后驱电动轮汽车电子差速控制影响因素分析
电动汽车直接转矩控制电子差速滑移率滑模控制论文

双轮直驱电动汽车电子差速控制的研究【摘要】多电机驱动电动汽车真正从电机驱动的特点出发,结构上摆脱了传统内燃机汽车的束缚,更充分地发挥了电驱动的优势。
多电机驱动是电动汽车全面产业化的核心技术,其应用可使电动汽车由传统汽车底盘基础上简单的能源更替,跨越到从结构到能源,从驱动性能到操控性能全面的、革命性的提高。
电子差速技术(Electric Differential)通过多电机的协调控制,取代了传统汽车冗杂的机械差速装置,是保证车辆精确转向,具有良好操控性的关键性技术。
本文以双轮毂电机前轮驱动电动汽车为研究对象,对双驱动电机的差速控制问题进行了深入研究。
论文的主要工作有以下内容:首先,根据电动汽车的驱动特点,采用异步轮毂电机直接转矩控制作为单机牵引控制策略,以异步电机状态方程为基础,对直接转矩控制系统进行了理论分析,并针对车辆的各种驱动方式,对牵引性能进行了计算机仿真,仿真结果验证了控制方案的可行性,为进一步的差速研究奠定了基础。
其次,针对Ackermann差速模型在路面条件差,左右轮驱动电机负载不同,双轮驱动电机转速的动态误差累积形成差速偏差的问题,以前馈和反馈控制理论为依托,构建了结构灵活的虚拟主从控制策略,动态双向补偿左右轮电... 更多还原【Abstract】 From the perspective of features of motor drive, Multi-motor-driven EV gets rid of shackles of the traditional internal combustion engine vehicles in terms of structure andplays the advantages of electric drive fully. Multi-motor drive is the core technology of EV comprehensive industry, which changes the traditional energy alternation on the auto chassis to an overall and revolutionary improvement which is from structure to energy and from drivability to handling capability.Electronic differen... 更多还原【关键词】电动汽车;直接转矩控制;电子差速;滑移率;滑模控制;【Key words】Electric Vehicle;DTC;Electric Differential;Slip Ratio;Slip Mode Control;【索购硕士论文全文】Q联系Q:138113721 139938848 即付即发目录摘要5-7Abstract 7-8第一章绪论11-161.1 课题研究的目的和意义11-121.2 国内外研究现状12-151.3 本文的主要工作15-16第二章基于多电机协同控制的电动汽车转向差速控制16-282.1 双轮独立驱动电动汽车16-182.1.1 双轮独立驱动电动汽车结构16-172.1.2 驱动电机选型及控制策略17-182.2 虚拟主从控制的电动汽车同步控制策略18-242.2.1 Ackermann转向差速模型18-212.2.2 虚拟主从控制原理21-222.2.3 控制系统参数的选择22-242.3 虚拟主从差速控制仿真分析24-272.4 本章小结27-28第三章基于滑移率辨识的电动汽车转向差速控制28-493.1 电动汽车非线性数学模型28-303.2 电动汽车滑移率30-313.3 电动汽车整车性能仿真分析31-383.3.1 干沥青路面整车性能仿真32-363.3.2 沙土路面整车性能仿真36-383.4 最优滑移率的生成38-423.4.1 驱动力观测器39-403.4.2 路况条件估计器40-423.5 基于滑模的转矩分配控制42-433.6 仿真对比分析43-473.6.1 