4专题三:MSC.ADAMS风电机组仿真_图文(精)
基于MSC.ADAMS的动力传动系统建模与仿真

基于MSC.ADAMS的动力传动系统建模与仿真MSC.ADAMS是一款优秀的动力传动系统建模与仿真软件,在汽车、航空、航天等领域广泛应用。
通过MSC.ADAMS,可以对各种类型的动力传动系统进行建模与仿真,包括发动机、变速器、传动轴、差速器等。
动力传动系统建模是将传动系统各个部分进行分离,逐一建模并组装成一个整体,通过建模可以确定每个部件的性能与参数,以及系统整体的工作原理与性能。
在建模过程中,需要考虑各个部位的受力情况、材料属性、温度等因素,并进行物理学建模、数学建模和计算机辅助设计。
动力传动系统仿真是指将建模进行各种工况下的计算和分析,通过仿真可以确定不同工况下的系统性能和特性,从而优化每个部位的设计。
仿真的结果可以反映出系统的运行情况、动态响应、疲劳情况、噪声等各种细节,为系统的设计、制造和优化提供重要的参考依据。
MSC.ADAMS软件支持动力传动系统的建模和仿真,可以方便的进行各种级别的建模和仿真,包括单部件、子系统和整个系统的建模和仿真。
同时,MSC.ADAMS还支持多种不同的仿真方法,如动态仿真、静态仿真、多体仿真等,可以精确地模拟系统的行为。
在进行动力传动系统建模和仿真时,需要注意以下几点:1. 精确定义每个部位的材料属性和受力情况,包括张力、压力、扭矩等。
2. 确定每个部位的工作原理和控制方法,建立相应的数学模型。
3. 考虑系统的复杂度和耦合效应,因此需要对整个系统进行综合分析和优化。
4. 在进行仿真前,需要对模型进行验证和校准,以确保模型的准确性和可靠性。
总之,使用MSC.ADAMS进行动力传动系统建模和仿真,可以大大提高系统的设计和性能,为实现更高效、更安全的动力传动系统打下坚实的基础。
数据分析是指对所收集到的数据进行系统性分析和处理,通过对数据的分析可以发现内在的规律和价值,提供有关原因和结果的科学依据和参考,为决策提供依据和支持。
在不同领域中,数据分析的方法和技术也存在差异,但在基本原则和数据处理方法上却具有共性。
风力发电系统建模与仿真

风力发电系统建模与仿真摘要:风力发电作为一种清洁的可再生能源利用方式,近年来在世界范围内获得了飞速的发展。
本文基于风力机发电建立模型,主要完成了以下工作:(1)基于风资源特点,建立了以风频、风速模型为基础的风力发电理论基础;(2)运用叶素理论,建立了变桨距风力机机理模型;(3)分析了变速恒频风力发电机的运行区域与变桨距控制的原理与方法,并给出了机组的仿真模型,为风力发电软件仿真奠定了基础;(4)搭建了一套基于PSCAD/EMTDC仿真软件的风力发电系统控制模型以及完整的风力发电样例系统模型,并且已初步实现风力机特性模拟功能。
关键词:风力发电;风频;风速;风力机;变桨距;建模与仿真1 风资源及风力发电的基本原理1.1 风资源概述(1)风能的基本情况[1]风的形成乃是空气流动的结果。
风向和风速是两个描述风的重要参数。
风向是指风吹来的方向,如果风是从东方吹来就称为东风。
风速是表示风移动的速度即单位时间内空气流动所经过的距离。
风速是指某一高度连续10min所测得各瞬时风速的平均值。
一般以草地上空10m高处的10min内风速的平均值为参考。
风玫瑰图是一个给定地点一段时间内的风向分布图。
通过它可以得知当地的主导风向。
风能的特点主要有:能量密度低、不稳定性、分布不均匀、可再生、须在有风地带、无污染、分布广泛、可分散利用、另外不须能源运输、可和其它能源相互转换等。
(2)风能资源的估算风能的大小实际就是气流流过的动能,因此可以推导出气流在单位时间内垂直流过单位截面积的风能,即风能密度,表示如下:3ω= (1-1)5.0vρ式中,ω——风能密度(2W),是描述一个地方风能潜力的最方便最有价值的量;/mρ——空气密度(3kg);/mv ——风速(s m /)。
由于风速是一个随机性很大的量,必须通过一段时间的观测来了解它的平均状况,一个地方风能潜力的多少要视该地常年平均风能密度的大小。
因此需要求出在一段时间内的平均风能密度,这个值可以将风能密度公式对时间积分后平均来求得。
msc adams多体动力学仿真基础与实例解析

MSC Adams是一种常用的多体动力学仿真软件,它可以用于研究和分析机械系统、运动学和动力学特性。
