09年10月自动控制理论(二)试题
自动控制理论第二章习题答案
式中 K 为比例常数, P 为阀门前后的压差。若流量 Q 与压差 P 在其平衡点 (Q0 , P0 ) 附近作微小变化,试导出线性化
方程。 解:
设正常工作点为 A,这时 Q0 = K P0
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 Q − Q0 = K1 (P − P0 )
其中 K1
= dQ dP P=P0
=
1K 2
1 P0
2-7 设弹簧特性由下式描述:
F = 12.65 y1.1
其中,是弹簧力;是变形位移。若弹簧在变形位移附近作微小变化,试推导的线性化方程。 解:
设正常工作点为 A,这时 F0
=
12.65
y1.1 0
在该点附近用泰勒级数展开近似为:
2-3 试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
2
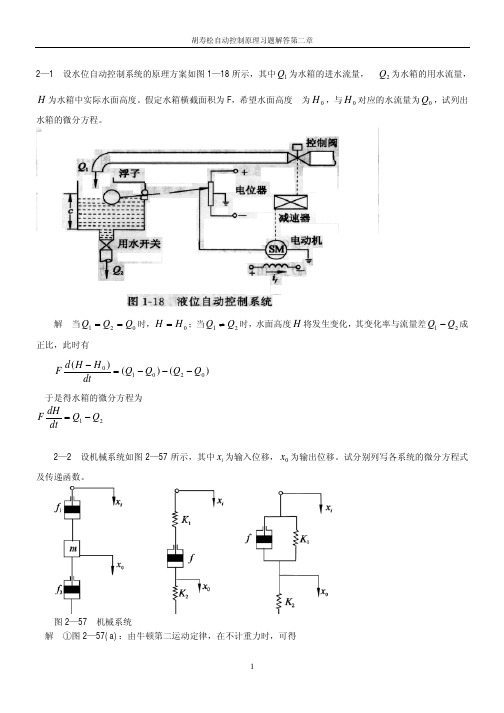
胡寿松自动控制原理习题解答第二章
图 2-58 电网络与机械系统
1
解:(a):利用运算阻抗法得: Z1
=
R1
//
1 C1s
=
R1 C1s
R1
+
1 C1s
=
R1 = R1 R1C1s + 1 T1s + 1
Z2
=
R2
+
1 C2s
(C2
+
2C1 )
du0 dt
+ u0 R
=
C1C2 R
d 2ui dt 2
(完整版)自动控制原理试题及答案
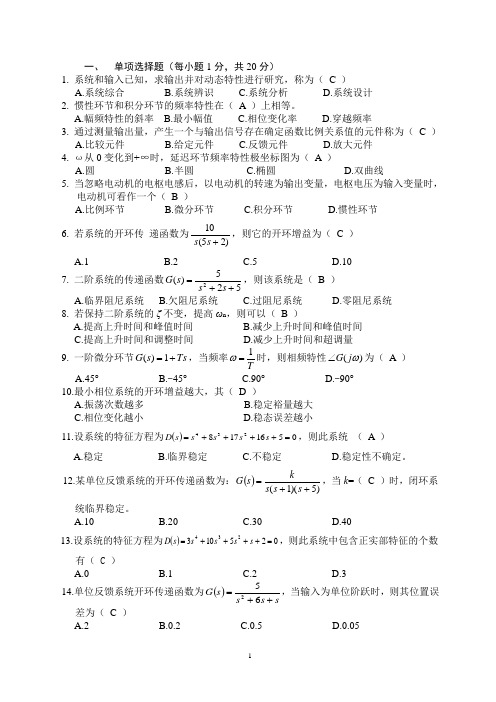
一、 单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为( C )A.系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在( A )上相等。
A.幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( C )A.比较元件B.给定元件C.反馈元件D.放大元件4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( A )A.圆B.半圆C.椭圆D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A.比例环节B.微分环节C.积分环节D.惯性环节6. 若系统的开环传 递函数为2)(5 10+s s ,则它的开环增益为( C ) A.1 B.2 C.5 D.107. 二阶系统的传递函数52 5)(2++=s s s G ,则该系统是( B ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统8. 若保持二阶系统的ζ不变,提高ωn ,则可以( B )A.提高上升时间和峰值时间B.减少上升时间和峰值时间C.提高上升时间和调整时间D.减少上升时间和超调量9. 一阶微分环节Ts s G +=1)(,当频率T1=ω时,则相频特性)(ωj G ∠为( A ) A.45° B.-45° C.90° D.-90°10.最小相位系统的开环增益越大,其( D )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( A )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s k s G ,当k =( C )时,闭环系统临界稳定。
2009-2010学年第二学期《现代控制理论》考试题A卷_参考答案

2e−t =2e−2t
− e−2t − 2e−t
e−t − e−2t 1
2e−2t
− e−t
1
t 2e−(t −τ ) − e−2(t −τ )
∫+ 0 2e−(t−τ ) − 2e−2(t−τ )
e−(t −τ ) 2e−2(t −τ
−e )−
−2(t −τ )
0 1 0 0
x =−2 −3
0
x
+
1
u,
y =[1 0 1] x
−1 1 −3 2
Please draw the state structure diagram and calculate the transfer function.
