矩子JutzeAOI程式误报调试
赛元MCU常见应用问题解决方案
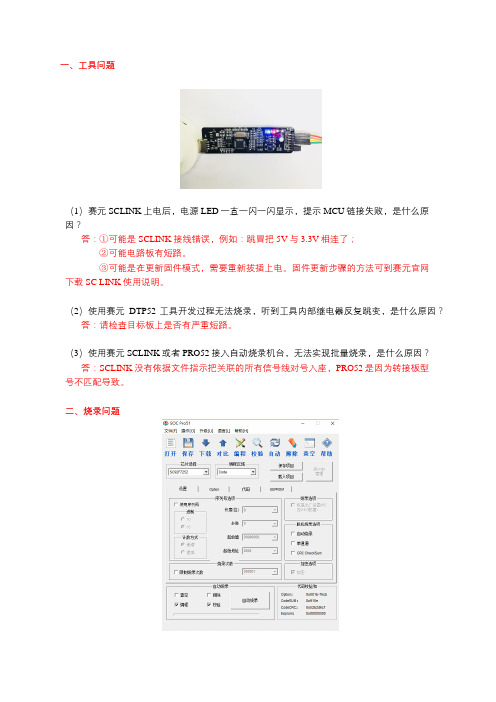
一、工具问题(1)赛元SCLINK上电后,电源LED一直一闪一闪显示,提示MCU链接失败,是什么原因?答:①可能是SCLINK接线错误,例如:跳冒把5V与3.3V相连了;②可能电路板有短路。
③可能是在更新固件模式,需要重新拔插上电。
固件更新步骤的方法可到赛元官网下载SC LINK使用说明。
(2)使用赛元DTP52工具开发过程无法烧录,听到工具内部继电器反复跳变,是什么原因?答:请检查目标板上是否有严重短路。
(3)使用赛元SCLINK或者PRO52接入自动烧录机台,无法实现批量烧录,是什么原因?答:SCLINK没有依据文件指示把关联的所有信号线对号入座,PRO52是因为转接板型号不匹配导致。
二、烧录问题(1)赛元芯片进入STOP后电流有近几十UA异常,是什么原因?答:请检查进入STOP前有没有将模拟外设的电源关掉,比如说ADC电源。
(2)使用赛元DPT52供电,仿真时ADC偏差较大,是什么原因?答:使用DPT52供电不稳造成,请使用直流稳压电源仿真查看数据是否正常。
(3)赛元调试软件无法连接,是什么原因?答:请检查调试代码与调试软件是否匹配。
(4)用赛元SC92F8446内驱液晶,遇到某两路COMX出现鬼影,是什么原因?答:可能是LCD内部两路问题COM跟SEG层之间存在微弱导电,短路引起鬼影。
(5)用12MHZ系统时钟频率,待机功耗偏高,是什么原因?答:可通过降低系统时钟频率来改善,有降耗效果,但不明显,推荐同时从电源设计上降低能耗或者是增加睡眠时间。
(6)赛元SC92F7433芯片的P0.6口输出异常,始终无逻辑输出,是什么原因?答:T2MOD赋值0X01,允许定时器2作为递增/递减计数器所致。
(7)赛元SC92F7252芯片的EFT 2KV 2.5KHZ测试待机模式下可控硅导通,是什么原因?答:请确保电源是否符合常规。
(8)赛元LCD驱动出现闪屏,是什么原因?答:赛元LCD RAM无需清零,直接进行赋值就可以了,如果程序中先清零再赋值,有可能导致LCD出现闪屏现象。
欧陆590直流调速器调试步骤
欧陆590直流调速器调试步骤目录型号说明2操作面板的使用3接线41、主回路接线42、控制端子接线53、查看控制端子配置7默认控制端子基本接线8必要的修改参数10浏览内部设置11系统菜单目录13通电运行15中英文对照报警说明16附录参数表24一、型号说明担号变・t1WMJ^iSr59OP■590—4<?EK."T>zt>■-■|r-^.^=0■I JI _1jn-,凹他#t 磷卑oe JS*4dr 出电握-屉处值运牛竝曰r 丼为坦剩叮产皿蚣肛酋»n ]咗=1牛上L .CHI 壬占=1m A004O-4OA-0070-7OA <3110-]10A,盯15*二卩占启扎01ac»=L 8UA.□2:70=27U-A C380-S80A .OSOO-MIO-A25=725A.O 呂申"■呂3-OAdSOC»~SOO/k1」580—158O/\LZC»e>-1■1■Pg 宀卫二!M-卫二仙几・27<JIJ —27-UUA应翘心己皱脸•1口社i*ft 电i 旦叛血小 220O LC 22OV f±30*i>g ■创血 500(He500V <士JO^.,Nl/石CHz sew IMJC &OOV <±]i>^i.J 50L '«JHZ rIXiJr-Kj 4*5>占閒SDOicrfi.^nv r ±ECF^)<IJi l-C 炎'屯>-1•=*i!