惯性力矩定义及求法
第20讲义章惯性力
M IzM z(F Iit) m ir i r i ( m ir i2 ) J z 14
第二十章 惯性力
综上所述,惯性力系向转轴上一点O简化的主矩为
M IOM IxiM IyjM Izk
如果刚体有质量对称平面,切该平面与转轴z垂直,简化中 心O取为 此平面与转轴的交点,则有
F IR P gaCP g(aAaC t )A F Ie F Ir
式中
FIeP gaA,FIrP gaC t A
惯性力系向质心简化得主矩为
M IC
J C
1 12
P l 2
g
1P
12
g
la A
方向如图所示。
B
F Ie C
O
F
t Ir
M IC
q
A aA
21
第二十章 惯性力
再向O点简化, 主矢不变
P F IR g a C
M I O r i ( m i a i ) (m i r i ) a C m r C a C
若选质心C为简化中心,则 rC=0,有: MIC 0
故平移刚体的惯性力系可以简化
为通过质心的合力,其力大小等
于刚体质量与加速度的乘积,合
力的方向与加速度方向相反。
12
第二十章 惯性力
2、定轴转动刚体 如图示定轴转动刚体,考 虑质点i,以O为简化中。 有
29
第二十章 惯性力
由前面所得,即有
F Ix mC a x0, F Iy mC a y0
置静止落下。求开始落下时杆AB的角加速度及A点支座反力。
解: 选杆AB为研究对象
虚加惯性力系:
FIt
ml
2
F Inmna 0,M IAJA m 3 2l
转动惯量和力矩

2
r
p
L
m o r
转动惯量
J m r , J r dm
2 j j 2 j
物理意义:转动惯性的量度 .
转动惯性的计算方法
质量离散分布刚体的转惯量
2 j j 2 11 j
J m r m r m r
2 2 2
M z k r F M z rF sin
O
r
F
2)合力矩等于各分力矩的矢量和
M M1 M 2 M 3
3) 刚体内作用力和反作用力的力矩互相抵消
M ij
O
M ji
d
ri
F ji i F
ij
rj
j
Mij M ji
2 j j 2
质量连续分布刚体的转动惯量
J m r r dm
j
dm
:质量元
质量连续分布刚体的转动惯量
J m r r dm
2 j j 2 j
dm
:质量元
对质量线分布的刚体: dm
dl
:质量线密度
对质量面分布的刚体: dm
:质量面密度
:质量体密度
质点的角动量
在空间运动,某时刻相对原点 O 的位矢为 r,质点相对于原 点的角动量
质量为 m 的质点以速度 v
L
x
z
r
o
L r p r mv 大小 L rmv sin
m y
v
L
v
为 r 的圆运动,相对圆心的 角动量
L 的方向符合右手法则. 质点以角速度 作半径
转动惯量

转动惯量的定义
转动惯量:Moment of Inertia 刚体绕轴转动惯性的度量。
转动惯量描述转动中的惯性大小,相当于质点动力学中的质量;又称惯性距、惯性矩(俗称惯性力距、惯性力矩)。
可以反映出物体平动状态下的惯性:质量越大,则惯性越大,即越难改变它的平动状态(同样从静止开始,质量大的物体比质量小的物体更难于被加速)。
同样,转动惯量反映出物体转动状态下的惯性:转动惯量大的物体的角速度更难于被改变。
当然,转动惯量与质量也有很大不同:转动惯量不仅与质量分布有关,也与转轴的位置有关,也就是说,转动惯量的要求更多一些。
其数值为J=∑ mi*ri^2,式中mi表示刚体的某个质点的质量,ri表示该质点到转轴的垂直距离。
通常以 I 表示,SI 单位为 kg * m2,可说是一个物体对于旋转运动的惯性。
对于一个质点,I = mr2,其中m 是其质量,r 是质点和转轴的垂直距离。
在SI单位制中,它的单位是kg·m^2。
求和号(或积分号)遍及整个刚体。
转动惯量只决定于刚体的形状、质量分布和转轴的位置,而同刚体绕轴的转动状态(如角速度的大小)无关。
规则形状的均质刚体,其转动惯量可直接计得。
不规则刚体或非均质刚体的转动惯量,一般用实验法测定。