下面简要介绍MSC Adams的基础知识和实例解析:
1. 多体动力学基础:
-刚体和连接:MSC Adams使用刚体模型来表示物体,可以定义物体的质量、惯性矩阵和几何形状。
通过连接件(约束)将多个物体连接在一起,可以模拟各种机构系统。
-动力学模型:通过定义物体的受力和力矩,可以建立动力学模型。
这些力可以包括重力、摩擦力、弹簧力等,可以根据需要进行自定义。
-运动学分析:可以分析物体的位置、速度、加速度以及各个连接件之间的相对运动关系。
2. 实例解析:
-车辆悬挂系统:通过建立车辆悬挂系统的多体动力学模型,可以分析车轮与地面的接触力、悬挂系统的行程和动态响应等。
这有助于改善车辆的悬挂性能和乘坐舒适性。
-机械臂运动学和动力学分析:通过建立机械臂的多体动力学模型,可以分析机械臂在不同工作状态下的位姿、速度和加速度。
这有助于优化机械臂的设计和运动控制算法。
-飞机起落架系统:通过建立飞机起落架系统的多体动力学模型,
可以分析起落架在着陆和起飞时的动态响应和受力情况。
这有助于改进起落架的设计和耐久性。
-振动系统:通过建立振动系统的多体动力学模型,可以分析系统的固有频率、振动模态和受力情况。
这有助于评估结构的稳定性和设计适当的减振措施。
以上是MSC Adams多体动力学仿真的基础知识和一些实例解析。
通过使用MSC Adams,工程师和研究人员可以更好地理解和优化复杂机械系统的动力学特性。
风力发电机运行仿真
基于MATLAB的“风力发电机运行仿真”软件设计摘要关键词1前言1.1 建模仿真的发展现状20世纪50-60年代,自动控制领域普遍采用计算机模拟方法研究控制系统动态过程和性能。
“计算机模拟”实质上是数学模型在计算机上的解算运行,当时的计算机是模拟计算机,后来发展为数字计算机。
1961年G.W.Morgenthler 首次对仿真一词作了技术性的解释,认为“仿真”是指在实际系统尚不存在的情况下,对于系统或活动本质的复现。
目前,比较流行于工程技术界的技术定义是系统仿真是通过对系统模型的实验,研究一个存在的或设计中的系统。
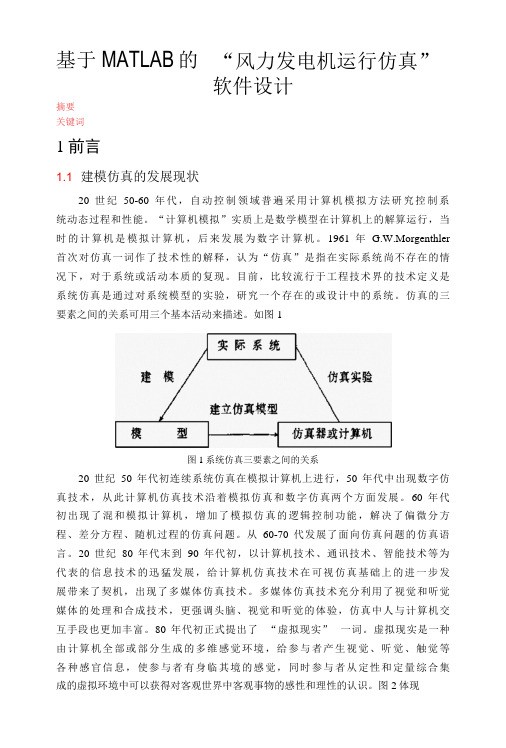
仿真的三要素之间的关系可用三个基本活动来描述。
如图1图1系统仿真三要素之间的关系20世纪50年代初连续系统仿真在模拟计算机上进行,50年代中出现数字仿真技术,从此计算机仿真技术沿着模拟仿真和数字仿真两个方面发展。
60年代初出现了混和模拟计算机,增加了模拟仿真的逻辑控制功能,解决了偏微分方程、差分方程、随机过程的仿真问题。
从60-70代发展了面向仿真问题的仿真语言。
20世纪80年代末到90年代初,以计算机技术、通讯技术、智能技术等为代表的信息技术的迅猛发展,给计算机仿真技术在可视仿真基础上的进一步发展带来了契机,出现了多媒体仿真技术。
多媒体仿真技术充分利用了视觉和听觉媒体的处理和合成技术,更强调头脑、视觉和听觉的体验,仿真中人与计算机交互手段也更加丰富。
80年代初正式提出了“虚拟现实” 一词。
虚拟现实是一种由计算机全部或部分生成的多维感觉环境,给参与者产生视觉、听觉、触觉等各种感官信息,使参与者有身临其境的感觉,同时参与者从定性和定量综合集成的虚拟环境中可以获得对客观世界中客观事物的感性和理性的认识。
图2体现了仿真科学与技术的发展进程。
仿真研究领域的扩展 一图2仿真科学与技术的发展以美国为代表的发达国家高度重视仿真技术的发展和应用。
美国等西方国家 除军事用途外的其它行业中的仿真技术及应用都居于世界领先水平,如飞行模拟 器、车辆运输仿真、电力系统、石油化工仿真系统等。
风力发电系统的动态建模与仿真

风力发电系统的动态建模与仿真随着全球对可再生能源的需求不断增长,风力发电作为一种清洁、可持续的能源形式受到了广泛关注。
风力发电系统的动态建模与仿真是研究和优化风力发电系统运行的重要手段,有助于提高风力发电系统的效率和可靠性。
本文将探讨风力发电系统动态建模与仿真的方法和应用,以及在模型开发和仿真过程中需要注意的问题。
一、风力发电系统的动态建模风力发电系统包括风力机、风能转换子系统、并网变频器、变电所和电网等组成部分。
为了对风力发电系统进行动态建模,需要考虑各个组件之间的相互作用和系统运行的特点。
1. 风力机的动态建模风力机是风力发电系统的核心部件,负责将风能转化为机械能。
