六足机器人简介ppt课件
六足机器人原理

六足机器人原理今天咱们来聊聊超级酷的六足机器人的原理,这就像是探秘一个来自未来的小怪兽的秘密呢。
六足机器人啊,就像一个六条腿的小机灵鬼。
它的最基本原理其实和生物界里的昆虫有点像哦。
你看那些小昆虫,六条腿走来走去可灵活啦。
六足机器人也是想模仿这种灵活性。
从结构上来说,它有六条机械腿,这六条腿可是各有各的本事。
每一条腿都像是一个独立的小单元,它们都能做不同的动作。
这些腿和机器人的身体连接的地方就像是关节,就跟我们人的关节一样,可以弯曲、伸直。
这个关节的设计可重要啦,它能让腿做出各种各样的姿势。
比如说,有的关节是可以上下摆动的,就像我们膝盖一样,这样腿就能抬起来或者放下去;还有的关节能左右转动,就像我们的脚踝,能让机器人的脚调整方向。
那这些腿怎么动起来的呢?这就涉及到动力系统啦。
一般来说,会有电机来提供动力。
电机就像是小机器人的肌肉,它一转起来,就能带动腿的关节活动。
想象一下,电机就像一个勤劳的小工,不停地转动,然后把力量传递给关节,关节再带动腿做出各种动作。
不过呢,这个动力的传递可不是随随便便的,它需要一些特殊的装置,比如说齿轮或者皮带。
这些东西就像是小信使,把电机的力量准确无误地送到关节那里。
再说说六足机器人的平衡原理吧。
这可是它能稳稳站着和行走的关键呢。
你想啊,如果六条腿乱动,那机器人肯定就东倒西歪了。
它是怎么保持平衡的呢?其实它内部有一个很聪明的控制系统。
这个系统就像是机器人的小脑袋,它能时刻感知到每条腿的位置和受力情况。
如果有一条腿抬起来了,这个小脑袋就会迅速计算,然后让其他的腿调整位置和力量,来保持整个身体的平衡。
就像我们人走路的时候,当我们抬起一只脚,身体会自动调整重心到另外一只脚和两只脚上,机器人也是这样的道理。
而且哦,六足机器人的行走方式也是多种多样的。
它可以像昆虫那样慢慢地爬行,这时候每条腿的动作都很有规律,就像在跳一种很整齐的舞蹈。
也可以快速地移动,这个时候就需要更复杂的协调了。
6关节机器人介绍剖析

6关节机器人介绍剖析六关节机器人,也称为六轴机器人,是一种具有六个自由度的机器人系统。
每个关节都能够进行旋转,这使得机器人能够在三维空间中执行各种复杂的任务和动作。
下面我将对六关节机器人的结构、工作原理、应用领域以及优势进行介绍和剖析。
六关节机器人的结构主要由六个旋转关节组成,每个关节由电机驱动,通过齿轮传动或者其他传动方式将旋转运动传递到机械臂的末端。
这种结构使得机器人能够沿着不同的轴进行灵活的运动,实现各种复杂的动作。
同时,机器人的末端还可以配备各种工具或器械,从而可以在不同的领域中执行不同的任务。
六关节机器人的工作原理主要是通过控制每个关节的旋转角度,从而实现机械臂的整体运动。
通常采用的控制方式有PID控制、模糊控制、神经网络控制等。
通过计算机的精确控制,可以使机器人按照预先设定的路径或者姿态完成任务。
六关节机器人在各个领域都有广泛的应用。
在制造业中,它们可以完成各种组装、装卸、搬运、焊接等工作。
在医疗领域,它们可以辅助进行手术操作、康复训练等。
在军事领域,它们可以用于侦查、拆弹、装甲车维修等任务。
此外,它们还可以应用于航空航天、矿山、化工、食品加工等行业,为人们提供更安全、高效、精确的服务。
六关节机器人相比其他机器人系统具有一些独特的优势。
首先,六关节机器人具有较大的工作范围和灵活性,能够执行复杂的动作和路径规划。
其次,这种机器人的运动轨迹较为精准,可以实现高精度的定位和操作。
此外,六关节机器人在力矩和负载方面也具有较大的承载能力,可以应对不同的工作环境和工作负荷。
然而,六关节机器人也存在一些挑战和不足之处。
首先,它们通常需要较大的空间,并且布置和配置相对较为复杂。
其次,其运动控制需要较高的控制精度和计算能力,对控制系统提出了较高的要求。
此外,由于六关节机器人的结构较为复杂,对维护和保养也提出了较高的要求。
综上所述,六关节机器人是一种具有六个自由度的机器人系统,由六个旋转关节组成。
它们在制造业、医疗、军事等领域具有广泛的应用。
机器人ppt课件

