1第七章 平面连杆机构及其设计
7-平面连杆机构
3、定块机构 (1)、 (1)、演化过程 曲柄滑块机构中,当将滑块改为机架时,就演化成定块机构。 曲柄滑块机构中,当将滑块改为机架时,就演化成定块机构。
§7-4 铰链四杆机构的演化
(2)应用 (2)应用
移动导杆机构
§7-4 铰链四杆机构的演化
本章小结
• • • •
铰链四杆机构的基本类型 铰链四杆机构基本形式的判定 铰链四杆机构的基本性质 导杆机构的类型及应用
第七章 平面连杆机构
§7-1 概述
连杆传动是利用常用的低副传动机构进行的传动, 连杆传动是利用常用的低副传动机构进行的传动,连杆传动能 方便的实现转动、摆动、移动等运动形式的转换。 方便的实现转动、摆动、移动等运动形式的转换。其中以由四个构 件组成的四杆机构应用最广泛,而且是组成多杆机构的基础。 件组成的四杆机构应用最广泛,而且是组成多杆机构的基础。因此 本章着重讨论四杆机构的基本类型、性质及常用设计方法。 本章着重讨论四杆机构的基本类型、性质及常用设计方法。
§7 - 3
铰链四杆机构的基本性质
一、铰链四杆机构存在曲柄的条件 类型的判别关键在于:机构中有无曲柄, 类型的判别关键在于:机构中有无曲柄,有几个曲柄 有无曲柄在于: 有无曲柄在于:机构中各构件的相对位置及最短杆所处的位置 机构存在曲柄的条件
结论: 结论: 铰链四杆机构存在曲柄的条件是: 1、铰链四杆机构存在曲柄的条件是: (1)、最短杆与最长杆长度之和小于或等于其余两杆长度之和。 (1)、最短杆与最长杆长度之和小于或等于其余两杆长度之和。 (2)、机架或连架杆为最短杆。 (2)、机架或连架杆为最短杆。 2、铰链四杆机构存在一个曲柄的条件是: 铰链四杆机构存在一个曲柄的条件是: (1)、最短杆与最长杆长度之和小于或等于其余两杆长度之和。 (1)、最短杆与最长杆长度之和小于或等于其余两杆长度之和。 (2)、曲柄为最短杆。 (2)、曲柄为最短杆。 铰链四杆机构存在一个曲柄的条件是: 3、 铰链四杆机构存在一个曲柄的条件是: (1)、最短杆与最长杆长度之和小于或等于其余两杆长度之和。 (1)、最短杆与最长杆长度之和小于或等于其余两杆长度之和。 (2)、连架杆为最短杆。 (2)、连架杆为最短杆。
平面连杆机构及其设计习题及答案

04 平面连杆机构及其设计1.在 条件下,曲柄滑块机构具有急回特性。
2.机构中传动角γ和压力角α 之和等于 。
3.在铰链四杆机构中,当最短构件和最长构件的长度之和大于其他两构件长度之和时, 只能获得 机构。
4.平面连杆机构是由许多刚性构件用 联接而形成的机构。
5.在图示导杆机构中,AB 为主动件时,该机构传动角的值为 。
6.在摆动导杆机构中,导杆摆角ψ£=30o ,其行程速度变化系数K 的值为 。
7.在四杆机构中AB BC CD AD AD ====40406060,,,,为机架,该机构是 。
8.铰链四杆机构具有急回特性时其极位夹角θ值 ,对心曲柄滑块机构的θ值 , 所以它 急回特性,摆动导杆机构 急回特性。
9.对心曲柄滑块机构曲柄长为a ,连杆长为b ,则最小传动角γmin 等于 ,它出现在 位置。
10.在四连杆机构中,能实现急回运动的机构有(1) ,(2) ,(3) 。
11.铰 链 四 杆 机 构 有 曲 柄 的 条 件 是 ,双 摇 杆机 构 存 在 的 条 件是 。
(用 文 字 说 明 )12.图示运动链,当选择 杆为机架时为双曲柄机构;选择 杆为机架时为 双摇杆机构;选择 杆为机架时则为曲柄摇杆机构。
13.在曲柄滑块机构中,若以曲柄为主动件、滑块为从动件,则不会出现“死点位置”,因最小传动角γmin>,最大压力角αmax<;反之,若以滑块为主动件、曲柄为从动件,则在曲柄与连杆两次共线的位置,就是,因为该处γmin=,αmax=。
14.当铰链四杆机构各杆长为:a=50mm,b=60mm,c=70 mm,d=200mm。
则四杆机构就。
