气动人工肌肉及其在双足机器人中的应用.
人工肌肉的制备与应用
人工肌肉的制备与应用随着科技的不断发展,人们不断尝试着用已有的科技手段来模仿人体肌肉,从而实现更多实用性的应用。
其中,人工肌肉技术在这个过程中崭露头角。
它不仅具有强劲的动力和高效的反应速度,而且还可以在日常生活中得到广泛应用。
本文就来介绍一下,人工肌肉的制备和应用。
一、人工肌肉的概念和分类人工肌肉技术是一项涉及制造和应用人工材料,用以具有类似于人体肌肉的力量和动作的技术。
人工肌肉大致可以分为以下三类:1. 电致变型材料(EAPs)电致变型材料是指一些可以通过电场或磁场控制形状的材料。
它们基本上分为三种类型:电致活性聚合物、电致活性液晶和电解质。
2. 金属合金肌肉金属合金肌肉是一种基于特殊合金的肌肉技术,它能够收缩、伸展、旋转等多种运动方式。
目前金属合金肌肉技术已经被应用于航空工业和微机电机械等领域。
3. 压电效应肌肉压电效应肌肉是指一些具有动态压电效应的晶体材料。
它们可以通过外部电场或机械应力来产生变形,也可以通过外界压力或应力来产生电势差。
二、人工肌肉的制备各类人工肌肉的制备过程略有不同,但大致可以分为以下几个步骤。
1. 材料选择人工肌肉的制备材料最重要的是具有较为优异的物理性能。
一般来说,比较优秀的人工肌肉材料需要具备高度的可逆形变性能、快速的响应速度和良好的耐久性和质量稳定性。
2. 制备过程不同类型的人工肌肉采用的制备工艺和步骤不同,但基本上都包括模具设计、材料介入、材料及模具加工和装配等主要环节。
在制备过程中需要根据实际需要进行选择,如果希望实现快速响应和高效能的合成就需要考虑精细的结构设计和多种物理性能的交互作用。
3. 功能测试制备完成后,需要通过严谨的功能测试来验证人工肌肉的性能和稳定性。
在实验室中进行的功能测试包括肌肉的伸张和收缩等运动模拟,力学性能测试和电子状态评估等多个方面。
三、人工肌肉在生活中的应用人工肌肉技术已经在许多领域得到了广泛应用,例如康复中心、机器人技术和航空航天领域等。
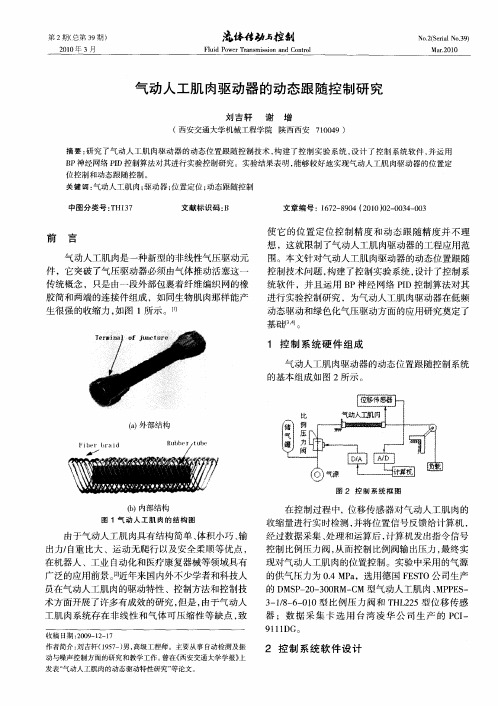
气动人工肌肉驱动器的动态跟随控制研究
2 控 制 系统 软 件 设计
动与噪声控制方 面的研究和教学工作 。 曾在《 西安交通大学学报》 上
发表“ 气动人工肌 肉的动态驱动特性研究” 等论文 。
21 0 0年 3 月
刘吉轩等 : 气动人工肌肉驱动器 的动态跟 随控制研究
3 5
控 制 系统 的软 件设计 采用 虚拟 仪器 开发 平 台软 件 Lb IW 实现 。 Lb IW 软件 平 台能够 以其 直 aVE aVE 观简便 的编程 方式 、 多种 源码级 的设 备驱 动程 序 、 多 种多样 的分析 和表 达功能 支持 ,为用 户快 捷地 设计 实用 的测控 系统创造 了条 件 。气 动人 工肌 肉驱 动器 的动态 位置跟 随控制 系统 的软件 功 能框 图如 图 3 所
B P神 经 网络 PD算 法是 根据 系统 的运 行状 态 , I 适 时调节 PD控 制器 的参 数 k 、i k,使 输 出层 I pk 和 d 神经元 的输 出状 态对应 于 PD控制器 的三个 可调 参 I 数 , 利用 经典增 量式 数字 PD控制算 法 , 加 载系 再 I 对 统进 行控 制 和最 优化 。基 于 B P神 经 网络 的 PD控 I
人机界面l控制算法l数据处理 J l源自耋 圈 I ll 薹 Il 囊
图 3软 件 功 能框 图
图 6控 制 系统 前 面板
本系统 B P神 经 网络 的结构 如 图 7所示 :
Z
kp
输 入
隐
输 出堪
图 7 BP神 经 网络 的 结构 图
图 4 软件 流 程 图
收稿 日期 :0 9 1— 7 20 — 2 1 作者简介 : 刘吉轩 (9 7 ) , 15 一 男 高级工程师 。主要从事 自动检测及振
下肢外骨骼机器人简介及其在康复领域的应用

下肢外骨骼机器人简介及其在康复领域的应用随着现代科技的快速发展,机器人技术在医学领域的应用越来越广泛,其中下肢外骨骼康复机器人为康复医学中的一项重要创新。
这种高科技设备旨在帮助下肢功能障碍的患者恢复行走能力,提高生活质量。
本文将简单介绍下肢外骨骼康复机器人的原理、应用及其发展前景。