风力机的动态建模需要考虑风速对风轮转速的影响、风轮转速对发电机转速的影响以及风轮和转子之间的功率传递过程。
一种常用的方法是使用变力学方程描述风力机的运动过程,并结合风力和风功率曲线进行模拟。
2. 风能转换子系统的动态建模风能转换子系统包括风能转换器、传动装置和发电机等。
风能转换器将机械能转化为电能,传动装置则负责将风力机的转速传递给发电机。
在进行动态建模时,需要考虑风能转换器和传动装置的效率、传动过程中的能量损耗以及发电机的电力输出特性。
3. 并网变频器和变电所的动态建模并网变频器和变电所是将风力发电系统产生的电能接入电网的关键设备。
并网变频器的主要功能是将发电机输出的低频交流电转换为电网所需的高频交流电,同时负责控制电网功率的调节。
变电所则负责将风电场产生的电能集中输送到电网。
在进行动态建模时,需要考虑并网变频器和变电所的功率转换过程、电力损耗以及对电网供电稳定性的影响。
二、风力发电系统的仿真风力发电系统的仿真可以通过使用专业的仿真软件或自行开发仿真模型来实现。
仿真可以帮助研究人员和工程师在实际运行之前评估系统性能、验证设计和控制方案的有效性,以及优化风力发电系统的运行策略。
1. 仿真软件的选择和应用目前市场上有多种风力发电系统仿真软件可供选择,例如,DigSilent、PSCAD、Matlab/Simulink等。
风力发电系统模型搭建与仿真分析
风力发电系统模型搭建与仿真分析采用小型永磁同步电机分析模型并且忽略其磁饱和度。
永磁发电机的数学模型如下:(3-8)代表永磁发电机在d 轴流过的电流,u d代表发电机在d 轴上的电压,L d 代表永磁式中id发电机在d 轴上的电感。
i q 代表永磁发电机在q 轴流过的电流,u q 代表发电机在q 轴上的电压,L q 代表永磁发电机在q 轴上的电感。
发电机角速度是①e ,发电机定子电阻是R a ,发电机的电磁转矩是T e 。
发电机永磁体磁链是Ψ。
当转子表面装有磁铁时,有效气隙可视为常数。
这是因为永磁材料相对磁导率大概一致[55] 。
所以d轴与q轴同步电感一致,即L d =L q =L 化简为:(3-9)其中T与成i q 正比。
如果发电机电磁转矩变大,系统中的定子电流也会随之变大,e进而对定子电流进行控制,使得发电机电磁转矩与风力涡轮输出转矩T 均衡,实现最大功率输出。
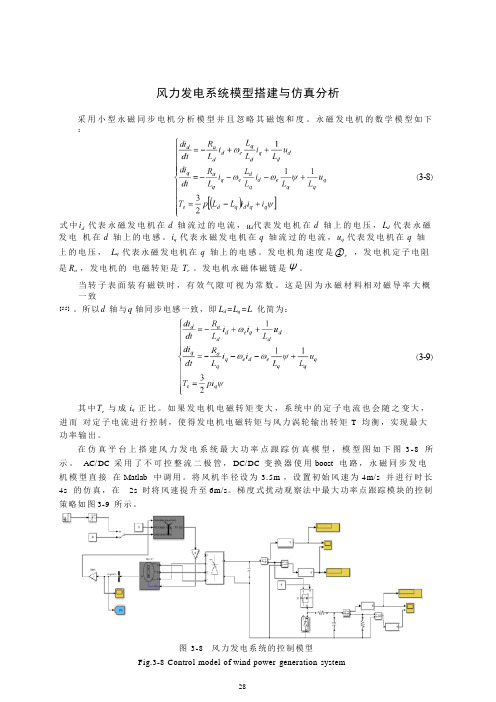
在仿真平台上搭建风力发电系统最大功率点跟踪仿真模型,模型图如下图3-8 所示。
AC/DC 采用了不可控整流二极管,DC/DC 变换器使用boost 电路,永磁同步发电机模型直接在Matlab 中调用。
将风机半径设为3.5m ,设置初始风速为4m/s 并进行时长4s 的仿真,在2s 时将风速提升至6m/s。
梯度式扰动观察法中最大功率点跟踪模块的控制策略如图3-9 所示。
图3-8 风力发电系统的控制模型Fig.3-8 Control model of wind power generation system28图 3-9 风力发电最大功率跟踪模块Fig.3-9 Wind power generation maximum power tracking module永磁同步电机参数情况如下表 3-1 所示。
表 3-1 永磁同步电机参数Tab.3-1 Parameter of synchronous machine名称参数大小额定转速(rad/s ) 40 转动惯量(kg/m 2) 0. 189 定子绕组电阻 (Ω) 0.05 定子绕组电感( m H )7. 15 极对数 34 磁链(Wb )0. 1892风力发电系统最大功率跟踪仿真曲线如图 3-10 和 3-11 所示。
MATLAB在风力发电技术中的应用仿真(共33张)

图9-2 基于普通(pǔtōng)感应发电机的定速风电机组
第4页,共33页。
0.5 0.4 0.3
C p 0.2
0.1
0o
10o
2.5o
5o
0.0
-0.1 0
25o
2
4
6
15o
8 10 12 14 16
图9-3 关系(guān xì)曲线
第5页,共33页。
wi n d tu rb i n e 1
Vdc
Vdc (V)
wr
Speed (pu)
pitch pitch angle (deg)
图9-12
wi n d tu rb i n e 2