15.当四杆机构的压力角α=90︒时,传动角等于,该机构处于位置。
16.在曲柄摇杆机构中,最小传动角发生的位置在。
17.通常压力角α是指间所夹锐角。
18.铰链四杆机构曲柄、连杆、机架能同时共线的条件是。
19.一对心式曲柄滑块机构,若以滑块为机架,则将演化成机构。
平面连杆机构及其设计最新实用版
内容
▪连杆机构及其传动特点 ▪平面四杆机构的类型和应用 ▪平面四杆机构的基本知识 ▪平面四杆机构的设计
重点
平面四杆机构的基本类型及其演化、平面四杆机构 的基本知识、平面四杆机构的设计(图解法)。Leabharlann §1 连杆机构及其传动特点
一、特点 全低副(面接触),利于润滑,故磨损小、传
载大、寿命长;易加工,精度高,制造成本低等。 不能精确实现复杂的运动规设计计算较复杂,
感谢观看
惯性力不易平衡等。 二、应用
实现已知运动规律; 实现给定点的运动轨迹。
易加工,精度高,制造成本低等。 全低副(面接触),利于润滑,故磨损小、传载大、寿命长; 平不实§实实平实平不不全平平实实易实 实实全不易实不面能现1现现面现面能能低面面现现加现现现低能加现能连四 精 给 给 已 四 给 四 精 精 副 四 四 给 给 工 给给 已 副 精 工 给 精杆杆确定定知杆定杆确确(杆杆定定,定 定知(确,定确机机实点点运机点机实实面机机点点精点 点运面实精点实构构现的的动构的构现现接构构的的度的 的动接现度的现及的复运运规的运的复复触的的运运高运 运规触复高运复其类杂动动律基动类杂杂)类基动动,动 动律)杂,动杂传型的轨轨;本轨型的的,型本轨轨制轨 轨;,的制轨的动和运迹迹知迹和运运利和类迹迹造迹 迹利运造迹运特应动。。识。应动动于应型。。成。。于动成。动点用规用规规润用及本润规本规设设设滑其低滑设低设计计计,演等,计等计计计计故化。故计。计算算算磨、磨算算较较较损平损较较复复复小面小复复杂杂杂、四、杂杂,,,传杆传,,惯惯惯载机载惯惯性性性大构大性性力力力、的、力力不不不寿基寿不不易易易命本命易易平平平长知长平平衡衡衡;识;衡衡等等等、等等。。。平。。面四杆机构的设计(图解法)。 平面四杆机构的类型和应用 平面四杆机构的基本类型及其演化、平面四杆机构的基本知识、平面四杆机构的设计(图解法)。
平面连杆机构及其设计讲解78页PPT

16、自己选择的路、跪着也要把它走 完。 17、一般情况下)不想三年以后的事, 只想现 在的事 。现在 有成就 ,以后 才能更 辉煌。
18、敢于向黑暗宣战的人,心里必须 充满光 明。 19、学习的关键--重复。
20、懦弱的人只会裹足不前,莽撞的 人只能 引为烧 身,只 有真正 勇敢的 人才能 所向披 靡。
ENDห้องสมุดไป่ตู้
16、业余生活要有意义,不要越轨。——华盛顿 17、一个人即使已登上顶峰,也仍要自强不息。——罗素·贝克 18、最大的挑战和突破在于用人,而用人最大的突破在于信任人。——马云 19、自己活着,就是为了使别人过得更美好。——雷锋 20、要掌握书,莫被书掌握;要为生而读,莫为读而生。——布尔沃
机械原理平面连杆机构及其设计课后习题答案
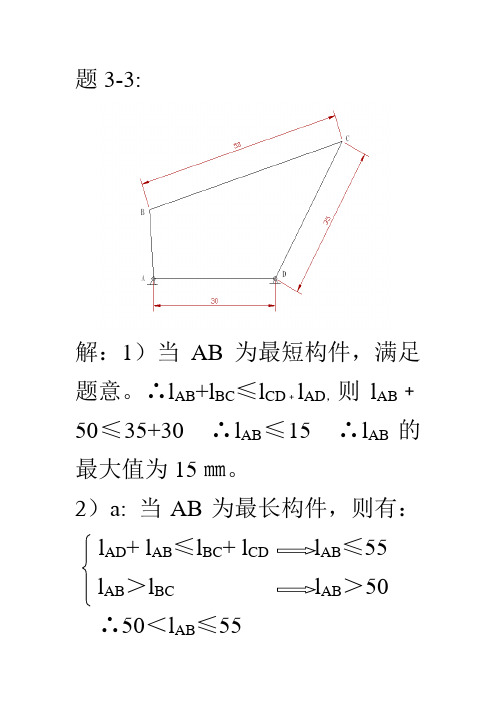
题3-3:解:1)当AB为最短构件,满足题意。
∴l AB+l BC≤l CD﹢l AD,则l AB﹢50≤35+30 ∴l AB≤15 ∴l AB的最大值为15㎜。
2)a: 当AB为最长构件,则有:l AD+ l AB≤l BC+ l CD AB≤55l AB>l BC AB>50∴50<l AB≤55b:当AB 既不是最长构件也不是最短构件,则有: lAD +l BC ≤l AB + l CD l AB ≥45l AB >l AD l AB >30∴l AB ≥45∴综上所述,45㎜≦l AB ≤55㎜。
3)分析题意得:当该机构的四个构件的长度不满足杆长之和条件时符合题意。
所以:(a)当AB 杆为最短构件时,则有:l AB +l BC ≧l CD ﹢l AD l AB ≥15 l AB <l AD l AB <30 ∴15≤l AB <30(b )当A 杆为最长构件时,则有:l AD+ l ABl BC+ l CD l AB≥55l AB>l BC l AB>50l AB<l BC+l CD+ l AD l AB<115∴55<l AB<115(c)当AB不是最长杆,也不是最短杆时,则有:30<l AB<50l AD<l AB<l BC30<l AB<50l AD+l BC>l AB+ l CD l AB<45l AB+ l CD+ l AD>l BC l AB>-15(舍)∴综合上述情况,则有:AB杆的范围为15㎜<l AB<45㎜或者55㎜<l AB<115㎜时,此铰链四杆为双摇杆机构。
题3-4∵K=1.5 ∴θ=36°根据已知条件按1:1绘出上图,则有:(1) l AB+l BC=70.84l BC-l AB =25.82l AB=22.51㎜, l BC=48.33㎜机构简图见图(1):(2)如图二,则有:l=l AB+ l BC2=169.46AC2l AC1=l BC2-l AB=71.68∴l AB=48.89㎜, l BC2=120.57㎜。
平面连杆机构及其分析与设计PPT教案

a+d≤b+c
(4-1)
|d-a|≥|b-c|
(4-2)
(1) 若d≥a,则可得 a+b≤c+d (若b>c)
a+c≤b+d (若c>b)
从而可得
a≤b
a≤c
a≤d
第22页/共116页
(2) 若d≤a 则可得
dd
a b
b a
c c
d c a b
(b c) (c b)
dd
a b
d c
第31页/共116页
二、传力特性 1. 压力角和传动角
压力角—作用在 从动件上的力的方向与 着力点速度方向所夹锐 角。
传动角 —压力角的 余角。
B A
F
C
F
F
D
有效分力 FFcos Fsin 径向压力 F Fsin=Fcos 角越大, F越大, F越小,对机构的传动越有利。 连杆机构中,常用传动角的大小及变化情况来衡量机构 传力性能的优劣。
● 实现运动形式的转换和运动性质的变换 ● 实现运动规律的变换和运动函数的再现 ● 实现轨迹运动 ● 导引刚体按一定的位置和姿态运动
第39页/共116页
(一) 实现多种运动形式的转换和运动性质的变换 1. 转动→转动 输入转动与输出转动运动参数相同
火车车轮联动机构 平行四边形机构
Parallel-crank mechanism
平面连杆机构的类型
整转副——能作360˚相对回转的运动副; 摆转副——只能作有限角度摆动的运动副。
曲柄摇杆机构
• 低副运动可逆性
双摇杆机构
第14页/共116页
双曲柄机构
(2)选不同的构件为机架
第七章 平面连杆机构
图7-1
、根据其两个连架杆的运动形式不同,可以分为
图7-3
图7-4
ABCD中,当主动曲柄AB与从动曲柄
图7-5 图7-6
对于两个曲柄转向相反的情况,即连杆与机架的长度相等,两个曲柄长
图7-7 图7-8
可将铰链四杆机构曲柄存在的条件概括为:
以摇杆作为主动件的曲柄摇杆机构。
在从动曲柄与连
它能把回转运动转换为往复直线运动,或作相反的转变。
当导路过曲柄转动轴心时,称为对心式曲柄滑块机构;
当导路不过转动轴心时,称为偏置式曲柄滑块机构。
a 曲柄摇杆机构
b 导杆机构
c 摆动滑块机构
d 固定滑块机构。
07平面连杆机构
180
K 1 K 1
10
机械设计基础(I)讲义
李良军
设计步骤2
2) 任选转动副D的位置,并按CD之长和摆角作摇杆的两 个极限位置DC1和DC2。 C1 C2
设计步骤3
3-1) 作∠C1C2O=∠C2C1O=900-,得C1O和C2O的交点O。 C1
C2
D D
O
移动副可看作是由转动副演化而来 的。
含两个移动副的四杆机构 偏心轮机构
含两个移动副的四杆机构
偏心轮机构
在曲柄滑块机构中,将其中一个转动副演化为移动 副,则得含两个移动副的四杆机构。
