积分分离法调节器直流调速系统研究
实验1:不可逆单闭环直流调速系统静特性的研究(B5参考格式)
《运动控制系统》实验报告姓名: 专业班级: 学号: 同组人:实验一 不可逆单闭环直流调速系统静特性的研究一、实验目的1、了解转速单闭环直流调速系统的组成。
2、加深理解转速负反馈在系统中的作用。
3、研究直流调速系统中速度调节器ASR 的工作原理及其对系统静特性的影响。
4、测定晶闸管--电动机调速系统的机械特性和转速单闭环调速系统的静特性。
二、实验系统组成及工作原理采用闭环调速系统,可以提高系统的动静态性能指标。
转速单闭环直流调速系统是常用的一种形式。
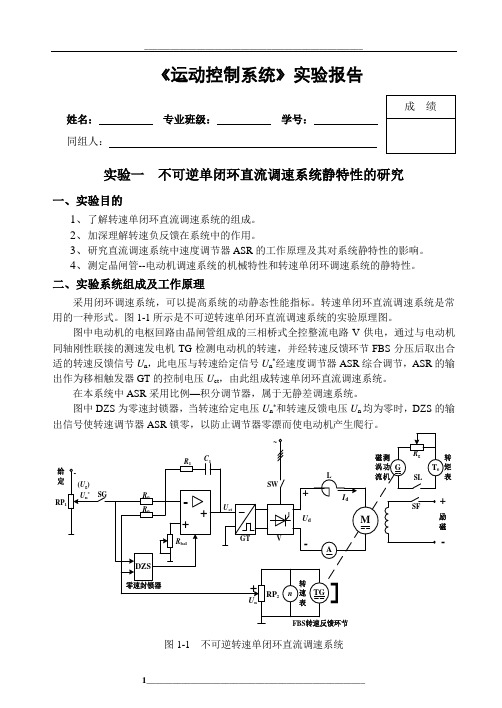
图1-1所示是不可逆转速单闭环直流调速系统的实验原理图。
图中电动机的电枢回路由晶闸管组成的三相桥式全控整流电路V 供电,通过与电动机同轴刚性联接的测速发电机TG 检测电动机的转速,并经转速反馈环节FBS 分压后取出合适的转速反馈信号U n ,此电压与转速给定信号U n *经速度调节器ASR 综合调节,ASR 的输出作为移相触发器GT 的控制电压U ct ,由此组成转速单闭环直流调速系统。
在本系统中ASR 采用比例—积分调节器,属于无静差调速系统。
图中DZS 为零速封锁器,当转速给定电压U n *和转速反馈电压U n 均为零时,DZS 的输出信号使转速调节器ASR 锁零,以防止调节器零漂而使电动机产生爬行。
RP 给定图1-1 不可逆转速单闭环直流调速系统三、实验注意事项1. 直流电动机M03参数为:P N=185W,U N=220V,I N=1.1A,n=1500r/min。
2. 直流电动机工作前,必须先加上直流激励。
3. 系统开环以及单闭环起动时,必须空载,且不允许突加给定信号U g起动电机,每次起动时必须慢慢增加给定,以免产生过大的冲击电流,更不允许通过突合主回路电源开关SW起动电机。
4. 测定系统开环机械特性和闭环静特性时,须注意电枢电流不能超过电机额定值1A。
5. 单闭环连接时,一定要注意给定和反馈电压极性。
四、实验内容1、晶闸管--电动机系统开环机械特性及控制特性的测定(1)连接晶闸管—电动机系统为开环控制,不必使用转速调节器ASR,可将给定电压U g(开环时给定电压称为U g,闭环后给定电压称为U n*)直接接到触发单元GT的输入端(U ct),电动机和测功机分别加额定励磁。
积分分离PID算法在直流电机中的研究应用

图 3 系统软件流程图 4 积分分离 PID 算法程序实现
DOI:10.16667/j.issn.2095-1302.2016.02.020
智能处理与应用
Intelligent Processing and Application
积分分离PID算法在直流电机中的研究应用
赵 坤,张 伟
(湖北大学 计信学院,湖北 武汉 430062)
摘 要:直流电机在工业控制领域被广泛应用,为了提高直流电机的转速控制精度,通常采用数字式积分分离PID算法