一、原理下肢外骨骼康复机器人是一种穿戴式设备,通过外骨骼结构支撑人体下肢,并可利用电动机、传感器和智能控制系统实现辅助行走。
其结构主要包括以下几个方面:1.外骨骼结构由轻质高强度材料制成,模仿人体下肢骨骼的形态和功能,为患者提供额外的支撑和保护。
2.动力系统通常由电动机或气动装置驱动,通过关节处的传动机构实现多自由度运动,辅助患者完成站立、行走及体位转移等。
3.传感器系统内置多种传感器,如加速度计、陀螺仪、力传感器等,实时监测患者的姿态和运动状态,提供精准的反馈数据。
4.智能控制系统基于人工智能和机器学习算法,能够根据传感器数据实时调整外骨骼的运动模式,确保患者的运动稳定性和舒适性。
二、应用下肢外骨骼康复机器人主要应用于以下几个康复领域:1.神经康复对于卒中、脊豌损伤及脑瘫等导致下肢功能障碍的患者,通过外骨骼机器人进行早期康复训练,有助于神经重塑和功能恢复。
2.骨科康复在下肢骨折、关节置换术后,患者可以借助外骨骼机器人进行步态训练,促进骨骼愈合和肌肉力量的恢复。
3.老年护理随着老龄化社会的到来,许多老年人面临行动不便的问题。
外骨骼机器人可以为他们提供行走辅助,提升生活自理能力。
4.运动训练运动员在康复训练中使用外骨骼机器人,可以精确控制训练强度和动作模式,提高康复效果。
三、优势相比传统康复方法,下肢外骨骼康复机器人具有多项显著优势:1.提高康复效率通过精确的运动控制和数据反馈,显著缩短康复周期。
2.标准化训练通过标准化的程序,对同一类疾病,不同机构及不同治疗师采用标准方案实施治疗,实现训练方案的同质化。
3.数据追踪实时记录患者的康复数据,便于医生评估康复进展和调整治疗方案。
(完整版)基于气动人工肌肉驱动的多关节机械手指动_力学仿真毕业设计

南京工程学院毕业设计说明书(论文)系部:机械工程学院专业:机械电子工程题目:基于气动人工肌肉驱动的多关节机械手指动力学仿真指导者:闫华副教授评阅者:2015 年 5 月南京毕业设计说明书(论文)中文摘要由于气动人工肌肉比重小、结构紧凑,占用空间小等优点,本文提出一种曲柄滑块机构来驱动手指弯曲,让气动人工肌肉驱动滑块运动,首先设计气动肌肉手指关节结构,并用SolidWorks绘制手指的三维图,利用ADAMS和MATLAB 进行动力学联合仿真,在手指端设置一定的负载,输入手指三个关节的直线驱动,观察手指末端的角速度变化和三个驱动力的变化,最后根据气动肌肉的驱动原理进行了气动肌肉灵巧手关节运动的控制研究,利用比例压力阀对气动肌肉压力进行控制,使气动肌肉横向收缩带动滑动移动,从而实现对手指关节弯曲角度的控制。
关键词:仿人灵巧手;关节设计;气动肌肉;动力学仿真毕业设计说明书(论文)外文摘要Title Dynamic simulation of multi joint robotic fingers based on pneumatic muscle driven muscle AbstractBecause of the small proportion of pneumatic muscle, compact structure and small space occupancy, etc. In this paper, a slider crank mechanism drive the finger bending. The slider crank mechanism is driven by artificial muscles, Firstly, designing pneumatic muscle finger joint structure, And with the SolidWorks drawing fingers entity graph, using ADAMS and MATLAB co-simulation of the dynamics, the fingertip set certain load, input linear drive of the three joints of the fingers, to observe the change of the angular velocity of the finger tip and three driving force of change, finally according to the