋值:Rm=2.6?赘,k=0.8,kt=0.00767N·m/A,km=0.00767V/(rad/s),kg= 70,J1=2.6×10-3kg·m2,J2=3.5×10-3kg·m2,Be=4×10-3 Nm·s/rad,ηg=0.9,ηm=0.69.将以上参数代入式(11)计算,结果转化为式(12)、(13)的模式如下:在LabVIEW软件中搭建了LQR模型,模型的参数经过试验比较选择如下:本文研究的柔性机械臂性能评定指标是定位角θ和机械臂移动过程中的摆角α,要求θ在响应过程中能迅速达到目标定位值,要求α能迅速达到期望值0,并且在响应过程中出现尽量少的抖动.将上述机械臂动力学模型参数和LQR控制器模型参数加载到控制程序中,在系统的阶跃响应情况下比较加入控制器和未加控制器的响应结果,结果如下图1所示.将图1中表示θ和α的阶跃响应参数提取列表如下.得到反馈的LQR控制器最优参数为:K=[1.15 -2.51 0.22 -0.04].分析图1中两组阶跃响应图:图(a)中定位角θ的响应曲线经过LQR控制前后有明显区别,在设定一个共同的期望定位角后,LQR控制的系统相对无控制的系统响应时间较快,从表1可知无控制的θ角达到期望值的时间为7.7s,而LQR控制的θ角达到期望值的时间仅为2.75s,效率提高近2.8倍,柔性机械臂的定位速度得到大幅提高.摆动角α表示机械臂移动过程中的抖动强弱,是机械臂稳定性评估的重要参数.从图(b)结合表1可知,施加LQR控制前后,α到达期望值0的时间接近,分别为控制前的2.2s和控制后2.1s.但是未加LQR控制的α响应曲线在达到期望过程中存在较多峰值,抖动效果太强,在工作过程中会对作用对象造成破坏,长时间抖动也会影响机械臂本身寿命和精度.而经过LQR控制的α角在响应过程中只存在一个较高峰值,随后迅速削弱向期望值0逼近并保持,说明经过LQR方法控制的系统自动调节平衡能力远强于未加LQR控制的系统,同时大幅度削弱了抖动,对作用对象和柔性机械臂都有较好的保护.分析了LQR控制系统响应的优越性后,作出LQR控制的柔性机械臂系统的输出效果曲线,如图2所示.图2中定位角θ稳定上升到目标位置,控制效果偏差从初始位置迅速降低到0,由于LQR系统很好的消除了机械臂动作过程中的抖动,摆动角α输出曲线基本保持在0位置,图1、图2的分析结果表明经过LQR控制的柔性机械臂系统能够实现快速精确定位,并且能有效削弱定位过程中机械臂的抖动.4 总结目前,机器人的方向开始往柔性方向发展,而机器人的传动机构多采用谐波减速器等,所以机器臂在工作的过程中就会产生抖动的现象,这也是本文研究的一个重点问题.柔性机械臂的快速定位和抖动消除是一个复杂的问题,建立柔性机械臂系统控制器模型不仅要考虑定位的快速准确,更要保证模型能够削弱机械臂动作过程中的抖动.本文提出利用LQR 方法建立柔性机械臂的控制模型,在LabVIEW软件中进行了仿真实验.实验结果表明,LQR方法控制后的柔性机械臂可以快速精确地到达目标位置,并且可以大幅削弱定位过程中机械臂的抖动,该方法效果稳定快速,能够用于控制柔性机械臂的快速定位.参考文献:〔1〕姜春福,余跃庆.神经网络在机器人控制中的研究进展[J].北京工业大学学报,2003(l).〔2〕褚明,贾庆轩,孙汉旭,等.空间柔性操作臂的动力学/控制耦合特性研究[J].北京邮电大学学报,2008,31(3):98-102.〔3〕刘晓平,李景溃,员超,等.120kg点焊机器人运动状态下的动态特性分析[J].中国机械工程,2002,13(13):1137-1140.〔4〕刘国华,李亮玉,赵继学.考虑反向齿面啮合力的齿轮系统时变啮合刚度的研究[J].天津工业大学学报,2006,25(6):54—57.〔5〕庄未,刘晓平.运动状态下柔性关节机器入振动环境预测[J].北京邮电大学学报,2009(5).〔6〕朱长春,王懋礼,曾启铭,等.振动环境试验响应的神经网络预测方法[J].振动与冲击,2007,26(4).〔7〕邓长华,任建亭,任兴民,等.管道联接件参数识别的行波法[J].应用力学学报,2007,24(4):584-587.〔8〕庄未,刘晓平.运动状态下柔性关节机器入振动环境预测[J].北京邮电大学学报,2009(5).〔9〕宋西蒙.倒立摆系统LQR一模糊控制算法研究[D].西安电子科技大学,2006.〔10〕孙迪生,王炎.机器人控制技术[M].北京:机械工业出版社,1997.〔11〕崔美瑜,徐世杰.基于直接自适应控制的挠性航天器高精度姿态控制[J].航天控制,2011,29(5):35-39.〔12〕高秀兰,鲁开讲,等.并联机构非线性PID自适应控制[J].机械设计与制造,2012(12):125-127.〔13〕刘成良,等.神经网络在机器人运动控制中的应用研究[J].机械科学与技术,2003,22(2):226-228.〔14〕姜春福,等.神经网络在机器人控制中的研究进展[J].北京工业大学学报,2003,29(1):5-11.〔15〕谭文龙.一种改进的二级倒立摆LQR控制器参数优化方法[J].重庆理工大学学报,2012,26(3):85-88.〔16〕宋西蒙.倒立摆系统LQR—模糊控制算法研究[D].西安电子科技大学,2006. 〔17〕李洋.基于LQR算法两轮自平衡小车的系统设计与研究[D].太原理工大学,2011.。
机械臂论文
河南理工大学本科毕业设计(论文)说明书摘要用于再现人手的的功能的技术装置称为机械手,机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业机器人的技术水平和应用程度在一定程度上反应了一个国家工业自动化的水平,随着工业自动化的普及和发展,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运, 可以更好地节约能源和提高运输设备或产品的效率,减少其他运输工具的局限,从而满足现代经济发展的要求。
本机械手主要用于光轴的搬运工作,能够配合机床(如锻床、数控机床、组合机床)或装配线等进行圆柱形工件搬运。
本机械手将采用三个自由度,为气压驱动。
本设计首先对机械手的手部、手腕、手臂等各个部分进行设计计算,然后选择合适的传动方式、驱动方式,搭建机器人的结构平台;其次,在气动系统的基础上对电气控制系统(PLC)进行了合理设计和布线。
其动作过程包括:下降、夹紧、上升、慢进、快进、慢进、延时、下降、放松、上升、慢退、快退、慢退;其操作方式包括:回原位、手动、单步、单周期、连续;完成搬运机械手搬运工件的最终要求。
关键词: 机械手,搬运,结构,气压,可编程控制器(PLC)。