Trip
Wi n d T urbi ne Pro te cti o n
Trip Time
0
[T ri p_WT ]
0
Phasors pow ergui
第25页,共33页。
信号 1~3 4~6 7~8 9~11
表9-2 双馈变速风电机组输出(shūchū)信号
信号名称 Iabc(cmplx) (pu) Vabc(cmplx)(pu) Vdq_stator(pu) Iabc_stator (cmplx)(pu)
信号定义
以发电机额定电压为基准 值的流入风电机组端口电流 相量
A
A
B
B
C
C
Line1
A B C Three-Phase Fault
<wr (pu)> <P (pu)> <Q (pu)>
|u| <Vabc (cmplx) (pu)>
y From Workspace
基于Adams的风力发电机偏航系统动力学仿真

中图分类号 : T M 3 l 5
文献标志码 : A
文章编号 : 1 0 0 7 — 4 4 1 4 ( 2 0 1 7 ) 0 卜0 0 1 8 — 0 3
Dyn ami c s Si m ul at i o n o f Wi nd Tu r bi ne Ya w S ys t e m Ba s e d o n Ada ms
研究与分析
d o i : 1 0 . 1 6 5 7 6 / j . c n k i . 1 0 0 7 — 4 4 1 4 . 2 0 I 7 . 0 1 . 0 0 6
2 0 1 7 第1 期( 第3 0 卷 , 总 第1 4 7 期 ) ・ 杌 械 研 电机 偏 航 系统 动 力学 仿 真
S HI F e n g‘ . HOU ’ ZU O -f l 】
( . S c h o o l r J / 肘∽h a n i c a l E n g i n e e r i n g,Y a n g t z e U n i v e r s i t y , J i n g z h o u H u b e i 4 3 4 0 2 3 ,C h i n a ;
石 峰 ! , 侯 作富 ’
( 1 . 长江大学 机械工程学院 , 湖北 荆 州 4 3 4 0 2 3 ; 2 . 湘 电 风 能 有 限公 司 , 湖南 湘潭 4 1 I 1 0 2 )
摘
要 :在 多体 动 力 学 软 件 A d a m s中 建 立 了风 力发 电机 的模 型 , 包括 : 偏航 电机 、 偏 航 齿轮 机 构 、 偏航制动器 、 机舱 、 塔
me n t o f t h e v a w n l o t o r i s r e a s o n a b l e o r n o t i s i u d g e d ,a n d t h e n u mb e r o f d i s a b l e d v a w n l o t o r i n n o r n l a l w o r k i s e s t i ma t e d,t h u s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风电机组关键结构部件有限元分析培训专题三MSC ADAMS 专题三:MSC.ADAMS风电机组仿真陶永忠MSC.Software 公司北京办事处DISCLAIMERMSC.Software Corporation reserves the right to make changes in specifications and other information contained in this MSC Software Corporation reserves the right to make changes in specifications and other information contained in this document without prior notice.The concepts, methods, and examples presented in this text are for illustrative and educational purposes only, and are not intended to be exhaustive or to apply to