转动惯量应用于刚体各种运动的动力学计算中。
物理概念角动量与力矩
物理概念角动量与力矩物理概念:角动量与力矩角动量和力矩是物理学中重要的概念,在描述物体运动和力学性质时起着关键作用。
本文将详细介绍角动量和力矩的定义、计算方法以及在实际问题中的应用。
一、角动量的概念与计算方法角动量是描述物体绕某一轴旋转的性质,它与物体的质量、几何形状和旋转速度等因素有关。
角动量的定义如下:角动量L = Iω其中,L表示角动量,I代表物体的转动惯量,ω表示物体的角速度。
转动惯量是物体旋转惯性的度量,它与物体的质量分布和绕轴旋转的位置有关。
计算角动量的方法有两种常见的形式:数量积和矢量积。
1. 数量积方式计算角动量当物体的旋转轴与角速度方向相同时,可以用数量积方式计算角动量。
此时,角动量的计算公式为:L = Iω2. 矢量积方式计算角动量当物体的旋转轴与角速度方向不重合时,需要使用矢量积方式计算角动量。
此时,角动量的计算公式为:L = Iωn其中,n为物体旋转轴与角速度的法向量。
二、力矩的概念与计算方法力矩是描述物体受力产生转动效果的物理量。
当物体受力作用于某一点时,力就产生了力矩。
力矩的定义如下:力矩 M = r × F其中,M表示力矩,r表示力作用点到旋转轴的距离,F表示力的大小。
力矩的方向由右手定则给出,即拇指指向旋转轴,其余四指指向力的方向,手掌垂直于旋转平面内。
计算力矩的方法有两种常见的形式:数量积和矢量积。
1. 数数量积方式计算力矩当力和力臂的方向相同或者反向时,可以用数量积方式计算力矩。
此时,力矩的计算公式为:M = rF2. 矢量积方式计算力矩当力和力臂的方向不重合时,需要使用矢量积方式计算力矩。
此时,力矩的计算公式为:M = r × F三、角动量与力矩的关系与应用角动量和力矩是密切相关的物理量,它们之间存在如下关系:L = r × p其中,L表示角动量,r表示物体到旋转轴的距离,p表示物体的动量。
这一关系表明,角动量和力矩可以通过动量和物体到旋转轴的距离相互转化。
力学 力矩-概述说明以及解释

力学力矩-概述说明以及解释1.引言1.1 概述力学是研究物体在受力作用下的运动和静止状态的学科,而力矩则是力学中的一个重要概念。
力矩可以理解为力对物体产生转动效果的力量,是描述物体旋转运动的物理量。
通过力矩的计算和分析,可以更深入地理解物体的平衡状态和运动规律。
本文将首先介绍力学基础的定义和原理,包括牛顿的运动定律,以及力的概念和相关公式。
接着将详细探讨力矩的概念,包括力矩的定义、计算方法以及在实际问题中的应用。
最后,将讨论力矩的平衡条件,介绍如何通过平衡条件方程来分析物体的平衡状态,并通过实例来加深理解。
通过本文的阐述,读者将更加深入地理解力学与力矩的关系,为进一步学习和研究力学提供基础和指导。
同时,本文也将展望未来力学研究的发展方向,为读者提供对未来研究方向的启示和思考。
1.2 文章结构本文将分为三个主要部分:引言、正文和结论。
在引言部分,我们将对力学和力矩的基本概念进行简要介绍,说明本文的目的和结构。
在正文部分,我们将详细讨论力学的基础知识,包括力学基础和力矩概念。
我们将深入探讨力矩的定义、计算方法以及应用场景,并介绍力矩平衡条件的概念和具体应用。
最后,在结论部分,我们将对全文进行总结,强调力学与力矩的重要性和联系,并展望未来力学领域的发展方向。
整篇文章将帮助读者全面了解力学和力矩的基本原理和应用,为进一步学习和研究提供基础知识和参考资料。
1.3 目的力学是研究物体运动和静止状态下的力的学科,而力矩则是力的产生的旋转效果。
本文的目的是通过深入探讨力学和力矩的概念、原理和应用,帮助读者更好地理解力学定律和力矩的作用。
我们希望读者能够通过本文的阅读,掌握力学的基础知识,理解力矩的概念和计算方法,并能够灵活运用力矩平衡条件解决实际问题。
同时,我们也希望通过本文的介绍,加深对力学和力矩的认识,增强读者对物体运动和平衡状态的理解,为进一步学习和应用力学知识打下坚实的基础。