干沥青路面仿真对比分析43-463.6.2 沙土路面整车性能对比仿真分析46-473.7 本章小结47-49第四章电动汽车电机驱动控制系统实验研究49-634.1 轮毂电机驱动系统硬件设计49-534.1.1 信号控制电路504.1.2 主功率驱动50-514.1.3 速度检测电路设计51-524.1.4 电流电压采样部分52-534.2 轮毂电机驱动系统软件设计53-564.2.1 软件的总体框架53-544.2.2 主要功能模块的实现54-564.3 轮毂电机驱动系统实验56-574.4 基于LabView的电动汽车运行状态监控系统57-624.4.1 电机驱动状态监控平台57-604.4.2 驾驶员操纵平台和转向差速模块的设计60-624.5 本章小结62-63第五章结论63-64参考文献。
电动汽车电子差速控制技术探析

电动汽车电子差速控制技术探析
赵军
【期刊名称】《汽车周刊》
【年(卷),期】2022()8
【摘要】随着时代的发展以及人们思想的进步,越来越多的人认识到环境保护的重要性,近年来,石化资源短缺问题日益严峻,资源保护问题开始得到人们的重视。
除了对现有的资源进行保护、对现有的资源节约利用之外,人们也开始探寻更加环保、更加绿色化的生活方式,在这种大环境之下,新能源电动汽车应运而生。
本篇文章主要对新能源电动汽车的电子差速控制结构、控制方法进行介绍,对电动汽车电子差速控制技术进行进一步的探究,从而为电动汽车电子差速控制技术的发展提供一定的理论指导,进而推动我国新能源电动汽车行业的进一步发展。
【总页数】3页(P0024-0026)
【作者】赵军
【作者单位】安徽省第一轻工业学校
【正文语种】中文
【中图分类】U
【相关文献】
1.电动汽车电子差速控制技术研究
2.电动汽车电子差速控制技术分析
3.电动汽车电子差速控制技术研究综述
4.分布式驱动电动汽车电子差速控制策略研究
5.电动汽车电子差速控制策略研究
因版权原因,仅展示原文概要,查看原文内容请购买。
双电机驱动汽车差速控制解析
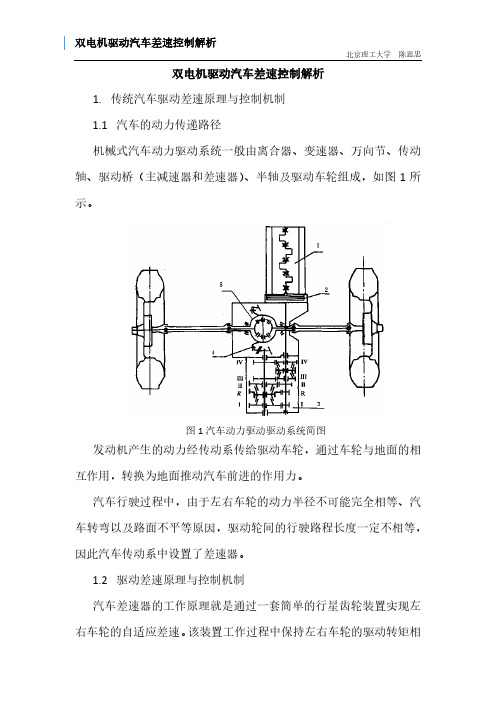
双电机驱动汽车差速控制解析1.传统汽车驱动差速原理与控制机制1.1汽车的动力传递路径机械式汽车动力驱动系统一般由离合器、变速器、万向节、传动轴、驱动桥(主减速器和差速器)、半轴及驱动车轮组成,如图1所示。
图1汽车动力驱动驱动系统简图发动机产生的动力经传动系传给驱动车轮,通过车轮与地面的相互作用,转换为地面推动汽车前进的作用力。
汽车行驶过程中,由于左右车轮的动力半径不可能完全相等、汽车转弯以及路面不平等原因,驱动轮间的行驶路程长度一定不相等,因此汽车传动系中设置了差速器。
1.2驱动差速原理与控制机制汽车差速器的工作原理就是通过一套简单的行星齿轮装置实现左右车轮的自适应差速。
该装置工作过程中保持左右车轮的驱动转矩相等,但某一车轮阻力减小时,容许其转速增加;反之当车轮阻力增加时,容许车轮转速减低。
事实上,汽车行驶过程中,驱动车轮不是独立存在的,一方面车轮作为汽车的一分子,需随汽车一起运动,同时车轮运动也受地面的约束,在附着作用范围内,车轮转速的变化受到地面附着的约束。
因此汽车差速器的工作原理,可以这样解析:差速装置给左右车轮相等的驱动转矩,即等转矩控制;车轮转速由路面约束,即在路面约束条件下,车轮自动调节转速,以实现阻力最小。
2.双电机驱动汽车的差速控制原理2.1双电机驱动汽车的动力传递路径对于双电机驱动的汽车,动力源可能是动力电池组或发电机+电池,但驱动系统基本上如图2所示。
图2 双电机驱动系统简图这类电驱动汽车,由于电机控制策略的不同,都要面临左右车轮因行驶路程不同而需要进行差速控制问题。
2.2驱动电机及其控制策略目前,电动汽车广泛应用的驱动电机主要有异步电动机、无刷直流电动机和永磁同步电动机(PMSM)三种。
异步电动机具有结构简单、可靠性高,控制技术相对成熟等优点。
异步电动机的控制方法主要有恒压频比控制、矢量控制和直接转矩控制等。
恒压频比控制的优点是控制方法简单,转速的改变可以通过控制电源频率实现;其缺点是动态性能不好,在突加负载或转速给定突变时容易发生失步现象。