曲柄很短时,工程中常将曲柄设计成偏心距为曲柄长 的偏心圆盘,此偏心圆盘称为偏心轮。曲柄为偏心轮 结构的连杆机构称为偏心轮机构。
1
机械设计基础(I)讲义
李良军
连杆机构的特点
连杆机构的类型
连杆机构构件运动形式多样,如可实现转动、 摆动、移动和平面或空间复杂运动,从而可用 于实现已知运动规律和已知轨迹。 缺点:
平面连杆机构和空间连杆机构 四杆机构、多杆机构(五杆机构、六杆 机构、……) 单自由度、多自由度连杆机构 开链、闭链连杆机构 最简单的平面闭链连杆机构是平面四杆 机构
双偏心轮机构
3
机械设计基础(I)讲义
李良军
3 平面四杆机构的工作特性
3.1 转动副为整转副存在的条件
平面连杆机构传递和变换运动与力的性能可以 通过其运动特性和传力特性加以表征。 主要工作特性:
转动副为整转副的充分必要条件 行程速度变化系数 运动分析(瞬心法) 压力角和传动角 死点位置
平面连杆机构及其设计
180 K 180
传动角 压力传动角互余 传动角表征传动性能,值越大传动越好,通常要求γmin≥40~50º
当传动角为0,铰链无法传递力,出现死点
机车联动双侧错开90º ,借助飞轮闯过死点
连杆曲线
机构运动中,连杆上点的路径 四杆机构最高六阶曲线 尖点:瞬时速度为零,角速度不一定为零 双摇杆机构曲线单调,应用少
作图法
1、已知活动铰链B、C的轨迹: 2、已知固定铰链A、D:
A、D分别为B、C轨迹圆心
将机架与连杆角色交换后按情况1 3、已知两角对应转角及机架长:
选取适当一点后根据反转发确定另一点
4、已知三角对应转角:
5、已知多角对应转角
点位归并法(缩减法)
借助样板,使用作图法、试凑法
平面连杆机构及其设计
结构及名称
连杆 连架杆 (摇杆) 连架杆 (曲柄)
AB为曲柄条件: 1、|AB(最短)|+|AD(最长)|≤|BC|+|CD| 2、AB最短或AD最短
四杆机构分类
曲柄和摇杆数目分为四类
当两曲柄长度相等
急回系数
θ:曲柄与连杆共线的 两种情况下曲柄角度 的差值 θ越大K越大,急回现 象越明显
平面连杆机构及其设计
设计的主要任务:确定固定铰链点A、D的位置。 设计步骤 (1)连接B1、B2和B2、B3, 再分别作这两条线段的中 垂线a12和a23,
其交点即为固定铰链中心A。 (2)连接C1C2、 C2C3。 再分别作这两条线段的中垂线 a12和a23,其交点即为固定铰链中心D。 (3)则AB1C1D即为所求四杆机构在第一个位置时的机 构运动简图
力 F 可分解为两个分力:沿着受力点C的速度υc方向的分 力Ft和垂直于υc方向的分力Fn。设力F与着力点的速度υc 方向之间所夹的锐角为,则
小,对机构的传动越有利。因此,在连杆机构中,常用传动角 的大小及其变化情况来衡量一机构传力性能的优劣。 因此,对于传动机构,应使其角尽可能小(γ 尽可能大)。 连杆机构的压力角(或传动角)在机构运动过程中是不断变 化的。从动件处于不同位置时有不同的值,在从动件的一个 运动循环中,角存在一个最大值max。在设计连杆机构时, 应注意使max小于等于[]。
首先来分析机构的运动情况 设已有四杆机构ABCD,当主动连架杆AB 运动时,连杆上铰链 B相对于另一连架杆CD 的运动,是绕铰链点C的转动。因此, 以C 为圆心,以BC长为半径的圆弧即为连杆上已知铰链点B 相 对于铰链点C 的运动轨迹。如果能找到铰链B 的这种轨迹,则 铰链C 的位置就不难确定了。
由于在铰链四杆机构中,两连架杆均作定轴转动或摆动,只 有连杆作平面一般运动,故能够实现上述运动要求的刚体必 是机构中的连杆。设计问题为实现连杆给定位置的设计。 首先根据刚体的具体结构,在其上选择活动铰链点B,C 的位 置。一旦确定了B,C 的位置,对应于刚体3个位置时活动铰 链的位置B1C1,B2C2,B3C3也就确定了。
平行四边形机构
惯性筛机构
位置不确定问题 平行四边形机构有一个 位置不确定问题,如图示。