=
Kp
cerr^
t
h
+
1 T1
err^ t
hdt
+
TD derr^ t dt
h
m
(1)
其中,给定值 in(t)为系统预定的电机转速(转 /min);
被控变量 out(t)为系统实际的电机转速(转 /min);
偏差为 err(t)=in(t)- out(t)。
执行器在本系统中为直流电机,传感器为编码盘。为了
———————————————— 收稿日期:2015-11-15
时系统也能够很快达到稳定。图 1 所示为 PID 控制流程图。
给定值 in( )
偏差 err( )
比例环节 积分环节 微分环节
()
执行器
被控变量
out( )
传感器
图 1 模拟 PID 控制系统原理框图
PID 的控制规律为 :
# u^
t
h
红外传 感器
A/D 设定转速 转换
PID 调节器
PWM波 输出
光电 隔离
L298电机 驱动电路
编码盘
电机
图 2 系统基本原理框图 3 系统软件设计
推荐-直流电机的比例积分微分控制研究 精品
直流电机的比例积分微分控制研究目录引言PID控制是最早发展起来的应用经典控制理论的控制策略之一,由于算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程并取得了良好的控制效果。
随着工业的发展,对象的复杂程度不断加深,尤其对于大滞后、时变的、非线性的复杂系统,常规PID 控制显得无能为力。
因此常规PID 控制的应用受到很大的限制和挑战.。
神经网络在控制系统中的应用提高了整个系统的信息系统处理能力和适应能力,提高了系统的智能水平。
此外,神经网络具有逼近任意连续有界非线性函数的能力,对于非线性系统和不确定性系统,无疑是一种解决问题的有效途径。
本文将常规PID 控制与神经网络控制相结合,发挥各自的优势,形成所谓的智能PID 控制。
采用BP 神经网络方法设计的控制系统具有更快的速度(实时性)、更强的适应性和更好的鲁棒性。
第一章PID控制的分类及应用1.1 数字PID 控制PID 控制原理在模拟控制系统中,控制器最常用的控制规律是PID 控制。
PID 的控制规律为:(1)式中,KP—比例系数;TI—积分时间常数;TD—微分时间常数。
1.2 增量式PID 控制计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。
因此,连续PID 控制算法不能直接使用,需要采用离散化方法。
当采样周期T 较小时,可得到离散PID 表达式:(2)式中,u(k)为控制器在k 时刻的输出,ki=kp/TI , kd=kpTD , T 为采样周期,k 为采样序号,k=1,2,.,e(k- 1)和e(k)分别为第(k- 1)和第k 时刻所得的偏差信号。
当执行机构需要的是控制量的增量时,采用增量式PID 控制。