AbstractAbstractThe technology device used to reproduce the staff function is called a mechanical hand, the mechanical hand is imitate the action of the manpower, to achieve a given program, track and requirements automatically grab, handling or operation of automatic mechanical device. Robots can replace the hands of heavy labor, significantly reduce the labor intensity, improve working conditions, and improve labor productivity and automation level.The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, with the popularity of industrial automation and development, handling the application of mechanical hand gradually popularity, mainly in the automotive, electronic, mechanical processing, food, medicine and other areas of the production line or cargo transport, we can be more good to save energy and improve the transport efficiency of equipment or products, to reduce restrictions on other modes of transportation to meet the requirements of modern economic development.This manipulator is mainly used for metal optic axis handling work, can match with machine tools (such as forging bed, NC machine tools, combination machine tools) or assembly line of weight to realize cylindrical work pieces handling. The robot will use the three degrees of freedom for the pneumatic drive. First, I design and calculate the hand, wrist, arm and various parts of the mechanical hand. Then choose the proper drive method and transmission method, build the mechanical structure of the mechanical hand. Second, design and wire the electrical control system on the base of the pneumatic system of the manipulator. Their course of action should include: decline in clamping increased, slow forward, fast forward, slow progress, the extension of , the drop in, relax, rise, slow back, rewind, slow back; its operation, including: back in situ, manual, single-step, single cycle, continuous; and finally complete the final requirements of the handling robot porter pieces.Keywords: mechanical hand, transport, structure, pneumatic , programmable logic controller (PLC).河南理工大学本科毕业设计(论文)说明书目录摘要 (I)Abstract (II)第一章绪论 (5)1.1 选题背景 (5)1.2 机械手设计目的及意义 (5)1.3 机械手发展历史及现状 (6)1.4 国内外应用及发展趋势 (8)1.5 设计大纲 (9)第二章机械手方案设计及计算 (11)2.1 机械手的设计要求及技术参数 (11)2.1.1机械手的总体方案论证 (11)2.1.2 驱动方式的选择 (11)2.1.3 技术参数 (12)2.2 手部结构设计及计算 (13)2.2.1 手部设计要求 (13)2.2.2 手部选型及计算 (14)2.2.3 手部夹紧力和驱动力计算 (15)2.2.4 气缸的直径确定 (17)2.2.5 缸筒壁厚的设计 (18)2.3 腕部结构设计 (19)2.3.1 腕部设计要求 (19)2.3.2 腕部的总体设计要求如下: (20)2.4 臂部结构设计及计算 (20)2.4.1 臂部设计要求 (20)2.4.2 伸缩手臂的设计 (21)2.4.3 手臂伸缩气缸的尺寸设计 (22)2.4.4 导向装置 (23)2.4.5 平衡装置 (23)2.4.6 手臂升降气缸的尺寸设计与校核 (23)2.5 机身设计及计算 (24)2.5.1 回转机身设计 (25)2.5.2 尺寸设计及校核 (25)第三章气动系统的设计 (28)3.1 驱动方式的选择 (28)3.2 气动原理图 (28)3.2.1 气动控制系统简介: (28)3.2.2 各执行机构的调速 (30)第四章机械手的PLC控制设计 (31)4.1 PLC简介 (31)4.1.1 PLC的发展历史 (31)4.1.2 PLC的结构 (32)4.1.3 PLC系统的其它设备 (33)4.1.4 PLC的分类 (33)目录4.1.5 PLC的特点 (34)4.1.6 PlC的用途 (34)4.2 机械手动作PLC设计 (35)4.2.1 I/O接口简介 (36)4.3PLC设计 (36)4.3.1输入输出设备 (36)4.3.2 选择可编程控制器 (36)4.3.3 PLC的I/O分配如下: (37)4.3.4PLC外围接线图如下: (38)总结 (40)参考文献 (41)致谢......................................... 错误!未定义书签。