目他報m 连i ■內总LW :日:包齐q 4备以总fJLMirr 帜坦站在饰£扭而〉较备M*勒金证出kHIr 琴挤05CK1_(J4剧叫却用户用必rfj-」-HA.「比曲业工曲IM-讨鼓1食冷第三位揪件舉号aJh :准<[P20->的悍卩・面战越從 第到仇操作平白 0-尢燥tv T 吿 etui:5 ■»•円血『杓确址阳严帕界Jfrii/i.VUK-& ]-R=SiiFi-OEt-=Lfr v^i K 参nl 」IdFU [嗣好丁-谢7sp-1'if^i^Lft (爭也冃」IJK 务F 唧:iJT=止:比利带£⑥邑冃扌门IDA 务TMIO斥■•+.億了布JW :忙选的丘蹴类理鞘垃呢cjL'ii-^^/r-■+?<■(>>RAM =lllfl^.屯缶EMV =^P4HS t侍遥捜刑1EWP-^i^S 1卿科丸泮艸维一仃:逸、丨战璃比导汀雏一I :选!744*•叫僅・」:荷別•韋T MW?麺貳段罠裁的辿顾口=卫柞瑚锻邃J 嗯 E i W-EIAS<-11/l^.ic 如硕屮1吱期<RS46^il ) FROF=pTDrLbUN 切说 LJNK-IJNK L 糙粘1佛垃 H••it三卷牛宇徇堰电了辅助电浙o=z ■J^iH :W'U^S 1J s i^J 23tov 111;r^ro^t ]5筑歸HE *典宥人:1i 磺A.旳杂型豁4眄115=110V 崔U 22ty\'<11;lflT^.J-S0/MIH.ZZZ4>=ZZU¥i'J 244FV |正琵10%>A-S:-*-三位牛宁鞫规世『特祇工繰选戊羽川=從有牛卜轴i 选宜1二、操作面板的使用。
FANUC机器人调试常见问题解答30问

FANUC机器人调试常见问题解答30问FANUC机器人调试常见问题解答1、焊枪防碰撞信号怎么接?防碰撞功能需要使用EE接口,EE中一端接*XHNBK信,一端接24V,之后在系统--配置中启用手爪断裂功能2、机器人无法手动动作?确保无故障异常的情况下,检查示教器开关是否置on,模式开关是否牢靠拨到T1或T2,然后检查UI信号是否满足运行条件,必要时在系统--配置中关闭外部专用信号3、如何修改机器人运动范围?在系统--轴动作范围中可修改,但对于M-10iA和20iA系机器人应注意J6轴的外部管线安装方式,并在控制启动模式中先行修改。
4、如何在自动运行程序时直接达到100%速度?在程序中的运动指令前插入override指令,并设为1005、暂停后再启动?机器人没有报警、UI信号1、2、3、8为ON、UO信号1为ON,发送脉冲UI信号第6个可启动程序继续运行6、机器人输出为ON时没有输出24V?检查IO信号板上DOSRC输出信号公共端24V是否正常7、U盘插在TP上无法识别但控制柜上可以备份文件?R-30iA控制柜部分TP线缆不支持U盘,需更换为支持U盘的TP 线缆(A660-2006-T840)8、Mate柜主板是否支持视觉功能?Mate柜主板型号12位字母加数字组合的最后位为0的不支持视觉、1和2的主板支持视觉9、TP按钮启动程序?将程序设置为宏后可通过TP上按钮启动(宏启动设置为UK方式)10、寄存器最大能扩展到多少个?安装寄存器扩展功能后,数值寄存器的最大数扩展到5000个,位置寄存器的最大数扩展到2000个11、机器人密码功能分为几个等级?安装:可以分配用户名、密码、以及密码等级。
可以清除用户名和密码。
可以设定密码日志的有效/无效。
可以设定系统中的密码用户数。
可以执行设定、程序、操作者的所有操作。
(安装用户只可设定1人) 设定者:可以执行设定系统设定中通常进行操作。