driving principle of the pneumatic muscle was analyzed by gas dynamic muscle dexterous order to realize the control of the flexion angles of finger joints.Keywords: Dexterous ; Pneumatic muscles; Dynamic simulation目录前言 (1)第一章绪论 (2)1.1课题项目的背景 (2)1.2气动人工肌肉多关节手指的国内外发展现状 (2)1.3气动技术的介绍以及发展前景 (4)1.4论文研究的内容和方法 (6)第二章多关节手指的结构设计及建模 (7)2.1 气动肌肉的介绍 (7)2.1.1 气动肌肉的内部结构 (7)2.2 气动机械手指的基本结构 (8)2.2.1 绘图软件SoildWorks介绍 (8)2.2.2 整体设计方案的设计 (8)2.2.3 手指的关节设计 (9)2.2.4手指关节的建模 (11)2.3 灵巧手指的装配和三维模型的导出 (11)第三章多关节手指的动力学仿真分析 (12)3.1仿真软件ADAMS和MATLAB简介 (12)3.2 动力学仿真过程介绍 (13)3.2.1 ADAMS参数设置过程 (13)3.2.2 建立MATLAB控制模型 (16)3.3 动力学仿真结果分析以及结论 (17)第四章气动肌肉灵巧手指的控制系统设计 (18)4.1气动肌肉回路原理和设计 (18)4.1.1气动回路器件的选择 (19)4.2灵巧手指的关节控制系统 (20)4.2.1控制系统的原理 (20)4.2.2控制系统的硬件选择 (21)4.3 DA控制界面的设计和程序的编写 (22)|第五章结论及总结 (24)参考文献 (25)致谢 (26)前言随着机器人技术的日益成熟,工业机器人极有可能最终取代机床,成为新一代工业生产的基础。
一种可提高和改善步行功能的装置:动力下肢外骨骼系统的设计及应用

一种可提高和改善步行功能的装置:动力下肢外骨骼系统的设计及应用王一吉;李建军【摘要】Lower extremity exoskeleton system is a kind of human-machine robot, which combines the artificial intelligence with the power of mechanism. Recent years, the field of lower extremity exoskeleton robots have rapidly evolved and development of relevant technologies have dramatically increased these robots available for facilitating human walking function that could only be imagined a few years ago. Some technologies are so new that they lack the scientific evidence that would justify their use in the real setting. This paper presents an over view of design configurations, control methods and simulation test used for lower extremity exoskeleton robots. Further research efforts are required in order to incorporate many of the new technologies described in this review to promote the development of the lower extremity exoskeleton robots.%下肢外骨骼系统是一种结合了人工智能和机械动力装置的机器人。
人造肌肉
致动机理 --离子型