基于观测器的柔性关节机械臂滑模控制
基于观测器的柔性关节机械臂滑模控制黄华;李光;林鹏;杨韵;李庆【摘要】柔性机械臂在运动过程中会产生如扭曲、弹性、剪切等形变,给柔性机械臂的分析和控制带来困难。
为了满足柔性机械臂高性能的控制要求,提出将基于观测器的滑模控制方法用于柔性机械臂中,设计一个观测器观测柔性机械臂系统各个状态变量,并且采用滑模变结构设计控制器。
仿真结果表明,基于观测器的柔性关节机械臂滑模控制方法能够很好地观测到系统各个状态变量,且状态估计误差趋近于零,满足柔性臂的快速跟踪性要求,具有很好的实践意义。
%Flexible manipulator arm occurs twisted, elastic and shearing deformations in the process of movement, which brings difficulty to its analysis and control. In order to meet the requirements of high performance control of flexible arm, proposes the observer-based sliding mode control method for flexible manipulator, designs an observer to monitor the state variables of flexible manipulator arm system, and applies sliding mode variable structure to design the controller. The simulated result shows that the proposed method does well in observing the variables of the system and the state estima-tion error approaches to zero, which meets the fast tracking of flexible arm, and has good practical significance.【期刊名称】《湖南工业大学学报》【年(卷),期】2014(000)001【总页数】5页(P62-66)【关键词】柔性机械臂;滑模控制;状态观测器【作者】黄华;李光;林鹏;杨韵;李庆【作者单位】湖南工业大学电气与信息工程学院,湖南株洲 412007;湖南工业大学机械工程学院,湖南株洲 412007;湖南工业大学机械工程学院,湖南株洲412007;湖南工业大学机械工程学院,湖南株洲 412007;湖南工业大学机械工程学院,湖南株洲 412007【正文语种】中文【中图分类】TP368.4目前,关于机械臂的研究主要集中在机械臂是刚性的情况,但实际应用中,空间机械臂由于质量轻、体积小,所以必须考虑机械臂的柔性才能取得良好的控制精度和稳定性。
线驱动柔性机械臂的运动学分析
i n t h e ma n i p u l a t o r , a n d t h e p o s i t i o n a n d o r i e n t a t i o n o f t h e e n d — e f e c t o r o f t h e s o f t r o b o t i c ma n i p u l a t o r c a n b e a d j u s t e d b y c o n t r o l l i n g
p a p e r h a s n o a n y r i g i d s t r u c t u r e . T h e p e r i p h e r n n e c t s wi t h t h e s o t f r o b o t i c ma n i p u l a t o r b y t h e c a b l e s e mb e d d e d
The Ki n e ma t i c s Ana l y s i s o f A Ca bl e . dr i 、 e n S o f t Ro bo t i c M a ni ou l a t o r
Y u Xi a o j i n ( D e p a r t me n t o f Au t o ma t i o n , S h a n g h a i J i a o T o n g U n Ne r s i t y , S h a n g h a i 2 0 0 2 4 0 , C h i n a )
t h e l e n g t L v a r i a b l e s o f t h e c a b l e s . T h e s o t f r o b o t i c ma n i p u l a t o r i s ma d e o f e l a s t i c ma t e r i a l s a n d h a s i n in f i t e d e g r e e o f r f e e d o m, wh i c h ma k e i t t o b e h i g h l y s a f e a n d d e x t e r o u s . Ho we v e r , a t t h e s a me t i me , s o me d i ic f u l t i e s r i s e s u c h a s b u i l d i n g k i n e ma t i c a n d d y n a mi c mo d e l s a n d mo t i o n c o n t r o 1 . Ba s e d o n p i e c e wi s e c o n s t a n t c u r v a t u r e h y p o t h e s i s , a k i n e ma t i c mo d e l i s p r o p o s e d . I n t h i s me t h o d , t h r e e