程序师:可以执行较操作者用户更加高度的操作。
焊线机常见问题分析及调试方法
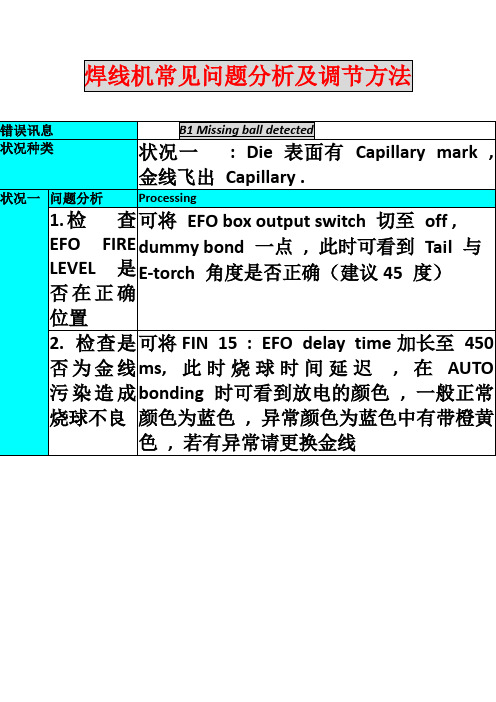
金线污染造 450 ms, 此时烧球时间延迟 , 在
成烧球不良 AUTO bonding 时可看到放电的颜
金线污
色 , 一般正常颜色为蓝色 , 异常
颜色为蓝色中有带橙黄色 , 若有
异常请更换金线
2 E-Torch 太 1 清洁 E-Torch 并 dry run 4 小时 (万不
脏
得已,请勿清洁) 并请勿使用砂纸
或受损,更换新的焊针
3 线夹不良 1 线夹间隙太小
4 金线问题 1 更换较软的金线
5 放线不程 1 降低 feed power
不良
1 因二焊点 1 二焊点的 power 太大,或 force 太
的振动太小
大造成 2 二焊点浮动
错误讯息 状况种类
Ball sift (I)
状况一: Pad 上没有球,且 PR monitor 上画面并无晃动 (海筮甚楼效应)
不良
2 Revise distance angle 太大可将 RDA
降低
3 Revise height 太低
4 EFO Current 太大
状况二
5 线尾参数设定太小,造成打火过程 中,打火打到焊针里
2 Capillary 1 错误使用焊针规格
不良
2 观察焊针印是否成圆形
3 将焊针拿至显微镜下观看是否脏污
3 E-Torch 污染 1 用酒精清洁 E-Torch ,必要时更换
之
4 EFO 放电不良 1 更换 EFO
5 Die 厚 / Die 1 反应 Die Bond 工程
高度
不一致`
6 Air diffuser 1 调整 air diffuser 设定 太大
7 共振
1 X Y table turning
库卡C4系统内部故障代码信息查询

库卡C4系统内部故障代码信息查询系统信息: KSS00001紧急停止00003信息提示缓冲区溢出00007输入/输出端驱动程序未准备就绪{驱动程序编号}{0}00011用于指令处理的任务栈(Task stack)太小00012提示过多00014SoftPLC: {参数}00016载入O 文件时出错00020外部急停00022主板温度太高00065驱动器驱动程序配置错误00066驱动器驱动程序轴位置错误00067确认操作人员防护装置00068无运行开通00069机器人驱动器的机器名不一致00070没有用户存储空间了00071对RDC 数据无存取权。
00072对整体中断不允许恢复(RESUME)00073短路制动激活00074安全控制器短路制动要求激活00075缺失的MDR 设备{设备名称}的参数设定00076IO 驱动程序‘{.}’已卸载。
I/O 地址映像未激活00078机器人停止:来自模块{模块名}语句编号{语句编号}的触发器子程序持续太久00079机器人停止:在{模块名} ({说明}) 中点PLC 的处理持续太久00080MDR: 预控驱动程序冲突00081由Submit(提交)引起的机器人停机00082由Submit(提交)引起的机器人停机00083由SoftPLC ({用于调出程序的任务}) 引起机器人停机00084由SoftPLC 引起机器人停机({用于调出程序的任务}) 00085读取{文件名}时出错({出错代码})。
00086初始化{模块名}时出错({出错代码})。
00106执行零点校正{轴编号}00107由于度盘调节而紧急停止00108转速停止k激活00110用耦合的附加轴不能进行优化运行00112$TOOL 无效:不能进行工作空间监控00113值域溢出{移动方向}{轴编号}00114超出编号为{工作空间编号}的工作空间00115清空编号为{工作空间编号}的工作空间。
