柔顺机构的分析与设计
无铰链柔顺机构拓扑优化设计

找到柔顺机构中柔度和刚度之间较为合适的平衡点"提出如
采用基于 K#UH方法的传统拓扑优化模型来设计柔顺机
构时"其最优拓扑 形 式 通 常 存 在 些 许 不 足" 以 反 向 位 移 机 构
为例"最终优化结果如图 ) 所示!
*
Copyright©博看网 . All Rights Reserved.
科技创新
科技风 &'&( 年 ) 月
与输入端位移的比值最大化"即机构的几何增益 ;<T$+),=$"# 最大化$ 柔顺机构除了要具备一定的柔度来完成预期的工
作外"还应保证自 身 具 有 一 定 的 刚 度 来 抵 抗 外 力" 保 持 自 身
的稳定性$ 如图 (> 所示"当优化模型的输出端 4被固定时"
机构自身就具备了一定的刚度来限制输入端的位移$ 为了
虚铰的产生$ ]\8等%'& 通过控制结构中构件的尺寸"提出了
无铰链式柔顺机构水平集方法$ E6Z-B等%$%& 将制造性约束
引入到优化模型中"来消除柔顺机构中难以制造的虚铰$
然而"在保证柔 顺 机 构 输 出 最 大 化 的 同 时" 其 刚 度 无 法
进行有效的保障"具有较大的随机性$ 因此"提出一种具有
)&) 基于 K#UH方法的改进拓扑优化模型
4 (Z444444444444(>
4
(,444444444444(S
图(
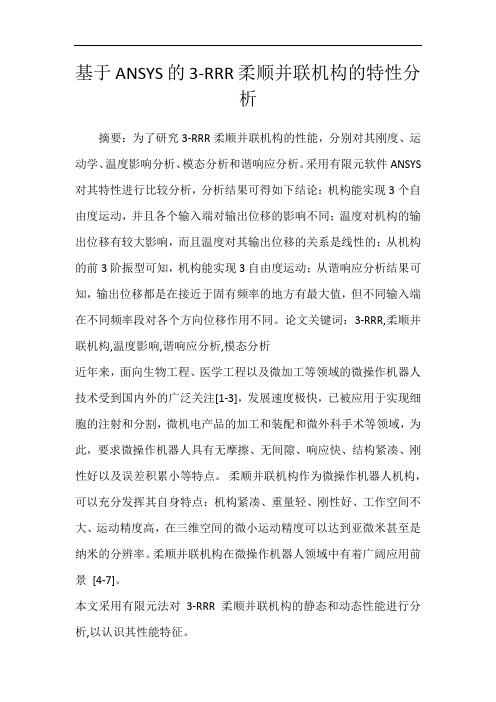
如图 (Z所示"&为给定载荷和边界条件的基本设计域$
假设 !"# 为输入端 "处的输入力"!+),为具有刚度为 1:的弹簧 在输出端 4处模拟其他工件对柔顺机构施加的反作用力$ 以
一种柔顺恒力机构

一种柔顺恒力机构
(原创实用版)
目录
1.柔顺恒力机构的定义与特点
2.柔顺恒力机构的应用领域
3.柔顺恒力机构的优势与局限性
4.柔顺恒力机构的发展前景
正文
一、柔顺恒力机构的定义与特点
柔顺恒力机构,是一种具有恒定输出力矩、可调速、可控位姿的新型传动装置。
其主要特点是能够在高速运行过程中保持恒定的力矩输出,同时具备良好的运动平稳性和抗冲击能力。
柔顺恒力机构的核心技术主要体现在其结构的创新设计以及先进的控制策略上。
二、柔顺恒力机构的应用领域
柔顺恒力机构广泛应用于工业机器人、自动化生产线、精密传动等领域。
在工业机器人领域,柔顺恒力机构可以提高机器人的运动精度和运动平稳性,提高其工作效率和可靠性;在自动化生产线上,柔顺恒力机构可以实现精确的力控制,保证生产线的稳定性和产品质量;在精密传动领域,柔顺恒力机构可以提供恒定的力矩输出,确保精密设备的运行精度和稳定性。
三、柔顺恒力机构的优势与局限性
柔顺恒力机构具有以下优势:1.恒定的力矩输出,保证了运动过程中的稳定性;2.可调速、可控位姿,满足不同工况的需求;3.良好的运动平稳性和抗冲击能力,提高了设备的使用寿命和可靠性。
然而,柔顺恒力机构也存在一定的局限性:1.结构设计复杂,制造成
本较高;2.控制策略较为复杂,需要专业的技术支持;3.对于高负载、高速运行的场合,其性能有待提高。
四、柔顺恒力机构的发展前景
随着科技的进步和社会的发展,对柔顺恒力机构的需求将越来越大。
基于ANSYS的3-RRR柔顺并联机构的特性分析
基于ANSYS的3-RRR柔顺并联机构的特性分析摘要:为了研究3-RRR柔顺并联机构的性能,分别对其刚度、运动学、温度影响分析、模态分析和谐响应分析。
采用有限元软件ANSYS 对其特性进行比较分析,分析结果可得如下结论:机构能实现3个自由度运动,并且各个输入端对输出位移的影响不同;温度对机构的输出位移有较大影响,而且温度对其输出位移的关系是线性的;从机构的前3阶振型可知,机构能实现3自由度运动;从谐响应分析结果可知,输出位移都是在接近于固有频率的地方有最大值,但不同输入端在不同频率段对各个方向位移作用不同。
论文关键词:3-RRR,柔顺并联机构,温度影响,谐响应分析,模态分析近年来,面向生物工程、医学工程以及微加工等领域的微操作机器人技术受到国内外的广泛关注[1-3],发展速度极快,已被应用于实现细胞的注射和分割,微机电产品的加工和装配和微外科手术等领域,为此,要求微操作机器人具有无摩擦、无间隙、响应快、结构紧凑、刚性好以及误差积累小等特点。
柔顺并联机构作为微操作机器人机构,可以充分发挥其自身特点:机构紧凑、重量轻、刚性好、工作空间不大、运动精度高,在三维空间的微小运动精度可以达到亚微米甚至是纳米的分辨率。
柔顺并联机构在微操作机器人领域中有着广阔应用前景[4-7]。
本文采用有限元法对3-RRR柔顺并联机构的静态和动态性能进行分析,以认识其性能特征。
2 3-RRR柔顺并联机构3-RRR平面柔顺并联机构示意图如图1所示,它是由3个RRR运动支链组成,各个运动关节为柔性铰链,可以实现动平台和方向的平动及绕轴的转动。
驱动端为压电陶瓷驱动器作用位置。
对于柔顺并联机构而言,柔性铰链的选择与设计是整个机构设计的关键。
采用正圆形柔性铰链作为机构的运动副,其结构尺寸如图2所示,mm、mm、mm。
由于柔顺机构依靠材料的弹性变形产生运动,这种变形的大小受到材料许用应力的限制,而许用应力的大小又直接与材料的疲劳强度有关,则材料需要有较长的疲劳寿命才可能正常地执行其功能。
一种新型柔顺机构设计方法的研究

ndt a h r o u g ht h e s o l u t i o no ft h e p r o b l e s m i t C nf a in dt h e o p t i ma l es d i g ni nt e h es d i n d g o m a i n .
对设计域 内的柔顺机构建立 了拓扑优化设计的数 学模型, 从 而可以通过数 学模型的求解找到设计域 内最优的设计方法。
关键 词 : 柔 顺机 构 ; 连接器; 梁单 元 ; 有 限 元建 模 ; 拓 扑优 化 设计
中图分类号 : T H1 6 ; T H1 3 2
文献标识码 : A
文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 3 — 0 0 0 7 — 0 4
Ke yW o r d s : Co mp l i a n t Me c h a n i s m; T h eCo n n e c t o r ; B e a m El e me n t ; F i it n e El e me n t Mo d e l i n g ; To p o l o g yOp t i mi z at i o n
一种全柔顺六稳态机构的设计

l o we r p o we r c o n s u mp t i o n , nd a S O o n , b u t n l e y a l e d i f ic f u l t t o d e s i g n b e c a u s e o f t h e s t r e s s c o n c e n t r a t i o n nd a n o n l i n e a r c h a r a c t e is r t i c s
平面柔顺四杆机构的驱动特性分析
平面柔顺四杆机构的驱动特性分析王雯静余跃庆北京工业大学,北京,100124摘要:基于伪刚体模型法,分析研究了平面柔顺机构的驱动特性问题。
以平面柔顺四杆机构为研究对象,建立其伪刚体模型。
通过对该模型的动力学分析,得到了一种柔顺机构驱动力矩计算的新方法。
算式表明柔顺机构的驱动特性与机构中柔性铰链之间存在着内在关系。
根据算例分析结果可知,通过改变柔性铰链的刚度以及各柔性铰链未变形时的初始位置能减小机构的最大驱动力矩。
关键词:柔顺机构;伪刚体模型;柔性铰链;驱动特性中图分类号:T H112 文章编号:1004—132X (2009)02—0127—04Driving Characteristics Analysis of Planar Compliant MechanismsWang WenjingYu YueqingBeijing University of Technology ,Beijing ,100124Abstract :Driving characteristics of planar compliant mechanisms were st udied based on t he p seudo -rigid -body model herein.A planar four -bar compliant mechanism was taken as an example to analyze ,t he p seudo -rigid -body model of t his mechanism was developed at first.A new met hod for calculating t he driving torque was t hen obtained based on t he dynamic analysis of compliant mechanism ,and it shows t hat t he flexible hinges have impact on t he driving characteristics of compliant mechanisms.The result s of example indicate t hat t he peak driving torque is minimized by modifying t he stiff ness and t he unst rained positions of t he flexure hinges.K ey w ords :compliant mechanism ;p seudo -rigid -body ;flexural hinge ;driving characteristics收稿日期:2008—01—04基金项目:国家自然科学基金资助项目(50875002);北京市自然科学基金资助项目(3062004);北京市属市管高等学校人才强教计划资助项目(P HR (IHLB ));北京市教委科技发展计划资助项目(KM200610005003)0 引言柔顺机构是一种利用构件自身的弹性变形来完成运动和力的传递和转换的新型机构。
一种单自由度柔顺铰链的优化设计

柔顺机构是在驱动力作用下,通过自身柔性构件的弹性变形实现力和能量传递,并获得部分或全部运动的一类机构[1]。
相对于传统的刚性机构,柔顺机构在运动过程中没有摩擦与磨损,体积小、质量轻、加工简单、没有装配误差等优势。
因此,在精密定位、高速刀具、微夹持操纵等领域应用广泛[2-4]。
张建锐建立了柔顺储能J/S 型机构的伪刚体模型,分析了其刚度特性[5]。
马力设计了一种3自由度运动平台,实现了纳米级的定位[6]。
胡俊峰应用伪刚体模型设计了一种零刚度柔顺微动平台,该机构实现了在0.6mm~1.7mm 运动范围内输出力几乎无变化[7]。
凌明祥通过柔性梁的动刚度矩阵与矩阵位移法相结合[8],建立了柔顺机构的伪静态模型,这种模型可以实现静/动力学同时建模[8]。
本文应用柔性梁的动刚度矩阵,建立了一种单自由度柔顺铰链的伪静态模型,分析了其静力学与动力学行为。
通过优化柔顺铰链的尺寸,可以得到试用于不同工作状态的柔顺铰链模型。
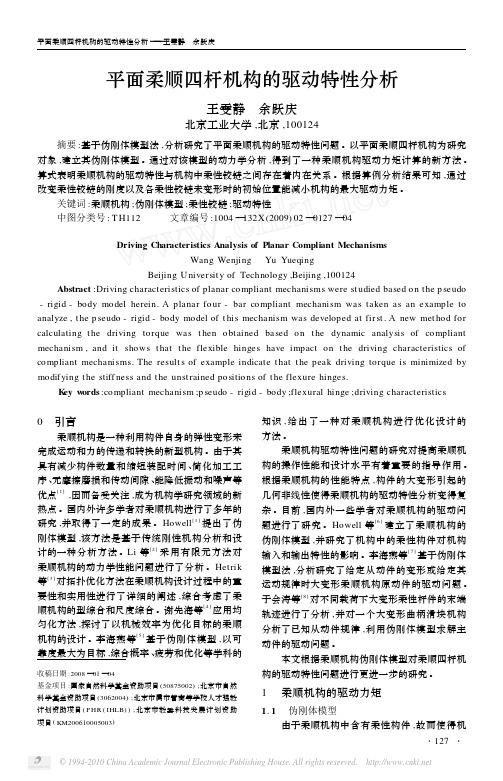
1柔顺铰链机构理论模型的建立柔顺铰链的模型如图1所示,四根柔性梁固定在两端,中间是一个不能忽略质量的运动平台。
通过力f 使柔性梁产生变形,从而产生了位移u 。
结构是完全对称的,这可以消除柔性梁变形时产生的x 方向平动位移与z 方向的转动位移。
如图2所示,在局部坐标系下柔性梁单元有j 、k 两个节点,每个节点有沿着x 、y 方向移动和绕着z 方向转动三个方向自由度。
将梁单元在局部坐标系下所受力与位移用向量的形式表示:F jk =f j jk ,xf jjk ,ym jjk ,zf kjk ,xf kjk ,ym kjk ,z[]T U jk =u jjk ,x u jjk ,y u jjk ,θu kjk ,x u kjk ,y u kjk ,θ[]T那么在局部坐标系下,节点力与位移的关系为:F jk =K jk U jk(1)K jk 为柔性梁在局部坐标系下的动刚度矩阵:K jk =d 100-d 5000d 2-d 30d 6d 70-d 3d 40-d 7d 8-d 500d 100d 6-d 70d 2d 3d 7d 8d 3d 4⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥(2)图2局部坐标系下柔性梁力分解f j y (u jy )m k θ(u kθ)f jx (u jx )f k y (u ky )f k x (u kx )m jz (u jθ)j k图1柔顺铰链模型L Xh Y utfO w收稿日期:2020-03-05;修订日期:2020-04-15作者简介:王欣(1992-),女,硕士,专任教师,从事数字化设计研究。
柔性机构控制技术研究

柔性机构控制技术研究一、引言柔性机构控制技术是现代制造工业中的核心技术之一,可以广泛应用于机械、电子、生物和医疗器械等领域。
其原理是使用柔性机构作为一种变形机构,控制变形产生的运动,可以替代传统机构中的刚性连接部件,具有结构简单、可靠性高、运动精度高等优点。
本文将从柔性机构的概念、结构及分类入手,讨论柔性机构控制技术的研究现状以及未来发展方向,旨在为柔性机构控制技术的研究和应用提供参考。
二、柔性机构的概念、结构及分类1、概念柔性机构是指由柔性材料(如弹性材料)构成的变形机构,可以根据不同的外力输入产生形变或运动。
与传统的刚性链接机构相比,柔性机构具有结构简单、可实现变形控制、低噪声、低能耗和低成本等优点,逐渐成为制造工业中的研究热点。
2、结构柔性机构由柔性杆、柔性膜、柔性板、柔性套等基本构件组成,这些构件受到外部力作用时会发生弯曲、拉伸、压缩等变形。
在柔性机构中,这些基本构件可以通过特定的拓扑关系组合在一起形成不同的机构结构,实现不同的任务。
3、分类根据柔性机构的不同形变特点,可以将其分为以下三类:(1)拉伸型柔性机构:在拉伸方向会发生明显的形变或运动,如柔性弯管、柔性卷绕展开机构等;(2)弯曲型柔性机构:在弯曲方向会发生明显的形变或运动,如柔性四杆机构、柔性扭转杆等;(3)膜状型柔性机构:由柔性薄膜构成的机构,可以在平面内实现角位移、平移运动或压缩变形,如柔性膜手术机器人、柔性膜致动器等。
三、柔性机构控制技术研究现状柔性机构控制技术的研究主要包括结构设计、变形控制方法和运动规划等方面。
近年来,国内外学者对柔性机构控制技术作了深入研究,取得了一系列重要成果。
1、结构设计在柔性机构中,结构设计是决定其性能的关键因素。
国内外学者提出了一系列柔性机构的设计方法,如优化设计、拓扑优化、材料选择等。
此外,生物学与仿生学的发展也对柔性机构结构的设计提供了新的思路与范例。
2、变形控制由于柔性机构具有高度的非线性和复杂性,在控制方面也存在一定难度,需要研究特定的控制方法,如模糊控制、神经网络控制、自适应控制等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
组员:付 帅 卢 云 张俊飞 周 杰
传统机构VS柔顺机构
机构是用来进行运动,力或能量传递或转换 的机械装置。 传统刚性机构是由运动连接刚性杆组成的。因 为能量在输入和输出之间守恒,因此输出力可能比输 入力要大得多,但输出位移要比输入位移小得多。 柔顺机构也能传递或转换运动、力或能量,但与 刚性机构不同,柔顺机构不仅由运动副传递运动,还 至少从其柔性部件的变形中获得一部分运动。
下表1列出了一些材料的屈服强度、杨氏模量以及强度 与弹性模量的比值。
无论合金中加入什么元素或者进行何种热处理,大多数金属的 杨氏模量基本保持不变。
值得注 意
表1 一些材料的屈服强度与弹性模量之 比
例如,表1中列出的低强度钢和高强度钢具有相同的 弹性模量。当材料进行热处理或者冷加工时,其屈服 强度和拉伸强度都会增加,材料也会变得更脆。这时, 像裂缝、凹陷、空隙和杂质等缺陷问题就显得更加重 要,还要考虑机构的失效和对应力集中的敏感度等问 题。 具有最高强度与杨氏模量之比的材料能在失效前获得 更大的变形,它是在柔顺机构的材料选择上最重要的 参数之一。
柔顺机构主 要有以下两种类型: ①以柔性铰链为主要 特征的柔顺机构。 ②以柔顺杆为主要特 征的柔顺机构。
以柔顺杆为主要特征的柔 顺机构则是依靠机构中较 薄的柔顺杆的弹性变形来 进行运动或力的传递和转 换。主要用于轻型化机构, 如:柔顺超越离 合器、柔顺卷边机构等
以柔性铰链为主要特 征的柔顺机构是依靠 机构中柔性铰链中间 较为薄弱的部分在力 矩作用下产生较明显 的弹性角变形来完成 运动或力的传递和转 换。主要用于精密测 量仪器,如:陀螺仪、 加速度计记录仪、表 面控制、调制器、阀、 计算机等
(11) 末端有力矩作用的梁的末端转角为 (12) 整理可求出M为 (13)
比较式(11)和(12),并注意M =T和θ=Θ,可知弹簧常数为
(14)
式中E——材料的弹性模量; I—— 截面惯性矩,I 1 t 3 ,t 为短臂柔铰的厚度,w为柔铰的宽 12 度。
如果柔铰中的弯曲时主要载荷的话,这一模型就更加精确, 如果横行和轴向载荷比弯曲力矩大,则会给此模型引入较大 的误差。由于在推导过程中没有做小变形假设,因此在纯弯 曲情况下,即使是对大变形来说,式(3)至(5)仍然是精 确的。这正是此简单模型的一个优点。
基于这个原因,柔顺段上几乎 任何点作为特征铰链的安放处都是 能够接受的,而中点用起来比较方 便。
伪刚体杆的角度称为伪刚体角。对于短臂柔铰, 伪刚体角等于梁末端角Θ
(短臂柔铰) 梁的末端的x和y坐标(分别用a和b表示)可近似为 (7) (6)
及
(8)
或表示成无量纲形式为
a 1 L 1 cos b 2 l 2
本课程以柔性铰链为主要特征的柔顺机构为研 究对象,进行分析计算
最常 见的 柔性 铰链
1.短臂柔铰 2.椭圆形柔性铰链 3弓形柔性铰链 4。倒圆角直梁形柔性铰链
短臂柔铰
如图a所示的悬臂梁,它有两段,一段短而柔,而另一段则长而硬。 如果短段比起长段足够短而且柔软得多,即
(1) (2) 则称短臂为柔铰
其他准则
在柔顺机构的材料选择上,强度与杨氏模量之比很重要, 而其他一些重要准则也需要考虑。根据不同的应用场合, 其准则也不一样。
金属
等,需
在柔顺机构中选用金属,如钢、不锈钢、铝、钛 要考虑以下方面: ①材料特性要可预测(在精密仪器中需要); ②在高温环境中有良好表现; ③可与其他金属兼容; ④对蠕变不敏感; ⑤有更好的疲劳寿命预测; ⑥能在恶劣的环境中工作;
(9) (10)
和
b L 1 sin l l 2
对于给定的角变形,所求的近似梁的刚性不封将 会是平行的这使得分别用两种方法确定出的轨迹 点之间的距离与刚性部分两端点间的距离相等, 此距离d随l的减小而减小,如图c
图c
为了建立以柔性铰链为主要特征的柔顺机构动力学模型,首先必须 对柔性铰链的刚度进行分析,进而可以得到机构的势能。如图b)所 示,梁的抗变形能力可用以弹簧常数为K的扭簧来模拟。使扭簧产 生角变形为Θ的力矩为
柔顺机构优化设计之材料选择
研究柔顺机构动力学问题的主要目的:
为了设计出满足预定性能要求的柔顺机构。
1.根据柔顺机构的特点对机构的材料选择方面进行讨论 (本文涉及); 2.以柔性铰链刚度最小为目标,对以柔性铰链为主要特征 的柔顺机构进行优化设计; 3.分别以柔顺机构总质量最小、总变形能最大为优化目标, 进行了以柔顺杆为主要特征的柔顺机构优化设计。
在柔顺机构中选用金属有以下缺点:
①材料成本高; ②制造或加工材料的成本高; ③需要大量的零件装配; ④与许多聚合物相比,其强度模量比低。
塑料
虽然每磅塑料的成本与钢材相当,但像注模等加工方法 使得塑料成形的费用比其他材料要低得多,再加上其高 强度模量比,是塑料大量应用于柔顺机构中的主要原因。 在柔顺机构中使用塑料有以下优点:
对端点受一力矩作用的柔顺段,其变形方程为
(3) (4)
(5)
这可以用来定义短臂柔铰的简单伪刚体模型。由 于柔顺部分比刚性部分短得多,此系统的运动用被称为特征 铰链连接的两根刚性杆来模拟,如图b所示,特征铰链位于 柔性铰链的中点。
因为变形仅发生在比刚性 部分短得多的柔顺部分,所以 这种假设是准确的。
最大应力发生在固定端, 力矩为 M max =FL, c=h/2
图d 柔顺悬臂梁
由此得到最大应力为
考虑到当最大应力到达屈服强度 Sy 时,梁发生失效,即
整理得到梁在失效前所承受的最大变形为
由此可以表明,最大变形与几何尺寸L2 /h和材料参数 S /E都 有关。
Y
从上述分析可知,当强度与弹性模量的比最大时,材 料的变形最大。
①制造成本大大降低; ②高强度模量比; ③可机加工; ④可大大减少部件的装配; ⑤密度小; ⑥可与其他塑料兼容; ⑦绝缘性好。 使用塑料的缺点有: ①力学性能的易变性使得塑料比其他材料更难预测; ②熔点温度低; ③在一些环境中材料易退化; ④有蠕变和应力松弛; ⑤给人感觉廉价或不耐用;
柔顺机构的优点
柔顺机构是一种利用构件自身的弹性变形来完成运动和力 的传递与转换的新型机构,具有许多传统机构所没有的优点。
பைடு நூலகம்
柔顺机构优点
减少机构数量和 装配时间
简化加工工序,降低 振动和噪音
无摩擦损耗和运 动副间隙
伪刚体模型法
伪刚体模型的目的就是提供一种能够分析经受非线性大变形 系统的简单方法。
将自由端受力的悬臂梁等效为铰接在一起的刚性构件,并在 关节处加一个扭转弹簧,由此得到悬臂梁末端受力载荷作用时的 伪刚体模型,用来分析悬臂梁末端的运动轨迹以及运动与力的关 系。根据椭圆积分计算出模型中γ 、a、b和θ0max等参数的值。
另外,很重要的一点就是可以通过调整几何尺寸和材料性质使得构件 变得更富有柔性。
与大多数机械装置或结构不一样,对于柔顺机构,是选择具有最大柔性而不是 最大刚度的材料。
注意 区别
变形准则
如下图d所示的矩形截面悬臂梁。对于矩形横截面,自 由端的变形
式中E——材料的弹性模量; L——柔顺杆杆长; b——柔顺杆宽度; h——柔顺杆厚度。
下面主要讨论柔顺机构设计过程中选择材料时应该考虑的问题。
材料的选择
首先,讨论柔顺机构在材料选择时应考虑的一些因素。
有许多不同类型的材料都可以用到柔顺机构的设计中。虽然每一 种应用场合都有其选择材料的准则,但选择过程却应遵循能适用于多 数情况的原则。刚度和强度不是一回事,把一件东西做得既柔软又坚 固是完全可能的。延展性与柔性也不相同,只要几何尺寸适当,不出 现过应力状况,脆性材料也可以用来制造柔顺机构。