any particular engineering problem or design. MSC.Software Corporation assumes no liability or responsibility to any person or company for direct or indirect damages resulting from the use of any li bilit ibilit t f di t i di t d lti f th finformation contained herein.User Documentation: Copyright©2005 MSC.Software Corporation. Printed inU.S.A. All Rights Reserved.y yThis notice shall be marked on any reproduction of this documentation, in whole or in part. Any reproduction or distribution of this document, in whole or in part, without the prior written consent of MSC.Software Corporation is prohibited.MSC and MSC. are registered trademarks and service marks of MSC.Software Corporation. MSC.Actran, MSC.ADAMS, MSC.Dytran, MSC.EASY5,MSC.FlightLoads, MSC.Fatigue, MSC.Marc, MSC.Marc Mentat, MSC.Nastran,MSC.Patran, minate Modeler, MSC.Mvision, MSC.Robust Design, SimDesigner, MSC.SimManager, MSC.SOFY,MSC Laminate Modeler MSC Mvision MSC Robust Design SimDesigner MSC SimManager MSC SOFYMSC.visualNastran Desktop, and MSC.visualNastran for Windows are all trademarks of MSC.Software Corporation. NASTRAN is a registered trademark of the National Aeronautics and Space Administration. MSC.Nastran is an enhanced proprietary version developed and maintained by MSC.Software Corporation.All other trademarks are the property of their respective owners.All other trademarks are the property of their respective owners风电机组结构完整的风电机组仿真平台AeroDyn 气动载荷计算AdamsADAMS 系统模型——塔架、叶片、机舱、传动系、约束、载荷等线性/非线性FEA FAST 前处理MATLAB/Simulink控制系统——偏航、桨距角、刹车控制等应力应变分析EASY5液压系统弹性体模拟FEA 详细的齿轮系统模型详细的轴承系统模型疲劳分析软件疲劳寿命分析前处理过程成模型FAST前处理过程生成模型•FAST为NREL开发的ADAMS软件前处理软件,替代原来的ADAMS/WT•FAST使用过程:拷贝练习文件到e:\wt_exercises〉命令提示符开始—〉所有程序—〉附件—〉命令提示符,进入DOS操作窗口cd wt_exercises(进入练习目录wt exercisesfast test12.fst(生成ADAMS模型,包括一个adm文件和个acf文件文件和一个Dir test* 查看一下是否生成相应文件。
