对流层延迟经验模型改正影响因子分析
对流层延迟改正霍普菲尔德模型

对流层延迟改正霍普菲尔德模型说到对流层延迟,嘿,别以为这是个生硬的科学名词。
它跟我们的生活也有那么点儿关系。
对流层延迟,简单来说,就是信号在穿越大气层时遭遇的小麻烦。
想象一下,你在跟朋友视频通话,突然画面卡住,声音也跟着断断续续的。
这就是对流层延迟在作怪,真是让人哭笑不得!嘿,这个问题其实在很多高科技领域,比如卫星定位、气象预测,还有无线通讯中,都是个大难题。
霍普菲尔德模型,这名字听上去像个科学怪人,但它其实是一种用来纠正这种延迟的算法。
简单来说,它就像是个聪明的修理工,把信号在大气中遭遇的麻烦都给修理好了。
想象一下,信号就像一只小鸟,在天空中飞翔,霍普菲尔德模型就像那位经验丰富的飞行教练,指挥着小鸟安全降落。
我们都知道,天上的天气变化无常,阳光明媚的瞬间,可能转眼就下起大雨,信号也得受影响。
因此,模型需要在各种情况下都表现得游刃有余。
这个模型的工作原理其实有点像我们生活中的各种关系。
你和朋友们一起出去玩,总有一个人会提前到达,或者总有人迟到。
霍普菲尔德模型就会记录下这些“迟到”的信号,努力把它们调到合适的时间。
是不是感觉跟生活中的一些小插曲很像?信息的传递就像一场接力赛,接力棒如果传得不顺畅,整个比赛就会受影响。
让我们来聊聊这个模型的优点吧!它能有效减少延迟。
这就像你在微信群里发消息,如果有一个朋友的网络不好,消息发出去后就卡在那里,不知道什么时候能看到。
霍普菲尔德模型就像是网络的“超级优化师”,帮助信号快速穿越各种阻碍,让信息能够顺畅流动。
这样一来,大家都能及时收到重要消息,感觉就像是一场没有任何失误的接力赛。
模型也不是万能的,有时候天公不作美,信号还是会受到影响。
但是,霍普菲尔德模型的出现,让我们看到了希望。
就像是暴风雨后,总会有彩虹出现,信号的稳定性在不断提升,让我们的生活更加便利。
想象一下,如果没有这种技术,卫星导航岂不是变成了“打盹”的老爷爷,指引不再准确,真是让人捉急。
很多朋友可能会问,这模型具体怎么应用?嘿,这里就要提到高科技领域的一些亮点了。
两种gpt系列对流层经验模型精度分析
1 GPT 系列的对流层模型
1.1 GPT2 模型
GPT 系列模型最早由 2007 年 Boehm 等建立的[3] ꎬ该
模型是基于 3 年(1999—2002) 的 ERA- 40 再分析资料利
用 9 阶球谐函数建立的ꎮ 该模型在建立时考虑了温度和
气压的年周期和半年周期变化特性ꎬ但它在空间和时间
第 43 卷 第 3 期 2020 年 3 月
测绘与空间地理信息
GEOMATICS & SPATIAL INFORMATION TECHNOLOGY
Vol.43ꎬNo.3 Mar.ꎬ 2020
两种 GPT 系列对流层经验模型精度分析
武可强ꎬ 王建强
( 东华理工大学 测绘工程学院ꎬ江西 南昌 330013)
摘 要:针对很多测站不能提供实测气象数据的情况ꎬ本文对两种高精度的 GPT 系列经验模型进行验证ꎮ 通过 对两种模型获得的经验气象数据及对计算可降水汽非常重要的 ZHD 的精度进行分析ꎬ得出如下结论:GPT2w 模 型的精度要高于 GPT2 模型ꎬ且在无实测气象数据的情况下可以使用 GPT2w 模型来进行 GNSS 水汽反演ꎮ 关键词:经验模型ꎻ可降水汽ꎻGPT2w 模型ꎻ气象数据 中图分类号:P228 文献标识码:A 文章编号:1672-5867(2020)03-0076-03
0 引 言
水汽是大气中的活跃成分ꎬ大气水汽的时空变化对 于理解天气过程、天气预报和天气系统演变等研究具有 重要意义ꎮ 要想获得高精度的水汽产品ꎬ必须同步获取 测站处的气象元素( 温度 T、气压 P 等)ꎮ 在许多测站没 有安装气象传感器无法获得实测的气象元素时ꎬ需要采 用经验模型来获得测站的气象元素ꎮ 目前ꎬGNSS 气象学 中常用的无需实测气象元素的对流层模型是全球气温气 压经 验 模 型 ( GPT ) 系 列 模 型ꎬ 它 包 括 GPT、 GPT2 和 GPT2w 3 种模型ꎮ
两种精化的对流层延迟改正模型

两种精化的对流层延迟改正模型姚宜斌;张豹;严凤;许超钤【摘要】对流层延迟是全球导航卫星系统(Global Navigation Satellite System,GNSS)导航定位中的重要误差源,其量值主要受气象条件影响.采用传统对流层建模思路,利用GPT2模型来提供相对准确的气温、气压和相对湿度,然后利用Saastamoinen模型来计算天顶对流层延迟,由此构建了GPT2+ Saas模型;采用新的对流层建模思路,直接针对天顶对流层延迟的时空特性建模,构建了与GPT2+Saas模型相匹配的GZTDS格网模型.以GGOSAtmosphere格网数据为参考,GPT2+Saas模型(Bias:0.2 cm;RMS:4.2 cm)和GZTDS模型(Bias:0.2cm;RMS:3.7cm)较UNB3m模型精度分别提升34%和43%.以IGS (International GNSS Service)数据为参考,GPT2+Saas (Bias:0.5 cm;RMS:4.7 cm)和GZTDS(Bias:-0.3 cm;RMS:3.8 cm)相对UNB3m模型精度分别提升10%和27%.针对GPT2+ Saas模型在少数测站出现精度异常的情况进行了研究,探讨了可能的原因.在两种不同思路构建的精化对流层模型中,GZTDS模型不仅表现出更高的精度,而且在时间稳定性和地理稳定性上也表现出优越性.【期刊名称】《地球物理学报》【年(卷),期】2015(058)005【总页数】10页(P1492-1501)【关键词】对流层延迟;GZTDS模型;GPT2模型;Saastamoinen模型【作者】姚宜斌;张豹;严凤;许超钤【作者单位】武汉大学测绘学院,武汉 430079;武汉大学地球空间环境与大地测量教育部重点实验室,武汉430079;地球空间信息技术协同创新中心,武汉430079;武汉大学测绘学院,武汉 430079;长江空间信息技术工程有限公司(武汉),武汉430010;武汉大学测绘学院,武汉 430079【正文语种】中文【中图分类】P2281 引言GNSS信号穿越中性大气层时会产生时延和弯曲,导致接收机测距误差,这一误差我们称之为对流层延迟误差.对流层延迟是非色散性延迟,与信号频率无关,不能通过不同频率信号的线性组合予以消除,一般是采用模型进行改正.信号传播路径上的对流层延迟可以模型化为天顶方向的对流层延迟(Zenith Tropospheric Delay,ZTD)与投影函数(Mapping Function,MF)的乘积,而天顶对流层延迟又可以模型化为两部分:天顶静力学延迟(Zenith Hydrostatic Delay,ZHD)和天顶湿延迟(Zenith Wet Delay,ZWD),后者主要由水汽引起.传统的Hopfield模型(Hopfield,1971)、Saastamoinen模型(Saastamoinen,1972)和Black模型(Black,1978)都是基于理想气体状态方程和一些参数假设建立的,在有实测气象参数的条件下,天顶方向的改正精度为厘米级.Collins和Langley为美国的广域增强系统(Wide Area Augmentation System,WAAS)设计的无需实测气象参数支持的UNB系列(UNB1-4、UNB3m等)模型(Collins et al.,1996;Leandro et al.,2006),通过使用一个包含有温度、压强、水汽压(UNB3m为相对湿度)、温度垂直递减率、水汽垂直递减率的气象参数表来提供气象参数,进而利用Saastamoinen模型来计算天顶对流层延迟.