解:(1)画模拟结构图的步骤:
= [1
0
1]
(s
+ 1)( s
1 +
2)(s
+
3)
−2(s + 3) −s − 5
s(s + 3) s −1
0
1
s(s + 3) + 2 2
= = 2s2 + 8s + 6 2 (s +1)(s + 2)(s + 3) s + 2
三、(10 分)已知差分方程为:
长安大学 2009-2010 学年第 2 学期 试题( A )卷 现代控制理论基础标准答案及评分标准
一、(10 分)已知系统的传递函数:
W (s) = 10(s −1) s(s +1)(s + 3)
求出系统的约旦标准型实现(并联分解法)。
解: G(s)= 10(s −1) = −10 3 + 10 + − 20 3 s(s +1)(s + 3) s s +1 s + 3
09年东北大学真题控制理论与控制工程

一、(10分)试画出人从书架上取书的负反馈控制系统方框图,并简述其工作过程。
二、(20分)试简化图一所示的系统结构图,并求传递函数C(S)/R(S)。
图一。
题二系统结构图
三、(20分)
(1)给出二阶工程最佳系统的单位阶跃响应动态性能指标;
(2)为了改善图二所示系统的动态响应性能,满足单位阶跃输入下系统超调量σ%<=5%,
ξ=0.707的要求,今加入微分负反馈,如图3所示,求微分时间常数
图二。
题三原系统结构图
图三。
题三改善后系统结构图
四、(20分)已知单位负反馈系统的开环传递函数为:
试画出根轨迹草图,并用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5时Kg值。
五、(20分)已知系统的开环传递函数为:
试绘制伯德图,求出相位裕度及增益裕度,并判断闭环系统的稳定性。
六、(20分)试写出串联引前(微分)校正装置的传递函数,并说明其作用和适用范围。
七、(20分)
(1)试说明用描述函数法分析非线性系统的基本思想;
(2)设继电器特性为:
试计算非线性特性的描述函数。
八、(20分)已知系统的动态结构图如图4所示,求系统的单位阶跃响应(图中取K=1,采样时间T=1S)。
图4.题八系统结构图。
北航2009年933自动控制原理试题
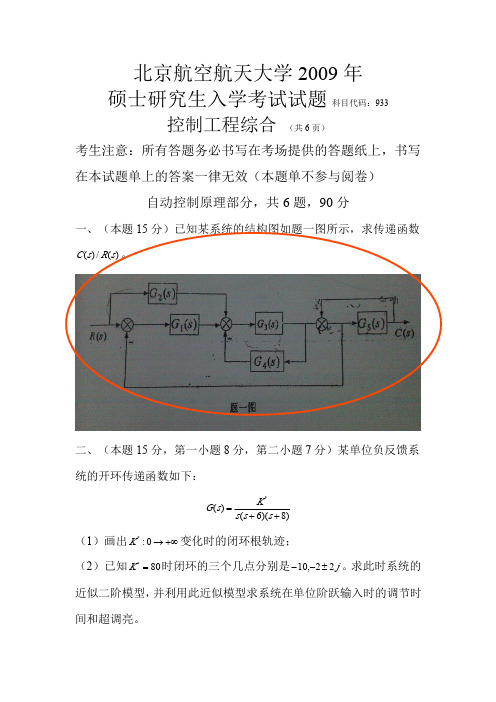
北京航空航天大学2009年硕士研究生入学考试试题科目代码:933控制工程综合(共6页)考生注意:所有答题务必书写在考场提供的答题纸上,书写在本试题单上的答案一律无效(本题单不参与阅卷)自动控制原理部分,共6题,90分一、(本题15分)已知某系统的结构图如题一图所示,求传递函数)(/)(s R s C 。
二、(本题15分,第一小题8分,第二小题7分)某单位负反馈系统的开环传递函数如下:)8)(6()(*++=s s s K s G (1)画出+∞→0:*K 变化时的闭环根轨迹;(2)已知80*=K 时闭环的三个几点分别是j 22,10±−−。
求此时系统的近似二阶模型,并利用此近似模型求系统在单位阶跃输入时的调节时间和超调亮。
三、(本题15分,第一小题9分,第二小题6分)已知某单位负反馈系统开环对数幅频渐进特性曲线如题三所示,且已知该开环系统是最小相位的。
(1)求该系统的开环传递函数;(2)画开环Nyquist 曲线,并利用Nyquist 判据判断系统闭环稳定性。
四、(本题15分)设某非线性系统如题四图所示,求起点在2)0(=C ,0)0(*=C 的相轨迹方程,画相轨迹图,并计算相轨迹的周期。
五、(本题15分,每小题5分)某系统结构如题五所示:(1)根据题五图所给出的系统状态321,,x x x ,求该系统的动态方程(状态方程和输出方程);(2)根据(1)所求出的动态方程,判断系统的可控性和可观测性;(3)求该系统的矩阵指数At e 。
