LM调试软件Somove使用说明精编
调光台
总擦除(WIPEALL)*把钥匙旋转到系统的位置上。
进入系统模式(SYSTEM MODE)。
*按下软按钮A(Softbutton A) [SERVICE(服务)] 。
进入服务(SERVICE)菜单。
*按下软按钮F(Softbutton F)[WIPEALL(擦除)] 。
确认按软按钮F , 否则按EXIT键。
*再按一次Softbutton F。
控制台回到系统菜单的模式(SYSTEM MODE)。
*把钥匙旋转到编程的位置上。
进入编程的菜单模式。
*开始编写程序!配接常规的灯具在控制灯具或调光器之前,你先配接它。
配接这种功能是把控制台的通道与一个实际输出通道相连接。
我们用"旅馆房间编号"理论来预置推杆。
即:在第0页中预置第1-60号推杆,在第1页中预置第100-160号推杆等等。
建立常规灯(Dimmer)配接*把钥匙旋转到编程状态(Program), 进入编程模式。
*在蓝色的编程选择键中按下PATCH 钮(配接)。
进入配接调光器或设备菜单(PA TCH DIMMER OR DEVICE)。
VGA 屏幕将自动地转换到使用的DMX 地址上。
*选择你想要配接灯具的页。
0页配接(PATCH)到推杆001-060号上。
1页配接(PATCH)到推杆101-160号上。
2页配接(PATCH)到推杆201-260号上。
3页配接(PATCH)到推杆301-360号上。
*按软键A (Softbutton A) [DIMMER(调光器)] 。
屏幕会问你输入DMX的号和你要配接的SWOP按钮。
*按下并按住第1号灰色的预置ADD按钮,预置区的A和B的灯会同时闪一下。
*仍然按主这个按钮,按一下第30灰色预置ADD按钮并放松。
预置区的A和B的灯会同时亮起来,直到控制台做好配接才灭掉。
*如要配接另外一页灯具,重复上面的过程。
这种方法最大能配接120个预置调光器(Dimmer Presets)。
*按下EXIT或者PA TCH按钮退出配接状态。
LM90软件常用使用方法
LM90编程软件使用方法―――程序的上传因我公司维修工很少有练习使用软件的机会,目前培训资料上的内容不适合我公司工厂的维修人员,为了帮助维修人员提高实践能力,特编写此类指导书。
指导书会指导维修人员一步一步的实现操作,从未接触过PLC或编程软件的人也能按此指导书完成一些实际的操作。
首先要安装LM90软件,DOS/WIN95/98/ME/2000等操作系统,可以安装LM90 9.02版本,WINXP可以安装LM90 9.05以上版本,也可以用GE的编程软件Cimplicity Machine Editon软件,这里我们主要说明LM90的一些简单用法。
在纯DOS操作系统下,我们要修改一些启动的配置文件方能运行LM90。
MS-DOS 5.0以上版本,内存2MB以上,硬盘至少要大于4MB(现在的电脑基本没问题,但是一些老电脑则不行,比早期电脑有的没有硬盘,只有软驱),另外在启动配置文件Config.sys中需要加入一些命令:Device=HIMEN.SYSDos=High,UMBDevice=Emm386.exe 1024 RAMBuffers=40Files=20备注:Himem.sys,Emm386.exe等文件要在启动盘上。
这些命令主要是保证LM90能在DOS下正常的运行,另外也可在自动批处理文件Autoexec.bat中加入命令:SET $PLCROOT=C:\LM90为保证程序正常运行,我们建议安装在C盘根目录下。
在WIN95/98/ME/2000等系统里则比较简单,只要注意安装时提示允许在Windows下运行即可。
如何将程序从PLC(可编程控制器)上传到PC(计算机)首先用通讯电缆把PLC与PC连接。
在计算机上运行LM90.bat,也可在Windows(微软的操作系统)下从桌面开始菜单中选择PLC Programmer――> Logicmaster 90-30,则会出现如下画面:在Windows下按“ALT”+“Enter”键将会全屏显示,这个图的第一排显示是不同类型PLC,有 90 MICRO,90-20,90-30三种型号,程序默认的是90-30系列,用“Shift”+“Fn”(F1,F2,F3)组合键可以选择其它型。
LXM调试软件Somove使用说明
确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接
选择modbus串行,并单击最右边编辑图标
选择对应的COM端口,单击应用并确定
然后电脑和伺服驱动器的通讯就可以开始了,单击连接
选择Lexium26,并单击连接
这三个输入区域可以分别用右侧示波器栏顶部的三个按钮打开
这是右侧示波器栏顶部的一排按钮,它们的功能是这样的:
:用于打开和关闭左侧三个输入区域
:用于加载和保存捕捉到的波形文件
:用于导出和导入示波器的配置文件
:分别用于给波形曲线加注释,将波形拷贝为图形文件(*.png),设置FFT功能的采样参数
:用于对波形进行放大、缩小、移动
示波器
用途:可同时捕捉驱动器内部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
左侧三个输入区域分别用于:
Channels:选择希望监视的参数
Trigger:选择开始捕捉参数的触发条件
Settings:选择需要做出调整的控制环参数
8)注意观察提示信息,如果整定不能启动,有可能是参数设置不合理,不能构成一个完整的速度梯形或这有其他原因
我的仪表板
这是一个仪表板,将前面可视化和参数列表中的数据集合在一起显示和直接修改,目的是方便操作。
比较有意义的项目是Direct Access,通过输入Modbus地址的方式,可以直接读取参数值,并且参数值可以实时显示,不需要像在参数列表页面中那样需要手动刷新。
LevelH则是设置预设值
艾顿Moeller系列快速链接速度调节器198936说明书

Eaton 198936Eaton Moeller® series Rapid Link - Speed controllers, 2.4 A, 0.75 kW, Sensor input 4, Actuator output 2, PROFINET, HAN Q4/2, with braking resistanceGeneral specificationsEaton Moeller® series Rapid Link Speed controller198936157 mm270 mm 220 mm 3.45 kgRoHSIEC/EN 61800-5-1 CEUL 61800-5-1 UL approvalRASP5-2420PNT-4120100S1Product NameCatalog NumberProduct Length/Depth Product Height Product Width Product Weight Certifications Catalog Notes Model Code3 fixed speeds and 1 potentiometer speedcan be switched over from U/f to (vector) speed control Connection of supply voltage via adapter cable on round or flexible busbar junction480 VIs the panel builder's responsibility. The specifications for the switchgear must be observed.480 V AC, 3-phase400 V AC, 3-phaseMeets the product standard's requirements.0.75 kW500 VMeets the product standard's requirements.-40 °C380 VPC connectionKey switch position HANDTwo sensor inputs through M12 sockets (max. 150 mA) for quick stop and interlocked manual operationThermo-click with safe isolationSelector switch (Positions: REV - OFF - FWD)Braking resistanceKey switch position OFF/RESETControl unitBreaking resistanceIGBT inverterPTC thermistor monitoringKey switch position AUTO2 Actuator outputsInternal DC link0 Hz Configuration to Rockwell PLC for Rapid LinkGeneration Change RA-SP to RASP5Generation change from RA-MO to RAMO 4.0Generation Change RASP4 to RASP5Generation change RAMO4 to RAMO5Generation change from RA-SP to RASP 4.0Rapid Link 5 - brochureDA-SW-drivesConnectDA-SW-USB Driver DX-COM-STICK3-KITDA-SW-Driver DX-CBL-PC-3M0DA-SW-drivesConnect - installation helpDA-SW-USB Driver PC Cable DX-CBL-PC-1M5DA-SW-drivesConnect - InstallationshilfeMaterial handling applications - airports, warehouses and intra-logistics ETN.RASP5-2420PNT-4120100S1.edzIL034093ZUrasp5_v35.stpramo5_v35.dwgDA-DC-00004184.pdfDA-DC-00004514.pdfDA-DC-00003964.pdfDA-DC-00004508.pdfeaton-bus-adapter-rapidlink-speed-controller-dimensions.epseaton-bus-adapter-rapidlink-speed-controller-dimensions-002.eps eaton-bus-adapter-rapidlink-speed-controller-dimensions-004.eps eaton-bus-adapter-rapidlink-speed-controller-dimensions-003.epsMains voltage - max10.11 Short-circuit ratingRated operational voltage10.4 Clearances and creepage distancesOutput at quadratic load at rated output voltage - max Output voltage - max10.2.3.1 Verification of thermal stability of enclosures Ambient storage temperature - minMains voltage - minFitted with:Output frequency - minStarting current - max Applikasjonsmerknader BrosjyrereCAD model Installeringsinstruksjoner mCAD model SertifiseringsrapporterTegninger200 %, IH, max. starting current (High Overload), For 2 seconds every 20 seconds, Power sectionRated conditional short-circuit current (Iq)10 kAAmbient operating temperature - max40 °CCommunication interfacePROFINET, optionalAssigned motor power at 115/120 V, 60 Hz, 1-phase1 HPOutput frequency - max500 HzSwitching frequency8 kHz, 4 - 32 kHz adjustable, fPWM, Power section, Main circuitFeaturesParameterization: drivesConnect mobile (App) Parameterization: KeypadParameterization: drivesConnectParameterization: FieldbusAmbient operating temperature - min-10 °CBraking current≤ 0.6 A (max. 6 A for 120 ms), Actuator for external motor brakeNumber of HW-interfaces (serial TTY)10.6 Incorporation of switching devices and componentsDoes not apply, since the entire switchgear needs to be evaluated.Nominal output current I2N2.4 A10.2.6 Mechanical impactDoes not apply, since the entire switchgear needs to be evaluated.10.3 Degree of protection of assembliesDoes not apply, since the entire switchgear needs to be evaluated.Product categorySpeed controllerRadio interference classC1: for conducted emissions onlyC2, C3: depending on the motor cable length, the connected load, and ambient conditions. External radio interference suppression filters (optional) may be necessary.Heat dissipation capacity Pdiss0 WRated control voltage (Uc)24 V DC (-15 %/+20 %, external via AS-Interface® plug)Assigned motor power at 460/480 V, 60 Hz, 3-phase1 HPNumber of HW-interfaces (RS-422)Mains current distortion120 %ProtocolPROFINET IO10.9.2 Power-frequency electric strengthIs the panel builder's responsibility.Overvoltage categoryIIIDegree of protectionNEMA 12IP65Ambient storage temperature - max70 °CRated impulse withstand voltage (Uimp)2000 VConnectionPlug type: HAN Q4/2Overload currentFor 60 s every 600 sAt 40 °CFunctionsBrake chopper with braking resistance for dynamic braking 1 potentiometer speed4-quadrant operation possible3 fixed speedsOutput at linear load at rated output voltage - max0.75 kWMains voltage tolerance380 - 480 V (-10 %/+10 %, at 50/60 Hz)Leakage current at ground IPE - max3.5 mAConverter typeU converter10.2.2 Corrosion resistanceMeets the product standard's requirements.Supply frequency50/60 Hz10.2.4 Resistance to ultra-violet (UV) radiationMeets the product standard's requirements.10.2.7 InscriptionsMeets the product standard's requirements.Shock resistance15 g, Mechanical, According to IEC/EN 60068-2-27, 11 ms, Half-sinusoidal shock 11 ms, 1000 shocks per shaftApplication in domestic and commercial area permittedYesNumber of inputs (analog)Number of phases (output)310.12 Electromagnetic compatibilityIs the panel builder's responsibility. The specifications for the switchgear must be observed.10.2.5 LiftingDoes not apply, since the entire switchgear needs to be evaluated.Number of HW-interfaces (RS-485)1Number of HW-interfaces (industrial ethernet)Efficiency97 % (η)System configuration typePhase-earthed AC supply systems are not permitted.AC voltageCenter-point earthed star network (TN-S network)10.8 Connections for external conductorsIs the panel builder's responsibility.Switch-on threshold for the braking transistor765 VDCProtectionFinger and back-of-hand proof, Protection against direct contact (BGV A3, VBG4)Application in industrial area permittedYesClimatic proofingIn accordance with IEC/EN 50178< 95 %, no condensation10.9.3 Impulse withstand voltageIs the panel builder's responsibility.Overload current IL at 150% overload3.6 AInput current ILN at 150% overload2.5 ANumber of HW-interfaces (RS-232)Number of inputs (digital)4Current limitation0.2 - 2.4 A, motor, main circuitAdjustable, motor, main circuitCable lengthC1 ≤ 1 m, maximum motor cable lengthC3 ≤ 25 m, maximum motor cable lengthC2 ≤ 5 m, maximum motor cable length10.5 Protection against electric shockDoes not apply, since the entire switchgear needs to be evaluated.Mounting positionVerticalMains switch-on frequencyMaximum of one time every 60 seconds10.13 Mechanical functionThe device meets the requirements, provided the information in the instruction leaflet (IL) is observed.10.9.4 Testing of enclosures made of insulating materialIs the panel builder's responsibility.Heat dissipation per pole, current-dependent Pvid0 WElectromagnetic compatibility1st and 2nd environments (according to EN 61800-3)Resolution0.1 Hz (Frequency resolution, setpoint value)Assigned motor power at 460/480 V, 60 Hz1 HPRelative symmetric net voltage tolerance10 %Rated operational current (Ie)2.4 A at 150% overload (at an operating frequency of 8 kHz and an ambient air temperature of +40 °C)Number of outputs (analog)Rated operational power at 380/400 V, 50 Hz, 3-phase0.75 kWNumber of HW-interfaces (USB)Operating modePM and LSPM motorsSynchronous reluctance motorsBLDC motorsSensorless vector control (SLV)U/f controlRated frequency - min45 HzDelay time< 10 ms, On-delay< 10 ms, Off-delayNumber of outputs (digital)2Power consumption32 W10.2.3.2 Verification of resistance of insulating materials to normal heatMeets the product standard's requirements.10.2.3.3 Resist. of insul. mat. to abnormal heat/fire by internal elect. effectsMeets the product standard's requirements.Number of HW-interfaces (other)Rated frequency - max66 HzVibrationResistance: According to IEC/EN 60068-2-6Resistance: 10 - 150 Hz, Oscillation frequencyResistance: 57 Hz, Amplitude transition frequency on accelerationResistance: 6 Hz, Amplitude 0.15 mmShort-circuit protection (external output circuits)Type 1 coordination via the power bus' feeder unit, Main circuit10.7 Internal electrical circuits and connectionsIs the panel builder's responsibility.Braking torqueAdjustable to 100 % (I/Ie), DC - Main circuitRelative symmetric net frequency tolerance10 %10.10 Temperature riseThe panel builder is responsible for the temperature rise calculation. Eaton will provide heat dissipation data for the devices.Number of HW-interfaces (parallel)Assigned motor power at 230/240 V, 60 Hz, 1-phase1 HPInterfacesSpecification: S-7.4 (AS-Interface®)Number of slave addresses: 31 (AS-Interface®)Max. total power consumption from AS-Interface® power supply unit (30 V): 250 mANumber of phases (input)3Heat dissipation at current/speedEaton Corporation plc Eaton House30 Pembroke Road Dublin 4, Ireland © 2023 Eaton. Med enerett.Eaton is a registered trademark.All other trademarks are property of their respectiveowners./socialmedia27.5 W at 50% current and 90% speed 31.8 W at 100% current and 90% speed 33.5 W at 25% current and 50% speed 34.6 W at 50% current and 50% speed 35.1 W at 25% current and 0% speed 36.6 W at 100% current and 50% speed 36.8 W at 50% current and 0% speed 40.7 W at 100% current and 0% speed 2Above 1000 m with 1 % performance reduction per 100 m Max. 2000 mNumber of interfaces (PROFINET)Altitude。
LXM26-调试软件Somove使用说明

LXM26 调试软件Somove使用说明安装LXM26调试软件调试软件如果没有安装Somove,需要先安装Somove下载地址:.schneider-electric./download/WW/EN/results/3541958-SoftwareFirmware/1555898-Softw are--Released/?showAsIframe=true安装好Somove 后需要安装Lexium26 的DTM下载地址:软件注册如果尚未注册软件系统会自动提示注册,注册是免费的。
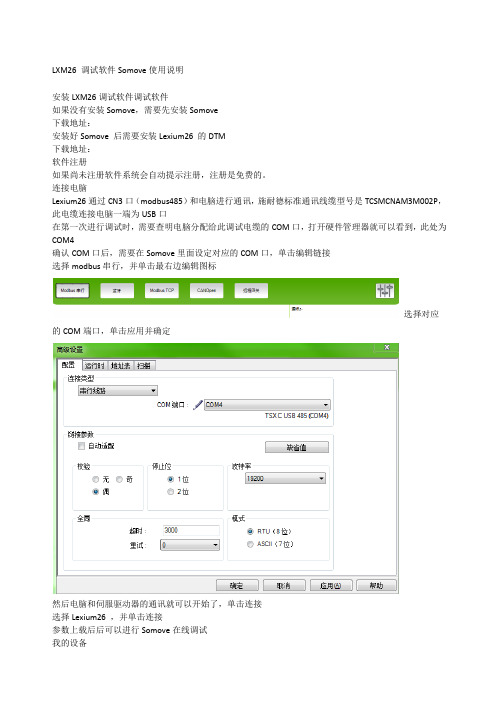
连接电脑Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4确认COM口后,需要在Somove里面设定对应的COM口,单击编辑选择modbus串行,并单击最右边编辑图标选择对应的COM端口,单击应用并确定然后电脑和伺服驱动器的通讯就可以开始了,单击连接选择Lexium26 ,并单击连接参数上载后后可以进行Somove在线调试我的设备用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括➢驱动器型号➢驱动器序列号➢驱动器固件版本➢电机型号➢驱动器额定/峰值电流➢电机额定/峰值转速➢电机额定/峰值扭矩…参数列表用于:参数列表页面用于设置驱动器P参数,可以按照P参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询用途:错误存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
可视化用途:可视化界面用于显示以下信号的状态或者数值➢数字输出/输出➢模拟量输入/输出➢指定参数的数值指定参数显示需要1.选定要显示的参数2.在右侧区域用鼠标选择显示区域用途:可同时捕捉驱动器部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
优利德 MSO7000X系列数据手册 说明书

MSO7000X 系列混合信号示波器 1MSO7000X 系列混合信号示波器10GSa/s | 2.5GHz | 1Gpts | 2,000,000wfms/s数据手册REV 2.02024年6月MSO7000X系列包含三个型号,带宽覆盖1GHz至2.5GHz,采样率高达10GSa/s,全系标配4个模拟通道,采用全新的UltraAcq®技术,实现业界领先的波形捕获率达800,000wfms/s,七合一测量仪器功能集成,为您将来的测试需求做好准备,丰富的高级测量功能助力您轻松完成复杂测试,简单易用的操作平台,使所有的不可能化为可能。
易用至臻的设计使您的体验更轻松真正为产品设计而生,全新的触控和外设交互方式,搭载15.6英寸高清电容触摸屏,深度优化的仪器控制面板,兼顾仪器属性的快捷按键,灵动多窗口布局设计,为您的波形提供最大化展示,可一次查看多个信号。
同时MSO7000X易用的WebServer远程调试能力,仅需一个仪器IP地址,您将可以使用任何舒服的姿势调试示波器。
功能丰富的测试软件加快您的设计节奏超过6种高级电源分析,加速完成电源产品的设计和验证。
超过11种行业协议分析,加速系统故障诊断和调试分析。
抖动分析和眼图测试,加速定位时钟和数据信号的抖动。
极限和标准模板测试,加速生产端来料检验。
多种独立测量仪器的功能集成,任何测量任务都能轻松应对,为您未来的测试需求做好准备。
数字示波器◼1G/2G/2.5GHz三种带宽选择◼4个模拟通道+1个外触发通道◼全系列标配10GSa/s采样率◼采用优利德独创的UltraAcq®技术,提升波形捕获率至800,000wfms/s,顺序模式达2,000,000wfms/s◼全系列标配单通道1Gpts,全通道250Mpts存储深度,更易发现波形中的细节函数/任意波形发生器(选配)◼提供等性能双通道函数/任意波形发生器◼最高输出频率高达60MHz,采样率625MSa/s◼垂直分辨率16 bits◼内置多种标准波形:正弦波、方波、脉冲波、斜波、噪声、直流。
优利德 MSO UPO2000系列编程手册 说明书
MSO/UPO2000系列可编程数字示波器REV 002023.05版权2022优利德中国科技有限公司商标信息UNI-T是优利德中国科技有限公司的注册商标。
文档编号20230530软件版本01.05.0075软件升级可能更改或增加产品功能,请关注UNI-T网站获取最新版本手册或联系UNI-T升级软件。
声明●本公司产品受中国及其它国家和地区的专利(包括已取得的和正在申请的专利)保护。
●本公司保留改变规格及价格的权利。
●本手册提供的信息取代以往出版的所有资料。
●本手册提供的信息如有变更,恕不另行通知。
●对于本手册可能包含的错误,或因手册所提供的信息及演绎的功能以及因使用本手册而导致的任何偶然或继发的损失,UNI-T概不负责。
●未经UNI-T事先书面许可,不得影印、复制或改编本手册的任何部分。
●产品认证UNI-T认证本产品符合中国国家产品标准和行业产品标准及ISO9001:2008标准和ISO14001:2004标准,并进一步认证本产品符合其它国际标准组织成员的相关标准。
SCPI(Standard Commands for Programmable Instruments,即可编程仪器标准命令集)是一种建立在现有标准IEEE 488.1和IEEE 488.2基础上,并遵循了IEEE754标准中浮点运算规则、ISO646信息交换7位编码符号(相当于ASCII编程)等多种标准的标准化仪器编程语言。
本节简介SCPI命令的格式、符号、参数和缩写规则。
指令格式SCPI命令为树状层次结构,包括多个子系统,每个子系统由一个根关键字和一个或数个层次关键字构成。
命令行通常以冒号“:”开始;关键字之间用冒号“:”分隔,关键字后面跟随可选的参数设置。
命令关键字和第一个参数之间以空格分开。
命令字符串必须以一个<换行> (<NL>) 字符结尾。
命令行后面添加问号“?”通常表示对此功能进行查询。
符号说明下面四种符号不是SCPI命令中的内容,不随命令发送,但是通常用于辅助说明命令中的参数。
优利德 MSO UPO2000系列示波器 说明书
MSO/UPO2000系列示波器使用手册REV32023.11尊敬的用户:您好!感谢您选购全新的优利德仪器,为了正确使用本仪器,请您在本仪器使用之前仔细阅读本说明书全文,特别有关“安全注意事项”的部分。
如果您已经阅读完本说明书全文,建议您将此说明书进行妥善的保管,与仪器一同放置或者放在您随时可以查阅的地方,以便在将来的使用过程中进行查阅。
优利德科技(中国)股份有限公司版权所有。
如果原购买者自购买该产品之日起一年内,将该产品出售或转让给第三方,则保修期应为自原购买者从UNI-T或授权的UNI-T分销商购买该产品之日起一年内。
探头及其他附件和保险丝等不受此保证的保护。
如果在适用的保修期内证明产品有缺陷,UNI-T可自行决定是修复有缺陷的产品且不收部件和人工费用,或用同等产品(由UNI-T决定)更换有缺陷的产品。
UNI-T作保修用途的部件、模块和更换产品可能是全新的,或者经修理具有相当于新产品的性能。
所有更换的部件、模块和产品将成为UNI-T的财产。
以下提到的“客户”是指据声明本保证所规定权利的个人或实体。
为获得本保证承诺的服务,“客户”必须在适用的保修期内向UNI-T通报缺陷,并为服务的履行做适当安排。
客户应负责将有缺陷的产品装箱并运送到UNI-T指定的维修中心,同时预付运费并提供原购买者的购买证明副本。
如果产品要运送到UNI-T 维修中心所在国范围内的地点,UNI-T应支付向客户送返产品的费用。
如果产品送返到任何其他地点,客户应负责支付所有的运费、关税、税金及任何其他费用。
本保证不适用于由于意外、机器部件的正常磨损、在产品规定的范围之外使用或使用不当或者维护保养不当或不足而造成的任何缺陷、故障或损坏。
UNI-T根据本保证的规定无义务提供以下服务:a)修理由非UNI-T服务代表人员对产品进行安装、修理或维护所导致的损坏;b)修理由于使用不当或与不兼容的设备连接造成的损坏;c)修理由于使用不符合本说明书要求的电源而造成的任何损坏或故障;d)维修已改动或者与其他产品集成的产品(如果这种改动或集成会增加产品维修的时间或难度)。
simrad evo3s mpu操作手册说明书
序言 | NSO evo3S MPU 操作员手册
5
目录
11 简介 11 系统概述 11 操作系统 11 主页 13 应用程序页面 14 读卡器 14 USB 端口
15 基本操作 15 打开和关闭系统 15 “系统控制”对话框 16 屏幕捕获
17 自定义您的系统 17 自定义主页壁纸 17 定制长按功能 17 多面板页面 17 自定义收藏页面 18 自定义仪表栏 19 调整多面板页面拆分 20 启用或禁用功能 20 密码保护 20 功能解锁 20 船桥控制
86 启用和断开自动舵 86 自动舵指示 86 自动舵模式 90 操作专业自动舵系统 91 自动舵设置
94 拖弋马达自动舵 94 安全操作自动舵 94 选择活动自动舵 94 拖弋马达的自动舵控制器 95 启用和断开自动舵 95 自动舵指示 95 自动舵模式 97 拖弋马达速度控制 98 记录和保存航迹 98 自动舵设置
警告: 在需要警告人员谨慎前行时使用,以免受伤和/或对设备/人 员造成伤害。
手册版本 本手册是针对软件版本 19.3 而编写的。本手册会不断更新,以确保内容与新软件版 本保持一致。您可以从以下网站下载最新的可用手册版本: •
翻译版手册 可从以下网站找到本手册的可用翻译版本: •
45 雷达 45 关于雷达 45 “雷达”面板 45 双雷达 45 雷达叠加 46 雷达操作模式 46 雷达范围 46 雷达盲区 47 调整雷达图像 48 在雷达面板上使用光标 48 高级雷达选项 49 雷达视图选项 52 EBL/VRM 标记 52 在您船舶周围设置警戒区 53 MARPA 目标 54 记录雷达数据 54 雷达设置
目录 | NSO evo3S MPU 操作员手册
7
69 SideScan 69 关于 SideScan 69 SideScan 面板 69 缩放图像 69 在面板上使用光标 69 查看历史记录 69 记录 SideScan 数据 69 设置图像 70 高级选项 71 更多选项 71 测深仪设置
优利德 MSO7000X系列使用手册 说明书
MSO7000X系列混合信号示波器10GSa/s | 2.5GHz | 1Gpts | 2,000,000wfms/s用户手册REV.2.0目录引言 (6)版权信息 (6)商标信息 (6)文档版本 (7)声明 (7)安全要求 (7)环境要求 (10)连接电源 (10)静电防护 (11)文档格式约定 (11)MSO7000X系列混合信号示波器简介 (12)主要特色 (13)1 入门指南 (14)1.1 一般性检查 (14)1.2 使用前准备 (14)1.3 外观尺寸 (16)1.4 前面板介绍 (17)1.5 后面板介绍 (18)1.6 操作面板功能概述 (19)1.7 用户界面介绍 (22)1.8 触摸屏操作 (25)1.9 虚拟键盘 (26)1.10 数字键盘 (27)2 设置垂直系统 (28)2.1 打开/选中/关闭模拟通道 (28)2.2 通道耦合 (29)2.3 带宽限制 (29)2.4 设置垂直档位 (29)2.5 设置垂直位置 (30)2.6 设置偏置电压 (31)2.7 设置单位 (31)2.8 反相 (31)2.9 标签 (31)2.10 调整探头倍率 (32)2.11 多窗口显示 (32)2.12 设置通道延迟 (33)3 设置水平系统 (34)3.1 水平档位 (34)3.2 水平延迟 (34)3.3 Roll滚动模式 (35)4 设置采样系统 (36)4.1 采样率 (36)4.2 采集模式 (38)4.3 存储深度 (40)4.4 ERes (41)5 设置触发系统 (42)5.1 触发系统名词介绍 (42)5.2 边沿触发 (44)5.3 脉宽触发 (45)5.4 视频触发 (46)5.5 斜率触发 (47)5.6 欠幅触发 (48)5.7 延时触发 (49)5.8 超时触发 (50)5.9 持续时间触发 (51)5.10 建立保持触发 (52)5.11 N边沿 (53)5.12 码型 (54)5.13 串行 (54)5.14 区域触发 (66)6 协议解码(选配) (68)6.1 RS232 (68)6.2 I2C (70)6.3 SPI (72)6.4 CAN (74)6.5 CAN-FD (77)6.6 LIN (78)6.7 FlexRay (80)6.8 AudioBus (81)6.9 MIL-STD-1553 (84)6.10 ARINC429 (86)6.11 SENT (88)7 自动测量 (91)7.1 参数测量介绍 (91)7.3 添加测量参数 (95)7.4 测量统计 (95)7.5 测量门限 (96)8 光标测量 (97)8.1 时域光标 (98)8.2 频域光标 (98)9 数学运算 (100)9.1 基本运算 (100)9.2 FFT (100)9.3 滤波 (103)9.4 ERes (107)9.5高级运算 (108)9.6自定义运算 (109)10 参考波形 (112)10.1 打开Ref功能 (112)10.2 调节Ref波形 (112)10.3 关闭参考波形 (113)11 通过/失败测试 (114)11.1 极限测试 (114)11.2 标准测试模板 (115)12 数字通道(选配) (117)12.1 打开/关闭数字通道 (117)12.2 选择逻辑通道 (118)12.3 设置波形大小 (118)12.4 设置阈值电平 (118)13 数字电压表和频率计 (120)13.1 数字电压表 (120)13.2 频率计 (120)14 电源分析(选配) (121)14.1 电源质量分析 (122)14.2 谐波分析 (125)14.3 纹波分析 (126)14.4 开关损耗 (128)14.5 安全工作区 (129)14.6 环路分析 (131)15 抖动分析和眼图(选配) (133)15.1 眼图 (133)15.3 抖动分析 (136)15.4 时钟恢复 (139)15.5 抖动的分解 (139)15.6 抖动测量参数 (140)15.7 测试系统对抖动测试的影响 (140)16 顺序模式 (142)16.1 顺序模式设置 (142)16.2 单帧模式 (143)16.3 连续帧模式 (144)17 XY模式 (146)18 直方图 (150)18.1统计直方图 (150)18.2区域直方图 (152)19 函数/任意波形发生器(选配) (154)19.1 打开和关闭函数/任意波形发生器 (154)19.2 输出连续波信号 (155)19.3 输出调制信号 (158)19.4 输出扫频信号 (161)20 搜索与导航 (162)21 窗口显示设置 (165)21.1 标记显示设置 (165)21.2 余辉 (166)21.3 网格样式 (166)21.4 波形样式 (168)21.5 亮度调节 (168)22 存储与打印 (169)22.1 波形存储和回调 (169)22.2 屏幕图像存储 (170)22.3 存储设置与读取 (172)22.4 外部存储和加载 (173)22.5 数据导出 (174)23 系统功能设置 (175)23.1 显示设置 (175)23.2 自动设置与校准 (175)23.3 通信 (176)23.4 辅助输入与输出 (177)23.5 其它 (178)24 远程控制 (189)24.1 用户自定义编程 (189)24.2 PC软件控制 (189)24.3 WebServer远程控制 (190)25 故障分析 (193)26 附录 (194)26.1 附录A 附件和选件 (194)26.2 附录B 保养和清洁维护 (197)26.3 附录C 保修概要 (197)26.4 附录D 联系我们 (197)引言本用户手册包括 MSO7000X系列示波器有关的重要的安全和安装信息,并包括示波器的基本操作和使用教程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L M调试软件S o m o v e使
用说明精编
Document number:WTT-LKK-GBB-08921-EIGG-22986
LXM26 调试软件Somove使用说明
安装LXM26调试软件调试软件
如果没有安装Somove,需要先安装Somove
下载地址:安装好Somove 后需要安装Lexium26 的DTM
下载地址:
软件注册
如果尚未注册软件系统会自动提示注册,注册是免费的。
连接电脑
Lexium26通过CN3口(modbus485)和电脑进行通讯,施耐德标准通讯线缆型号是TCSMCNAM3M002P,此电缆连接电脑一端为USB口
在第一次进行调试时,需要查明电脑分配给此调试电缆的COM口,打开硬件管理器就可以看到,此处为COM4
确认COM口后,需要在Somove里面设定对应的COM口,单击编辑链接
选择modbus串行,并单击最右边编辑图标
选择对应的COM端口,单击应用并确定
然后电脑和伺服驱动器的通讯就可以开始了,单击连接
选择Lexium26 ,并单击连接
参数上载后后可以进行Somove在线调试
我的设备
用途:我的设备页面用于显示伺服驱动器和电机的基本信息,包括
驱动器型号
驱动器序列号
驱动器固件版本
电机型号
驱动器额定/峰值电流
电机额定/峰值转速
电机额定/峰值扭矩
…
参数列表
用于:参数列表页面用于设置驱动器P参数,可以按照P 参数组开设置,也可以按照操作模式来设置。
相关参数说明可以在Lexium26手册第九章查询
错误内存
用途:错误内存界面用来查看伺服的故障历史,可以显示当前故障,已经5次历史故障,并且指明故障原因和处理方式。
用途:可视化界面用于显示以下信号的状态或者数值数字输出/输出
模拟量输入/输出
指定参数的数值
指定参数显示需要
1.选定要显示的参数
2.在右侧区域用鼠标选择显示区域
用途:可同时捕捉驱动器内部的最多4个变量,例如电流、电压、位置误差、实际速度等,并绘制成以时间为横坐标的曲线图,以此观察驱动器及电机的运行性能是否符合要求,并相应的做出控制环参数调整。
左侧三个输入区域分别用于:
Channels:选择希望监视的参数
Trigger:选择开始捕捉参数的触发条件
Settings:选择需要做出调整的控制环参数
这三个输入区域可以分别用右侧示波器栏顶部的三个按钮打开
这是右侧示波器栏顶部的一排按钮,它们的功能是这样的:
:用于打开和关闭左侧三个输入区域
:用于加载和保存捕捉到的波形文件
:用于导出和导入示波器的配置文件
:分别用于给波形曲线加注释,将波形拷贝为图形文件(*.png),设置FFT功能的采样参数
:用于对波形进行放大、缩小、移动
:分别用于在波形上加两个光标以准确读出光标点的数值,在示波器上显示波形名称样例,对波形进行FFT
转换观察频域分布
示波器的一般使用顺序为:
1.在左边第一个输入区域中选择希望捕捉的参数:
1)按打开可以捕捉的参数列表,示波器同时最多捕捉
4个参数
其中可捕捉的参数都在列表的RAM栏目内
按可以单独更改希望捕捉的参数
按可以删除不想捕捉的参数
2)选择好参数后要设置参数的采样条件,按Sampling打
开下拉列表,
可以设置参数的采样点数和采样时间间隔。
它们决定了整个采集时间段的长度以及转换到频域显示时的最高频率。
2.在左边第二个输入区域中选择触发条件
示波器不能连续采集数据,它只能采集从某个触发条件开始后一定时间内的数据。
这个条件可以是某个参数值达到预设数值,例如电机指令速度大于5rpm时开始采集数据。
1)首先选择触发模式是普通模式还是专家模式。
普通模式仅能选择触发条件是哪个参数,专家模式可以设置更多条件,例如多捕捉触发点时刻之前的一些数据,以保证图形的完整度。
一般建议使用专家模式。
2)按打开可以设置为条件的参数列表:
其中可设置为触发条件的参数都在列表的RAM栏目内按可以单独更改设置为条件的参数
按可以删除触发条件参数
3)在专家设置页面中,以电机收到的指令速度为例:
Delay栏中可以设置数据保存开始时间,在触发点时
刻往前后往后若干个采样周期。
一般常用为正数个SamplingRate,这样可以在多采集触发点之前的数据,保持波形的完整性。
Type栏中可以设置触发条件是参数值增大到超过预设值或者减小到小于预设值,例如说此处选择GrowingEdge,表示当指令速度增加到超过预设值时为采集触发点
LevelH则是设置预设值
此处综合看,触发条件为:当电机收到的指令转速增加到超过10rpm时刻的前5个采样时间周期,开始采样数据。
3.在左边第三个输入栏中选择希望直接更改的控制环参
数。
这里实际上是把参数列表中的驱动器参数列了出来,方便直接更改而不用切换到参数列表栏。
1)按打开可以更改的参数列表:
其中可更改的驱动器参数都在列表的EEPROM栏目内
按可以单独更改选择的驱动器参数
按可以删除选择的驱动器参数
2)选择出的参数会列在输入区域内,可以直接更改参数
名后面的数值
4.在设置好示波器之后,按右边示波器栏上方
中的绿色三角按钮,等待后方Stopped显示为,表示示波器已经
准备完毕,并且在等待左边第二栏中设置的触发条件满足时,立即开始数据的捕捉和采集。
5.数据采集完毕后,等待从驱动器中上载完毕,绘制在示
波器栏中
6.此时可以继续使用示波器顶部的按钮进行分析,例如放
大缩小局部图形,添加光标观察,进行FFT转换等,以及保存图形文件,方便下次导入进行分析。
调试
Somove提供两种方式的自整定,分别是简单自整定和舒适自整定。
连接上驱动器,并且获得驱动器的控制权之后,进入调试页面可以看到这两种整定模式。
简单自整定/EasyTuning:
1)选择Easy按钮
2)直接点击下方控制面板的Start/启动按钮即可开始简
单自整定
舒适自整定/ComfortTuning:
1)选择Comfort按钮
2)舒适自整定/ComfortTuning需要设置整定运动的各项
参数
需要注意的是,设置的运动参数必须合理,能构成一个完整的速度梯形
1)P9-20 选择整定方向是单向运动或者来回运动
2)P9-26 设置整定的运动距离,这个值设置好之后会
自动复制到P9-27中,如果P9-20设置成来回运
动,则P9-27值是P9-26值的负数,如果P9-20设
置成单向运动,则P9-27值和P9-26相等
3)P9-31设置运动的加减速度,其中AAAA中设置加时
间,BBBB中设置减速时间
4)P9-32设置运动的速度,其中AAAA中设置正向运动
速度,BBBB中设置反向运动速度
5)P2-32选择自整定趋向是最小超调还是最短稳态时
间,以及是否自动测量并抑制振动
6)自整定还可以自己测量加速度前馈,但是需要在参
数列表中将P9-36设置为1
7)设置完成后,点击下方控制面板的Start/启动按钮
即可开始舒适自整定
8)注意观察提示信息,如果整定不能启动,有可能是
参数设置不合理,不能构成一个完整的速度梯形或
这有其他原因
我的仪表板
这是一个仪表板,将前面可视化和参数列表中的数据集合在一起显示和直接修改,目的是方便操作。
比较有意义的项目是Direct Access,通过输入Modbus地址的方式,可以直接读取参数值,并且参数值可以实时显示,不需要像在参数列表页面中那样需要手动刷新。
1)从参数列表中查找参数的Modbus地址
2)按Read可以直接读取参数名称及参数值
3)按Visualize可以将参数加入观察列表,实时观察参
数值变化。