其中广为使用的UNB3模型在无气象参数支持下其天顶方向对流层总延迟的预报精度为5.2cm,其改进型UNB3m模型的精度为4.9cm (Leandro et al.,2006).类似地,EGNOS模型是欧盟星基广域增强系统推荐用户使用的天顶对流层延迟改正模型(Penna et al.,2001),其形式与UNB3模型相似,由于采用了简化公式,其精度略差于UNB3模型(姚宜斌等,2013).UNB系列模型和EGNOS模型作为新一代对流层延迟模型,摆脱了对实测气象参数的依赖,但仍然可以取得与使用实测气象参数的传统对流层延迟模型相当的精度,极大地方便了用户的使用(曲伟箐等,2008).杨徉等(2013)利用 GPT模型给出的气温、气压以及UNB3m模型提供的水汽压参数作为Saastamoinen模型的输入参数构建了综合对流层延迟模型,该模型提高了Saastamoinen模型的适用性,但相比于UNB3m模型和EGNOS模型,精度并未有明显提升,其中可能的原因是依然沿用UNB3m模型中比较简单的相对湿度参数导致对流层延迟中的湿延迟成分估计不准.针对UNB系列模型、EGNOS模型等新一代对流层延迟模型中气象参数表过于简单、不能准确反映全球气象的不足,Li等直接对ZTD的时空特性建模,建立了复杂精致的IGGtrop模型(Li et al.,2012),虽取得了良好的精度,但过于复杂的形式限制了它的使用.后来Li等发表了IGGtrop_ri(i=1,2,3)模型,新模型通过在赤道区域采用更为简洁的算法、在ZTD变化较小的区域采用较低的分辨率以及优化的参数存储方法等措施,使新模型的参数量显著减小,也使新模型更适用于BDS(BeiDou System)/GNSS研究和应用(Li et al.,2015).总结前人的研究成果可以发现,经验化的对流层延迟模型主要有两种:一种是针对气象参数建模,然后利用物理方程计算天顶延迟量;另一种是直接对天顶延迟建模,不考虑气象参数.本文将分别采用这两种不同的思路建立时空分辨率接近的精致的对流层延迟模型,并评估这两种模型的优劣.2 两种新的对流层延迟改正模型2.1 GPT2+Saastamoinen模型GPT2模型是基于 ERA-Interim (Dee et al.,2011)2001—2010年全球月平均的气压、气温、比湿的廓线资料建立的气象参数模型,它能以5°或1°的分辨率提供全球格网点上的气压、温度、温度垂直递减率、比湿以及 VMF1(Boehm et al.,2006)干湿投影函数的系数ah和aw(Lagler et al.,2013).在每个格网点上,每个气象参数r(t)的时间变化通过包含年周期和半年周期的三角函数表达(Lagler et al.,2013):式中的A0,A1,A2,B1,B2 都已事先计算好,并以格网形式保存在一个文本文件中.在垂直方向上,Lagler等假定地球附近的温度随高度遵循线性变化,而气压的垂直变化则用指数函数来表达,并采用如下公式(http://ggosatm.hg.tuwien.ac.at/DELAY/SOURCE/gpt2.m)对气象参数进行高度改正(Lagler et al.,2013):式中T0,P0分别是格网点上的气温(K)和气压(hPa),T和P分别是由格网点增加dh高度时的温度和气压,dT是温度的垂直递减率,Q是比湿,e是水汽压(hPa).gm为重力加速度,在GPT2模型中取值9.80665m·s-2.dMtr和Rg 分别是大气摩尔质量和气体常数,其值分别为28.965×10-3 kg/mol,8.3143J /K/mol.当使用GPT2模型时,输入测站的纬度、经度、大地高以及观测时刻的约化儒略日,模型根据测站坐标查找格网文件中与之邻近的四个点,然后根据儒略日利用式(1)计算格网点上的气象参数,并利用式(2)—(7)将格网点上的气象参数归算到测站高度,最后利用双线性内插得出站点位置的气象参数.可考虑将使用GPT2模型计算的测站位置处的气象参数带入简化的Saastamoinen模型(李征航和黄劲松,2005)来计算测站位置处的天顶对流层延迟:式中P和e的单位都是hPa,T的单位为K.至此,我们就可以利用GPT2模型和Saastamoinen模型来获取全球任意地点的天顶对流层延迟参数.为描述方便,以下将这种模型称为GPT2+Saas模型.2.2 GZTDS模型姚宜斌等(2013)建立了利用球谐函数表达的全球对流层天顶延迟模型GZTD.它首先将天顶对流层延迟参数表达为包含年周期和半年周期的三角函数,并使用指数函数进行高程改正,其形式可如下表达:式中ZTD表示天顶总延迟,Ave为ZTD的年均值,Amp1为ZTD年周期项的振幅,Amp2为半年周期项的振幅,D1和D2分别为年周期和半年周期的初始相位,h为测站高程,β为高程改正系数,全球取平均值-1.3137×10-4(姚宜斌等,2013).式(10)的表达方法与式(1)是等价的.为使用的方便,再利用10×10阶球谐函数对模型系数进行拟合.GPT2模型是利用2001—2010年共10年的ECMWF (European Centre for Medium-range Weather Forecast)ERA-Interim月平均的气压、气温、比湿和位势等气象数据来求解式(1)中气象参数的系数,并在全球范围内以1°和5°的分辨率提供了GPT2模型参数表(ASCII格式的1°文件为14MB,5°为0.5MB)(Lagler et al.,2013).GGOS Atmosphere提供的ZHD和ZWD也是以ECMWF的再分析资料为基础计算的,但它以纬度2°经度2.5°的分辨率提供每天0∶00,6∶00,12∶00和18∶00UTC的格网产品.在本文的研究中,为了最大程度地使新GZTD模型与GPT2模型(5°分辨率的)保持一致(因为2.1中的模型将基于 GPT2),我们利用 GGOS Atmosphere 2001—2010年的ZHD和ZWD 数据在4°×5°(纬度每隔4°,经度每隔5°)的格网点上拟合(10)式中的ZTD模型系数 Ave、Amp1、Amp2、D1 和D2,并不再用球谐函数进行表达,而直接以文本形式存储这些格网点上的模型系数信息,由此确立的新模型我们称之为GZTDS(分辨率为纬度方向4°,经度方向5°).这样确立的GZTDS模型无论在建模数据源上还是在模型的分辨率上都最大程度地与GPT2+Saas模型保持了一致性,这样更有利于对两种建模方式本身进行更客观的评估.当使用GZTDS模型时,首先根据测站经纬度找到与之邻近的四个格网点,然后根据公式(10)和模型系数分别计算四个格网点上相对于测站高度的ZTD,最后利用双线性内插法计算测站位置处的ZTD.3 模型验证3.1 利用GGOS Atmosphere格网数据对模型进行验证为了验证两种不同建模方法的正确性和有效性,我们将2011—2013年的GGOS Atmosphere提供的天顶对流层延迟数据作为参考值,对GPT2+Saas模型和GZTDS模型进行了检验,并与新一代经验模型(这里指UNB系列模型和EGNOS 模型)中表现最好的UNB3m模型和先前建立的GZTD模型进行了比较.在每个格网点上(纬度方向每隔4°,经度方向每隔5°)我们统计了模型相对于参考值的平均偏差(Bias)和均方根误差(RMS),图1给出了四种模型的Bias和RMS在全球的分布情况.由图1a可以看出UNB3m模型在南极和赤道附近地区存在较大的Bias和RMS,其精度的地理分布非常不均匀,北半球的精度明显优于南半球.导致这种情况的原因是UNB3m的气象参数表过于简单,它每隔15纬度才提供5个气象参数的均值和振幅,且不考虑气象参数的经向变化,并且基于对称假设简单地将南半球取与北半球相同的气象参数,仅仅将振幅的符号改变,这样导致模型在南半球精度很差,尤其是在南半球高纬度地区.图1b中的GPT2+Saas模型明显优于UNB3m模型,其精度的地理分布更为均匀,但在赤道地区仍然存在精度较差的情况.比较图1c和1d可以看出,GZTDS模型在全球范围内的精度分布要优于GZTD模型,尤其是削弱了GZTD模型在中低纬度的误差,这主要与采用格网模型代替球谐拟合有关,因为直接用格网方法给出每个点上的模型系数相对于球谐函数拟合,避免了拟合误差的引入,同时也保留了原有的分辨率,缺点仅仅是保留了原始的数量较多的参数,同时更长时间跨度的数据(GZTD模型8年数据,GZTDS模型10年数据)被用于拟合模型也有利于提高模型精度.图1d中的GZTDS模型相比GPT2+Saas模型有了进一步的改进,尤其是显著消除了模型在全球范围内的偏差,模型精度有所提高,精度的地理分布也更为一致.表1统计了四种模型在2011—2013年里的平均Bias和平均RMS,由此可以更加准确地看出模型的整体精度情况.表1 利用2011—2013年的GGOS Atmosphere数据对四种模型的检验结果(单位:cm)Table 1 Test results of the four models from 2011to 2013 with respect to GGOS Atmosphere data(unit:cm)UNB3mGPT2+Saas GZTD GZTDS Year Bias RMS Bias RMS Bias RMS Bias RMS 2011 3.4 6.4 0.3 4.3 0.2 4.3 0.2 3.7 2012 3.3 6.4 0.2 4.2 0.1 4.3 0.2 3.6 2013 3.4 6.5 0.2 4.3 0.1 4.4 0.2 3.7 Total 3.4 6.4 0.2 4.2 0.1 4.3 0.2 3.7图1 相对于2011—2013年GGOS Atmosphere的ZTD数据,四种模型在全球的Bias和RMS分布(单位:cm)(根据4°×5°的检验结果画出)(a)UNB3m;(b)GPT2+Saas;(c)GZTD;(d)GZTDS.Fig.1 Global Bias and RMS(in cm)with respect to GGOS Atmosphere ZTD data from 2011to2013for the four models(the resolution of results is 4°×5°)表1显示了四种模型在2011—2013年的精度信息,可以看出四种模型在任意1年或3年里的精度都是非常稳定的.表现最优的是GZTDS模型,其平均偏差仅为0.2cm,平均RMS为3.7cm,相对于GZTD模型精度提高了0.6cm;其次为GPT2+Saas模型,最差的是UNB3m模型.需要指出的是UNB3m模型显示了一个较大的平均偏差(~3.4cm),这可能是因为用于建模的数据集与参与检验的数据集存在系统差导致的,在3.2节我们将利用IGS提供的GNSS实测对流层延迟数据对这四种模型进行检验.上面对四种模型的精度进行了检验,并给出了模型精度的地理分布情况,这里我们进一步对模型的季节变化进行研究分析.由于季节受纬度影响,我们将同一纬度不同格网点同一天的数据取平均,并在同一纬度上比较四种模型的表现,这样可以有效消除纬度对季节变化的影响.我们在高中低纬分别选择了一特定纬度作为代表,统计了2011—2013年四种模型在6条纬线上的季节变化,并将GGOS Atmosphere的ZTD数据作为参照,结果如图2所示.由图2a和2b可以看出ZTD在低纬度地区的值较大,高纬度地区的值较小,这主要由于水汽的纬度差异导致的,即低纬度地区水汽含量丰富,对湿延迟的贡献较大,而高纬度地区水汽含量较低,对湿延迟贡献较小.与参考ZTD值相比,GZTDS模型与参考值最吻合,GPT2+Saas模型略差于GZTDS模型,而UNB3m模型表现较差,GZTD模型的变化趋势与GZTDS模型比较接近.GZTDS模型和GPT2+Saas模型在不同纬度既可以表现ZTD变化的年周期特性(如38°N,70°N,6°S,38°S),又能表现其半年周期特性(如6°N,70°S),而UNB3m模型至多只能表现年周期特性,在低于15°的纬度区间里,其ZTD不再表现时间变化.比较图2a 和2b中三条纬度线的分布,可以明显看出ZTD并不具备南北半球对称的特性,因此,UNB系列模型和EGNOS模型中假定南北半球对称的做法是不准确的.以上种种表明GZTDS模型和GPT2+Saas模型相对于UNB系列模型和EGNOS模型更加精致,精度和稳定性更高,是两种具有可用性的不同类型(以Saastamoinen 模型中物理方程为基础的模型和纯以ZTD统计性质为基础的模型)的精化对流层延迟经验模型.3.2 利用IGS实测数据对模型进行验证图2 四种模型2011—2013年在6条纬度线上的季节变化,参考值为GGOS Atmosphere的ZTD数据,图中用ZTD表示(a)和(b)分别显示的是模型在北半球和南半球高中低三条纬线上的ZTD.Fig.2 Seasonal variations of the four models at 6latitudes from 2011to 2013with respect to GGOS Atmosphere ZTD data which is labeled as ZTD in the figure(a)and(b)show respectively the ZTD at high,middle,low latitudes in the north and south hemisphere.由于GGOS Atmosphere的数据可能与构建UNB3m模型的数据存在系统性偏差,因此3.1节中的结果可能不能完全准确地反映UNB3m模型的效能.为此,我们将2010年全年123个IGS站上的ZTD数据作为参考值,对以上四种模型重新进行了检验,同样统计了每个测站上模型值与参考值的平均Bias和RMS.图3按纬度显示的是123个测站上的平均Bias和RMS,表2统计了四种模型的平均Bias和RMS.表2 利用2010年123个IGS站的ZTD数据对四种模型的检验结果(单位:cm)Table 2 Test results of the four models with respect to the ZTD data from 123IGS stations in 2010(unit:cm)Bias 0.9 0.5 -0.7 -0.3平均UNB3mGPT2+Saas GZTD GZTDS平均RMS 5.2 4.7 4.4 3.8图3显示了四种模型的Bias和RMS随纬度的变化情况,可以明显看到GZTDS模型在各个纬度的精度比较平稳,波动不大,GZTD模型与之相似;而UNB3m模型和GPT2+Saas模型的精度在不同纬度都出现了较大的波动.与采用GGOS Atmosphere格网数据检验的结果类似,UNB3m模型在南半球的精度要明显差于北半球,这与它的球对称假设有关;GPT2+Saas模型主要在20°N—30°N之间出现了三个误差较大的站点(KOKV、LPAL和MAUI),这三个站都分布在水汽丰富且高程超过1100m的地方,高程改正和水汽估计效能不佳可能是导致GPT2+Saas模型出现较大误差的原因.表2中的整体统计结果显示GZTDS模型表现出了与3.1节中采用GGOS Atmosphere格网数据进行检验非常近似的精度,精度依然比GZTD提升了0.6cm;GPT2+Saas模型精度有所下降,UNB3m模型的精度却有所提升.相对于UNB3m模型,GPT2+Saas模型精度提升10%,GZTD模型精度提升15%,GZTDS模型的精度提升了27%.鉴于这四种模型都是为导航定位服务,因此采用IGS数据对其进行的检验更客观,也更具参考价值.图3 利用123个IGS站2010年的数据对四种模型的检验Fig.3 Test results of the four models with respect to the ZTD data from 123IGS stations in 2010 为了找出图3中GPT2+Saas模型在三个站点误差较大的原因,我们给出了模型精度随高程的变化曲线,如图4所示.在图4中品红色曲线上数值最大的三个点即是KOKV (RMS:11.4cm)、LPAL (RMS:11.9cm)和 MAUI(RMS:16.9cm)测站上的检验结果.尽管这三个点位于高程较高的区间,但其邻近高程的其他点并未出现误差大于10cm的情况,并且除了这三个点整条曲线的波动并不大,这说明GPT2+Saas模型在这三个站出现较大误差的原因并不是高程改正不好.由于GZTDS的模型值与GGOS的ZTD 数据和IGS的ZTD数据都能很好吻合,这又排除了ZTD数据质量不好的可能,故更可能的原因是GPT2模型不能很好地反映这三处气象元素的实际变化规律,进而导致Saastamoinen模型计算ZTD不准确.通过图4也可以看出UNB3m模型在低高程区间的改正效果要差于在高高程区间的改正效果,这与我们之前的研究结果吻合.GZTDS模型在各高程区间表现非常平稳,且精度也明显优于UNB3m模型和GPT2+Saas模型,这进一步证实了GZTDS模型的优良性能.为了确定GPT2+Saas模型在三个点出现大误差的原因,我们利用2010年ECMWF的地表温度、气压和水汽压的格网数据,按照式(2)—(7)的方法将测站邻近四个格网点的气象数据改正到测站高度,然后利用双线性内插法得到测站位置处的温度、气压和水汽压,并与GPT2模型给出的结果进行比较,图5显示的是KOKV站上的ECMWF数据与GPT2数据对比曲线.图4 利用123个IGS站数据对四种模型的检验结果与高程的关系Fig.4 The relationship between the accuracy and the height from the test results with respect to the 123IGS stations由图5可以粗略地看出来自GPT2的气象数据曲线基本表征了ECMWF数据的变化规律,其他两个测站上也出现了近似的情况.表3统计了三个测站上对应气象数据较差(ECMWF-GPT2)的RMS.对式(8)和式(9)取一阶导数可以更好地显示天顶延迟误差与气象误差之间的关系,重力加速度近似值取9.80665m·s-2,温度近似值取280K,水汽压近似值取10hPa,可得:图5 来自ECMWF的KOKV测站上的地表温度、气压、水汽压与对应的来自GPT2模型的数据的比较(ECMWF数据用绿色曲线表示,GPT2模型的数据用红色曲线表示)Fig.5 Comparisons between temperature,pressure and vapor pressure from ECMWF data and that from GPT2model at IGS site KOKV (green curve represents ECMWF data and red curve represents data from GPT2model)表3 KOKV、LPAL和MAUI站上GPT2模型值相对于ECMWF气象数据的RMSTable 3 RMS of GPT2model with respect to the ECMWF data at IGS site KOKV,LPAL and MAUIRMS地表温度(K)气压(hPa)水汽压(hPa)KOKV 1.31 3.34 1.82 LPAL 2.13 6.23 1.78 MAUI 1.88 11.74 1.27δZWD=-0.16δT+4.53δe,(12)式(11)、(12)中的δZHD和δZWD的单位都是mm.将误差传播率应用于式(11)和式(12)并带入表3中的误差参数可以算出KOKV、LPAL、MAUI站上的气象误差分别可引起1.1cm,1.6cm和2.7cm的ZTD估计误差,这并不会导致GPT2+Saas模型产生超过10cm的误差.为了找到原因,我们直接利用这三个点邻近四个格网点上的ECMWF气象数据来计算ZTD,然后与直接来自GGOS Atmosphere的数据进行比对.分别计算了三个测站邻近四个格网点上Saastamoinen模型利用ECMWF数据计算的ZTD与GGOS Atmosphere的ZTD的差值的平均RMS,结果显示KOKV、LPAL、MAUI三个站邻近四个格网点的平均RMS分别为5.5cm,6.8cm和9.0cm,计算值与实测值差值较大,由于Saastamoinen模型本身具有较高的精度,这说明ECMWF气象数据本身在这三个点精度较差是导致二者差别较大的原因.考虑到GPT2经验气象参数相对ECMWF数据的差异又可引起1.1cm,1.6cm 和2.7cm 的ZTD估计误差以及超过1km的高程归化和平面内插等引起的误差,导致上述三个点产生超过10cm的误差是非常可能的,其中的主要原因应该是ECMWF数据在这三个点质量不佳.4 结论遵循传统对流层建模思路,我们利用GPT2模型来提供温度、气压和水汽压等气象参数,然后将这些参数带入Saastamoinen模型计算天顶对流层延迟,据此建立了精化的GPT2+Saas模型.采用新的对流层建模思路,我们直接针对ZTD的时空特性建模,利用GGOS Atmosphere 2001—2010年的数据直接构造了GZTDS格网模型.利用GGOS Atmosphere的格网数据对两种新模型进行了检验,并与UNB3m模型和GZTD模型进行了比较,给出了四种模型精度的时空分布,结果表明两种新模型的对流层延迟估计精度均明显优于UNB3m模型,其中GZTDS模型表现出最佳的精度和稳定性.利用IGS的ZTD数据对新模型进行检验,给出了客观实用的精度信息,相对于UNB3m模型,GPT2+Saas模型精度提升10%,GZTD模型精度提升15%,GZTDS模型精度提升27%,GPT2+Saas模型和GZTDS模型的高程改正效果也要优于UNB3m模型.针对GPT2+Saas模型在三个IGS站出现较大误差的情况,我们进行了深入分析研究,确定了ECMWF气象数据在这三点的质量不佳是导致误差较大的主要原因.严格的检验证实:直接对对流层延迟进行建模是一种可行且可靠的思路,相对于传统的建模思路,它更加简便并且精度和可靠性也表现出了优于同等传统模型的潜力,是一种值得推广的方法.致谢感谢ECMWF提供的气象数据、IGS提供的ZTD数据以及GGOS Atmosphere提供的ZTD数据.ReferencesBlack H D.1978. An easily implemented algorithm for the tropospheric range correction.Journal of Geophysical Research:Solid Earth (1978—2012),83(B4):1825-1828.Boehm J,Werl B,Schuh H.2006.Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data.Journal of Geophysical Research,111(B2),doi:10.1029/2005JB003629.Collins P,Langley R,LaMance J.1996.Limiting factors in tropospheric propagation delay error modelling for GPS airborne navigation.//Proceedings of the Institute of Navigation 52nd AnnualMeeting.Cambridge,MA,USA,519-528.Dee D P,Uppala S M,Simmons A J,et al.2011.The ERA-Interim reanalysis:Configuration and performance of the data assimilationsystem.Quarterly Journal of the Royal Meteorological Society,137(656):553-597,doi:10.1002/qj.828.Hopfield H S.1971.Tropospheric effect on electromagnetically measured range:prediction from surface weather data.Radio Science,6(3):357-367.doi:10.1029/RS006i003p00357.Lagler K,Schindelegger M,Böhm J,et al.2013.GPT2:Empirical slant delay model for radio space geodetic techniques.Geophysical Research Letters,40(6):1069-1073,doi:10.1002/grl.50288.Leandro R,Santos M C,Langley R B.2006.UNB neutral atmosphere models:development and performance.//Proceedings of the ION NTM 2006Monterey,California,USA,564-573.Li W,Yuan Y B,Ou J K,et al.2012.A new global zenith tropospheric delay model IGGtrop for GNSS applications.Chinese Science Bulletin,57(17):2132-2139,doi:10.1007/s11434-012-5010-9.Li W,Yuan Y B,Ou J K,et al.2015.New versions of the BDS/GNSS zenith tropospheric delay model IGGtrop.Journal of Geodesy,89(1):73-80.Li Z,Huang J S.2005.GPS Surveying and Data Processing(in Chinese).Wuchang:Wuhan University Press,66-68.Penna N,Dodson A,Chen W.2001.Assessment of EGNOS tropospheric correction model.The Journal of Navigation,54(1):37-55.Qu W J,Zhu W Y,Song S L,et al.2008.The evaluation of precision about Hopfield,Saastamoinen and EGNOS tropospheric delay correction model.Acta Astronomica Sinica (in Chinese),49(1):113-122. Saastamoinen J.1972.Introduction to practical computation ofastronomical refraction.Bulletin Géodésique,106(1):383-397.Yao Y B,He C Y,Zhang B,et al.2013.A new global zenith tropospheric delay model GZTD.Chinese Journal of Geophysics(in Chinese),56(7):2219-2227,doi:10.6038/cjg20130709.Yang Y,Yu G R,Pan S G,et al.2013.A comprehensive algorithmusing fusion of tropospheric delay models.Journal of Southeast University (Nature Science Edition)(in Chinese),43(Suppl.II):419-422,doi:10.3969/j.issn.1001-0505.2013.S2.043.附中文参考文献李征航,黄劲松.2005.GPS测量与数据处理.武昌:武汉大学出版社,66-68.曲伟箐,朱文耀,宋淑丽等.2008.三种对流层延迟改正模型精度评估.天文学报,49(1):113-122.姚宜斌,何畅勇,张豹等.2013.一种新的全球对流层天顶延迟模型GZTD.地球物理学报,56(7):2219-2227,doi:10.6038/cjg20130709.杨徉,喻国荣,潘树国等.2013.一种综合的对流层延迟模型算法.东南大学学报(自然科学版),43(增刊II):419-422,doi:10.3969/j.issn.1001-0505.2013.S2.043.。
几种对流层延迟改正模型的分析与比较
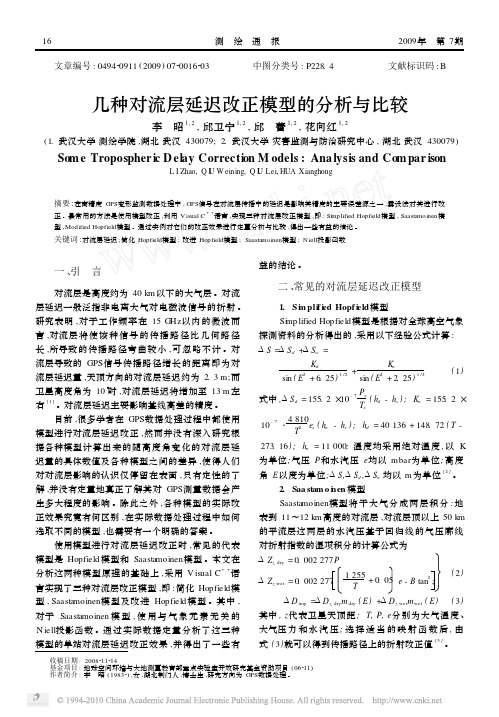
图 1 三种模型算得的 PRN26对流层延迟随高度 角变化图
摘要 :在高精度 GPS变形监测数据处理中 , GPS信号在对流层传播中的延迟是影响其精度的主要误差源之一 ,需设法对其进行改 正 。最常用的方法是使用模型改正 ,利用 V isual C + +语言 ,实现三种对流层改正模型 ,即 : Simp lified Hopfield模型 , Saastamoinen模 型 ,Modified Hopfield模型 。通过实例对它们的改正效果进行定量分析与比较 ,得出一些有益的结论 。 关键词 :对流层延迟 ;简化 Hopfield模型 ; 改进 Hopfield模型 ; Saastamoinen模型 ; N iell投影函数
5. 对于低高度角的情况 ( < 10°) ,如在 Saasta2 moinen模型中 ,可以使用对高度角更加敏感的全球 投影函数 GM F计算对流层延迟来提高 GPS测量高 程方向的精度 ,这些还需作进一步的研究 。
2. 当高度角 ≥35°时 ,简化 Hopfield模型求得的 结果小于 Saastamoinen模型 。
3. 当高度角 ≥15°时 ,三种模型求得的结果之间 符合得很好 ,改进的 Hopfield模型和 Saastamoinen模 型求得的结果完全一样 ,与简化 Hopfield模型求得的 结果差值很小 ,仅为几个毫米 ( 15°时差值最大 ,为 8 mm,其余均在 2mm左右 )。实际运用时 ,如果观测条 件好 ,截止高度角定为 15°,可任意选取这三种模型。
GNSS对流层延迟映射模型分析-上海天文台
384
天 文 学 进 展
32 卷
一个重要误差源;通常的解决办法是通过模型计算静力学延迟量作为已知值,将湿延迟作为 未知数解算 。 通常情况下电磁波传播路径并不是沿天顶方向, 因此需要将天顶方向延迟量映射到某一 倾斜的传播方向, 这就需要映射函数 (Mapping Function, MF), 倾斜方向的对流层延迟量是 干、 湿映射函数与天顶干、 湿分量的乘积之和, 关系式为: z (e) = zh × mfh (e) + zw × mfw (e) , (1)
[8−10]
。
GMF 映射函数同样是基于 ERA40 的月平均数据,采用类似建立 VMF1 模型的射线轨 迹法, 使用 1999 年 9 月—2002 年 8 月的数据确定映射参数 ah 和 aw , 参数 b, c 和 VMF1 相 同, 具体的计算程序在 VMF1 官网上也可以下载。而计算对流层延迟所需要用到的气象参数 则通过 GPT 模型获取。 GMF/GPT 模型是 VMF1 模型的简化, 精度略逊于 VMF1 模型; GMF/GPT 在计算上 更简便, 虽然 GPT 模型计算的 ZHD 有部分系统误差, 但正好可以补偿大气负荷的影响, 因 此在不改正大气负荷的时候 GPT 模型比基于 ECMWF 的 VMF1 模型精度略高 2.4 GPT2 模型 GPT2 模型是 Boehm 等人在 2012 年提出的一种新的对流层延迟经验模型 GMF/GPT 之间的差别
图1
本文所用测站分布
将总结近年来研究较多的 NMF、GMF/GPT 以及 VMF1 模型,然后介绍 Boehm 等人刚提 出的 GPT2 模型。 2.1
[5]ቤተ መጻሕፍቲ ባይዱ
NMF 模型 NMF 模型是 Neill 利用全球分布的 26 个探空气球站的资料建立的全球大气延迟投影函
不同对流层改正方法对 PPP 定位效果影响的对比分析
不同对流层改正方法对 PPP 定位效果影响的对比分析闫建巧;陈明剑;汪威;尹子明【摘要】对流层延迟是影响精密单点定位效果的一项重要误差源,不同的对流层改正方法直接影响 PPP的定位结果。
对比分析采用UNB3模型、Saastamoinen模型、ZTD参数估计3种方法对PPP定位精度和收敛时间的影响。
实验结果表明:3种模型平面改正精度和收敛时间基本一致。
天顶方向改正精度 UNB3模型与ZTD参数估计法基本相当,但两者优于Saastamoinen模型;收敛速度UNB3模型与Saastamoinen模型基本一致,ZTD参数估计法收敛速度较慢。
%T ropospheric delay is a major error in precise point positioning .Different troposphere correction model has an important influence on PPP positioning effect .This paper calculates the observation data of five IGS reference stations using UNB3 model ,Saastamoinen model and ZTD parameter estimation algorithm .T he convergence time and positioning accuracy of various models are compared in PPP position . T he results show that :the plane correction accuracy has no difference of the three models .Elevation correction accuracy of the ZTD estimation method is same as UNB3 ,but they are better than Saastamoinen .The convergence time of UNB3 has no difference with Saastamoinen ,however ,the convergence time of the ZTD estimation method is the worst .【期刊名称】《测绘工程》【年(卷),期】2016(025)004【总页数】5页(P28-32)【关键词】UNB3;Saastamoinen;ZTD;PPP;精度;收敛时间【作者】闫建巧;陈明剑;汪威;尹子明【作者单位】信息工程大学导航与空天目标工程学院,河南郑州 450001;信息工程大学导航与空天目标工程学院,河南郑州 450001;信息工程大学导航与空天目标工程学院,河南郑州 450001;信息工程大学导航与空天目标工程学院,河南郑州 450001【正文语种】中文【中图分类】P208精密单点定位(Precise Point Positioning,PPP)技术以其作业灵活、无需基准站、精度高、不受作用距离限制、经济高效等技术特点和优势已广泛用于卫星导航定位领域。
顾及高程影响的区域天顶对流层延迟改正模型
顾及高程影响的区域天顶对流层延迟改正模型周淼;刘立龙;张腾旭;张朋飞;黄良珂【摘要】利用美国南加州地区多个IGS站4年天顶对流层延迟(ZTD)数据,建立了一种不需要实测气象参数而只与测站高程和年积日有关的区域天顶对流层延迟模型。
新模型与基于ECMWF再分析资料和年平均气象参数下的Saastamoinen 模型相比,其稳定性和精度都优于Saastamoinen模型,且模型精度随高程的增加而增加。
使用新模型预测2012年南加州地区ZTD,其整体精度约为3.86 cm。
%In this paper,a new zenith tropospheric delay correction model is established by 4 years of ZTDs from IGS over Southern California,not requiring any meteorological data but related to the site elevation and the day of year.The new model is compared with the Saastamoinen model by ECMWF data and annual average me-teorological parameter when calculated the ZTD.The results show that the stability and precision of the new model are better than Saastamoinen model,and the precision increases with site elevation.The overall accuracy of the new model is about 3.86 cm when used to predict zenith troposhperic delays in 2012 in Southern Califor-nia.【期刊名称】《桂林理工大学学报》【年(卷),期】2014(000)004【总页数】5页(P723-727)【关键词】天顶对流层延迟(ZTD);区域对流层建模;高程影响;精度分析【作者】周淼;刘立龙;张腾旭;张朋飞;黄良珂【作者单位】桂林理工大学测绘地理信息学院,广西桂林 541004; 桂林理工大学广西空间信息与测绘重点实验室,广西桂林 541004;桂林理工大学测绘地理信息学院,广西桂林 541004; 桂林理工大学广西空间信息与测绘重点实验室,广西桂林 541004;桂林理工大学测绘地理信息学院,广西桂林 541004; 桂林理工大学广西空间信息与测绘重点实验室,广西桂林 541004;桂林理工大学测绘地理信息学院,广西桂林 541004; 桂林理工大学广西空间信息与测绘重点实验室,广西桂林541004;桂林理工大学测绘地理信息学院,广西桂林 541004; 桂林理工大学广西空间信息与测绘重点实验室,广西桂林 541004【正文语种】中文【中图分类】P228.490 引言随着卫星定位技术的迅猛发展,在实际应用中对定位精度的要求越来越高,而天顶对流层延迟是影响定位精度的关键性因素[1]。
精密单点定位中对流层延迟改正模型分析
做 对流层 折射 。对 流层 大气对 于直 至大 约 1 5GHz 的频 率呈 中性 , 号 在传 播 时 产 生 非 色散 延 迟 , 信 使 电磁 波传 播路 径 比几何 距 离 长 。 电磁 波 在 对 流层 的传 播速 度 只与大 气 折 射 率 和 电磁 波 的 传播 方 向
有关 , 与 电磁 波频 率无关 。在 天顶 方 向延迟 大约 而 为 2 3m, . 在高 度角 1 。 O时延 迟大 约 为 2 】 Om_ . ] 对 流 层延 迟 可 以分 为 湿分 量 和 干分 量 延 迟两 部分 。湿 分 量 延 迟 部 分 占 整 个 对 流 层 延 迟 的 1 。湿 分 量延 迟 主要 是 由地 平 面 以上 1 m 部 O 1k 分 的大气 层 引起 的 , 这部 分大 气层包 含 了大气 中的 大 部分水 汽 。由于水汽 密度 随位置 和 时间变 化 , 所 以, 湿分 量延迟 部 分很难 用模 型表示 。对 流层 的干 分 量延迟 占整个延 迟 的 9 。干 分 量延 迟 部 分是 0 由 1 m 以下 的干 空 气 引起 。这 部 分对 流 层 几乎 1k 没 有水汽 , 以 , 容易 用模 型表示 [ 。因此 , 所 很 2 ] 对流 层 延迟 可用 天顶方 向的干 、 分量延 迟及 其相 应 的 湿 投 影 函数表示
收 稿 日期 :2 1 7 1 0 卜O —2
式 中 : t 对流层 总延 迟 ;△ 为 天顶 方 向对 流 △ 为 层延迟 湿 分 量 ;A 岫为 天 顶 方 向对 流层 延 迟 干 分 量; M 为 相 应 的对 流 层 延 迟 湿 分 量 投 影 函 数 ;
Md 为相应 的对 流层延 迟干分 量投 影 函数 。
联 系 人 : 淑涛 E ma : a g h to @ 1 3 c r 逄 - i p n sua5 6 .o l n
常用对流层区域拟合模型的比较分析
的大 小决 定 了样 本 点 对 待插 值 点 的影 响程 度 。 当
1 CORS系统 对 流层 延 迟 改 正模 型
1 1 内插模 型 .
主 要 包 括 反 距 离 加 权 内 插 法 (D ) 及 在 此 IW 以
P值相 对较 小时 , 待插 值点远 的样 本点对 它 的影 离
候 通过 分析 比较 , 选取 较为合 适 的一 种 。
1 2 带有高 程 因子的 区域 拟合 模型 .
含 高程 影 响 因 子 的对 流 层延 迟 区域 拟合 模 型 是 指利用 基准 站上 的高 精度 对 流层天 顶延 迟值 , 采 用 带有高 程影 响 因子 的多项 式进 行最 小二乘 拟合 ,
∑
=1
d ∞一  ̄ ( , / 一 o + ( 一 0 。 ( f h ) ) ) 十 ^ — o ,
( i一 1 2, N ) , … () 3
作 为 C S系 统 的 主 要 误 差 源 之 一 , 高 精 度 定 OR 在
位 中必须 予 以改 正 。 目前 , O S系 统 中用 于 流动站 对 流层延 迟 的 C R 改正 模型 大致分 为两 类 : 内插模 型 和含高程 因子 的 区域 拟合模 型 。
式 中 : , , , 为样 本点 i 待插值 d。 —l 2 … N) ( 到
N
点的距离 , 且有 >: 一 1 ∞ 。
#i
由式 ( ) 以看 出, 着样 本 点 i 待插 值 点 3可 随 和
间距 离 的 增 加 , 本 点 i的 权 以 幂 P 减 小 。幂 P 样
在 反 距 离加 权 内插 法 中认 为 样 本点 和 待插 值 问 的水 平距 离和 高程差对 待插 值点 影 响是相 同的 , 即二者 等权 。然 而 , 流 动站 对 流 层 延迟 改正 中, 在
对流层几种改正模型分析及在LGO和Pinnacle中的应用
对流层几种改正模型分析及在LGO和Pinnacle中的应用周适【摘要】分析了几种常用的对流层延迟改正模型和对流层延迟的影响因素,在软件LGO和Pinnacle中运用不同对流层改正模型,对外业GPS测量得到的数据进行基线解算,比较不同对流层模型解算后的基线各分量,并得出一些有益的结论。
%Some commonly used tropospheric delay correction models are introduced. Baseline is obtained with LGO and Pinnacle to process surveying date, and some conclusions are obtained by comparing different tropospheric delay correction models.【期刊名称】《全球定位系统》【年(卷),期】2012(037)002【总页数】5页(P48-52)【关键词】对流层;基线解算;LGO;Pinnacle【作者】周适【作者单位】中铁二局集团公司测量中心,四川成都610031【正文语种】中文【中图分类】P228.40 引言对流层指从地面以上40km的范围,大气层中质量的99%都集中在对流层。
对流层延迟指GPS电磁波在穿过对流层时,其速度会随着温度、压力和相对湿度的变化而变化,从而引起信号延迟。