六、(本题15分,第一小题9分,第二小题6分)某被控对象的动态方程如下:[]x y u x x 10,010122.=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=(1)设计状态反馈向量k ,使得经窗台反馈r kx u +=后,闭环系统在输入0)0(),(1==x t r 时响应的超调量为16.3%、过渡过程时间为7秒(取5%误差带);(2)设0)0(=x ,求经上述状态反馈后闭环系统在输入信号)(1t r =作用下响应)(t y 的表达式。
自动控制理论试题 答案及评分标准.docx
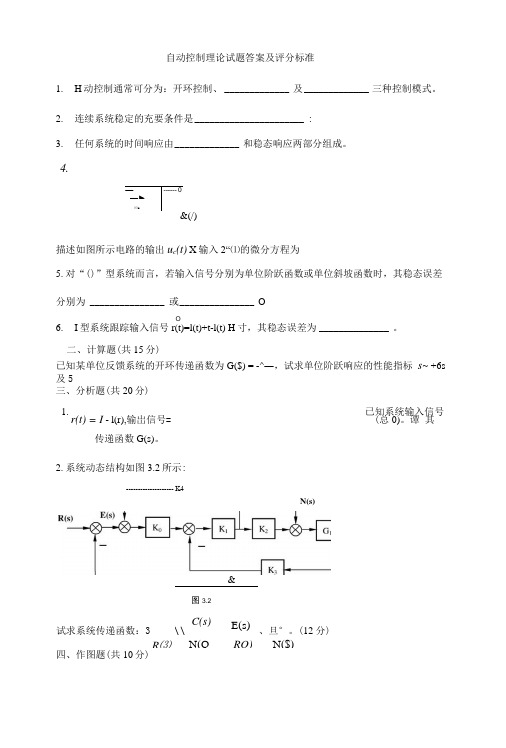
自动控制理论试题答案及评分标准1. H 动控制通常可分为:开环控制、 _____________ 及 _____________ 三种控制模式。
2. 连续系统稳定的充要条件是 ______________________ :3. 任何系统的时间响应由 _____________ 和稳态响应两部分组成。
描述如图所示电路的输出u c (t) X 输入2“⑴的微分方程为5. 对“()”型系统而言,若输入信号分别为单位阶跃函数或单位斜坡函数时,其稳态误差 分别为 _______________ 或 _______________ O6. I 型系统跟踪输入信号r(t)=l(t)+t-l(t) H 寸,其稳态误差为 ______________ 。
二、计算题(共15分)已知某单位反馈系统的开环传递函数为G($) = -^―,试求单位阶跃响应的性能指标 s~ +6s 及5三、分析题(共20分)1. 已知系统输入信号r(t) = I - l(r),输岀信号=(总0)。
谭 其传递函数G(s)。
2. 系统动态结构如图3.2所示:-------------------- K4& 图3.2试求系统传递函数:3C(s) \ \ E(s) 、旦°。
(12 分) R ⑶ N(Q RO) N($)四、作图题(共10分) — —►------ 0 ⑹■O4.&(/)N(s)负反馈系统的开环传递函数:G(s)H(s) =s (s + \y试在图4上作开环增益K (由0->oo)变动下系统的根轨迹,并确定保证系统闭环稳定五、分析题(共15分2.该系统的模稳定裕度力是多少?一、填空题1 •闭环控制; 复合控制。
2.全部特征根应具有负实部。
3•瞬态响应。
单位负反馈系统校正示的开环对数渐近幅频曲线如图6所示:1.确定其开环传递函4-眈电①+冷⑴+卫)。
at5.常值;无限大。
R(s) = 4 S 2. (12 分) C(s) ____________ K Q K y K 2G l丽 一(1 +心匚心+ KA2K3G1 +心匕心心6|)E(s)二 ________ l + KoKK + KKS ____________丽 一(1 + 心匚心 + (心"| + K0KKK5GJC(s)二 C(s) 1 + 心(心N(s)~~R(^) K {)K }K 2= _____________ K Q K\K2G\ _____________ 1 + KoKK一(1 + K°K\K« + 心心《2| + K0KA2K5GJ K ()K|K?E($)二 C(s)二 C($) 1 + 心心心N(s) ~ 一 N($) - ~~R^) K {}K {K 2______________ K O K'K Q G 、 ____________ 1 + KoKK一 一 (1 + K ()K\K4 + 乞心心& + K0KA2K5GJ 心匕心四个传递函数分母必须相同,如不同,则扣6分。