电动汽车差速系统研究综述

1摘要23451.摘要总结了电动汽车传动系统的结构布置情况及电动汽车差速系统研究的两个方向———自适应差速的特殊电机设计和基于各种控制理论采用差速控制策略的电子差速系统设计。
阐述了自适应差速系统的结构及其差速原理 ,并详细阐述了电子差速系统的控制结构、控制模型、控制变量及控制策略,同时对目前电子差速系统选择电机转速和转矩作为控制变量的利弊进行了探讨。
最后, 展望了电动汽车差速系统的发展前景。
关键词: 电子差速;双转子电机 ; 电动汽车 ; 车辆动力学 ; Ackermann & Jeantand 模型2.引言电动汽车动力传动系统的结构布置主要有两种方式:集中式和分布式。
集中式驱动是指在传统内燃机汽车安装发动机的位置以一个电动机代替内燃机 ,其他传动系统的结构不改变的驱动形式;分布式驱动是根据电动汽车自身特点采用车轮独立驱动的驱动形式。
分布式驱动电动车在回馈制动、机动性、车身内部空间利用率、可控性等方面均优于内燃机汽车和集中式驱动电动车,因此, 采用分布式驱动方式是电动汽车发展的一个重要方向。
集中式驱动电动汽车应用机械差速器即可完成转向 , 而分布式驱动电动汽车的每一个驱动轮连接一个电机转子, 每个电机转子可以单独提供驱动力矩 ,两驱动轮间去掉了机械差速器。
目前 ,对分布式驱动电动汽车差速系统的研究可分为两个方向 :一个方向为自适应差速的特殊电机设计;另一个方向为应用基于各种控制理论采用差速控制策略的电子差速系统设计。
本文主要从这两个方向分析电动汽车差速系统的研究现状 ,并探讨存在的问题及其发展方向。
3.自适应差速自适应差速是一种采用与传统汽车机械差速器原理十分类似的、可差速运行的双转子电机作为驱动电机,在电动汽车转向时可实现自差速的方法。
双转子电机直接安装在驱动桥上 ,代替常规机械驱动桥的传动轴、主减速器和差速器等构件,集驱动、差速、制动能量再生为一体。
如双转子轴向磁通电机、反相双转子电机、复合多相双转子电机等均可实现差速运行, 能直接作为驱动电机。
电动汽车整车控制系统常见故障原因与分析

电动汽车整车控制系统常见故障原因与分析目录1. 内容概括 (2)1.1 文档目的 (2)1.2 文档结构 (3)2. 电动汽车整车控制系统的概述 (4)2.1 系统组成 (5)2.2 系统功能 (6)3. 常见故障类型 (7)3.1 动力电池故障 (9)3.2 电机及其驱动系统故障 (10)3.3 整车控制系统软件故障 (11)3.4 制动系统故障 (13)3.5 充电系统故障 (14)4. 故障原因分析 (15)4.1 元件或组件的质量问题 (17)4.2 设计缺陷或不合理 (18)4.3 制造过程中的缺陷 (19)4.4 装配不当或维护不当 (20)4.5 使用环境或使用不当 (21)4.6 软件开发或固件问题 (23)4.7 外部因素影响 (24)5. 故障诊断与排除方法 (25)5.1 故障诊断流程 (26)5.2 使用诊断工具 (27)5.3 故障排查步骤 (29)5.4 故障排除策略 (31)6. 典型案例分析 (32)6.1 动力电池故障案例 (33)6.2 电机系统故障案例 (34)6.3 整车控制系统软件故障案例 (35)6.4 制动系统故障案例 (36)6.5 充电系统故障案例 (38)7. 预防与维护措施 (39)7.1 质量控制与提高 (40)7.2 设计改进与优化 (42)7.3 制造与装配质量保证 (43)7.4 使用与维护规范 (44)1. 内容概括本文档旨在系统分析电动汽车整车控制系统中常见的故障原因,并为相关技术人员提供故障诊断与排除的指导。
通过对故障现象的深入剖析,本报告将详细描述各种可能导致电动汽车控制系统故障的潜在原因,并提供故障诊断与解决的具体方法。
读者将能够在理解不同故障模式的基础上,有效地识别问题并采取恰当的措施来解决问题。
本文档的结构将首先介绍电动汽车整车控制系统的基本概念和关键组件,随后详细讨论故障常见的表现形式和相应的分析方法,包括软件问题、硬件故障、通信故障等方面。
轮毂电机驱动式微型电动汽车电子差速控制策略

轮毂电机驱动式微型电动汽车电子差速控制策略
李志远;王涛;张庆培;李贺;赵岩飞