开始MSC software •—〉所有程序—〉MSC.software—〉MD ADAMSR3—〉Aview—〉ADAMS View,或直接点击桌面上ADAMS/View的快捷方式进入ADAMS/View。
•按照下图设置,点击OK键进入。
•在随后出现的文件导入对话窗口中选择:•导入的模型如右图所示:在主工具箱内选择显示下视图•在主工具箱内选择,显示下视图:熟悉ADAMS,并设置视图方向并设置视图方向•熟悉ADAMS/View中对视图的操作–t ——移动–r ——转动–w——局部–f ——全图–shift+f——正视图–……•从Tool菜单下选择Commandnavigater,并选择命令:并选命令导入刚生成的ADAMS/Solver文件•选择file—〉Import,导入acf文件file导入设置图标大小•setting—〉icons, 从setting弹出右图所示的对话窗,在New Size中输入0.4,选择OK按钮。
04设置Solver选项•Setting—〉Solver—〉从菜单Setting SolverExcutable,按照右图所示进行设置,设置完成后选择Close按钮。
在ADAMS中进行脚本仿真•Simulation—〉菜单SimulationScripted Simulation,按照右图所示进行设置,设置完成后选择按钮开始进行脚本仿真。
仿真过程会弹出信息窗口,如下图所示。
观察仿真结果从菜单R i•Review —〉Animation Controls,按照右图所示进行设置,设置按钮完成后选择按钮。
观察仿真结果•Review —〉Postprocessing,进入后从菜单R i P t i进入后处理界面。
下图所示为塔架基座处所受到X、Y方向的载荷观察仿真结果•Review —〉Postprocessing,进入后处从菜单R i P t i进入后处理界面。
下图所示为叶片1上第一段所受到X、Y方向的风载荷•File —〉Import,按照下图输入参数,从菜单Fil I t按照下图输入参数pp y 选择Apply按钮导入导流罩几何外形。
•同样按照下图输入参数导入第一个叶片几何外形同样按照下图输入参数,导入第一个叶片几何外形。
•修改Orientation为0,120,0,再次导入第二个叶片几何外形。
•修改Orientation 为0,‐120,0,再次导入第三个叶片几何外形。
次导入第个叶片何外形从菜单Fil I t按照下图输入参数•File —〉Import,按照下图输入参数, pp y 选择Apply按钮导入机舱几何外形。
删除原来的CAD几何外形删除机舱和导流罩上原有的几何外形从菜单•删除机舱和导流罩上原有的几何外形,从菜单Edit 下选择Delete。
从菜单•Simulation —〉Simulation Script —〉Modify,在弹出的数据库导航器中选择Script_1,并增加一行,如下图所示,再择Ok按钮。
如下图所示再择按钮从菜单Controls 再次运行仿真并观•Simulation —〉Scripted ,再次运行仿真并观察模型各阶振动模态。
d t t 为该风机系统的模态•文件mode.txt 为该风机系统的模态。
在控制分析此•ADAMS中可以进行简单的PID控制分析。
此处以偏航控制为例进行说明当然可以与处以偏航控制为例进行说明,当然也可以与控制软件如MATLAB、EASY5进行复杂控制系统与机械系统的联合仿真。
统与机械系统的联合仿真修改模型中控制偏航的力矩_•YawActuator SF 如下所示。
修改模型中控制偏航的命令变量YawPosDemand V •YawPosDemand_V 如下所示,然后选择OK按钮。
修改模型中控制偏航的命令变量YawRateDemand V •YawRateDemand_V 如下所示,然后选择OK按钮。
进行控制——机械耦合分析•新建模型中仿真脚本如下所示,然后选择OK按钮。
新建模型中仿真脚本如下所示然后选择按钮风电机组关键结构部件有限元分析进行控制——机械耦合分析•使用新的仿真脚本进行仿真,仿真结束后进入动画和后处使用新的仿真脚本进行仿真仿真结束后进入动画和后处理,观察一下机舱的偏航情况。
进行机械刚弹耦合分析•将模型中导流罩用弹性体进行替换,以进行刚弹耦合分析。
进行机械刚弹耦合分析•替换后的模型如下图所示。
替换后的模型如下图所示谢谢!。