自动控制理论2010试卷2
(A)卷2009~2010学年第Ⅱ学期班级:姓名:学号:
…………………………………装……………………………订…………………………线………….………………………………
适用专业
考核性质
命题教师
彭丽芳
考试时间
100分钟
题号
一
二
三
四
五
六
七
八
九
十
十一
总分
得分
评阅人
复核人
一.(本题10分)系统的动态方框图如题图一所示,求系统的传递函数 。
图一
二.(本题15分)典型二阶系统的单位阶跃响应曲线如图二所示,试确定系统的闭环传递函数。
图二
三.(本题15分)单位负反馈系统的开环传递函数为
a)试确定使系统稳定的开环增益 、阻尼比 的范围。
b)若 ,并保证系统的极点全部位于 的左侧,试确定此时的开环增益 的范围。
共3页第1页
山东理工大学《自动控制原理》试卷纸
图四
七.(本题15分)系统不可变部分的传递函数为:
要求满足性能指标:
(1)系统型别
(2)开环增益
(3)剪切频率
(4)相角裕度
试确定合适的校正环节
共3页第3页
(A)卷2009~2010学年第Ⅱ学期班级:姓名:学号:
…………………………………装……………………………订…………………………线………….………………………………
四.(本题15分)已知比 、固有频率 和单位斜坡输入时系统的稳态误差。
b)若使 ,单位斜坡输入下系统的稳态误差 ,试确定系统中 的值,此时放大系数 应为何值。
五.(本题15分)某单位负反馈系统的开环传递函数为:
10月全国自动控制理论(二)自考试题及答案解析
1全国2019年10月高等教育自学考试自动控制理论(二)试题课程代码:02306一、单项选择题(在每小题的四个备选答案中,选出一个正确答案,并将正确答案的序号填在题干的括号内。
第1—10小题每小题1分,11—15小题每小题2分,共20分)1.控制系统的上升时间t r 、调整时间t S 等反映出系统的( )A.相对稳定性B.绝对稳定性C.快速性D.平稳性2.2型系统对数幅频特性的低频段渐近线斜率为( )A.-60(dB/dec)B.-40(dB/dec)C.-20(dB/dec)D.0(dB/dec)3.下列频域性能指标中,反映闭环频域性能指标的是( )A.谐振峰值M rB.相位裕量γC.增益裕量K gD.剪切频率ωc4.在经典控制理论中,临界稳定被认为是( )A.稳定B.BIBO 稳定C.渐近稳定D.不稳定5.确定根轨迹大致走向,用以下哪个条件一般就够了?( )A.特征方程B.幅角条件C.幅值条件D.幅值条件+幅角条件6.滞后—超前校正装置的奈氏曲线为( )A.圆B.上半圆C.下半圆D.45°弧线7.设系统的状态方程中系数矩阵A=⎥⎦⎤⎢⎣⎡--1012,则其特征根为( ) A.S 1=-2,S 2=-1 B.S 1=-2,S 2=1C.S 1=2,S 2=-1D.S 1=2,S 2=18.设有一单位反馈控制系统,其开环传递函数为G 0(s)=2)s(s 40+,若要求相位裕量≥50°,最为合适的选择是采用( )A.滞后校正B.超前校正C.滞后-超前校正D.超前-滞后校正9.根轨迹渐近线与实轴的交点公式为( )2 A.m n Z P m 1i in 1j j ++∑∑== B. n m Z P m 1i i n 1j j --∑∑== C. m n P Z n 1j j m 1i i --∑∑== D. m n Z P m 1i i n 1j j --∑∑==10.对复杂的信号流图直接求出系统的传递函数可以采用( )A.终值定理B.初值定理C.梅森公式D.方框图变换11.一般讲,如果开环系统增加积分环节,则其闭环系统的相对稳定性将( )A.