00117碰撞监视轴{轴编号}00127{轴编号}异步附加轴00128异步轴{移动方向}{轴编号}的软件限位开关00132制动器损坏{轴编号}。
EtherCAT故障排查手册

EtherCAT故障排查手册一、EtherCAT及TwinCAT概述 (2)1.1 EtherCAT介绍 (2)1.2 EtherCAT通讯机制介绍 (3)1.3 TwinCAT介绍 (5)二、EtherCAT模块硬件诊断 (7)2.1 CX5020模块介绍及硬件诊断 (7)2.2 EK1100模块介绍及硬件诊断 (8)2.3 BK1250模块介绍及硬件诊断 (9)三、EtherCAT软件诊断方法 (11)3.1 WorkingCounter的作用和Sync unit同步单元设置 (11)3.1.1 WorkingCounter的作用 (11)3.1.2 同步单元设置原则 (11)3.1.3 同步单元的监测 (11)3.2 EtherCAT主站的状态字诊断 (13)3.2.1 Frame State (13)3.2.2 Frame Working Counter State (13)3.2.3 Slave Count和CfgSlaveCount (13)3.2.4 Device State Master (13)3.3 EtherCAT从站状态字诊断 (14)3.4通过Tcsyslog进行故障排查 (15)3.4.1开通FTP功能 (15)3.4.2开启TcSyslog(故障记录文件功能) ....................................... 错误!未定义书签。
3.4.3通过FTP功能把tcsyslog.txt文件拷出 (16)3.4.4查看并分析TcSysLog文件 (17)3.5 CRC、change count和Online state诊断 (17)3.5.1 CRC与change count (17)3.5.2 Online State诊断 (18)3.6 EtherCAT拓扑图 (20)3.7 Emergency Scan (21)四、典型的失效模式分类 (22)4.1 PLC到通讯模块的连接失效 (22)4.2模块与模块间的连接失效 (22)4.3 光电交换机的连接失效 (24)五、EtherCAT故障处理 (28)5.1更换故障模块 (28)5.2 CF卡数据备份 (29)一、EtherCAT及TwinCAT概述1.1EtherCAT介绍EtherCAT技术突破了其他以太网解决方案的系统限制:通过该项技术,无需接收以太网数据包,将其解码,之后再将过程数据复制到各个设备。
定时触发PLC程序
M490为故障触点,应当串联或并联在程序多个关键动作回路中。
X20为定时触发故障复位端子,要求该端子为没有被使用的端子(否则请更换为另一个没有被使用的端子)。
需要解除还没有被触发的故障或已经触发的故障时,将该触点和PLC的输入COM端短接即可。
如果系统当前时间还没到故障触发时间,一旦该端子与COM端子断开,故障将在预定时间触发!如果系统当前时间已经过了指定的故障触发时间,一旦该端子与COM端子断开,故障将立即触发!如果需要重新指定故障触发时间,就必须得更改指定的故障触发时间——需要对PLC进行编程! 该程序指定的故障触发时间为2007年1月1日0时0分0秒,可以进行更改。
该程序中所用到的通用继电器M481-M499、定时器T198、存储区D0-D5,请不要在程序的其它地方使用,否则该程序可能无法正常发挥作用。