利用⑵式,用u(k)- u(k- 1),并进行一些变换,可得到增量式PID 控制算法:1.3 基于BP 神经网络的PID 控制PID 控制要取得较好的控制效果,必须通过调整好比例、积分和微分三种控制作用,形成控制量中既要相互配合又相互制约的关系。
数字PID调节器算法的研究实验报告
实验四数字PID 调节器算法的研究一、实验目的1.学习并熟悉常规的数字PID 控制算法的原理;2.学习并熟悉积分分离PID 控制算法的原理;3.掌握具有数字PID 调节器控制系统的实验和调节器参数的整定方法。
二、实验设备1.THTJ-1 型计算机控制技术实验箱2.THVLW-1 型USB 数据采集卡一块(含37 芯通信线、USB 电缆线各1 根)3.PC 机1 台(含上位机软件“THTJ-1”)三、实验内容1.利用本实验平台,设计并构成一个用于混合仿真实验的计算机闭环实时控制系统;2.采用常规的PI 和PID 调节器,构成计算机闭环系统,并对调节器的参数进行整定,使之具有满意的动态性能;3.对系统采用积分分离PID 控制,并整定调节器的参数。
四、实验原理在工业过程控制中,应用最广泛的控制器是 PID 控制器,它是按偏差的比例(P)、积分(I)、微分(D)组合而成的控制规律。
而数字PID 控制器则是由模拟PID 控制规律直接变换所得。
在 PID 控制规律中,引入积分的目的是为了消除静差,提高控制精度,但系统中引入了积分,往往使之产生过大的超调量,这对某些生产过程是不允许的。
因此在工业生产中常用改进的PID 算法,如积分分离PID 算法,其思想是当被控量与设定值偏差较大时取消积分控制;当控制量接近给定值时才将积分作用投入,以消除静差,提高控制精度。
这样,既保持了积分的作用,又减小了超调量。
五、实验步骤1、实验接线1.1 按图4-1 和图4-2 连接一个二阶被控对象闭环控制系统的电路;1.2 该电路的输出与数据采集卡的输入端AD1 相连,电路的输入与数据采集卡的输出端DA1 相连;1.3 待检查电路接线无误后,打开实验平台的电源总开关,并将锁零单元的锁零按钮处于“不锁零”状态。
2、脚本程序运行2.1 启动计算机,在桌面双击图标THTJ-1,运行实验软件;2.2 顺序点击虚拟示波器界面上的“开始采集”按钮和工具栏上的脚本编程器按钮;2.3 在脚本编辑器窗口的文件菜单下点击“打开”按钮,并在“计算机控制算法VBS\ 计算机控制技术基础算法\数字PID 调器算法”文件夹下选中“位置式PID”脚本程序并打开,阅读、理解该程序,然后点击脚本编辑器窗口的调试菜单下“步长设置”,将脚本算法的运行步长设为100ms;2.4 点击脚本编辑器窗口的调试菜单下“启动”;用虚拟示波器观察图4-2 输出端的响应曲线;2.5 点击脚本编辑器的调试菜单下“停止”,利用扩充响应曲线法(参考本实验附录4)整定PID控制器的P、I、D及系统采样时间Ts等参数,然后再运行。
工业平缝机电机调速系统设计研究
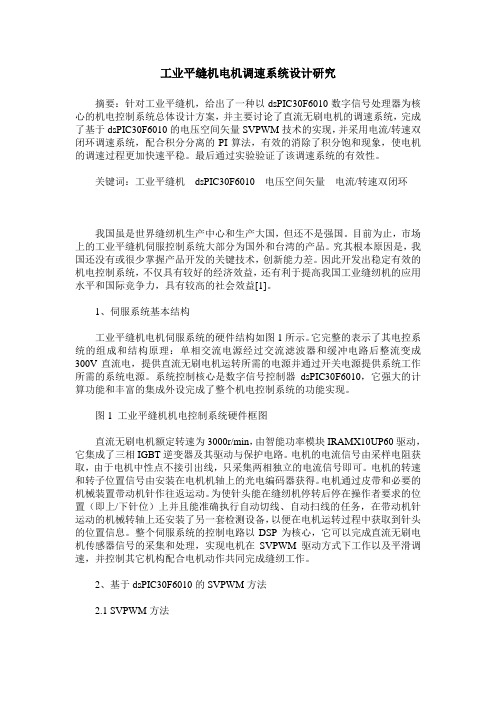
工业平缝机电机调速系统设计研究摘要:针对工业平缝机,给出了一种以dsPIC30F6010数字信号处理器为核心的机电控制系统总体设计方案,并主要讨论了直流无刷电机的调速系统,完成了基于dsPIC30F6010的电压空间矢量SVPWM技术的实现,并采用电流/转速双闭环调速系统,配合积分分离的PI算法,有效的消除了积分饱和现象,使电机的调速过程更加快速平稳。
最后通过实验验证了该调速系统的有效性。
关键词:工业平缝机dsPIC30F6010 电压空间矢量电流/转速双闭环我国虽是世界缝纫机生产中心和生产大国,但还不是强国。
目前为止,市场上的工业平缝机伺服控制系统大部分为国外和台湾的产品。
究其根本原因是,我国还没有或很少掌握产品开发的关键技术,创新能力差。
因此开发出稳定有效的机电控制系统,不仅具有较好的经济效益,还有利于提高我国工业缝纫机的应用水平和国际竞争力,具有较高的社会效益[1]。
1、伺服系统基本结构工业平缝机电机伺服系统的硬件结构如图1所示。
它完整的表示了其电控系统的组成和结构原理:单相交流电源经过交流滤波器和缓冲电路后整流变成300V直流电,提供直流无刷电机运转所需的电源并通过开关电源提供系统工作所需的系统电源。
系统控制核心是数字信号控制器dsPIC30F6010,它强大的计算功能和丰富的集成外设完成了整个机电控制系统的功能实现。
图1 工业平缝机机电控制系统硬件框图直流无刷电机额定转速为3000r/min,由智能功率模块IRAMX10UP60驱动,它集成了三相IGBT逆变器及其驱动与保护电路。
电机的电流信号由采样电阻获取,由于电机中性点不接引出线,只采集两相独立的电流信号即可。
电机的转速和转子位置信号由安装在电机机轴上的光电编码器获得。
电机通过皮带和必要的机械装置带动机针作往返运动。
为使针头能在缝纫机停转后停在操作者要求的位置(即上/下针位)上并且能准确执行自动切线、自动扫线的任务,在带动机针运动的机械转轴上还安装了另一套检测设备,以便在电机运转过程中获取到针头的位置信息。
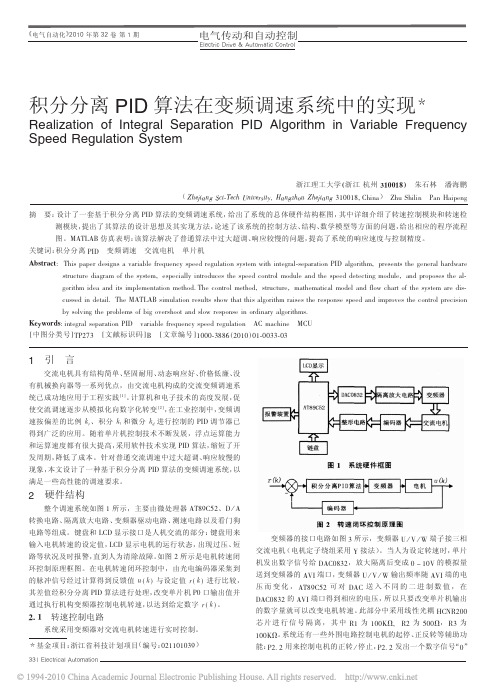
积分分离PID算法在变频调速系统中的实现
-5 送 出 二 进 制 数 调 整电机转速。
#" $
积分分离
在实现对速度、
%&’ 算法思想
温度、压强等物理量 的控制中, -<+ 是一 种较成熟的算法 B & C 。 在普通的 -<+ 控制中 引入积分环节的目 的,主要是为了消除 静差,提高控制精 度。积分分离控制思 想是:当控制量与设 定值接 近设 定值 时, 取消积分作用;当被 控量接近设定值时, 引入积分作用 B " C 。 控制实现步骤为: (’ ) 根据实际情况, 人为设定阀值 !D 5 ; (. ) 采用 -+ 控制; 当 E !F "GD ! E , (& ) 当 E !F "G& ! # , 采用 -<+ 控制。 积分分离控制算法可表示为
采用分段积分 在实际编程中, 可以对积分分离 -<+ 进行改进,
#" !
积分分离 %&’ 算法实现
普通的 -<+ 控制算法中,由于积分系数 ") 是常数,在整个控
!
系统软件设计
控制规律的实现是由计算机软件完成的。 软件设计基于 789:$%’ 编写的, 采用模块化结构设计, 各个功
制过程中, 积分增量不变。而变频调速系统是一个多变量、 强耦合 的非线性系统
>
引
言
交流电机具有结构简单、 坚固耐用、 动态响应好、 价格低廉、 没 有机械换向器等一系列优点,由交流电机构成的交流变频调速系 计算机和电子技术的高度发展, 促 统已成功地应用于工程实践 L " M 。 在工业控制中, 变频调 使交流调速逐步从模拟化向数字化转变 L N M , 速按偏差的比例 8 9、积分 8% 和微分 8: 进行控制的 /45 调节器已 得到广泛的应用。随着单片机控制技术不断发展,浮点运算能力 和运算速度都有很大提高, 采用软件技术实现 /45 算法, 缩短了开 发周期, 降低了成本。针对普通交流调速中过大超调、 响应较慢的 以 现象, 本文设计了一种基于积分分离 /45 算法的变频调速系统, 满足一些高性能的调速要求。
基于单片机的无刷直流电动机脉宽调速系统_孙艳霞
图 5 PI 调节算 法 Fig 5 PI adjustment algorithm
PI 调节器的脉冲3; K I
1 S
式中: K p KI T
Kp+
KI 2
T
Z+ 1 Z- 1
( 1)
孙艳霞
( 大连交通大学 电气信息学院, 辽宁 大连 116028)
摘 要: 针对以往无刷直流电动机多由单片机附 加许多种接 口设备构 成, 难于 实现从位 置环到 速
度、电流环的全数字控制问题, 设计 了采用 SP CE061A 型 16 位单片 机的 脉宽调 速系 统. 该单片 机
主要完成 位置传感器信号的采集、电动机 换相信 号的输 出、电 动机转 速的测 量以及 数字 PWM 调
无刷直流电动机的单片机脉宽调速是伴随着 数字控制技术发展起来的. 系统采用台湾凌阳公 司推出的 16 位单片机 SPCE061A 对其进行有效 控制.
无刷直流电动机的换相原理如图 2 所示, 定 子端盖内对称装有 3 个霍尔集成片作为转子传感 器, 随着转子永磁体的转动, 作用于位置传感器的 磁场方向 N- S 极交替变换, 使位置传感器产生相 差 120 的 H 1、H 2、H 3 方波, 有效的 6 个转态编码 信号: 101、100、110、010、011、001, 每一瞬间 有 2 个功率管导通, 每个功率管连续导通 120 电角度, 每隔 60 电角度定子绕组电流换相一次, 编码信号 发生变化的时刻也是定子绕组电流将要发生换相 的时刻.
本系统采用的是三相星型联结, 驱动主回路采 用二二导通方式, 共有 6 种导通状态, 转子每转过 60 电角度变换一种状态. 导通状态的转换通过软 件来完成, 即根据位置传感器的输出信号 H 1、H 2、 H 3, 不断地取相应的控制字送 IOB 口来实现.
基于积分分离PID调节方法的直流发电机控制系统优化设计
基于积分分离PID调节方法的直流发电机控制系统优化设计郭小程1常宜2路德杨3(1. 海军92557部队,广州 510720;2. 海军92571部队,海南三亚 5720213. 西安交通大学能源与动力工程学院,西安 710049)摘要:现有的消磁用直流脉冲发电机控制系统采用双反馈控制方式,在此基础上对控制系统的模型进行了PID调节仿真,并针对消磁工作电流波形的特点提出了采用积分分离PID调节方法。
仿真结果表明该调节方法对电流波形的控制效果最优。
关键词:直流发电机控制系统仿真 PID调节中图分类号:TM743 文献标识码:A 文章编号:1003-4862 (2009) 07-0041-04Optimization Design of DC Dynamo Control System Based onIntegral Separation PID AdjustmentGuo Xiaocheng1, Chang Yi 2, Lu Deyang 3(1. Navy 92557 Group, Guangzhou 510720, China; 2. Navy 92571 Group, Sanya 572021, Hannan, China;3. School of Energy and Power Engineering, Xi’an Jiaotong University, Xi’an 710049, China)Abstract: The DC pulse dynamo control system used for degaussing adopts the control mode of double-feedback. PID adjust emulation is progressed on this control system, in addition the way of integral separation PID adjustment is advanced aiming at the characteristic of working current wave of degaussing. The emulational results show that this adjust method’s controlling effect of the current wave is optimal.Key words: DC dynamo; control system; simulation; PID adjustment1 引言在某船舶应用领域中,电源系统要向负载提供脉冲工作电流,即按照控制器输出的信号向负载提供正负交替,振幅逐渐衰减的脉冲电流[1](见图1)。
一种基于分数阶PID直流电机调速的AGV控制系统
一种基于分数阶PID直流电机调速的AGV控制系统吕毅;戚志东【期刊名称】《现代电子技术》【年(卷),期】2017(040)003【摘要】In order to design a low?cost,anti?interference,stable and reliable AGV,an AGV system based on magnetic navigation is proposed. The singlechip 80C51 made by Megawin Company is taken as the control core of the system. The Hall sen?sor with symmetrical design is used to realize the tracking and deviation rectification. The infrared photoelectric sensor is adopted to avoid the obstacles. The host computer is employed to monitor the system. In order to realize the stability and real?time perfor?mance of the AGV motor speed control,the fractional order PID algorithm is used to control the speed. The controller was modeled and simulated with Matlab software to verify its feasibility. The AGV has the advantages of strong anti?interference ability, high precision of obstacle avoidance,stable and safe operation,which were verified by the actual application.%为设计一种低成本、抗干扰、稳定可靠的AGV,提出一种基于磁带导航的AGV系统。
6 比例积分控制的直流调速系统.
PI控制综合了比例控制和积分控制两种规 律的优点,又克服了各自的缺点。 比例部分能迅速响应控制作用, 积分部分则最终消除稳态偏差。
11
2.3.4 直流调速系统的稳态误差分析
图2-31 比例积分控制的直流调速系统的动态结构框图 (转速调节器用ASR表示)
12
三者开环函数
使用比例调节器时,系统的开环传递函数为
在比例控制直流V-M调速系统中,调节器 的输出是电力电子变换器的控制电压
U c K p U n
只要电机在运行就必须有控制电压,因而 也必须有转速偏差电压,这是此类调速系 统有静差的根本原因。
3
1.积分调节器和积分控制规律
在输入转速误差信号ΔUn的作用下,积分调 节器的输入输出关系为 1 t U c U n dt (2-53) 0 其传递函数是
1 WI ( s ) s
(2-54)
4
其中,τ——积分时间常数。
输入ΔUN是阶跃 信号,则输出Uc 按 线性规律增长。 输出按线性规律 增长,当达到积分 调节器输出的饱和 值Ucm时,便维持在 Ucm不变。
图2-26 积分调节器的输入和输出动态过程
5
只要ΔUn>0,积分调 节器的输出Uc便一直 增长;只有达到 ΔUn=0时, Uc才停止 上升;只有到ΔUn变 负, Uc才会下降。
* Un U n lim s U n ( s) lim s s 1 s 0 s 0
的稳态误差是
1 0 K s(Ts s 1)(TmTl s 2 Tm s 1)
电力拖动自动控制系统 —运动控制系统
第2章
转速反馈控制的直流调速系统