离子型人造肌肉致动与 材料及其所含水分有关, 同样也需要柔性电极的 支持。施加电压使材料 中均匀分布的阴阳离子 分别向正负极聚集,同 时内部的水分子也随之 移动,导致薄膜两边的 水分子密度差异,进而 产生不同的压力使薄膜 产生摇摆伸缩运动。
人造肌肉优异特性:
➢寿命长,响应速度极快; ➢产生运动而不需要轴承和滑动部件; ➢在单片薄膜上改变电极排布方式就可以产生多自由 度的运动; ➢类似于生物肌肉比例恒定的特性,适用于微型装置; ➢材料高度透明且价格便宜。
人造肌肉通过运动 产生变色效果。运 动过程产生势能或 压力,将“液囊” 的液体从一个地方 泵压到另一个地方, 利用与动物变色相 似的机理产生光效 应。
智能材料
Artificial muscle
成员:许志骁、唐琼卫
人体由600余块肌肉构 成,司全身运动。
粗肌丝:由肌球蛋白组成。
肌原纤维
肌动蛋白
骨 骼 肌
肌管系统
细肌丝
原肌球蛋白 肌钙蛋白
肌肉收缩:
脊椎动物骨骼肌靠传播性活动电位而发生的收缩。
肌浆中Ca2+与C亚基结合 I亚基传递信息 原肌凝蛋白变构 暴露结合位点 横桥与肌动蛋白结合 拖动细肌丝滑行 肌肉收缩
一种特殊材料,同时具有压电陶瓷和生物肌肉的 一些特性。两侧面粘有柔性电极,通电后会发生 显著的变形,同时还伴随有快速的响应和相当高 的机电效率。在许多特殊领域有着广泛的应用潜 力。
为制造具有肌肉性能的致动器提 供了可能。
与自然肌肉的惊人相似性
致动机理 --电子型
由电场驱动自由电荷, 在两个电极中分别聚集 极性相反的电荷,产生 麦克斯韦应力(其有效 压力是纵向压缩以及平 面内膨胀所共同引起的, 由于薄膜很薄,可近似 认为在纵向和平面内的 应力相等),从而压缩 材料导致其变形。
人工肌肉的研究和开发
人工肌肉的研究和开发人工肌肉,是指能够模拟真实肌肉运动并进行控制的材料或器件。
其发展历程与人类对机器人和生物体仿真技术的研究密不可分。
作为新型智能材料的代表之一,人工肌肉被广泛应用于机器人领域、生物医学领域及智能纺织品领域等。
一、人工肌肉的分类目前,根据不同的分类标准,人工肌肉可分为:1. 基于形态的分类人工肌肉的形态与肌纤维类似,可分为直线型、环形型和扭转型等,其中以直线型最为常见。
通过几何形态的不同,人工肌肉可以适用于不同的应用场景,例如直线型人工肌肉可用于机械臂伸缩控制,环形型人工肌肉则可用于生物医学器械领域的血管和肠道支撑。
2. 基于驱动方式的分类人工肌肉的驱动方式可分为电致臀肌、电热臀肌和光致臀肌等。
其中最为常见的是电致臀肌,其驱动方式是通过在两端施加电场来使肌肉发生收缩或舒张。
二、人工肌肉的材料特性在设计研发人工肌肉时,需要考虑其材料特性,以实现高效的运动响应和长时间的稳定性。
而不同的材料特性也决定着不同用途领域之间的差异化。
1. 操作频率人工肌肉对于操作频率的响应速度是至关重要的,通过精准的控制可实现更加复杂的机械姿态、快速的动态响应和更加灵活的多模态运动。
2. 周期稳定性人工肌肉需要能够快速响应不同的刺激,但同时需要保证其较高的周期稳定性,这意味着肌肉纤维应该有足够的刚性和韧性以及可控的弹性特性。
3. 负载响应人工肌肉的应用场景不同,需要承受的负载强度也有所不同。
例如在机器人领域,需要承受较大的负载和冲击力,因此需要具有较好的强度和韧性。
三、人工肌肉的应用领域1. 机器人领域人工肌肉在机器人领域的应用广泛,例如在轮足机器人的摆臂运动、人形机器人的手臂伸展、水下机器人的机械臂操作等等。
人工肌肉的特性决定着其在机器人领域的应用主要集中在动态响应和多模态控制等方面。
2. 生物医学领域人工肌肉的应用也可以延伸到生物医学领域,例如在神经外科手术中对肌纤维的重建,或用于仿生脊柱和关节替代等医用材料研发。
气动人工肌肉驱动灵巧手的设计与研究
气动人工肌肉驱动灵巧手的设计与研究
张氢;覃昶;孙远韬
【期刊名称】《液压与气动》
【年(卷),期】2018(000)005
【摘要】针对气动人工肌肉推广应用的问题,提出了一种轻小型气动人工肌肉的制作方案,并对其不同压力下的力学性能进行了试验和测试.试验结果表明,该气动人工肌肉具有高收缩率和大输出力的特性.基于该气动人工肌肉的运动特性,设计了一款欠驱动的多自由度灵巧手,并进行了多项抓取实验,验证了其多种状况下的工作能力.基于气动人工肌肉的灵巧手具有适应性强和抓取力大的特点,对气动人工肌肉的应用和机器人末端执行器的开发具有参考价值.
