卡西欧5800公路坐标正反算程序
卡西欧5800多功能实用坐标正反算小程序(附后方交会程序)
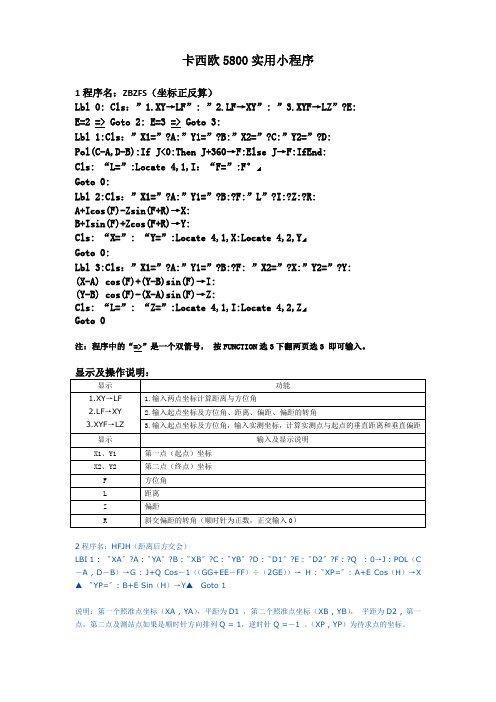
Goto0:
Lbl3:Cls:”X1=”?A:”Y1=”?B:?F: ”X2=”?X:”Y2=”?Y:
(X-A)cos(F)+(Y-B)sin(F)→I:
(Y-B)cos(F)-(X-A)sin(F)→Z:
Cls:“L=”: “Z=”:Locate4,1,I:Locate 4,2,Z◢
Goto0
注:程序中的“=>”是一个双箭号, 按FUNCTION选3下翻两页选3 即可输入。方Biblioteka 角L距离Z
偏距
R
斜交偏距的转角(顺时针为正数,正交输入0)
2程序名:HFJH(距离后方交会)
LBI 1 :〝XA〞?A :〝YA〞?B :〝XB〞?C :〝YB〞?D :〝D1〞?E :〝D2〞?F :?Q : 0→J : POL(C-A , D-B)→G : J+Q Cos-1((GG+EE-FF)÷(2GE))→H :〝XP=〞: A+E Cos(H)→X▲〝YP=〞: B+E Sin(H)→Y▲Goto1
显示及操作说明:
显示
功能
1.XY→LF
2.LF→XY
3.XYF→LZ
1.输入两点坐标计算距离与方位角
2.输入起点坐标及方位角、距离、偏距、偏距的转角
3.输入起点坐标及方位角,输入实测坐标,计算实测点与起点的垂直距离和垂直偏距
显示
输入及显示说明
X1、Y1
第一点(起点)坐标
X2、Y2
CASIO5800坐标正反算计算程序

CASIO5800坐标正反算计算程序CASIO 9860/5800坐标正反算计算程序1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:”K=”?K:”BIAN=”? Z:”α=”?B第2行:Prog “A”第3行:”X=”:N+Zcos(F+B)◢第4行:”Y=”:E+Zsin(F+B)◢第5行:”F=”:F◢第6行:Goto 0K——计算点的里程BIAN——计算点到中桩的距离(左负右正)α——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:”X1=”? C:”Y1=”?D: ”K1=”?K第2行:Lbl 0:Prog “A”第3行:Pol(C-N,D-E)第4行:List Ans[1]→I第5行:List Ans[2]→J第6行:Icos(F-J)→S:K+S→K第7行:Abs(S)>0.0001=>Goto 0第8行:”K1=”:K◢第9行:”BIAN=”:Isin(J-F)→Z◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号Z——偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-A→S:(Q-P)÷L→I第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E第4行:F+S(2P+SI)×90÷π→F4. 数据库(命名为A)第1行:K≤175.191=>Stop第2行:175.191→A:428513.730→N:557954.037→E:92°26′40″→F:0→P:1/ 240→Q:70.417→L:K≤A+L =>GoTo 1(第一缓和曲线,圆半径为240)第3行:245.607→A: 428507.298→N:558024.092→E: 100°50′59.4″→F: 1/240→P:1/240→Q:72.915→L: K≤A+L =>Goto 1(第圆曲线,半径为240)第4行:318.522→A: 428482.988→N:558092.538→E: 118°15′25.2″→F: 1/240→P: 0→Q: 55.104→L: K≤A+L =>Goto 1(第二缓和曲线,圆半径为240)第5行:373.627→A:428453.283→N:558138.912→E:124°50′4.5″→F:0→P:-1/180→Q:67.222→L:K≤A+L=>Goto 1:Stop(第一缓和曲线,圆半径为180)第6行:Lbl 1:Prog “XYF”A——曲线段起点的里程N——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(左负右正)Q——曲线段终点的曲率(左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)在9860中,程序中所有公式和部分函数结果均存储在ListAns列表数组中,要想多次调用最好随公式取出结果,并赋给变量。
卡西欧5800正反算程序

1.主程序(1-ZB ZFS)Deg:Fix 6Lbl 9:”I”:”2.YOU JIN”:”MI MA =”?C: Goto 1↙”Lbl 4:"3.ZH =>BG":”1.ZH =>XY”2.XY =>ZH ":”3.ZH =>BG 4.TF =>JS ”:"N="?N↙If N =3;Then Prog “BG JS 20M”: IfEnd↙If N =4: Then Prog “4-TFJS”; IfEnd↙If N ≥5: Then Cls:Stop; IfEnd↙Lbl 9:”ZH=”?S:Prog “1.1-ZFS”:If N=1:Then Goto3:IfEnd↙If N=2:Then Goto2:IfEnd↙Lbl3:”Z=”?Z:”J=”?J:Abs(S-O)→W:Prog”1.2-ZFS”:X+Zcos(F +J)→X:Y+Zsin(F+J) →Y↙If