变好B.变坏C.不变D.不定12.由基本功能组件并联成的PID 控制器,其三种控制作用( )A.可以各自独立整定B.不能独立整定C.只有积分,微分时间可独立整定D.只有比例增益可独立整定13.设开环系统频率特性G(j ω)=3)j (110ω+,则其频率特性相位移θ(ω)=-180°时对应频率ω为( )A.1(rad/s)B.3(rad/s)C.3(rad/s)D.10(rad/s)14.已知单位反馈系统的开环传递函数为G(s)=1)s(Ts K +,若要求带宽增加a 倍,相位裕量保持不变,则K 应变为( ) A.a3K B.a K C.aK D.2aK15.设系统u 10X 1001X ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=•,Y=[1 0]X,则( ) A.状态可控且可观 B.状态可控但不可观C.状态不可控但可观D.状态不可控且不可观二、填空题(每小题1分,共10分)16.线性控制系统的特点是可以使用__________原理。
自动控制理论_习题集(含答案)
A. 对称于实轴B. 对称于虚轴C. 位于左半[s]平面D. 位于右半[s]平面 13. 系统的开环传递函数)4)(2()3)(1()(*0++++=s s s s s K s G ,则全根轨迹的分支数是( C )。
A .1B .2C .3D .414. 已知控制系统的闭环传递函数是)()(1)()(s H s G s G s G c +=,则其根轨迹起始于( A )。
A . G(s)H(s)的极点 B . G(s)H(s)的零点 C . 1+ G(s)H(s)的极点D . 1+ G(s)H(s)的零点15. 系统的闭环传递函数是)()(1)()(s H s G s G s G c +=,根轨迹终止于( B )。
A . G(s)H(s)的极点B . G(s)H(s)的零点C . 1+ G(s)H(s)的极点D . 1+ G(s)H(s)的零点线16. 在设计系统时应使系统幅频特性L(ω)穿越0dB 线的斜率为( A )。
A .-20dB/decB .-40dB/decC .-60dB/decD .-80dB/dec17. 当ω 从−∞ → +∞ 变化时惯性环节的极坐标图为一个( B )。
A .位于第一象限的半圆B .位于第四象限的半圆C .整圆D .不规则曲线18. 设系统的开环幅相频率特性下图所示(P 为开环传递函数右半s平面的极点数),其中闭环系统稳定的是( A )。
A. 图(a)B. 图(b)C. 图(c)D. 图(d)19. 已知开环系统传递函数为)1(10)()(+=s s s H s G ,则系统的相角裕度为( C )。
A .10°B .30°C .45°D .60°20. 某最小相位系统的开环对数幅频特性曲线如下图所示。
则该系统的开环传递函数为( D )。
20-20 ωL(dB) 10(a) p=1 (b) p=1 (c) p=1 (d) p=1由图知存在自振。
自动控制原理期中试卷参考答案(09级)
09级自动控制原理期中试卷参考答案一、求图1所示无源网络的运动方程和传递函数,图中电压1()u t 和2()u t 分别为输入量和输出量。
(10分)()t图1 题一图解:设电阻R 1上电流为i 1,电容C 上的电流为i 2,则电阻R 2上的电流i=i 1+i 2。