【期刊名称】《河北大学学报(自然科学版)》
【年(卷),期】2015(035)004
【摘要】针对轮毂电机驱动式微型电动汽车的电子差速控制,考虑滑转率和轴荷转移的影响,提出了以驱动轮转矩为控制量,以电动汽车内外侧驱动轮滑转率均衡为控制目标,并考虑汽车转弯时轴荷转移的差速控制策略,进行了差速控制实车试验.试验结果表明,所采用的控制策略合理,控制器能够较好地协调2后驱动轮转矩,实现了汽车电子差速控制.
【总页数】5页(P422-426)
【作者】李志远;王涛;张庆培;李贺;赵岩飞
【作者单位】河北大学质量技术监督学院,河北保定071002;河北大学质量技术监督学院,河北保定071002;河北大学质量技术监督学院,河北保定071002;河北大学质量技术监督学院,河北保定071002;河北大学质量技术监督学院,河北保定071002
【正文语种】中文
【中图分类】U469.72
【相关文献】
1.后轮轮毂电机驱动电动汽车电子差速控制器研究 [J], 段敏;孙明江;闫鹏斌;鲁东;周正心
2.轮毂电机驱动电动汽车电子差速器仿真研究 [J], 孙明江;段敏;李刚
3.基于滑移率的轮毂式电动汽车电子差速研究 [J], 戴彦;吕宏丽
4.高速转向工况下轮毂式电动汽车电子差速控制设计 [J], 王东涛
5.双轮毂电机驱动电动汽车电子差速控制研究 [J], 杨云庆;赵红兵;王吴杰;徐兴因版权原因,仅展示原文概要,查看原文内容请购买。
四轮轮边驱动电动公交车电子差速控制研究

国内图书分类号:U469.72 密级:公开国际图书分类号:629西南交通大学研究生学位论文四轮轮边驱动电动公交车电子差速控制研究年级二O一六级姓名陈晓菲申请学位级别工程硕士专业车辆工程指导老师刘平副教授二零一九年五月Classified Index:U469.72U.D.C:629Southwest Jiaotong UniversityMaster Degree ThesisResearch on Electronic Differential Control of Four-wheel Wheel-drive Electric BusGrade:2016Candidate:Chen XiaofeiAcademic Degree Applied for :MasterSpeciality:Vehicle EngineeringSupervisor:Liu PingMay.30,2019摘要分布式驱动形式汽车是一种新型的电驱动汽车,取消了传统汽车上的发动机、变速器、传动轴、差速器等机械结构,驱动电机直接与车轮或经过减速器后与车轮相连。
这种驱动形式相比较传统汽车具有更高的传递效率,从控制上也具有更高的灵活性。
但在取消了机械差速器的同时需要设计合理的电子差速控制器,本文主要是针对电子差速控制策略在四轮独立轮边驱动电动公交车的应用展开了相关的研究。
本文研究对象为四轮独立轮边驱动电动公交车,以该车为原型进行Trucksim动力学软件建模,并与MA TLAB/simulink联合搭建电动汽车联合仿真模型,其中包括车体、轮胎、悬架KC特性、制动系统和转向系统等子模块的建模。
将搭建的车辆模型进行最小转弯直径、30km/h直线滑行距离、0-30km/h加速时间仿真实验,并与实车试验数据进行对比,验证了模型的准确性。
分析传统机械差速器的工作原理,并以此为依据提出以滑转率作为电子差速评价指标,且电子差速控制目标为使驱动轮滑转率保持在稳定区域。
4WID-EV的自动差速原理及控制策略

4WID-EV的自动差速原理及控制策略1. 什么是自动差速?自动差速是指在车辆行驶时,通过车载电脑系统对车辆各轮的转速进行检测和比较,确定车辆行驶状态下各轮的转速差异,并根据运动学原理和轮胎摩擦力的特性,控制差速锁或电子差速器,在车辆行驶时自动进行差速控制。
2. 自动差速的原理一般来说,车辆行驶时车轮的转速不可能完全相等,因为各轮的部件和力的作用方式都不同,因此车轮之间的差异就产生了。
如果车辆行驶时车轮之间的差异较大,就会出现侧滑、散旋、偏移等情况,甚至产生危险。
自动差速原理就是基于“左右轮之间的差异越小,车辆行驶越稳定”的运动学原理。