【总页数】5页(P93-97)
【作者】张氢;覃昶;孙远韬
【作者单位】同济大学机械与能源工程学院,上海201804;同济大学机械与能源工程学院,上海201804;同济大学机械与能源工程学院,上海201804
【正文语种】中文
【中图分类】TH138
【相关文献】
1.人工肌肉驱动的多指灵巧手运动学计算与分析 [J], 朱玉乐;郭冰菁
2.气动人工肌肉驱动器驱动六足爬行机器人的步态选择和结构设计 [J], 张之璐;彭光正;朱智乾;范伟
3.气动人工肌肉驱动仿人灵巧手的设计 [J], 范伟;余麟;刘昭博;刘昊;彭光正
4.基于气动人工肌肉几何模型的灵巧手自适应跟踪控制 [J], 张林;闻新
5.气动人工肌肉驱动仿人灵巧手的结构设计 [J], 彭光正;余麟;刘昊
因版权原因,仅展示原文概要,查看原文内容请购买。
气动人工肌肉系统控制性能的实验研究
[ 4 ] 于双和 ,傅佩琛 ,强文义. 模糊变结构控制及设计方 法. 哈尔滨工业大学学报 , 2001 (4) : 217~220
(上接第 15 页)
L 0 = L 1 -
4 结论
图 4 系统跟踪正弦信号的实验结果
图 5 增加外力系统跟踪正弦信号的实验结果
这由于气动人工肌肉的输出力是压力和位移 的函数 ,对于单根气动人工肌肉当位移一定时 ,肌 肉腔内的压力与负载力成正比. 当外负载力较小 时 ,腔内压力也较低. 而且 ,由于气动人工肌肉收 缩时产生拉力 , 放气伸长是通过橡胶弹性力来实 现的 ,因而该系统只能承受较低外部推力. 这些都
图 1 气动人工肌肉实验系统示意图 1 —气源 ; 2 —储气罐 ; 3 —比 例 阀 ; 4 —压 力 传 感 器 ;
5 —气动人工肌肉 ;6 —位移传感器 ;7 —负载
在进行控制操作时计算机根据 AD 采集的数 据进行控制量的计算 ,计算的控制量通过 DA 来
收稿日期 : 2003207223. 作者简介 : 杜经民 (19692) ,男 ,讲师 ;武汉 ,华中科技大学 FESTO 气动中心 (430074) . E2mail : fstfly @mail. hust . edu. cn 基金项目 : 国家自然科学基金资助项目 (50375057) .
R1 - R0
tanα
+
t1 2
si
nα
+
∫R12πρt R0
China.
气动人工肌肉是一种具有结构简单 、功率自 重比大 、有良好柔性 、不会损害操作对象的新型气 动执行元件 ,其在工业机器人 、医学等领域将会有 极其广泛的应用前景[1 ] . 本文根据文献 [ 2 ] 提出 的气动人工肌肉系统变结构控制算法 , 对单根气 动人工肌肉系统进行了实验研究 , 分析了气动人 工肌肉的控制特性.
气动肌肉驱动仿青蛙游动机器人结构设计
2 0 1 6 年1 0月
哈 尔 滨 商 业 大 学 学 报 (自然 科 学版 )
J o u r n a l o f Ha r b i n U n i v e r s i t y o f C o mme r c e f N a t u r a l S c i e n c e s E d i t i o n )
mo de,wi t h us i n g pn e u ma t i c a r t i ic f i a l mus c l e s a s a d r i v e i t c o u l d b e a g o o d s i mu l a t i o n o f b i —
s t a c k e d c o n ig f u r a t i o n. Th e f e a s i bi l i t y o f t h e s t r uc t u r a l de s i g n wa s v e r i ie f d t h r o ug h t h e r o b o t f o r wa r d k i n e ma t i c s a n a l y s i s a n d t h e s i mu l a t i o n o f Ad a ms . Me c h a n i c a l de s i g n o f i n s p i r e d S wi mmi n g Ro b o t wi l l be a f o u n d a t i o n f o r o t h e r k e y j s s a e s o f t h e r o bo t r e s e a r c h
Me c ha ni c a l de s i g n o f f r o g i ns p i r e d s wi mmi ng r o b o t po we r e d by pn e u ma t i c m us c l e