对于三菱其它系列PLC或其它品牌PLC,请对程序作相应更改——各存储器请按照相应存储区域进行更改。
该程序并没有修改PLC的系统时钟,因此程序中的其它地方或和PLC通信的其它设备所调用的PLC系统时钟反映的是正确的当前日期和时间。
在程序动作之前,应当检查PLC的系统时钟是否正确反映当前日期和时间(因为PLC的默认系统时钟可能不正确,笔者就遇到过系统时钟快一个小时多一点的情况)。
检查方法如下: 启动三菱PLC编程软件GX Developer V7.08J(SW7D5C-GPPW)简体中文版到一个新的窗口,将电脑与PLC正确连接(具体连接方法请参阅相关说明<比如采用SC09连接电缆或等同功能电缆,加接U S B转R S232电缆(需要加安装驱动)等等>),然后点击“在线”——“PLC读取”——“确认”(对于部分笔记本电脑(比如顶星品牌龙尊系列某型号的笔记本电脑),默认串口为COM2,这种情况下需要将COM口选为COM2,具体操作方法不再赘述),然后选中“软元件内存”再点击“确定”......待软元件内存传送到电脑以后,马上检查M8018(年)、M8017(月)、M8016(日)、M8015(时)、M8014(分)、M8013(秒)是否大概是当前正确时间(请注意,软元件内存只是下载时的PLC内存,并不能实时反映PLC的当前软元件内存数据。
uart驱动调试方法
uart驱动调试方法UART驱动是一种用于串口通信的驱动程序,常用于嵌入式系统中。
调试UART驱动的目的是确保其正常工作,并排除可能的问题。
下面是一些调试UART驱动的方法:1.检查硬件连接:确保UART的引脚正确连接到目标设备上,并且没有虚焊、短路或其他硬件问题。
需要检查TX、RX、地线和电源线的正确连接。
2.配置正确的波特率:确认驱动程序和目标设备的波特率设置一致。
如果波特率设置不正确,通信将无法成功。
3.检查中断和DMA:如果使用中断或DMA进行数据传输,在调试过程中需要确保它们的配置和使用正确。
确认中断和DMA的初始化和处理函数是否正确,以及是否可靠。
4.使用调试工具:使用调试工具可以帮助检测和解决UART驱动的问题。
例如,使用示波器可以观察波形是否符合预期,使用串口调试助手可以查看发送和接收的数据。
还可以使用软件调试器来观察代码执行的过程。
5.打印调试信息:在驱动程序中添加打印语句,以便在运行时输出调试信息。
可以打印各种变量、标志位和状态信息,以便跟踪代码的执行流程。
这种方法可以帮助定位并解决问题。
6.内部测试模式:一些UART控制器提供了内部测试模式,可以自动生成和接收特定模式的数据。
通过使用内部测试模式,可以排除硬件和物理连接的问题,并检查驱动程序的正确性。
7.理解数据协议:UART驱动中很重要的一点是理解通信的协议。
要确保驱动程序正确地构造和解析数据帧,包括起始位、停止位、校验位和数据位。
8.分阶段调试:UART驱动的调试可以分成多个阶段进行。
首先,确保驱动程序可以正常初始化和配置。
然后,测试发送和接收数据的功能。
最后,检查错误处理和异常情况的处理。
9.必要时查看硬件文档:如果遇到了很棘手的问题,无法通过常规的调试方法解决,可以查看硬件文档或厂商提供的技术支持。
硬件文档可以提供关于UART控制器的详细说明和配置建议。
10.与其他设备协同调试:UART驱动通常会与其他设备进行通信,例如处理器、外设或其他串口设备。
三菱伺服J2S系列报警代码及其处理方法
三菱伺服J2S系列报警代码及其处理方法三菱伺服J2S系列是一款常用的伺服控制器,具有强大的功能和稳定的性能。