在差速控制中,车载电脑检测车轮的转速,如果某一侧的车轮转速低于另一侧车轮,则会通过控制差速器将动力更多地分配给低速车轮,使车辆更好地向前推进。
3. 自动差速的控制策略自动差速的控制策略可以分为两种:机械差速和电子差速。
机械差速是一种传统的差速技术,包括差速锁和限滑差速器。
通过差速锁锁定轴的左右两轮轮轴,使动力通过左右两轮轮轴传递,保持左右轮的转速一致;限滑差速器则采用液压或机械结构控制驱动轮转速差,从而防止车轮打滑。
而电子差速则将变速器和差速器直接相连,并通过车载电脑控制车轮的转速,从而实现对轮胎摩擦力的精确控制。
通过车载电脑对车辆行驶状态的实时检测和分析,可以更加准确地控制车轮的行进速度和力的分配,从而提升车辆行驶时的稳定性和安全性。
综上所述,自动差速作为现代汽车技术的重要组成部分,凭借着其先进的控制策略和优秀的性能,在提升车辆行驶稳定性和安全性方面起着至关重要的作用。
随着科技的不断发展和创新,相信在不久的将来,自动差速技术将不断得到改进和完善,成为汽车领域的一项重要突破。
4. 自动差速的应用场景自动差速技术广泛应用于越野车、SUV、卡车等重载车辆以及赛车等高性能车型中。
在越野行驶中,能够有效提升车辆通过性;在高速行驶中,能够保证车辆稳定性和安全性;在赛车比赛中,能够帮助选手更好地控制赛车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014年(第36卷)第2期 汽车工程 Automotive Engineering 2014(Vo1.36)No.2
2014041
后驱电动轮汽车电子差速控制影响因素分析 严运兵 ,彭思仑 (1.武汉科技大学汽车与交通工程学院,武汉430081;2.吉林大学汽车工程学院,长春130025)
[摘要] 为实现电动轮汽车的差速功能并评估控制系统的影响因素,以两侧驱动轮滑移率一致为目标,提出 了基于转矩控制的差速控制策略,利用BP神经网络方法,设计了电子差速控制系统。运用汽车动力学理论,建立了 9自由度的前轮转向后轮驱动电动轮汽车动力学模型,以进行理论分析和仿真。通过对模型的合理简化和线性化, 得到了控制系统线性状态方程和车轮滑移率的解析表达式。根据理论分析,影响电子差速控制性能的参数主要是 整车质量和质心位置。但仿真结果表明,整车质量对控制效果影响不大,质心位置对控制性能影响相对较大,但整 体上仍然较小。所提出的电子差速控制策略达到预期目标,控制系统对系统参数变化具有较好的鲁棒性。 关键词:汽车;电动轮;电子差速;状态方程;影响因素
An Analysis on the Affecting Factors of Electronic Differential Control for Rear In—whee1 Motor Drive Vehicles
Yah Yunbing 1.School ofAutomobile and TrafficEngineering,IVuhan 2.College ofAutomotive E neering,
&Peng Silun Univers ofScience and Technology,Wuhan 430081; Jilin University,Changchun 130022
[Abstract]To achieve electronic differential function and to estimate the affecting factors of its control sys. ten for an in。wheel-motor drive electric vehicle,and with equalizing the slip rats of both drive wheels as objective, a differential control strategy is proposed based on torque control scheme and an electronic differential control system is designed by using BP neural network method.Based on vehicle dynamics theory,a 9 DOF dynamic model for an
in-wheel—motor drive electric vehicle with front.whee1.steering and rear.whee1.drive is built to conduct thgoretical a. nalysis and simulation.Through the reasonable simplification and linearization of model,the linear state equations of
control system and the analytical expression of wheel slip rate are derived.According to theoretical analysis.the key parameters affecting the electronic differential control performances are vehicle mass and the position of mass center, while the stimulation results show that the effect of the position of mass center on control system perfoIn'laBce.though
still relatively small,is far more than that of vehicle mass.The electronic differential control strategy proposed a— chieves the expected objective and the control system has sound robustness to system parameter variation. Keywords:vehicles;motorized wheels;electronic differential;state equations;affecting factors
日IJ舌 随着电动汽车的兴起,电动轮驱动汽车越来越 受到密切关注…。电动轮汽车的关键技术之一是驱 动轮的差速控制。控制策略主要有基于转速的控制
策略和基于转矩的控制策略两种。基于转速的差速 控制策略利用Ackerman模型建立汽车各轮转速关 系,并通过这种关系来实现对驱动轮转速进行控 制 。但在实际行驶过程中,路面情况非常复杂,而 且这种控制方式限制了自由度,在转向角较大或车 速较高时,一旦出现控制误差,容易出现不稳定状
国家自然科学基金(61074036)和湖北省教育厅重点项目(D20121104)资助。 原稿收到日期为2012年4月12日,修改稿收到13期为2012年6月4日。 严运兵,等:后驱电动轮汽车电子差速控制影响因素分析 况 J。基于转矩的控制策略不会对两侧驱动轮施加 运动自由度的限制,汽车转向时由于内、外侧车轮滚 动半径的不一致所导致的矛盾不再突出,有利于滑 移率的控制 J。据此,本文中以前轮转向后轮驱动 电动轮汽车为研究对象,以两侧驱动轮滑移率一致 为目标,设计出基于转矩控制的电子差速策略,并建 立9自由度电动轮汽车模型;通过对模型的合理简 化与线性化,写出其线性状态方程,得出滑移率的解 析表达式;以此为基础,进一步对可能影响控制效果 的关键因素进行理论分析和仿真。 1 电子差速策略与控制系统 对于电动轮驱动汽车,其两侧电动轮的驱动相 互独立,因此电动轮驱动汽车更适合通过转矩控制 来实现转向差速功能 J。 汽车转向时若采用两侧驱动转矩平均分配,将 导致两侧车轮滑移率不均衡,即内侧车轮滑移率高 于外侧车轮滑移率,不仅使内侧车轮磨损加剧,而且 使内侧车轮更容易进入不稳定状态,影响汽车行驶 稳定性和安全性。因此,本文中提出转向时内、外侧 驱动轮滑移率保持一致的基于转矩控制的电子差速 策略。 