Z=0(带下划线的0为数字0):Then “X=”:X◢"Y=":Y◢F-90→F:“F WJ=”:F▼DMS◢(5800里面的度分秒的)Prog “123”:“BG =>Z”:D◢Goto4: IfEnd↙If Z=1: Then”(Y)X=”: X◢“(Y)Y=”:Y◢F-90→F:“F WJ=”:F▼DMS◢(5800里面的度分秒的)Prog “123”:“BG =>Z”:D◢Goto4: IfEnd↙If Z=-1: Then”(Z)X=”: X◢“(Z)Y=”:Y◢F-90→F:“F WJ=”:F▼DMS◢(5800里面的度分秒的)Prog “123”:“BG =>Z”:D◢Goto4: IfEnd↙If Z>1: Then”(Y)X=”: X◢“(Y)Y=”:Y◢F-90→F:“F WJ=”:F▼DMS◢(5800里面的度分秒的)Prog “123”:“BG =>Z”:D◢Goto4: IfEnd↙If Z<1: Then”(Z)X=”: X◢“(Z)Y=”:Y◢F-90→F:“F WJ=”:F▼DMS◢(5800里面的度分秒的)Prog “123”:“BG =>Z”:D◢Goto4: IfEnd↙Lbl 2:“(Q)X =”?X:“(Q)Y=” ?Y:X →I:Y →J: Prog"1.3-ZFS":O+W→S:“(SQ)ZH=”:S◢“(SQ)Z=”:Z◢Goto 4↙Lbl 1:If C=1989:Then Goto 4:0→C:Else Stop:IfEnd↙(密码符号段把原来的密码调到后面去了 )2. 正算子程序(1.2-ZFS )0.1739274226→A:0.3260725774→B:0.0694318442→K:0.3300094782→L:1-L→F:1-K→M:U+W(Acos(G+QEKW(C+KWD))+Bcos( G+QELW(C+LWD))+Bcos(G+QEFW(C+FWD))+Acos(G+QEMW(C+MWD))→X:V +W(Asin(G+QEKW(C+KWD))+Bsin(G+QELW(C+LWD))+Bsin(G+QEFW(C+FWD))+Asin(G+QEMW(C+MWD)) →Y:G+QEW(C+WD)+90→F3. 反算子程序(1.3-ZFS)G-90→T:Abs((Y-V)cos(T)-(X-U)sin(T)) →W:0→Z:Lbl 0:Prog "1.2-ZFS":T+QEW(C+WD)→L:(J-Y)cos(L)-(I-X)sin(L)→Z:If Abs(Z)< -6:Then Goto1: Else W+Z→W:Goto 0↙Lb1 1:0→Z:Prog"1.2-ZFS":(J-Y)÷sin (F)→Z↙4. 数据库子程序(1.1-ZFS)If S<***:Then Cls:Stop:IfEnd(全线路的起点里程桩号如:If S<1497534.054:Then Cls:Stop:IfEnd小于1497534.054的全部失败)If S〉*****:Then Cls:Stop:IfEnd↙(同上)If S≦***(线元终点里程):Then***→U(线元起点X):***→V(线元起点Y): ***→O(线元起点里程):***→G(线元起点方位角): ***→H(线元起点至终点长度):***→P(线元起点曲率半径,在这里声明下,如果是直线段的话输1.×10+45就是输1. +45):***→R(线元终点曲率半径同上): 0或1、-1→Q:Goto 1 :IfEnd ↙If S≦……………………………………………:Goto 1 :IfEnd ↙………………[注意:输入方法:ZH-HY(ZH点注意P输入1.×10+45就是输1.+45,HY R按照曲线要素半径),HY-YH(P和R都按照曲线要素输入半径),YH-HZ(YH P按照曲线要素半径,R输1.×10+45),HZ-ZH(P和R 都输1.×10+45) Q为转角值看曲线上是左转角-1还是右转角1HZ-ZH Q为0]最后结尾记得一定要输入Lbl 1:1÷P→C:(P-R)÷(2HPR)→D:180÷π→E:Return↙5.BG JS 20M (子程序)Deg; Fix3↙Lbl1:”ZH=”?:Prog“BG SJK”:”Z=”?Z↙If Z=0:Then A→D:”(0)BG =>Z”:D◢Goto1: IfEnd↙If Z=1:Then A→D:”(Y)BG =>Z”:D◢Goto1: IfEnd↙If Z=-1:Then A→D:”(Z)BG =>Z”:D◢Goto1: IfEnd↙If Z>1:Then A+(Z-1)(C/100)→D:”(Y)BG =>Z”:D◢Goto1: IfEnd↙If Z<-1:Then A+(-Z-1)(-B/100)→D:”(Z)BG =>Z”:D◢Goto1: IfEnd↙6.BG SJK(标高数据库)If S =K: Then H→A:i(Z)→B: i(Y)→C: IfEnd↙注:K 为桩号里程,H为中桩高程,i(Z)为左横坡,i(Y)为右横坡。
卡西欧5800公路坐标正反算程序
卡西欧5800公路坐标正反算程序卡西欧5800公路坐标正反算程序是一种用于测量和计算公路坐标的工具。
它基于卡西欧5800全站仪的技术和功能,能够准确地测量和计算公路的坐标信息。
下面我将详细介绍卡西欧5800公路坐标正反算程序的工作原理和使用方法。
一、工作原理:卡西欧5800全站仪是一种高精度的测量仪器,它能够通过测量角度和距离来确定地点的坐标。
在公路测量中,我们通常会在公路上设置一系列的控制点,然后使用全站仪测量这些控制点的坐标。
通过这些测量数据,我们可以计算出公路上其他点的坐标。
卡西欧5800公路坐标正反算程序基于这些测量数据,通过一系列的计算和算法,能够准确地计算出公路上其他点的坐标。
具体的计算方法包括正算和反算。
正算是指已知控制点的坐标,通过测量数据和算法计算出其他点的坐标。
反算是指已知某个点的坐标,通过测量数据和算法计算出该点在公路上的位置。
二、使用方法:1. 设置控制点:首先,在公路上选择一些具有代表性的控制点,并使用全站仪进行测量。
在测量过程中,需要确保全站仪的水平和垂直仪器准确,以获得准确的测量数据。
2. 导入测量数据:将测量数据导入卡西欧5800公路坐标正反算程序。
该程序通常会提供一个界面,用于导入和管理测量数据。
3. 正算:如果需要计算公路上其他点的坐标,可以选择正算功能。
在正算功能中,需要输入已知控制点的坐标和测量数据。
程序将根据这些数据进行计算,并给出其他点的坐标。
4. 反算:如果需要计算某个点在公路上的位置,可以选择反算功能。
在反算功能中,需要输入已知点的坐标和测量数据。
程序将根据这些数据进行计算,并给出该点在公路上的位置。
5. 结果输出:计算完成后,卡西欧5800公路坐标正反算程序将给出计算结果。
结果通常以表格或图形的形式呈现,以便用户查看和使用。
三、注意事项:1. 测量准确性:为了获得准确的测量结果,使用卡西欧5800全站仪时需要注意测量准确性。
在测量过程中,需要保持仪器的稳定和准确,并避免测量误差。
卡西欧fx-5800 坐标正算程序

卡西欧fx-5800 坐标正算程序“SO”算方位Lbl 0“D”:Pol(X-A,Y-B) →D◢If J≥0:Then J◢Else “J”:J+360◢IfEnd“ZZ”正算直线坐标A+Rec(Abs(P-K),Q) →XB+J→Y“X”:X+Rec(D,Q+N×90) →X◢“Y”:Y+J→Y◢P?所求桩号 A,B:起点x,y K:起点桩号 Q:方位角D:边桩距离 N?左偏“-1”右偏:“+1”X= Y= 所求点坐标“YY”正算圆曲线坐标Q+C×(P-K)÷S×180÷∏→Z“X”:A+C×S×(Sin(Z)-Sin(Q))+Rec(D,Z+N×90) →X◢“Y”:B-C×S×(Cos(Z)-Cos(Q))+J→Y◢P:所求点桩号 A,B:起点x,y K:起点桩号Q:方位角 S:曲线半径 D?边桩距离N?左偏“-1”,右偏“+1”X= y= 所算点坐标 C:线路左转“-1”右转“+1”“H1”正算缓和曲线坐标Abs(P-K) →LT2÷L→HL2×180÷∏÷2÷T2→VQ+C×V→ZL-L∧(3)÷40÷H2+L∧(5)÷3456÷H∧(4)-L∧(7)÷H∧(6)÷599040→EL2÷6÷H- L∧(4)÷336÷H∧(3)+ L∧(6)÷42240÷H∧(5)- L∧(8)÷H∧(7)÷(6×1612800)→FIf C<0:Then-F→F:IfEndA+E×Cos(Q)-F×Sin(Q) →X“X”:X+Rec(D,Z+M×N×90) →X◢B+E×Sin(Q)+F×Cos(Q) →Y“Y”:Y+J◢P?所求点桩号 A,B:起点x,y K:起算点里程桩号Q:前切线方位角 T(是圆曲线要素的A1)=√(根号)缓曲总长×半径C=切线线路方向左转“-1”,右转“+1“M=第一缓曲“+1”,第二缓曲”-1“N:算边桩左偏“-1”,右偏“+1”D:边桩距离坐标正算数据库例子“肇兴隧道右线数据库”Lbl 0“P”?P:“N”?N:“D”?DIf P≥16836.5 And P≤17009.624:Then 66881.803→A:14635.782→B:16836.5→K:280032030.50→Q:902.044→T:1→C: 1→M:Prog“H1”:IfEnd (第一缓曲线)If P≥17009.624 And P≤17529.681:Then 66914.52→A:14465.781→B:17009.624→K:281035049.370→Q:4700→S:Prog“YY”:IfEnd (圆曲线)If P≥17539.681 And 17702.805≥P:Then 67102.343→A:13799.117→B:17702.805→K:108059031.50→Q:902.044→T:-1→C: -1→M:Prog“H1”:IfEnd (第二缓曲线)If P≥17702.805 And P≤19550:Then 67102.343→A:13799.17→B:17702.805→K:288059031.50→Q: Prog“ZZ”:IfEnd (直线)。
卡西欧5800计算器坐标正反算程序

卡西欧5800计算器坐标正反算程序主程序坐标正反算程序名称:ZBZFSLb1 A↙30→Dim Z :"0=ZS,1=FS"?Z ↙If Z=0:Then Goto B:IfEnd↙ (Z=0进入里程点坐标正算)If Z=1:Then Prog"FSLCZ "↙ (Z=1进入反算里程边桩)Lb1 B ↙Prog”ZBZS” ↙子程序反算里程桩名称:FSLCZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的X、Y坐标)“K=”?K ↙(试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)Lb1 2↙Prog"SJK ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos(W)-(X-Z[18])*Sin(W))→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"SJK":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z[18])*Sin (W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else if Q<S: Then K+Q→K:Goto 2 :Else if Q>S :Then K-Q→K:Goto 2:Ifend:Ifend:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)"K=":K+S→K◢(里程)Goto 1↙子程序坐标正算名称:ZBZSLb1 0 ↙“XHS="?G(后视点X):"YHS="?L(后视点Y):"XZJ="?M(置镜点X):"YZJ="?N(置镜点Y):Pol(G-M,L-N):"DH=":I(后视距)◢J<0=>J+360→J:"FH=":JDMS◢(后视方位角)Lb1 1↙“K=”?K :(输入所需计算里程)Prog"SJK "↙XI : Z[18]↙YI: Z[19] ↙Pol(Z[18]-M,Z[19]-N): J<0=>J+360→J↙“PJ=”?P↙ (输入桩与线路夹角)“PD=”?D↙ (输入桩距中线的距离)Z[18]+D*Cos(T+P) →Z[20] ↙Z[19]+D*Sin(T+P) →Z[21] ↙“X=”: Z[20] ◢ (放样坐标X)“Y=”: Z[21] ◢ (放样坐标Y)Pol(Z[20]-M,Z[21]-N):"D=":I◢(放样距)J<0=>J+360→J:"F=":JDMS◢(放样方位角)Goto 1↙子程序数据库名称:SJKif K<本段曲线终点里程And K≥上段曲线终点里程:Then 本段曲线终点里程→Z[1] : 上段曲线终点里程(第一段曲线输起点的里程)→Z[2] :1→O (注:左偏曲线输入-1→O,右偏曲线输入1→O): 半径→R :曲线偏角→A:第一缓和曲线→Z[6] : 第二缓和曲线→Z[7] : 交点X→B :交点Y→C : 小里程向交点方位角→E : 交点向大里程方位角→F : Pr og”JSPB”:Return: Ifend↙if…………Prog”JSPB”:Retur n:Ifend(曲线段分段输入)↙补充直线段输入如下 (只需输线路的最后一段直线数据)if K<本段直线终点里程And K≥本段直线起点里程:Then 本段直线终点里程→Z[3]:终点X→Z[16]:终点Y→Z[17]:方位角→E: Z[16]+ (K- Z [3])*Cos(E)→Z[18]:Z[17]+ (K- Z[3])*Sin(E)→Z[19] : Return:Ifend ↙子程序计算判别名称:JSPBLb1 2 ↙(曲线要素计算)Z[6]/2- Z[6]^3/(240*R^2)+ Z[6]^5/(34560*R^4) →Z[8] ↙ (M1)Z[7]/2- Z[7]^3/(240*R^2)+ Z[7]^5/(34560*R^4) →Z[9] ↙ (M2)Z[6]^2/(24*R)- Z[6]^4/(2688*R^3) →Z[10] ↙ (P1)Z[7]^2/(24*R)- Z[7]^4/(2688*R^3) →Z[11] ↙ (P2)π*A*R/180+0.5*( Z[6]+ Z[7])→Z[25] ↙ (曲线总长)90* Z[6]/(R*π) →Z[14] ↙ (第一缓和曲线总偏角)90* Z[7]/(R*π) →Z[15] ↙(第二缓和曲线总偏角,可以省略)Z[8]+(R+Z[10])Tan(A/2)-(Z[10]-Z[11] )/Sin( A)→Z[12]↙ (切线T1)Z[9]+(R+Z[11])Tan(A/2)+(Z[10]-Z[11] )/Sin (A)→Z[13]↙ (切线T2)B+ Z[12]*Cos (E+180)→ Z[16] ↙ (ZH点X)C+ Z[12]*Sin(E+180)→ Z[17] ↙ (ZH点Y)Z[1]- Z[25]→Z[3] ↙ (ZH点里程)Z[3]+ Z[6]→Z[4] ↙ (HY点里程)Z[1]- Z[7]→Z[5] ↙ (YH点里程)Goto 3 ↙LB1 3 ↙(判断里程点与曲线关系)if K≤Z[3] And K> Z[2] : Then Goto 4 : Ifend ↙if K≤Z[4] And K> Z[3] : Then Goto 5 : Ifend ↙if K≤Z[5] And K> Z[4] : Then Goto 6 : Ifend ↙if K≤Z[1] And K> Z[5] : Then Goto 7 : Ifend ↙Lb1 4 ↙(里程小于直缓点直线独立坐标)K- Z[3] →Z[23] : 0→Z[24] : E→T : Goto 8↙Lb1 5 ↙(第一缓和曲线独立坐标)K- Z[3] →H ↙H-H^5/(40*R^2* Z[6]^2)+H^9/(3456*R^4* Z[6]^4) →Z[23] ↙H^3/(6*R* Z[6])-H^7/(336*R^3* Z[6]^3) →Z[24] ↙90*H^2/( R*π* Z[6]) →T ↙if O>0 :Then T +E→T : Eles E-T →T : T<0=>360+T→T : Ifend ↙Got o 8 ↙Lb1 6 ↙(圆曲线独立坐标)K- Z[4] →H ↙H*180/( R*π)+ Z[14]→T ↙R*Sin(T)+ Z[8]→Z[23] ↙R*(1-Cos(T))+ Z[10]→Z[24] ↙if O>0 :Then T +E→T : Eles E-T →T : T<0=>360+T→T : Ifend ↙Goto 8 ↙Lb1 7 ↙(第二缓和曲线独立坐标)Z[1] -K →H ↙H-H^5/(40*R^2* Z[7]^2)+H^9/(3456*R^4* Z[7]^4) →U↙H^3/(6*R* Z[7])-H^7/(336*R^3* Z[7]^3) →V ↙90*H^2/( R*π* Z[7]) →T ↙Z[13]Cos(A)+ Z[12]-U*Cos(A)-V*Sin(A)→Z[23] ↙Z[13]*Sin(A)-U*Sin(A)+V*Cos(A)→Z[24] ↙if O>0 :Then F-T→T : T<0=>360+T→T : Else F+T →T : Ifend ↙Goto 8 ↙Lb1 8if O<0 : Then - Z[24]→Z[24] : Ifend ↙Z[16]+Z[23]*Cos(E) -Z[24]*Sin(E)→Z[18] ↙Z[17]+Z[23]*Sin(E)+Z[24]*Cos(E)→Z[19] ↙Return↙此程序大约占计算器2900字节!此程序本人已亲自验算,无误!!子程序反算里程桩名称:FSLCZLb1 1↙"XK="?X:"YK="?Y↙(输入任意测点的X、Y坐标)“K=”?K ↙(试算里程,任意输入标段内里程点即可,也可以输入大致的估算里程加快速度)Lb1 2↙Prog"SJK ":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos(W)-(X-Z[18])* Sin(W))→S↙If S<0.0001:Then Goto 4:Else Goto 3:Ifend↙Lb1 3↙K+S→K: Prog"SJK":T-90 →W:W<0=>360+W→W:Abs((Y-Z[19])*Cos W-(X-Z [18])*Si n (W)→Q↙If Q<0.0001 :Then Q→S: Goto 4:Else if Q<S: Then K+Q →K: Goto 2 :Else if Q>S :Then K-Q→K:Goto 2:Ifend:Ifen d:Ifend↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:"DP(-Z+Y)=":I◢(偏距)"K=":K+S→K◢(里程)Goto 1↙Lb1 4↙Pol (X-Z[18],Y-Z[19]:------------差个撒样"DP(-Z+Y)=":I◢(偏距)"K=":K+S→K◢(里程)Goto 1↙。
卡西欧5800公路坐标正反算程序
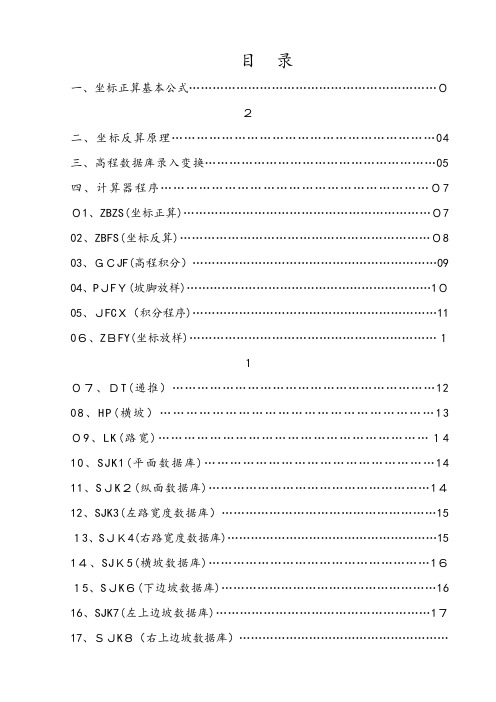
目录一、坐标正算基本公式………………………………………………………02二、坐标反算原理 (04)三、高程数据库录入变换 (05)四、计算器程序………………………………………………………07 01、ZBZS(坐标正算)………………………………………………………0702、ZBFS(坐标反算)………………………………………………………0803、GCJF(高程积分) (09)04、PJFY(坡脚放样)………………………………………………………1005、JFCX(积分程序) (11)06、ZBFY(坐标放样)………………………………………………………1107、DT(递推) (12)08、H P(横坡) (13)09、LK(路宽)………………………………………………………1410、SJK1(平面数据库) (14)11、SJK2(纵面数据库)………………………………………………1412、SJK3(左路宽度数据库) (15)13、SJK4(右路宽度数据库) (15)14、SJK5(横坡数据库)......................................................1615、SJK6(下边坡数据库) (16)16、SJK7(左上边坡数据库)………………………………………………1717、SJK8(右上边坡数据库)………………………………………………18五、后记 (19)CASIO 5800计算器公路工程测量程序一、正算所涉及得计算公式 X R i d XαβBd Y d l d βI图表 错误!不能识别的开关参数。
在图1中,A 点为回旋曲线起点,B 点为回旋曲线止点,I 点为所求坐标点。
设: A点得X 坐标为X A ,Y 坐标为Y A ,A点得切线方位角为α,A 点得曲率为ρA,A 点得里程为LA,B 点得曲率为ρB,B点得里程为L B,I 点得曲率为ρI ,I点得里程为LI 。
卡西欧5800计算器程序坐标正反算(含高程)

卡西欧5800计算器程序坐标正反算(含高程)功能:坐标正反算(含高程),把要素内置化(无需改程序文件,即可更换路线,同时存两条线要素)另含两个边仰(一个横向坡,一个纵向坡)坡放样模块.帮助文件未完成程序浏览:FileName:RESET 初始化程序Norm 1:50→C:12345→J"RESET PW"I:I=J=>500→DimZ 为数据库增加额外变量500个,在SET、SETPFDYS程序根据实际再增减变量50→Z[C+22]"PASSWORDS"I:I→Z[C+39] 重设要素保护密码Cls:StopFileName:DATLOCK 要素保护密码确定认程序Cls:Norm 1:50→C"PASSWORDS"I:Cls:I≠Z[C+39]=>StopFileName:SHELL(外壳程序)50→C ;在扩充变量预留前50个给别的程序用。
如不够就适量加大。
RESET,SHELL,SET,SETPFDYS,这几个程序中C值必需一致Z[C+35]→I:"STATION-N"I:I→Z[C+35] 设置测站N坐标Z[C+36]→I:"STATION-E"I:I→Z[C+36] 设置测站E坐标Z[C+44]→I:"STATION-Z"I:I→Z[C+44] 设置测站Z坐标Z[C+45]→I:"STATION-HI"I:I→Z[C+45] 设置仪高Z[C+41]→I:"GC-DH"I:I→Z[C+41] 放样点高差常数Norm 1Z[C+23]→N 当前分段要素N坐标Z[C+24]→E 当前分段要素E坐标Z[C+25]→M 当前分段要素起点桩号Z[C+26]→H 当前分段要素起点方位角(正北)单位:弧度Z[C+27]→A 当前分段要素起点曲率有左偏负右偏正(注意不半径)Z[C+28]→R 当前分段要素终点曲率有左偏负右偏正(注意不半径)Z[C+29]→L 当前分段要素长度Z[C+3]→WZ[C+32]→I:"DAT1 2 3"I:I→Z[C+32] 平曲线要素数库类型选择1为内置式,2文件式,3实时输入(查看当前要素值)0→IZ[C+4]→I:"1 2 3"I:I→Z[C+4] 选择本程序模式默认为坐标正算,1坐标反算,2横向边仰坡放样,3,纵向边仰坡放样(隧道进出口用到) Lbi 1Z[C+4]→II=1=>Prog"TURNZH"I=2=>Prog"HXBYP"I=3=>Prog"ZXBYP"Lbi ADeg:Norm 1:ClsZ[C+1]→G:"ZH"G:G→Z[C+1] ;G桩求桩号Z[C+2]→B:"JL"B:B→Z[C+2] ;B横向距离,左正右负Lbi BProg "ZBJS" ;坐标正算Prog "GCJS" ;高程计算Fix 3:Cls ;设置三位小数"ZH=":Locate 4,1,G ;第一行显示桩号"X=":Locate 3,2,X ;第二行显示X(N)坐标"Y=":Locate 3,3,Y ;第三行显示Y(E)坐标Prog "GCJS" ;高程计算"Z":Locate 2,4,Z+Z[C+41] ;第四行显示Z坐标Locate 10,4,Z[C+2] ;第四行显示横向距离Do:I+1→I:I=1000=>Goto 1:LpWhile Not(Getkey=57 Or Getkey=27) ;锁定键盘,并在几十秒后自动返回Getkey=57=> Goto 1Z+Z[C+41]+Z[C+49]-Z[C+44]-Z[C+45]→Z[C+48]Pol(Z[C+35]-X,Z[C+36]-Y)Cls:"DL":Locate 3,1,I:Locate 12,1,Z[C+45]"DH":Locate 3,2,Z[C+48]:Locate 12,2,Z[C+49]"FWJ"J<0=J+360→J:J◤DMS◢J→Z[C+46]I→Z[C+47]Goto 1FileName:ZBJS 坐标计算程序Prog"READDAT"RadG-M→QIF AR=0 :Then If A=R :Then 1→J:Else 3→J :IfEnd:Else If A=R :Then 2→J:Else 3→J:IfEnd:IfEndIf J=1 :Then H→F:N+QCos(H)→X:E+QSin(H)→Y:IfEnd 直线段直接计算If J=2 :Then H+QR→F:Rec(Abs(2Sin(Abs)÷R),H+QR÷2):N+I→X:E+J→Y:IfEnd 圆弧段直接计算If J=3 :Then Goto 5 :IfEndX+BCos(F+W)→XY+BSin(F+W)→YDeg:ReturnLbi 5 用五点通用坐标计算计算缓和段(R-A)÷L→KKQ2→J→P:H+IP+JP2→U→P:H+IP+JP2→V→P :H+IP+JP2→D→P:H+IP+JP2→F→P:H+IP+JP2→T→I→J→ON+Q(ICos(U)+JCos(V)+OCos(D)+JCos(F)+ICos(T))→XE+Q(ISin(U)+JSin(V)+OSin(D)+JSin(F)+ISi n(T))→YH+AQ+KQ2→FX+BCos(F+W)→XY+BSin(F+W)→YDeg:ReturnFileName:TURNZH(坐标反算)Norm 1Z[C+37]→I:"DQD-N"I:I→Z[C+37] 输入待求点N坐标I=-1=>Prog"INFWJDLDH"Z[C+38]→I:"DQD-E"I:I→Z[C+38] 输入待求点E坐标0→B:M+L÷2→G:Prog"ZBJS"Lbi S:RadZ[C+37]-X→I:Z[C+38]-Y→JIf I=0 And J=0 :Then Goto A:IfEndPol(I,J)Lbi A:Rec(I,J-F):J→Z[C+2]G+I→G:IF Abs(I)> :Then Prog"ZBJS":Goto S↙G→Z[C+1]FileName:INFWJDLDH 实测坐标(用方位角,距离,高差)输入程序Deg:Norm 1:ClsZ[C+46]→J:"DQD-FWJ"J:J→Z[C+46]Z[C+47]→I:"DQD-DL"I:I→Z[C+47]Z[C+48]→K:"DQD-DZ"K:K→Z[C+48]Z[C+49]→P:"RHT"P:P→Z[C+49]Rec(I,J)Z[C+35]+I→Z[C+37]Z[C+36]+J→Z[C+38]Z[C+44]+Z[C+45]+K-P→Z[C+43]FileName:HXBYP 横向边仰坡放样程序Cls:Norm 1Z[C+40]→I:"QPD-DL"I:I→Z[C+40] 输入起坡点与中桩距离常数Z[C+41]→I:"QPD-DZ"I:I→Z[C+41] 输入起坡点与中桩高差常数Z[C+42]→I:"i"I:I→Z[C+42] 输入边仰坡坡度,左仰坡(路堑)为正,右仰坡(路堑)为负,左边坡为负,右边坡为正Cls:Z[C+43]→I:"DQD-Z"I:I→Z[C+43] 输入实测高程Prog"TURNZH"Prog "GCJS"(Z[C+43]-Z-Z[C+41])Z[C+42]+Z[C+40]→BFix 3:B-Z[C+2]◢显示与上一次测点的偏差B→Z[C+2]FileName:ZXBYP 纵向仰坡放样程序(隧道进口使用)Cls:Norm 1:Z[C+33]→I:"QPD-ZH"I:I→Z[C+33] 输入起坡点桩号Z[C+34]→I:"QPD-Z"I:I→Z[C+34] 输入起坡点高程Z[C+42]→I:"i"I:I→Z[C+42] 仰坡时(隧道进出口仰坡),进口为正,出口为负)Cls:Z[C+43]→I:"DQD-Z"I:I→Z[C+43] 输入实测高程Prog"TURNZH"Z[C+42](Z[C+43]-Z[C+34])+Z[C+33]→GFix 3:G-Z[C+1]◢显示与上一次测点的偏差G→Z[C+1]FileName:SET 设置程序Lbi SNorm 150→C50→Z[C+22]0→KZ[C+5]→I:"1 Or 2"I:I→Z[C+5] ;选择1线或者2线180Z[C+3]÷π→J:"XZJJ"J:Jπ÷180→Z[C+3] ;斜桩夹角If I=1:Then Z[C+8]→Z[C+6]:Z[C+9]→Z[C+7]Z[C+12]→Z[C+16]:Z[C+13]→Z[C+17]:Z[C+18]→Z[C+20]Else Z[C+10]→Z[C+6]:Z[C+11]→Z[C+7]Z[C+14]→Z[C+16]:Z[C+15]→Z[C+17]::Z[C+19]→Z[C+20]Z[C+7]+3→Z[C+31]0→I:"1PQX,2SQX,3YSDS"I ;1输入平曲线要素,2输入竖曲线要素,3输入1、2线夹平竖曲线交点(变坡点)数量以让程序规划内存建立要素数据为,其它值退出本程序I=1 => Goto 1:I=2 => Goto 2:I=3 => Goto 3I≠0=>Prog"DATLOCK"Prog"SETPFDYS"StopLbi 1 ;平曲线要素输入部分Z[C+6]→D-1→Z[D+3]For 1→J T o Z[C+16]Cls:"PQX":Locate 9,1,JZ[D+1]→I:"N"I:I→Z[D+1] ;请输入N坐标Z[D+2]→I:"E"I:I→Z[D+2] ;请输入E坐标Z[D+3]→I:"R"I:I→Z[D+3] ;请输入半径RZ[D+4]→I:"LS1"I:I→Z[D+4] ;请输入缓和曲线1长度Z[D+5]→I:"LS2"I:I→Z[D+5] ;请输入缓和曲线2长度Next1→Z[D-2]Goto SLbi 2 ;竖曲线要素输入部分Z[C+7]→D-1→Z[D+3]For 1→J T o Z[C+17]Cls:"SQX":Locate 9,1,JZ[D+1]→I:"BPDZH"I:I→Z[C+1] ;请输入变坡点桩号Z[D+2]→I:"BPDGC"I:I→Z[C+2] ;请输入变坡点高程Z[D+3]→I:"R"I:I→Z[C+3] ;请输入半径RD+3→DNext1→Z[D]Goto SLbi 3 ;要素点数输入部分Z[C+12]→I:"1PQXDS"I:I→Z[C+12] ;输入1线平曲线点数,最小值为3Z[C+13]→I:"1SQXDS"I:I→Z[C+13] ;输入1线竖曲线点数,最小值为3Z[C+18]→I:"1JDZH"I:I→Z[C+18] ;输入1线平曲线第一个交点的交点桩号Z[C+14]→I:"2PQXDS"I:I→Z[C+14] ;输入2线平曲线点数,最小值为3Z[C+15]→I:"2SQXDS"I:I→Z[C+15] ;输入2线竖曲线点数,最小值为3Z[C+19]→I:"2JDZH"I:I→Z[C+19] ;输入2线平曲线第一个交点的交点桩号C+Z[C+22]→Z[C+8] 1线路平曲线要素指针偏移基数Z[C+8]+5Z[C+12]→Z[C+9] 1线路竖曲线要素指针偏移基数Z[C+9]+3Z[C+13]→Z[C+10] 2线路平曲线要素指针偏移基数Z[C+10]+5Z[C+14]→Z[C+11] 2线路竖曲线要素指针偏移基数Z[C+11]+3Z[C+15]→Z[C+21] 要素数据库结束指针Z[C+21]+1→Z[C+30]Z[C+21]→DimZ 增加额外变量-1→KGoto SFileName:SETPFDYS 交点要素=>分段要素Norm 150→CRadZ[C+6]+5→DZ[C+21]+1→FF+6→DimZ-1→Z[F] ; 设置分段要素开始标志Z[C+20]→V ; 从数据库读入当前线第一个平曲线交点桩号0→GPol(Z[D+1]-Z[D-4],Z[D+2]-Z[D-3]) ;计算第一条直线的距离I,计算方位角JJ→HZ[D-4]→Z[F+1] 直线段Z[D-3]→Z[F+2]V-I→Z[F+3]For 1→G T o Z[C+16]-2Pol(Z[D+1]-Z[D-4],Z[D+2]-Z[D-3]) ;计算第本交点与下一交点的距离I,计算方位角JI→W:J→HPol(Z[D+6]-Z[D+1],Z[D+7]-Z[D+2])J-H→K ;计算转角K,负值是左转角,正值是右转角IF Abs(K)>π:Then If K>0:Then K-2π→K:Else K+2π→K:IfEnd:IfEndZ[D+3]→R ;从数据库读入半径RZ[D+4]→L ;从数据库读入缓和曲线1长度Z[D+5]→M ;从数据库读入缓和曲线2长度L÷2÷R→B ;计算缓和曲线1的B0角M÷2÷R→O ;计算缓和曲线2的B0角(Abs(K)-B-O)R→P ;计算圆曲线长度L2÷24÷R-L^(4) ÷2384÷R^(3) →Q ;内移值计算方法2L÷2-L^(3) ÷240÷R2→S ;切线增长值计算方法2M2÷24÷R-M^(4) ÷2384÷R^(3) →J ;内移值计算方法2M÷2-M^(3) ÷240÷R2→I ;切线增长值计算方法2Abs(π÷2- Abs(K)) →ARtan(Abs(K÷2))+S+J÷Cos(A)-QTan(A)→T ;计算切线1Rtan(Abs(K÷2))+I+Q÷Cos(A)-JTan(A)→U ;计算切线2H<0=>H+2π→HK<0 =>-1→AH→Z[F+4]0→Z[F+5]0→Z[F+6]F+6→FF+6→DimZRec(T,H) 缓和段1 Z[D+1]-I→NZ[D+2]-J→EN→Z[F+1]E→Z[F+2]V-T→Z[F+3]L=0=>Goto AH→Z[F+4]0→Z[F+5]A÷R→Z[F+6]F+6→DimZLbi A 圆弧段0→I:0→JL=0=>Goto BPol(L-L^(3)÷40÷R2,L2÷6÷R-L^(4)÷336÷R^(4)) Lbi B Rec(I,H+AJ)N+I→NE+J→EN→Z[F+1]E→Z[F+2]V-T+L→Z[F+3]H+AB→Z[F+4]A÷R→Z[F+5]A÷R→Z[F+6]F+6→FF+6→DimZM=0=>Goto C 缓和段2 Rec(2RSin÷R),H+AB+AP÷R÷2) N+I→NE+J→EN→Z[F+1]E→Z[F+2]V-T+L+P→Z[F+3]H+AB+AP÷R→Z[F+4]A÷R→Z[F+5]0→Z[F+6]Lbi CF+6→FF+6→DimZRec(U,H+K)Z[D+1]+J→Z[F+1]Z[D+2]+I→Z[F+2]V-T+L+P+M→Z[F+3]V-T+L+P+M-U+I→VD+5→DNextH+K→Z[F+4]0→Z[F+5]0→Z[F+6]F+9→DimZ1→Z[F+7]V→Z[F+9] 要素终点桩号DegFileName:READDATZ[C+32]→II=3=>Prog"READDAT3"If GM+L :Then ;验证要素是否可用,否则重设要素I=1=>Prog"READDAT1"I=2=>Prog"READDAT2"Prog"REALDAT3"IfEndFileName:READDAT1 平曲线分段要素读取程序1Z[C+30]→F0→JLbi 1 搜索要素If G<z[f+3]:then< p="">-1=Z[F]=>Goto E:F-6→F:-1→J:Goto 1Else 1=Z[F+1]=>Goto E:-1=J=>Goto 2:1→J:F+6→F:Goto 1 IfEndLbi 2F→Z[C+30]Z[F+1]→Z[C+23] 当前分段要素N坐标Z[F+2]→Z[C+24] 当前分段要素E坐标Z[F+3]→Z[C+25] 当前分段要素起点桩号Z[F+4]→[C+26] 当前分段要素起点方位角(正北)Z[F+5]→Z[C+27] 当前分段要素起点曲率有左偏负右偏正(注意不半径)Z[F+6]→Z[C+28] 当前分段要素终点曲率有左偏负右偏正(注意不半径)</z[f+3]:then<>。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
卡西欧5800公路坐标正反算程序
卡西欧5800公路坐标正反算程序是一种用于测量和计算公路坐标的工具,可以帮助测量员准确地确定公路上的位置和坐标。
本文将详细介绍卡西欧5800公路坐标正反算程序的功能、使用方法以及相关注意事项。
一、功能介绍
卡西欧5800公路坐标正反算程序具有以下主要功能:
1. 坐标正算:根据已知的起点坐标、方位角和距离,计算出目标点的坐标。
2. 坐标反算:根据已知的起点坐标和目标点坐标,计算出方位角和距离。
3. 坐标转换:支持不同坐标系之间的转换,如高斯投影坐标系、经纬度坐标系等。
4. 坐标纠正:根据已知的控制点坐标和实测点坐标,进行坐标纠正和校正。
二、使用方法
1. 坐标正算:
步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:输入起点坐标(经度、纬度)、方位角和距离。
步骤3:点击计算按钮,程序将自动计算并显示目标点的坐标。
2. 坐标反算:
步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:输入起点坐标(经度、纬度)和目标点坐标(经度、纬度)。
步骤3:点击计算按钮,程序将自动计算并显示方位角和距离。
3. 坐标转换:
步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:选择需要转换的坐标系类型。
步骤3:输入待转换的坐标信息。
步骤4:点击转换按钮,程序将自动进行坐标转换并显示结果。
4. 坐标纠正:
步骤1:进入卡西欧5800公路坐标正反算程序。
步骤2:输入已知的控制点坐标和实测点坐标。
步骤3:点击纠正按钮,程序将自动进行坐标纠正和校正,并显示结果。
三、注意事项
1. 在使用卡西欧5800公路坐标正反算程序之前,确保已正确安装和配置软件,并且设备连接正常。
2. 在进行坐标计算和转换时,输入的坐标信息应准确无误,以确保计算结果的
准确性。
3. 在进行坐标纠正时,应选择合适的控制点和实测点,并确保其坐标信息准确
无误。
4. 在使用过程中,如遇到问题或需要进一步了解功能细节,可以参考使用手册
或联系卡西欧客服进行咨询。
总结:
卡西欧5800公路坐标正反算程序是一款功能强大的工具,可用于测量和计算
公路坐标。
通过坐标正算、坐标反算、坐标转换和坐标纠正等功能,可以帮助测量
员准确地确定公路上的位置和坐标。
在使用过程中,需要注意输入的坐标信息的准确性,并且确保设备连接正常。
如有问题,可参考使用手册或联系卡西欧客服进行咨询。