然而在运行过程中,有时会遇到报警代码,这意味着该系统出现了故障或异常情况。
为了维护和修复该伺服系统,了解报警代码及其处理方法是非常重要的。
在三菱伺服J2S系列中,常见的报警代码包括E0、E9、F5等等,下面将详细介绍这些报警代码及其处理方法。
1.E0报警代码:电源故障当伺服驱动器检测到电源电压异常时,会报出E0代码。
处理方法如下:-检查电源电压是否正常,如果低于额定值,则应检查输入电路。
-检查电缆连接是否松动或损坏,确保电源电缆连接牢固。
-如果电源正常,并且电缆连接也没有问题,那么可能是驱动器内部电源部分出现故障,需要更换驱动器。
2.E9报警代码:位移偏移报警当伺服驱动器检测到反馈器位移偏移异常时,会报出E9代码。
处理方法如下:-检查反馈器与驱动器之间的连接是否松动或错误。
确保连接正确,连接牢固。
-检查反馈器本身是否损坏,如果损坏,则需要更换反馈器。
-如果反馈器连接正确并且没有损坏,则可能是驱动器内部的电子元件出现问题,可能需要更换驱动器。
3.F5报警代码:速度命令格式错误当伺服驱动器接收到的速度命令格式不正确时,会报出F5代码。
处理方法如下:-检查速度命令输入是否正确,确保速度命令格式正确。
-确保输入速度命令的电路没有损坏,并且连接牢固。
-如果速度控制电路正常,但驱动器仍然报F5代码,则可能是驱动器内部的电子元件损坏,需要更换驱动器。
这些是三菱伺服J2S系列常见的报警代码及其处理方法。
在处理这些报警代码时,应该先确认报警代码的原因,并按照相应的处理方法进行修复。
尽量避免操作失误和不当使用导致的报警代码出现。
除了以上报警代码,三菱伺服J2S系列还有其他一些特定的报警代码,如E1报警代码表示电源电压过高、E3表示电流检测异常等。
处理这些报警代码的方法与前文类似,但具体的处理步骤可能会有所不同。
NC100M调试说明
设置网络模块
1、运行网络模块设置工具,出现如下界面
第一步、选择“新版NC200M”
第二步、点击“搜索”按纽
设置网络模块
找到网络模块了,双击列表中的IP地址
设置网络模块
网络模块的参数信息显示出来了
[1] [2] [3] [4] [5] [8] [7] [9]
[6]
一定要确认参数信息正确后再点击提交修改
如何关闭防火墙 在上图中将“启动类型(E)”改为“已禁止”,如果“服务状态”为“已启 动”,请点击“停止(T)”按纽,再点击“应用(A)”,最后点击“确定”退 出该服务属性设置。再找到“Windows Firewall/Internet Connection Sharing (ICS)”项,如下图:
编程工具
如上图所示,数据读取成功后,会将原来主机中设置过的 编程项一一显示出来
编程工具
如果需要修改报警主机中的某项编程项,只需要用鼠标选中 该项,然后在下拉列表中选择对应的数值或者输出需要的数 值即可。 需要修改的编程项修改完毕后,点击“提交数据”,输入工 程师密码,然后耐心等待进度条走完即可。 如果需要将设置好的参数保存下来,点击下方的“导出设置 “”
如何关闭防火墙 双击该项,弹出属性设置, 将“启动类型(E)”改为“已禁止” 。如 果“服务状态”为“已启动”,请点击“停止(T)”按钮,再点击“应 用(A)”,最后点击“确定”退出该服务属性设置。如下图:
Thanks
,弹出下图
如果发送数据和接受数据框中一直有数据在走,说明软件和报 警主机通讯一切正常,在此处可以判断出网络的通畅情况
编程工具
点击
,弹出下图
输入工程师密码(出厂默认1600),点击确定进入历史 记录查询界面,如下图: