一种递归模糊神经网络自适应控制方法
模糊系统的辨识与自适应控制
模糊系统的辨识与自适应控制在现代控制理论研究中,模糊控制是一种重要的控制方法。
模糊控制是对非线性系统的一种解决方案,这种控制方法利用模糊逻辑来处理不确定性和信息丢失问题,从而提高了控制的效率和精度,因此在自适应控制中得到了广泛的应用。
一、模糊系统辨识模糊系统辨识是指对模糊控制系统进行参数辨识和模型识别,目的是为了找到最佳的控制方案。
模糊系统的辨识过程也是确定模糊控制系统结构和参数的过程。
模糊控制系统需要依赖于模糊规则库和隶属函数来完成参数辨识和模型识别。
模糊规则库是一个包含了各种规则的数据库,其中每个规则由一组条件和一组相应的控制动作组成。
隶属函数用来描述输入变量和输出变量之间的映射关系。
在模糊系统辨识的过程中,需要收集大量的数据来分析和处理,以便从中提取有用的信息。
这里的数据包括输入数据和输出数据,输入数据包括控制输入和环境输入,输出数据包括控制输出和系统响应。
通过对这些数据进行分析、模型识别和参数辨识,可以得到一个模糊控制系统的模型,并对其进行优化调整,以使其更好地适应所需的控制任务。
二、自适应控制模糊系统的自适应控制是利用模糊控制系统的动态特性,不断根据控制系统的变化自动调整控制参数,以达到最优的控制效果。
因此,自适应控制算法是一种重要的控制算法,它可以自动调整控制参数以快速响应外部变化。
自适应控制有多种方法,包括自适应模糊控制、自适应神经网络控制、自适应PID控制、自适应模型预测控制等。
其中,自适应模糊控制是一种广泛应用的控制方法,它可以自动调整模糊规则库、隶属函数以及控制输出,以适应不同的控制任务和环境条件。
三、结论总之,在现代控制领域中,模糊控制方法是一种重要的控制方法之一,具有较高的鲁棒性和鲁棒性。
模糊控制方法除了能够处理非线性系统,还可以处理模糊系统,因此在实际控制中被广泛应用。
模糊系统的辨识和自适应控制是模糊控制方法的两个基本方面,它们为模糊控制的优化和应用提供了基础和保障。
一种基于神经网络的快速回馈递推自适应控制
界, 跟踪 误 差 指 数 收 敛 到 有 界 紧 集 内 。最 后 进 行 了空 天 飞 行 器 飞 行 控 制 系 统 设 计 , 在 高 超 声 速 的 条 件 下 对 其 进 并
1 问题 陈 述
复杂性 。针 对不 确定非线 性 系统 , 文献 [ ] 行 了 8进
自适应 D C的研 究 S
考虑 如下严 格反馈 不确 定非线 性 系统 :
:
( ) ) l 2≤ i< n +g( + +△ , ( )+g ( H +A X )
系统 的状态变 量 及 隐层 神 经 元 的个 数为 多少 , 线 在
调整 的 自适应 参 数仅 为子 系 统个 数 , 因而 算法 的计 算效率 高 , 于 工 程实 现 。对 空 天飞 行 器 的高 超 声 便
速飞行 控制仿 真结 果表 明该方 法在 降低控 制器 复杂
性 的同时仍 具有 较好 的动态 特性及 鲁棒性 。
第2 9卷第 6期
20 0 8年 I 1月
宇 航 学 报
J u n io t n uis o r a fAsr a t o c
Vo . 9 12
N0 6
.
No e e 2 08 v mb r 0
一
种基 于神 经 网络 的快 速 回馈 递 推 自适应 控 制
周 丽 ,姜 长 生 ,钱 承 山
行 了仿 真 验 证 , 果 表 明 了该 方 法 的 有 效 性 。 结 关 键 词 :鲁 棒 自适 应 控 制 ; 回馈 递 推 ;动 态 面 控 制 ;R F神 经 网络 ;空 天 飞 行器 B
智能控制题目及解答
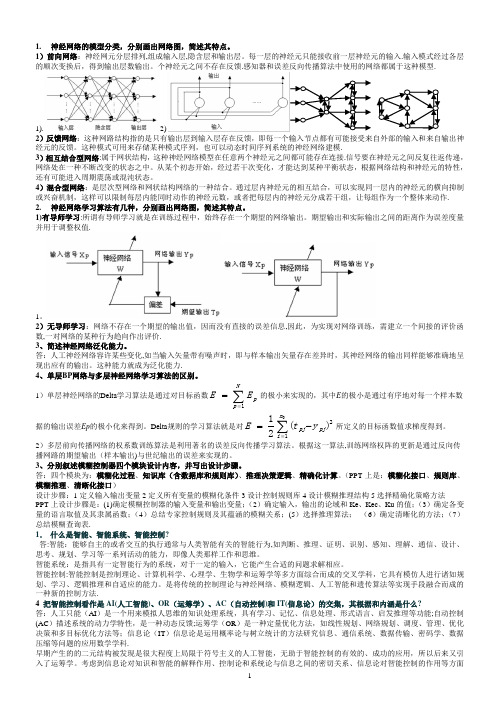
1. 神经网络的模型分类,分别画出网络图,简述其特点。
1)前向网络:神经网元分层排列,组成输入层,隐含层和输出层。
每一层的神经元只能接收前一层神经元的输入.输入模式经过各层的顺次变换后,得到输出层数输出。
个神经元之间不存在反馈.感知器和误差反向传播算法中使用的网络都属于这种模型.1).2)2)反馈网络:这种网路结构指的是只有输出层到输入层存在反馈,即每一个输入节点都有可能接受来自外部的输入和来自输出神经元的反馈。
这种模式可用来存储某种模式序列,也可以动态时间序列系统的神经网络建模.3)相互结合型网络:属于网状结构,这种神经网络模型在任意两个神经元之间都可能存在连接.信号要在神经元之间反复往返传递,网络处在一种不断改变的状态之中。
从某个初态开始,经过若干次变化,才能达到某种平衡状态,根据网络结构和神经元的特性,还有可能进入周期震荡或混沌状态。
4)混合型网络:是层次型网络和网状结构网络的一种结合。
通过层内神经元的相互结合,可以实现同一层内的神经元的横向抑制或兴奋机制,这样可以限制每层内能同时动作的神经元数,或者把每层内的神经元分成若干组,让每组作为一个整体来动作. 2. 神经网络学习算法有几种,分别画出网络图,简述其特点。
1)有导师学习:所谓有导师学习就是在训练过程中,始终存在一个期望的网络输出。
期望输出和实际输出之间的距离作为误差度量并用于调整权值.1。
2)无导师学习:网络不存在一个期望的输出值,因而没有直接的误差信息,因此,为实现对网络训练,需建立一个间接的评价函数,一对网络的某种行为趋向作出评价. 3、简述神经网络泛化能力。
答:人工神经网络容许某些变化,如当输入矢量带有噪声时,即与样本输出矢量存在差异时,其神经网络的输出同样能够准确地呈现出应有的输出。
这种能力就成为泛化能力.4、单层BP 网络与多层神经网络学习算法的区别。
1)单层神经网络的Delta 学习算法是通过对目标函数∑==Npp E E1的极小来实现的,其中E 的极小是通过有序地对每一个样本数据的输出误差Ep 的极小化来得到。
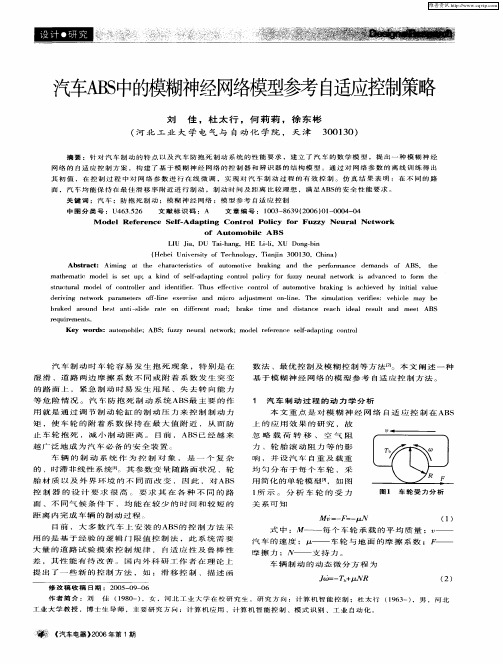
汽车ABS中的模糊神经网络模型参考自适应控制策略
的 路 面 上 , 紧 急 制 动 时 易 发 生 甩 尾 、 失 去 转 向 能 力
数 法 、最 优 控 制 及 模 糊 控 制 等 方 法 。 本 文 阐 述 一 种 基 于 模 糊 神 经 网 络 的 模 型 参 考 自适 应 控 制 方 法 。
s r t a mo l f c to l r n i n i e . Th e f ctv c nto o ut mot e tuc ur l de o on r le a d de tf r i us fe i e o r l f a o i br i g s c i v d y ni a v l v ak n i a h e e b i t l a ue i
r quie e s e r m nt .
K e wor : a t m o l ; ABS;f z y e a n t r ; mo l e e e c s l- da i g o tol y  ̄ uo bi e u z n ur l e wo k de r f r n e e f a ptn c n r
关 键 词 : 汽 车 ; 防 抱 死 制 动 ;模 糊 神 经 网 络 ; 模 型 参 考 自 适 应 控 制
中 图 分 类 号 : U 6 .2 4 35 6 文 献 标 识 码 :A 文 章 编 号 : 1 x3 8 3 2 x6))一 0 4 0 【 】 — 6 9( 【 】 【l 0 0 — 4
1 汽 车 制 动 过 程 的 动 力 学 分 析 本 文 重 点 是 对 模 糊 神 经 网 络 自 适 应 控 制 在 AB S
模糊控制与神经网络控制

模糊控制与神经网络控制模糊控制和神经网络控制是现代控制领域中的两个重要研究方向,它们通过不同的方法和理论来解决复杂系统的控制问题。
本文将就这两种控制方法进行介绍和对比,并探讨它们在实际应用中的优劣势。
一、模糊控制模糊控制是一种基于模糊逻辑理论的控制方法,它通过将输入和输出之间的关系进行模糊化来实现系统的控制。
模糊控制器的设计通常包括模糊化、规则库的建立、推理机制以及解模糊化等步骤。
在模糊控制中,输入和输出以模糊集形式表示,通过一系列的模糊规则进行推理得到控制信号。
模糊规则库中存储了专家知识,根据实际问题的需求可以设计不同的规则。
推理机制使用模糊规则进行推理,最后通过解模糊化将模糊输出转化为具体的控制量。
模糊控制的优点之一是适用于非线性和不确定性系统,它能够通过模糊化处理来处理实际系统中的不确定性和模糊性。
此外,模糊控制能够利用专家经验进行控制器的设计,无需准确的系统数学模型。
然而,模糊控制也存在一些局限性。
首先,模糊控制的规则库和参数通常需要由专家进行手动设计,这对专家的经验和知识有一定的要求。
其次,模糊控制的性能也会受到模糊规则的数量和质量的影响,如果规则库设计不当,控制性能可能无法满足要求。
二、神经网络控制神经网络控制是一种基于人工神经网络的控制方法,它通过将系统模型表示为神经网络结构来实现控制。
神经网络是一种模仿生物神经系统结构和功能的计算模型,具有自适应学习和适应性处理的能力。
在神经网络控制中,神经网络被用作控制器来学习系统的映射关系。
通过输入和输出的样本数据,神经网络根据误差信号不断调整权重和阈值,使得输出逼近于期望输出。
神经网络控制通常包括网络的结构设计、学习算法的选择和参数调整等步骤。
与模糊控制相比,神经网络控制具有更好的自适应性和学习能力。
它能够通过学习过程来建立系统的非线性映射关系,并且对于未知系统具有较好的鲁棒性。
此外,神经网络控制不需要准确的系统模型,对系统的数学模型要求相对较低。
移动机器人编队的递归模糊神经网络滑模控制
c a s e o f ma i n t a i n i n g f o ma r t i o n .T h e s t a b i l i t y o f t h e c o n t r o l s y s t e m wa s p r o v e d b y u s i n g t h e L y a p u n o v t h e o r y .T h e s i mu —
p a r t o f d y n a mi c s n o n l i n e a r u n c e r t a i n o f f o l l o w e r a n d l e a d e r r o b o t ,a n d t h e a d a p t i v e r o b u s t c o n t r o l l e r c o mp e n s a t e d
LI Ya n-d o n g, ZHU L i n g, S UN Mi n g
( C o l l e g e o f C o mp u t e r a n d C o n t r o l E n g i n e e r i n g , Q i q i h a r U n i v e r s i t y ,Q i q i h a r H e i l o n g j i a n g 1 6 1 0 0 6 , C h i n a )
智能家居中的自适应控制算法
智能家居中的自适应控制算法随着人工智能技术的不断发展,智能家居也越来越普及。
它不仅能够提高家居的舒适性和便捷性,还能够降低能源和资源的消耗,为人们带来更加可持续的生活方式。
智能家居中的一个关键技术就是自适应控制算法。
自适应控制算法是指能够根据控制对象和环境的变化来自我调整的控制算法。
在智能家居中,自适应控制算法可以根据家庭成员的需求和行为习惯来自动调整家居设备的工作模式和能耗,使家居更加智能、节能和环保。
智能家居中常用的自适应控制算法有以下几种:一、模糊控制算法模糊控制算法是利用模糊逻辑原理对复杂系统进行自适应控制的一种方法。
它可以将人类的认知方式(如模糊思维)转换为数学逻辑,实现对系统的自适应控制。
在智能家居中,模糊控制算法可以根据家庭成员的需求和环境变化来自动调整房间温度、空调风速等参数,提高家居的舒适性和节能性。
二、神经网络控制算法神经网络控制算法是利用人工神经网络模拟人脑神经元进行自适应控制的一种方法。
它可以根据输入信号来自动调整神经网络的权值和阈值,实现对系统的自适应控制。
在智能家居中,神经网络控制算法可以根据家庭成员的行为习惯和生理特征来自动调整照明、音响和净化器等设备的工作模式和能耗,提高家庭的智能化程度和节能效率。
三、遗传算法控制算法遗传算法控制算法是通过模拟遗传、变异和选择等自然遗传过程来进行自适应控制的一种方法。
它可以通过对不同控制策略的交叉和变异,让系统在不断优化中实现更好的控制效果。
在智能家居中,遗传算法控制算法可以根据家庭成员的需求和环境变化来调整家居设备的能耗和工作模式,提高家庭的舒适性和节能效率。
总结智能家居中的自适应控制算法可以根据家庭成员的需求和环境变化来自动调整家居设备的工作模式和能耗,提高家居的智能化、节能性和环保性。
当前,随着人工智能技术的不断发展,自适应控制算法将在智能家居领域发挥越来越重要的作用,为人们带来更加智能、舒适、便捷和环保的生活方式。
基于自适应神经模糊推理系统的智能化控制技术研究
基于自适应神经模糊推理系统的智能化控制技术研究随着科技的快速发展,智能化控制技术得到了广泛应用并取得了显著的成果。
在传统的控制方法基础上,自适应神经模糊推理系统(ANFIS)作为一种新型的控制方法,已经被广泛研究和应用于工业生产、汽车、机器人等领域,取得了良好的效果。
本文主要介绍ANFIS的原理及应用,探讨其在智能化控制中的优势和发展前景。
一、ANFIS的原理ANFIS是一种由模糊理论和神经网络理论相结合的自适应智能控制算法。
模糊推理是一种可以模拟人类语言思维的方法,适用于处理模糊信息和非线性问题;神经网络是一种能够自我学习和优化的计算模型,适用于处理复杂数据和高维空间的问题。
这两种计算模型的结合,使得ANFIS可以有效处理多变量、非线性、误差较大的复杂控制问题。
ANFIS的核心是基于模糊推理的自适应调节机制。
在ANFIS系统中,通过对已知输入输出样本进行学习和训练,建立输入变量与输出变量之间的映射关系,并确定各个输入变量的权值和模糊集隶属度函数。
这些权值和函数随着学习的进行实现自适应调节,从而达到更加精确和准确的输出结果。
二、ANFIS的应用ANFIS在智能化控制领域的应用广泛,例如:1. 工业生产控制ANFIS可以应用于流程控制、生产优化、质量控制等多个领域,提高工业生产的效率和质量。
例如在钢铁生产中,利用ANFIS控制系统对生产过程的影响进行分析和优化,可以降低烧结温度、减少气体排放,从而减轻环境污染。
2. 汽车控制ANFIS在汽车动力控制、防抱死制动系统、车身稳定控制等方面的应用,可以提高车辆的行驶稳定性和安全性。
例如,在雪地、湿滑路面行驶时,利用ANFIS控制系统对车速、刹车压力等参数进行实时控制,保证车辆行驶稳定、操控性安全。
3. 机器人控制ANFIS在机器人的控制、路径规划、姿态控制等领域应用广泛,提高了机器人的自主性和智能化水平。
例如,在机器人视觉系统中,利用ANFIS对图像识别和目标追踪进行优化,可以实现机器人的自主导航和操控。
模糊控制系统的自适应性及稳定性分析
模糊控制系统的自适应性及稳定性分析第一章引言1.1 研究背景模糊控制系统是一种应用广泛且灵活的控制方法,用于处理复杂、非线性、模糊和不确定的系统。
它能够通过模糊推理和模糊逻辑来处理输入和输出之间的模糊关系,从而实现系统的自适应性。
然而,模糊控制系统的自适应性和稳定性是该领域的热点和难点问题,需要进行深入的研究和分析。
1.2 研究目的本文旨在分析模糊控制系统的自适应性及稳定性,探讨现有方法在解决这些问题上的局限性,并提出改进的方法和思路,以提高模糊控制系统的性能和稳定性。
第二章模糊控制系统的自适应性分析2.1 模糊控制系统的基本原理模糊控制系统由模糊化、规则库、模糊推理和去模糊化四个组成部分构成。
它通过将模糊规则映射到控制行为上,实现对输入输出的模糊处理和控制。
然而,传统的模糊控制系统在面对未知系统和参数变化时,往往难以自适应地调整控制策略,导致性能下降。
2.2 模糊控制系统的自适应方法为了提高模糊控制系统的自适应性,研究者们提出了许多方法。
其中一种常用的方法是基于模糊神经网络的自适应控制方法。
该方法将模糊控制系统与神经网络相结合,利用神经网络的学习能力来自动调整控制器的参数。
此外,还有一些模型参考自适应控制方法和基于遗传算法的自适应方法等。
2.3 模糊控制系统的自适应性分析虽然存在多种自适应方法,但是模糊控制系统的自适应性仍然存在一些问题。
首先,自适应方法通常需要大量的训练数据和计算资源,增加了计算复杂度和成本。
其次,自适应过程可能会受到系统噪声和不确定性的干扰,导致控制系统性能下降。
第三章模糊控制系统的稳定性分析3.1 模糊控制系统的稳定性定义模糊控制系统的稳定性是指系统在面对扰动和参数变化时,保持输出稳定且不产生不良反应的能力。
稳定性是一个重要的性能指标,关系到系统的安全性和可靠性。
3.2 稳定性分析的方法和指标稳定性分析主要通过系统的频率响应和极点分布等方法进行。
常用的稳定性指标有相角裕度、增益裕度和Nyquist曲线等。
基于神经网络的自适应控制算法研究
基于神经网络的自适应控制算法研究引言:随着科技的不断进步和发展,神经网络在控制领域的应用越来越广泛。
神经网络具有自学习、自适应的特性,因此被广泛应用于各种控制系统中。
本文将探讨基于神经网络的自适应控制算法的研究现状以及相关的理论基础和实际应用情况。
1. 神经网络基本原理神经网络是一种模拟人脑神经细胞的网络模型,它由一个大量相互连接的神经元组成。
神经网络具有并行处理、自适应学习和容错能力等特性,能够对复杂的非线性关系进行建模和处理。
2. 自适应控制算法的理论基础自适应控制算法是基于神经网络的控制方法之一。
它通过不断调整控制器的参数,实现对系统的自适应调节。
自适应控制算法的理论基础主要包括模型参考自适应控制和直接自适应控制两种方法。
2.1 模型参考自适应控制模型参考自适应控制是一种基于模型的控制方法。
它通过建立系统的数学模型,并与系统的实际输出进行比较,不断调整控制器参数以减小误差。
神经网络被应用于模型参考自适应控制中,用于对系统模型进行建模和优化。
2.2 直接自适应控制直接自适应控制是一种无需系统模型的控制方法。
它仅通过反馈系统的实际输出进行控制。
神经网络在直接自适应控制中的应用主要是通过学习系统的输入输出映射关系,实现对系统的预测和调节。
3. 基于神经网络的自适应控制算法的研究现状基于神经网络的自适应控制算法是一个非常活跃的研究领域。
研究者们提出了许多基于神经网络的自适应控制算法,并应用于各个领域。
3.1 基于反向传播算法的神经网络控制反向传播算法是一种常用的神经网络训练算法。
在控制中,反向传播算法可以应用于神经网络的训练和控制参数的调整。
3.2 基于强化学习的自适应控制强化学习是一种通过试错学习的方法。
在自适应控制中,基于强化学习的方法可以通过不断尝试和调整,实现对系统控制的优化。
4. 基于神经网络的自适应控制算法的实际应用基于神经网络的自适应控制算法在许多实际应用中都取得了良好的效果。
4.1 机器人控制神经网络的自适应控制算法在机器人控制中具有重要的应用价值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
义 ,从而可以很容易地确定网络的结构和神经元的参数. 本文构造了一种 RFNN ,在所设计的网络中 ,通过在网络
定义为 :
p
p
∑ ∑ JI ( k) =
1 2
( eIs ( k) ) 2 =
s =1
( ys ( k) -
s =1
yIs ( k) ) 2
(5)
其中 , ys ( k) 是对象在第 k 个采样时刻的第 s 个输出分量 , yIs
( k) 是 RFNNI 在第 k 个采样时刻的第 s 个输出分量 , eIs ( k) 是
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved.
2286
电 子 学 报
2006 年
2 所示 ,在这种方法中 ,两个 RFNN 被分别用作辨识器 ( RFN2 NI) 和控制器 (RFNNC) . RFNNC 根据系统误差 e ( k) , 按照自适 应控制律 ,输出控制信号 u ( k) , u ( k) 作用于被控对象 , 使得 对象的输出 y ( k) 能够跟踪期望输出 r( t) . RFNNI 对被控对象 进行辨识 ,并为 RFNNC 的自适应调节提供对象的模型信息. 由于 RFNN 中包含有动态反馈连接环节 ,用 RFNNI 对被控对 象进行辨识时 ,仅仅需要用到前一时刻对象的输出 y ( k - 1) 和当前时刻的控制信号 u ( k) 作为网络的输入 ,这样可以大大 简化网络的结构 .
从上面的描述中 , 我们可以很清楚地知道所提 RFNN 是
一个在输入层具有暂态存储单元的模糊逻辑系统.
3 基于 RFNN 的自适应控制方法
所提出的基于 RFNN 的自适应控制方法的结构框图如图
在所提出的控制方法中 , RFNNC 的自适应控制律和 RFN2
NI 的训练算法都采用 BP 算法. 对于 RFNNI , 训练的目标函数
200第6 年12
期 12 月
电 子 学 报 ACTA ELECTRONICA SINICA
Vol . 34 Dec .
No. 12 2006
一种递归模糊神经网络自适应控制方法
毛六平 ,王耀南 ,孙 炜 ,戴瑜兴
(湖南大学电气与信息工程学院 ,湖南长沙 410082)
摘 要 : 构造了一种递归模糊神经网络 (RFNN) ,该 RFNN 利用递归神经网络实现模糊推理 ,并通过在网络的第 一层添加了反馈连接 ,使网络具有了动态信息处理能力. 基于所设计的 RFNN ,提出了一种自适应控制方案 ,在该控制 方案中 ,采用了两个 RFNN 分别用于对被控对象进行辨识和控制. 将所提出的自适应控制方案应用于交流伺服系统 , 并给出了仿真实验结果 ,验证了所提方法的有效性.
ys ( k) 和 yIs ( k) 之间的误差.
RFNNC 的自适应控制率的目标调节函数则定义为 :
h
h
∑ ∑ JC ( k) =
1 2
( es ( k) ) 2 = ( rs ( k) -
s =1
s =1
ys ( k) ) 2
(6)
其中 , r( k) 是第 k 个采样时刻系统期望输出的第 s 个分量 , ys
RFNNC 提供准确的对象模型信息 , 从而保证了自适应系统的
稳定性和收敛性 .
4 仿真实验
交流电机的动态特性通常具有高度的非线性 , 并且还可 能包含有严重的不确定性因素 , 譬如 :摩擦和负载的变化. 因 此对交流电机进行精确的伺服控制十分困难. 在本文的仿真 实验中 ,我们将把所提出的自适应控制方法应用于交流伺服 系统的控制来检验该方法的有效性. 我们设计的交流伺服系 统包括 两 个 反 馈 环 : 位 置 控 制 环 和 速 度 控 制 环. 所 提 出 的 RFNNC 被用作位置控制器 ,它的输入是电机转轴位置与期望 位置之间的误差 e ,它的输出是电机的期望转速. 而电机的转 速则由速度控制环来进行控制. 由于在多环控制系统中 ,外环 的控制性能往往才是决定系统性能的主要因素 ,因此 ,在本文 的实验中 ,电机的速度控制内环采用的是常规 PID 控制方法.
对每个输入定义了 m 个语言词集节点 , 另外有 l 条控制规则
节点和 p 个输出节点. 用
u
( i
k)
、O
( i
k)
分别代表第
k
层的第
i
个
节点的输入和输出 ,则网络内部的信号传递过程和各层之间
的输入输出关系可以描述如下 :
第一层 :这一层的节点将输入变量引入网络. 与以往国内
外的研究不同 ,本文将反馈连接加入这一层中. 第一层的输入
( k) 是第 k 个采样时刻对象实际输出的第 s 个分量 , es ( k) 是
rs ( k) 和 ys ( k) 之间的误差. 根据 BP 算法可知 , 如果对象的模
型信息未知的话 ,则 RFNNC 的自适应控制率的收敛性将得不
到保证. 很明显 ,在所 提 方 法 中 , RFNNI 的 辨 识 结 果 可 以 为
u
(2) ij
)
,
i = 1 ,2 , …, n , j = 1 ,2 , …, m (2)
其中 , aij和 bij分别代表高斯函数的中心值和宽度 , 下标 ij 对 应第 i 个输入的第 j 个语言词集.
第三层 :这一层根据模糊控制规则库实现模糊推理 ,每个
节点对应一条控制规则. 假设第 q 条模糊规则可以被描述
为:
If x1 is A1q and x2 is A2q and …and xn is Aqn then y1 is b1q , y2 is
B 2q
,
…,
ypБайду номын сангаас
is
B
q p
.
其中 Aiq 是第 q 条模糊规则中第 i 个输入对应的语言词
集
,
B
q j
是
q
条模糊规则中第
j
个输出对应的语言词集.
则第三
层第 q 个节点的输入对应第 q 条模糊规则的前提 , 节点用乘
(3)
i
第四层 :这一层执行去模糊化操作 ,并得到网络输出.
∑ ∑ u
(4) s
=
w
(4) sq
O
(3) q
,
O
(4) s
=
q
u
(4) s
O
(3) q
,s
= 1 ,2 ,
…,
p,
q = 1 ,2 ,
…, l
q
(4)
其中
w
(4) s
是网络的权值 ,它的物理意义是第
q 条规则中语言
词集 Bsq 的隶属函数的中心值.
的第一层加入反馈连接来存储暂态信息. 基于该 RFNN ,本文 还提出了一种自适应控制方法 ,在该控制方法中 ,两个 RFNN 被分别用于对被控对象进行辨识和控制. 为了验证所提方法 的有效性 ,本文将所提控制方法用于交流伺服系统的控制 ,并 给出了仿真实验结果.
2 RFNN 的结构
所提 RFNN 的结构如图 1 所示 ,网络包含 n 个输入节点 ,
法来实现“and”操作 , 输出对应第 q 条规则对输出的影响程
度.
用
O
(2) iqi
来代表
xi
对 Aiq
的隶属度 ,
qi
= 1,2,
…,
m ,则第
q
个节点的输入输出关系为 :
∏ u
(3) q
=
O
(2) iqi
,
O
(3) q
=
u
(3) q
,
i = 1 ,2 ,
…, n , q = 1 ,2 ,
…, l
MAO Liu2ping ,WANG Yao2nan ,SUN Wei ,DAI Yu2xin
( College of Electrical and Information Engineering , Hunan University , Changsha , Hunan 410082 , China)
Abstract : A kind of recurrent fuzzy neural network ( RFNN) is constructed ,in which , recurrent neural network is used to re2 alize fuzzy inference and temporal relations are embedded in the network by adding feedback connections on the first layer of the network. On the basis of the proposed RFNN ,an adaptive control scheme is proposed ,in which ,two proposed RFNNs are used to i2 dentify and control plant respectively. Simulation experiments are made by applying proposed adaptive control scheme on AC servo control problem to confirm its effectiveness .