2.正文2.1 力学基础2.1.1 定义和原理力学是物理学的一个重要分支,研究物体之间的相互作用和运动规律。
材料力学 截面的几何性质
1、矩形截面 h
Iz
y2dA
A
2 h
y 2bdy
h
2
dy y
b y 3 2 1 bh3 3 h 12
2
同理
Iy
z2dA 1
A
12
hb3
b h z
y
26
2、实心圆截面
y
已知
IP
A2dA
D 4 32
D
z
则 I P A2 d A A y 2 d A A z 2 d I A z I y
A
Iz Iy
此式说明了极惯性矩与轴惯性矩之间的关系。
z
y
o
A dA
z
y
惯性积
定义
Iyz
yzdA
A
z y
A dA
为图形对y、z轴的惯性积 。
z
o
y
惯性积的数值可正,可负,也可为零。惯性积的量纲是[长 度]4 ,常用单位为m4和mm4。
定理:若有一个轴是图形的对称轴,则图形对这对轴 的惯性积必然为零。
4.3 形心主惯性轴和形心主惯性矩
若主惯性轴通过形心,则该轴称为形心主惯性轴(principal centroidal axis)。
图形对形心主惯性轴的惯性矩称为形心主惯性矩。 由于图形对于对称轴的惯性积等于零,而对称轴又过形心,所以,图形 的对称轴就是形心主惯性轴。
形心主惯性轴的特点可归纳为以下几点: ⑴形心主惯性轴是通过形心,由角定向的一对互 相垂直的坐标轴。
32
32
圆环形对y(或z)轴的惯性矩为
IyIz1 2Ip6 D4414
由于y轴为对称轴,故
Iyz 0
z
y
d D
爱普生C4系列机器人惯性计算
C4 Rev.8
37
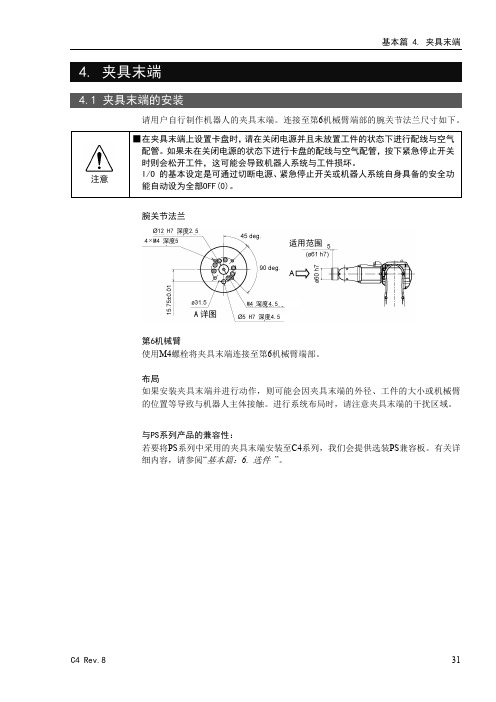
基本篇 4. 夹具末端
使用以下公式计算Weight参数并输入数值。
Weight参数公式 Weight参数 = Mw + Wa + Wb Mw :第6机械臂前端安装的负载重量(kg) Wa :第3机械臂挡板的等效重量(kg) Wb :第5机械臂挡板的等效重量(kg)
Wa = Ma (La)²/ (L)² Wb = Mb (Lb)²/ (L)²
允许负载
机械臂
允许力矩*1
GD2/4允许的惯性力矩
#4
4.41 N·m (0.45 kgf·m)
0.15 kg·m2
#5 *2
4.41 N·m (0.45 kgf·m)
0.15 kg·m2
#6
2.94 N·m (0.3 kgf·m)
0.1 kg·m2
*1 扭矩单位
*2 第5机械臂允许负载的计算如下: 与第5机械臂旋转中心的距离(图:a + 65 [mm])。
34
C4 Rev.8
负载的临界尺寸 负载重心 的位置
基本篇 4. 夹具末端
第 J6 机 械臂旋转 中心
法兰 第 J5 机械臂旋转中心
[单位:mm]
与第 J6 机械臂旋转中心的距
与法兰的距离
使用允许的力矩和惯性力矩计算第5机械臂的负载临界尺寸时,计算值代表与第5机 械旋转中心之间的距离,而不是与法兰之间的距离。因此,要获得第5机械臂负载的 临界尺寸值,需从下例所示计算的距离中减掉 65 (mm)。
截面惯性矩和截面抵抗矩
截面惯性矩和截面抵抗矩
梁的截面惯性矩和截面抗矩是有力学原理由力学原理计算得出,对于工程计算和设计十分重要。
截面惯性矩是指梁截面在任意方向和平面围绕其中心点,旋转一周所产生的力矩;而抗矩则
来源于求取梁截面在一起受力时所抵抗偏转作用的力矩。
简言之,截面惯性矩和抗矩表示了梁所能承受的偏转能力有多大。
梁的截面惯性矩计算时,需根据所使用的梁截面的几何形状不同,综合考虑其面积、外接图形的面积以及距离质心的距离大小等因素,综合计算所得结果是根据梁的几何形状所得的结果逐步的减小的。
抗矩的计算与计算惯性矩相同,也需要根据梁截面的形状来计算,不过抗矩采用的是恒压梁横向剖面质心与中心线距离来计算,这是因为梁蒙受的外力及其作用的方向改变时,偏转力也会改变,因此梁的抗矩会发生变化。
总的来说,梁的截面惯性矩和抗矩是非常重要的参数,在工程设计和分析中起着举足轻重的作用。
精确计算梁截面惯性矩及抗矩有助于更加准确地分析梁的偏转能力,从而降低设计梁容易出现破坏情况。