因而,必须引入对流层模型对信号延迟的部分进行改正。
对流层延迟可分为两部分:干分量引起的干延迟和湿分量引起的湿延迟。
干分量占总延迟90%左右,通过流体静力学建模可比较精确的预测,而湿延迟是由水汽引起的,由于在大气中分布的不确定性而只能通过非流体静力学来建模,所以较难预测。
几种经典而常用的对流层改正模型都是通过这两部分计算。
GPS基线解算软件有代表性的可解双频双星的两款软件:徕卡的LGO和拓普康的Pinnacle 软件。
LGO提供的对流层改正模型有以下六种:1)Hopfield模型;2)简化的Hopfield模型;3)Saastamoinen模型;4)Essen和Froome模型;5)无对流层模型;6)计算模型;Pinnacle提供的对流层改正模型有以下五种:1)无模型;2)Goad-Goodman模型;3)Niell模型(1996);4)Niell模型(2005);5)UNBabac模型(2003)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(E)aJ_z
£ " 3
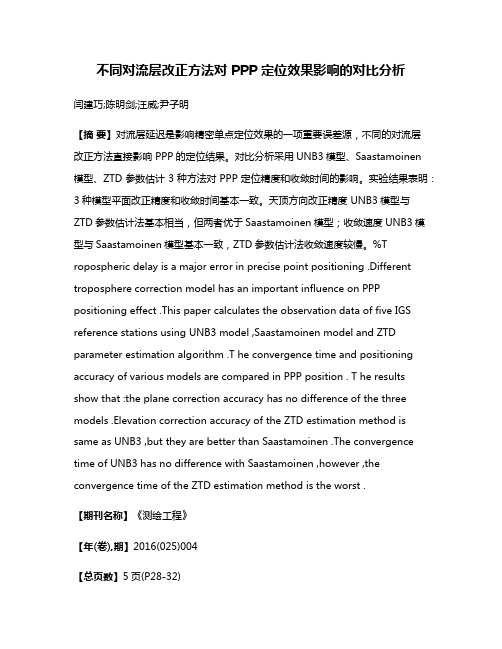
Temperature(C) 图2温度变化引起的天顶对流层延
3.2湿度影响 假设气压为标准大气压,温度为15°C,相对湿
度从0变化至100%,计算相对天顶对流层延迟, 如图3所示。可以看出,相对湿度变化与高差引起 的天顶对流层延迟量近似呈线性关系,而且高差越 大,相对湿度对残余天顶对流层延迟影响越大。
投影函数模型采用Neill建立的NMF模型,当 测站气象元素无法测得时,普遍的做法是根据测站 高程,利用如下公式推算测站气象元素叫
T = To-O.O65H
⑷
P =斥(1 一 0.0000226日严
_
RH = RH0 - exp(-6.393 lO-4^)-
和卫星数量以及卫星几何分布密切相关 ,在卫星分
乩严7H 1225 +。05卜」
zw"
(T + 273.16 丿
式中,T、P、e分别为测站气象元素温度、大气压 和水汽压,°、h为测站纬度和高程,
= l —0.00266 cos(2卩)—0.00028 / ,水 汽压可以通过相对湿度求得孔
“6.108•胆•/皿八4684.0]
⑶
I r-38.45 )
布均匀,截止高度角为15度时,1mm的对流层延误 差对基线垂直方向造成约为3. 2mm的误差叭 利用 经验模型改正对流层延迟误差是一种较常用的方
法,普遍使用的对流层经验改正模型包括Hopfield 模型、Saastamoinen模型,两者各有优势,但都需 要输入气温7、气压P和水汽压e三个气象元素进 行计算,本文选用Saastamoninen改正模型血进行
对流层延迟公式可表示如下:
S') + § Must E^) § trop- & Zdry -^ry (
Zwet
(
(1)
式中,Crop为对流层延迟项,肌血为天顶干延迟分 量,§Zwet为天顶湿延迟分量,Mry (①、Met (Q分
素为:7S=15°C,A=1013. 25mbar,砒=0. 5 参考站高 程为50m,流动站的高程从50m升至1050m,利用 标准大气模型,计算出流动站和参考站的气象元素,
式中,〃为测站高程,T、P和朋表示测站的温度、 压强和相对湿度,7i、A和册表示测站天顶方向海 平面的温度、压强和相对湿度。 3影响因子分析
对流层延迟效应由大气折射引起的,气象元素会 影响折射系数的大小,因此载波信号传播过程中的对 流层延迟和气象元素高度相关⑷。本文首先从高差的
角度,利用标准大气模型,通过模拟数据分析差分定
假设大气压为标准大气压,相对湿度为50%, 温度从-60°C变化至60°C,计算相对天顶对流层延 迟,如图2所示。可以看出,当温度小于-10°C左右 时,温度变化对结果几乎没有影响,但随着温度继 续升高,温度变化对残余的天顶对流层延迟影响越 来越大。而且高差越大,温度对残余天顶对流层延 迟影响也越大。
0.20
0.18
0.16
0.14
0.12
0.10Biblioteka 0.080.060.04
0.02 0
20
40
60
80
100
相对湿度(%)
图3相对湿度变化引起的天顶对流层延迟
3. 3气压影响 假设温度为15°C,相对湿度为50%,气压从
960mbar变化至1060mbar,计算相对天顶对流层延 迟,如图4所示。可以看出,大气压变化与高差引 起的天顶对流层延迟量也近似呈线性关系,但相对 于温度和湿度的影响,大气压变化造成的影响要小 得多。高差越大,气压对残余天顶对流层延迟影响 也越大。
86技术交流
测绘技术装备 第21卷2019年第3期
对流层延迟经验模型改正影响因子分析
李业坤吴丰波
(佛山市测绘地理信息研究院广东佛山528000)
摘 要:本文详细介绍了 Saastamoinen对流层延迟改正经验模型,通过对经验模型的影响因子分析,得出 高差对基线解算的残余对流层延迟影响较大,并从温度、相对湿度、大气压三个方面,模拟其变化和高差对
再代入Saastamoninen模型中,得出参考站对流层 延迟dtropB,流动站对流层延迟"tropR,记△ ^trop为相 对对流层延迟。
别为干延迟和湿延迟投影函数。采用
A dtfop= "tropR— dtfopB
(5)
Saastamoninen 模型:
0.002277
q
k /(以)*
_(2)
对流层延迟的共同影响,分析得出温度变化对对流层延迟影响最大.通过一组实例数据,分析了对流层延迟
经验模型在对流层延迟改正中的应用效果°
关键词:GNSS Saastamoinen模型对流层延迟影响因子
1引言 利用GNSS技术进行变形监测时,基线两端气
象条件差异不大时,对流层延迟高度相关,通过差 分可减弱对流层误差。但当基线较长或高差较大时, 基线两端气象条件差异增大,对流层延迟仅通过差 分技术消除仍残余较大。天顶方向对流层延迟误差
分析。Saastamoninen模型由加拿大学者 J. Saastamoninen早在1972年提出的,是目前公认 的一种精度较高的对流层延迟改正模型。
位中对流层延迟效应。然后分别从温度、压强和大气 压的变化分析差分定位中对流层延迟的影响。
在进行影响因子分析时,假定海平面的气象元
2 Saastamon i nen对流层延迟改正模型
图1不同高差下的对流层延迟
测绘技术装备 第21卷2019年第3期
技术交流87
表1不同高差下的对流层延迟(单位:m)
H.D R.ZTD H.D R.ZTD
100 0. 057 600 0.218
200 0. 099 700 0. 244
300 0. 133 800 0. 270
400 0.164 900 0. 295
500 0. 192 1000 0. 320
从图1和表1可以看出,高差达到约100m时, 在标准气象元素下,天顶方向的相对对流层延迟误 差就达到了 5cm,这将使定位结果产生约5mm的平 面位置误差,高程方向误差会达到10cm以上间。当 前普遍做法是无论长短基线,都会先通过经验模型, 根据标准大气模型进行改正,当无法获得测站实时 气象元素时,可用标准气象元素代替间。然而,标 准气象元素和实际值有一定差异,这种差异将导致 相对对流层延迟估算的偏差。下面就分别从温度、 湿度和压强三个方面,通过实验分析其对对流层估 算的影响。 3.1温度影响