依据上述策略要求,采用BP神经网络方法,设 计了如图1所示的电子差速控制系统。该系统包括 BP神经网络和电子油门分配两个模块。 转向盘转角 加速踏板厂一 行程 l 经 墼l电子 网络J ’J ~1分配 电子差速控制器 左侧电子油 门开度口 1 右侧电子油 门开度口 电 动 轮 驱 动 汽 查 图1 电子差速控制系统结构图 BP神经网络主要以内外侧驱动轮滑移率一致 为控制目标,并根据转向盘转角和车速计算两侧电 动轮的电子油门分配百分比k ,称为转矩调节量。 经过反复训练,最终确定了2x12x1的BP网络控制 器结构 输入层有两个节点,分别代表转向盘转角和 车速的输入,输出层则只有一个节点,表示转矩调节 量,隐含层有12个节点。 电子油门分配模块根据加速踏板行程和神经网 络输出的转矩调节量计算两侧驱动电机的目标电子 油门开度,以此来调节两侧电动轮驱动转矩,从而实 现基于转矩控制的电子差速功能。
2车辆模型的线性状态方程 2.1整车模型 图2为9自由度电动轮汽车整车模型 J,主要 包括汽车的纵向速度“、横向速度 、横摆角速度r、 车身侧倾角速度P、4个车轮的转动角速度和前轮转 向角。可进一步推导得到如式(1)所示的9自由度 动力学方程。 P
_÷c I:
图2整车动力学模型 m =耋 一 sin0- 1 c。A 4 ma =∑Fy
l=a(F +Fy3)一b(F伫+F似)+ { 71 7T (1) l÷( + )一÷( + ) J z z
. =m gh sin+一m h 。 一 一C 1
.. . 1 f+G f+ K 6f=i ̄Kfi +Md—tmF
【J 击 =Tm 一F i — d,i=1,2,3,4 式中:m为汽车总质量;m 为簧载质量;g为重力加 速度;r为车辆横摆角速度; 为整车绕 轴的转动惯 量; 为簧载质量绕 轴的转动惯量;C。为汽车空气 阻力系数;A 为汽车迎风面积;p 为空气密度;0为路 面坡度;咖为车身的侧倾角; 、 分别为侧倾刚度 和阻尼;a 、a 分别为整车质心的纵向与侧向加速 度;口 为非簧载质量的侧向加速度;,fw为单个前轮绕 转向轴(主销)转动惯量的2倍; 为前轮转向角;C 为转向阻尼系数; 为转向盘转角与车轮转角比值; 为简化的转向系统总扭转刚度; 为轮胎回正力 矩; 为由主销后倾角引起的机械拖距; 为前轮总 侧向力;Jm为电动轮的转动惯量;0.9 为车轮角速度; 汽车工程 2014年(第36卷)第2期 T 为电机驱动转矩;im为电动轮驱动电机与车轮之 间的传动比;R为车轮半径;Fz为地面垂直反作用 力;d为 :距轮心的偏心距。 2.2模型的线性化处理 为便于分析控制系统的影响因素,须求出上述 9自由度动力学模型的解析解。但该模型存在非线 性,有必要对模型进行简化,最终写出其线性状态方 程,得到其解析解。 由于转向系和车身侧倾运动主要是对转向时的 动态特性产生影响,而本文中重点关注转向稳定后 的特性,因此在建立状态方程时前轮转向角的自由 度和车身侧倾自由度可不予考虑 ]。忽略转向系 统和车身侧倾的影响,则可得出电动轮驱动汽车的 7自由度数学模型如下: r 4 1 lma =∑F mgsinO一÷cDA£p M I 二
l ma =∑F j (21 l=。(F 1+F )一b(Fy2+F )+ I 71 l(F +F )一÷(F + )
Jm = i 一F R—F d,i=1,2,3,4 该数学模型仍然是非线性的,可以将其线性化。 本文中侧重于研究电动轮汽车在驱动工况下匀速行 驶时两侧驱动转矩的分配与滑移率的关系,因此可 假设汽车前进速度波动不大,将汽车纵向速度 表 示为 u=Uc+Au (3) 式中:u 为车辆的恒定前进速度;Au为与 和r同一 数量级的、相对于车速u 的扰动量。在小扰动假设 条件下,乘积△ ・r和/3・r的值可以忽略。同时空 气阻力可表示为 F =CDA (/3, +2u。Au)/2 (4) 假定轮胎工作在线性区域,即滑移率不超过 10%,侧偏角不超过5。,令每个车轮的滑移刚度均为 k ,前两轮侧偏刚度为k ,后两轮侧偏刚度为k 不 考虑轮胎力向车辆坐标系的投影可得 fF =F = s (i=1,2,3,4) k ̄foli