由图得:1122221211121()R i i dt C u R i R i i u R i u⎧=⎪⎪==+⎨⎪=+⎪⎩⎰ 于是1211u u i R -=, 1122111()1di d u u i R C R C dt R dt-== 从而1212222111()1u u d u u u R i R R C R R dt ⎡⎤--==+⎢⎥⎣⎦整理,由上述方程组可得无源网络的运动方程为:21121221221()du duR R CR R u R R C R u dt dt++=+ 对上述方程中各项求拉氏变换得:12212212121()()()()()R R CsU s R R U s R R CsU s R U s ++=+所以,无源网络的传递函数为:22111212()(1)()()()U s R R Cs G s U s R R Cs R R +==++二、用结构图简化方法或信号流图法求图2所示闭环传递函数()()C s R s 。
(10分)图2 题二图解:132121()()()1G G G C s R s G G H +=+ 或解:11211L G G H ∆=-=+∑1121(1),11P G G L =∆=+= ,2322(1),11PG G L =∆=+= 1223112212()()1G G G G P P C s P R s G G H+∆+∆===∆+三、在零初始条件下,系统在单位阶跃输入()1()r t t =的输出响应为2()1t t c t e e --=-+,试求系统的传递函数和脉冲响应。
(10分) 解:()1()r t t =,1()R s s=2()1ttc t ee --=-+, 211142()21(1)(2)s s C s s s s s s s ++=-+=++++系统的传递函数:2()42()(1)(2)C s s s R s s s ++=++ 于是,系统的脉冲响应为:21112()4212()1()(1)(2)12 ()2 (0)t t C s s s g t L L L R s s s s s t e e t δ-----⎡⎤⎡⎤++⎡⎤===-+⎢⎥⎢⎥⎢⎥++++⎣⎦⎣⎦⎣⎦=-+≥四、单位负反馈系统的开环传递函数为10()(0.11)(0.51)o G s s s s =++。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全国2009年10月高等教育自学考试
自动控制理论(二)试题
课程代码:02306
一、单项选择题(本大题共15小题,每小题2分,共30分)
在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。错选、多选或未
选均无分。
1.单位阶跃函数r(t)的定义是( )
A.r(t)=1 B.r(t)=1(t)
C.r(t) =Δ(t) D.r(t)=(t)
2.设惯性环节的频率特性1101)(jjG,则其对数幅频渐近特性的转角频率为( )
A.0.01rad/s B.0.1rad/s
C.1rad/s D.10rad/s
3.迟延环节的频率特性为jejG)(,其幅频特性M()=( )
A.1 B.2
C.3 D.4
4.计算根轨迹渐近线的倾角的公式为( )
A.mnl)12( B. mnl)12(
C. mnl)12( D. mnl)12(
5.已知开环传递函数为)1()3()(sssksGk的单位负反馈控制系统,若系统稳定,k的范围应为( )
A.k<0 B.k>0
C.k<1 D.k>1
6.某闭环控制系统的单位脉冲响应函数为一非零的常数,则该闭环系统是( )
A.稳定的 B.有界输入输出稳定的
C.渐近稳定的 D.不稳定的
7.设二阶系统的4394)(2sssG,则系统的阻尼比和自然振荡频率n为( )
A.2191、 B. 3241、
C. 9231、 D. 4121、
8.一阶系统11)(TssG的单位斜坡响应y(t)=( )