算法与模型
控制算法
机器学习与深度学习模型
用于实现机器人的运动控制,如PID 控制、模糊控制等。
用于提高机器人智能水平,如物体分 类、语义分割等。
感知算法
处理机器人感知数据,如目标检测、 跟踪、辨认等。
05
机器人的未来发展
技术发展趋势
人工智能技术
随着机器学习、深度学习等人工 智能技术的不断发展,机器人将 具备更高级的认知和决策能力, 实现更精准、高效的任务执行。
技术伦理
随着机器人具备更高级的认知能力,技术伦理问题逐渐凸显,需要 关注人权、道德和责任等方面的问题。
06
机器人案例分析
家用服务机器人
家庭清洁机器人
负责家庭地面清洁工作,具备自主导航、避障和 智能控制功能,提高家庭清洁效率。
智能音箱
作为智能家居的控制中心,提供语音助手服务, 实现家电控制、信息查询和娱乐等功能。
交互技术
交互技术
使机器人能够与人或其他智能体进行交流和 互动。
自然语言处理
让机器人能够理解人类自然语言文本指令, 进行文本分析和语义理解。
语音辨认与合成
让机器人能够辨认和理解人类语音指令,并 生成语音反馈。
人机交互
通过触摸屏、手势辨认等技术,实现人机交 互,提高机器人的易用性和用户体验。
03
机器人的硬件结构
机器人ppt课件
汇报人:
xx年xx月xx日
• 机器人概述 • 机器人的关键技术 • 机器人的硬件结构 • 机器人的软件系统 • 机器人的未来发展 • 机器人案例分析
目录
01
机器人概述
机器人的定义与分类
定义
机器人是一种能够自动执行任务 的机器系统,具有感知、思考、 动作三个基本要素。
介绍机器人PPT下载

VIP专享文档下载特权自VIP生效起每月发放一次, 每次发放的特权有效期为1个月,发放数量由您购买 的VIP类型决定。
每月专享9次VIP专享文档下载特权, 自VIP生效起每月发放一次,持续有 效不清零。自动续费,前往我的账号 -我的设置随时取消。
服务特 权
共享文档下载特权
VIP用户有效期内可使用共享文档下载特权下载任意下载券标价的文档(不含付费文档和Vidu bibliotek
在购买的VIP时长期间,下载特权不清零。
100W优质文档免费下 载
VIP有效期内的用户可以免费下载VIP免费文档,不消耗下载特权,非会员用户需要消耗下载券/积分获取。
部分付费文档八折起 VIP用户在购买精选付费文档时可享受8折优惠,省上加省;参与折扣的付费文档均会在阅读页标识出折扣价格。
出发,将机器人分为两大类:
工业机器人
分类
特种机器人
工业机器人 就是面向工业领域的多
关节机械手或多自由度机器人。
特种机器人则是除工业机器人之外
的、用于非制造业并服务于人类的各种 先进机器人,包括:服务机器人、水下 机器人、娱乐机器人、军用机器人、农 业机器人、机器人化机器等。
家务型
能帮助人们打理生活,做简单的家务活。
特权说明
VIP用户有效期内可使用VIP专享文档下载特权下载或阅读完成VIP专享文档(部分VIP专享文档由于上传者设置不可下载只能 阅读全文),每下载/读完一篇VIP专享文档消耗一个VIP专享文档下载特权。
年VIP
月VIP
连续包月VIP
VIP专享文档下载特权
享受60次VIP专享文档下载特权,一 次发放,全年内有效。
日本研究人员27日推出新 型仿人型机器人“Twe ndy-One”。它集 安全性、可靠性和灵巧性 于一身,专门为老年人、 残障人等行动不便人士服 务。
l六足昆虫机器人机械原理
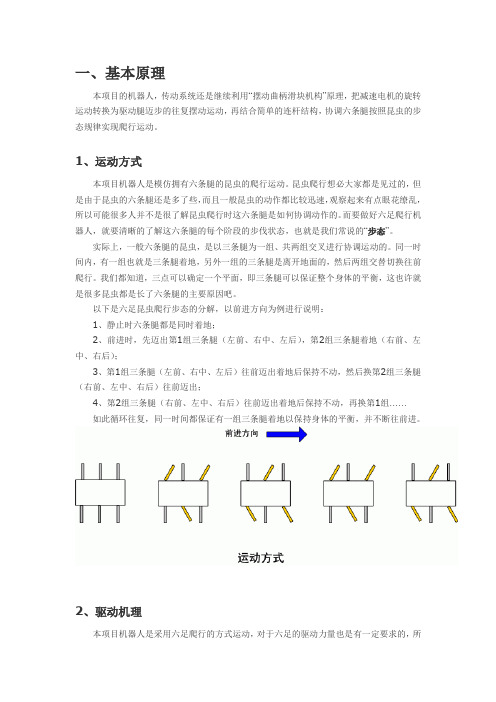
一、基本原理本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步态规律实现爬行运动。
1、运动方式本项目机器人是模仿拥有六条腿的昆虫的爬行运动。
昆虫爬行想必大家都是见过的,但是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱,所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。
而要做好六足爬行机器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。
实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。
同一时间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前爬行。
我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这也许就是很多昆虫都是长了六条腿的主要原因吧。
以下是六足昆虫爬行步态的分解,以前进方向为例进行说明:1、静止时六条腿都是同时着地;2、前进时,先迈出第1组三条腿(左前、右中、左后),第2组三条腿着地(右前、左中、右后);3、第1组三条腿(左前、右中、左后)往前迈出着地后保持不动,然后换第2组三条腿(右前、左中、右后)往前迈出;4、第2组三条腿(右前、左中、右后)往前迈出着地后保持不动,再换第1组……如此循环往复,同一时间都保证有一组三条腿着地以保持身体的平衡,并不断往前进。
2、驱动机理本项目机器人是采用六足爬行的方式运动,对于六足的驱动力量也是有一定要求的,所以与前几个仿生类机器人项目一样都是借助减速电机所具有的“低转速、高扭矩”的特性来实现的。
与PVC-Robot 11号、PVC-Robot 12号机器人驱动双臂以及与PVC-Robot 13号驱动双足类似,本项目机器人六足中的中间两足是主动足,是由减速电机直接驱动的,而采用的减速电机同样也必须要满足两个条件:1、拥有足够的动力,能够支撑双足行走;2、减速电机左右两侧同轴输出。
arduino仿生六足机器人教材

仿生六足机器人教材———基于Arduino开发平台V1.0目录一、机器人的组装 (1)1.1. 组装工具 (1)1.2. 装配步骤 (1)二、系统概述 (10)2.1.arduino介绍 (10)2.2.Arduino驱动安装 (13)2.3.Arduino IDE菜单介绍 (20)三、实验操作 (25)3.1 红外避障实验 (25)3.2 舵机实验 (27)四、使用说明 (31)4.1.接线端口介绍 (31)4.2.操作说明 (32)一、机器人的组装1.1. 组装工具工具:尖嘴钳、十字螺丝刀等。
1.2. 装配步骤1)首先是准备好机体2)在机体上装配4个M3X15mm的六棱铜柱,所用到4个M3X8mm的螺钉如下图所示:我这里为了方便能够清楚看到螺钉与铜柱的连接把它分开了。
4)下一步就是装两个模拟舵机和付板,所用到八个螺钉,八个螺母如下图所示1是分解装配6)这一步是两个十字舵盘的安装,这里用到两个M3X6mm的螺丝8)组装M3X20mm、M3X25mm的六棱铜柱,这里中间部位是两个M3X20mm六棱铜柱,两侧是M3X25mm的六棱铜柱,用到M3X8mm 的螺丝10)中间脚的组装,M3X20螺丝、M3螺母、钢纸垫片11)组装连接杆12)另一个连杆组装13)两侧脚组装,这里用到M3X8螺丝、M3螺母、钢纸垫片14)固定完成15)中间脚上部螺丝的固定,这里用到M3X8螺丝、钢纸垫片二、系统概述2.1.arduino介绍要了解arduino就先要了解什么是单片机,arduino平台的基础就是A VR指令集的单片机。
1、什么是单片机?它与个人计算机有什么不同?一台能够工作的计算机要有这样几个部份构成:中央处理单元CPU(进行运算、控制)、随机存储器RAM(数据存储)、存储器ROM(程序存储)、输入/输出设备I/O(串行口、并行输出口等)。
在个人计算机(PC)上这些部份被分成若干块芯片,安装在一个被称之为主板的印刷线路板上。
机器人PPT课件

家务型
能帮助人们打理生活,做简单的 家务活。
日本研究人员27日推出新型仿人 型机器人“Twendy-On e”。它集安全性、可靠性和灵 巧性于一身,专门为老年人、残 障人等行动不便人士服务。
搜救类
在大型灾难后,能进入人进入不了的废墟中, 用红外线扫描废墟中的景象,把信息传送给在 外面的搜救人员。
单击此处添加副标题内容
Thank you
机器人发展前景
智能化可以说是机器人未来的发展方向,智能机器人是具有感知、 思维和行动功能的机器,
是机构学、自动控制、计算机、人工智能、微电子学、光学、通 讯技术、传感技术、仿生学等多种学科和技术的综合成果。
对于未来意识化智 能机器人很可能的
几大发展趋势
❖语言交流功能越来越完美 ❖各种动作的完美化 ❖外形越来越酷似人类 ❖逻辑分析能力越来越强 ❖具备越来越多样化功能
中国的机器人专家从应用环境出发,将机器人分为两大类: 工业机器人 特种机器人 分类
工业机器人 就是面向工业领域的多关节机械手或多自由度机器人。
特种机器人则是除工业机器人之外的、用于非制造业并服务于 人类的各种先进机器人,包括:服务机器人、水下机器人、娱 乐机器人、军用机器人、农业机器人、机器人化机器等。
仿蛇机器人不仅可以作 为管道检测装置,也可 以作为地震或矿难探索 装置,更可以当作 极 地 探测器来进行科研 活动。
智能
以人工智能决定其行动的机器人。 大阪大学智能机器人研究所所长石黑浩在2014全 球移动互联网大会时,展示了与女性外貌的智能 机器人互动 Kirobo具有面部识别功能,并可与人类对话,用 于在太空中陪伴宇航员。2013年9月,正式登上 太空。
人类的帮手—— 机器人
制作人:
六足机器人的步态分析与实现——1

六足机器人的步态分析与实现——1六足机器人的步态分析与实现——1步态是指机器人在运动中的腿部动作序列和时序,能够决定机器人的移动效果和稳定性。
六足机器人的步态有多种类型,例如三角步态、波浪步态和平行步态等,每种步态都有其优势和适应环境的特点。
下面将以三角步态为例,探讨六足机器人的步态分析与实现。
三角步态是一种相对简单且稳定的步态,通过两组对角线的腿部交替运动实现机器人的平稳移动。
其中,每组对角线的腿部依次为前左、中右和后左腿以及前右、中左和后右腿。
三角步态通常有两个阶段,即支撑阶段和摆动阶段。
在支撑阶段中,对角线的前两条腿同时着地,提供支撑力,使机器人保持平衡。
在此同时,后两条腿离地并进行摆动准备。
支撑阶段的关键是保持机器人的平衡,可以通过传感器实时检测机器人的倾斜角度,并通过调整腿部摆动幅度来保持平衡。
在摆动阶段中,先离地的两条腿进行前摆,后两条腿进行后摆,以便于整个机器人向前移动。
在摆动阶段,需要考虑腿部运动的坡度、步幅和频率等参数,以实现稳定的步态和高效的移动。
摆动阶段的关键是合理分配腿部的移动,以保证机器人的稳定和平滑的前进。
为了实现六足机器人的步态,需要通过控制系统和传感系统来实现腿部的运动控制和平衡调整。
控制系统可以使用反馈控制算法,通过传感器获取机器人的姿态信息,并进行实时的运动控制。
传感系统可以使用力传感器、陀螺仪和加速度计等传感器,实时监测机器人的姿态和环境信息。
另外,六足机器人的步态实现还需要考虑到各腿之间的协调和同步。
可以通过通信模块实现腿部之间的信息传递和协调,以确保六足机器人在运动中的平衡和稳定。
总结来说,六足机器人的步态分析与实现是一个复杂而关键的过程。
需要考虑到机器人的稳定性、效率和灵活性,选择合适的步态类型,并且通过控制系统和传感系统实现腿部的运动控制和平衡调整。
通过合理的步态设计和实现,可以使六足机器人在各种环境中实现平稳、高效的移动。