A.1-e-t/T B.T1e-t/T
C.t-T+Te-t/T D.e-t/T
9.根轨迹与虚轴交点处满足( )
A.0)()(jHjG B. 0)]()(Re[jHjG
C. 1)()(jHjG D. 0)]()(Im[jHjG
10.开环传递函数为)(4pss,讨论p从0变到∞时闭环根轨迹,可将开环传递函数化为( )
A.42sps B. 42sp
C. 42sps D. 42sp
11.若系统的状态方程为
uxx
1032
38
,则该系统的特征根为( )
A.s1=-8,s2=-3 B.s1=-5,s2=-6
C.s1=-2,s2=-6 D.s1=6,s2=2
12.对于一个比例环节,当其输入信号是一个阶跃函数时,其输出是( )
A.同幅值的阶跃函数 B.与输入信号幅值成比例的阶跃函数
C.同幅值的正弦函数 D.不同幅值的正弦函数
13.晶闸管整流电路的输出电压取决于( )
A.输入电压 B.导通角
C.输入电压及导通角 D.晶闸管
14.若串联滞后校正装置的零极点靠得很近,则校正装置传递函数Gc(s)≈( )
A.)1(1 B. )1(
C. )1(1 D. )1(11
15.设计一单位反馈控制系统,其开环传递函数为)15.0)(1(sssk,要求kv=5,求得k=( )
A.1 B.2
C.4 D.5
二、填空题(本大题共10小题,每小题1分,共10分)
请在每小题的空格中填上正确答案。错填、不填均无分。
16.某闭环控制系统的特征多项式的系数全部为正时,该系统________稳定。
17.奈奎斯特稳定判据是利用开环系统的________来判别闭环控制系统稳定性的。
18.若开环传递函数为)25.0()35.0)(15.0(ssssk,则其根轨迹的终点为________。
19.对于动态性能及稳态性能都有要求的控制系统,为使其全面满足性能指标,必须设法改变系统的结构,或引入其
他装置来改变控制系统的特性,这些附加装置称为________。
20.状态空间是以各________为基底所组成的n维向量空间。
21.设二阶振荡环节的频率特性为1)(2)(1)(22jTjTjG,当时,则相应的相频特性
)(
________。
22.设微分环节的频率特性为jjG)(,当频率从0变化到时,其极坐标图是整个________轴。
23.欠阻尼二阶系统的主要结构参数和n中,当一定时,n越大,则上升时间tr________。
24.余弦函数tcos的拉氏变换为________。
25.根据控制系统信号的形式,连续控制系统又常称为________控制系统。
三、名词解释题(本大题共4小题,每小题3分,共12分)
26.离散控制系统
27.最大超调量p
28.无限零点
29.数学模型
四、简答题(本大题共4小题,每小题5分,共20分)
30.电热油汀的温度控制为何种控制系统?为什么?
31.试说明标准二阶系统的闭环频域指标谐振峰值Mr和超调量p、调整时间ts间的关系。对控制系统来讲,Mr的
取值范围为多少比较合适?
32.在何种情况下根轨迹没有出射角?
33.已知线性定常连续系统
21321111112310020231uuxxxx
,该系统是否具有可控性?
五、计算题(本大题共3小题,第34、35小题各10分,第36小题8分,共28分)
34.系统方框图如题34图所示。简化方框图并求出系统的传递函数C(s)/R(s)。
35.设系统的开环传递函数为)105.0)(12.0(5)(ssssG
(1)试写出开环系统的幅频特性M()和相频特性)(;
(2)确定相频特性)(=-180°对应的频率值g。
36.设一控制系统的动态过程用微分方程表示为:
uuyyy489
试求该控制系统的状态空间描述。