自回归模型AR详解哦
脑电的自回归(AR)模型

10.1.2 几类重要的随机序列参数模型
输入为白噪声的线性系统,输入u(n)和输出x(n)的关系
q
p
q
x(n) ak x(n k) bku(n k)
k 1
k 0
1
H(z)
1
bk z k
k 1 p
ak zk
B( z ) A( z )
b0=1
①自回归模型(auto-regressive,AR模型):b1,b2k,1 …,bq全为零
a2
M M M M M M
rx (p) rx (p-1) rx (p-2) L
rx (0)
a
p
2
0
=
0
M
0
Levinson-Durbin(L-D)递推算法 :
rx (m) rx (m)
定义 am (k )为p阶AR模型在阶次为m(m=1,2,…,p)时的第k个参数(k=1,2,…m)
k 1
10.2 AR模型
一个p阶的AR模型构成一个p阶的线性预测器
p
x(n) k x(n k)
k 1
p
rx (m) k rx (m k) k 1
p
min E{x(n)[x(n) x(n)]} rx (0) krx (k)
k 1
该预测器的最小均方误差等于AR模型激励白噪声的能量。
(Niedermeyer E. and da Silva F.L. 2004)
背景 脑电 EEG
随机序列(数据)
自回归(AR)模型
参数模型
生物系统的数学模型??
基于实验数据建模
背景
➢ 基于实验数据的建模包含三个要素:
自回归AR模型、移动平均MA模型与自回归移动平均ARMA模型的比较分析

自回归AR模型、移动平均MA模型与自回归移动平均ARMA模型的比较分析系统中某一因素变量的时间序列数据没有确定的变化形式,也不能用时间的确定函数描述,但可以用概率统计方法寻求比较合适的随机模型近似反映其变化规律。
(自变量不直接含有时间变量,但隐含时间因素)1.自回归AR(p)模型(R:模型的名称 P:模型的参数)(自己影响自己,但可能存在误差,误差即没有考虑到的因素)(1)模型形式(εt越小越好,但不能为0:ε为0表示只受以前Y的历史的影响不受其他因素影响)yt=φ1yt-1+φ2yt-2+……+φpyt-p+εt式中假设:yt的变化主要与时间序列的历史数据有关,与其它因素无关;εt不同时刻互不相关,εt与yt历史序列不相关。
式中符号:p模型的阶次,滞后的时间周期,通过实验和参数确定;yt当前预测值,与自身过去观测值yt-1、…、yt-p是同一序列不同时刻的随机变量,相互间有线性关系,也反映时间滞后关系;yt-1、yt-2、……、yt-p同一平稳序列过去p个时期的观测值;φ1、φ2、……、φp自回归系数,通过计算得出的权数,表达yt 依赖于过去的程度,且这种依赖关系恒定不变;εt随机干扰误差项,是0均值、常方差σ2、独立的白噪声序列,通过估计指定的模型获得。
(2)识别条件当k>p时,有φk=0或φk服从渐近正态分布N(0,1/n)且(|φk|>2/n1/2)的个数≤4.5%,即平稳时间序列的偏相关系数φk为p步截尾,自相关系数rk逐步衰减而不截尾,则序列是AR(p)模型。
实际中,一般AR过程的ACF函数呈单边递减或阻尼振荡,所以用PACF函数判别(从p阶开始的所有偏自相关系数均为0)。
(3)平稳条件一阶:|φ1|<1。
二阶:φ1+φ2<1、φ1-φ2<1、|φ2|<1。
φ越大,自回归过程的波动影响越持久。
(4)模型意义仅通过时间序列变量的自身历史观测值来反映有关因素对预测目标的影响和作用,不受模型变量相互独立的假设条件约束,所构成的模型可以消除普通回归预测方法中由于自变量选择、多重共线性等造成的困难。
AR,MA,ARIMA模型介绍及案例分析

BOX-JENKINS 预测法1 适用于平稳时序的三种基本模型(1)()AR p 模型(Auto regression Model )——自回归模型p 阶自回归模型:式中,为时间序列第时刻的观察值,即为因变量或称被解释变量;,为时序的滞后序列,这里作为自变量或称为解释变量;是随机误差项;,,,为待估的自回归参数。
(2)()MA q 模型(Moving Average Model )——移动平均模型q 阶移动平均模型:式中,μ为时间序列的平均数,但当{}t y 序列在0上下变动时,显然μ=0,可删除此项;t e ,1t e -,2t e -,…,t q e -为模型在第t 期,第1t -期,…,第t q -期的误差;1θ,2θ,…,q θ为待估的移动平均参数。
(3)(,)ARMA p q 模型——自回归移动平均模型(Auto regression Moving Average Model )模型的形式为:显然,(,)ARMA p q 模型为自回归模型和移动平均模型的混合模型。
当q =0,时,退化为纯自回归模型()AR p ;当p =0时,退化为移动平均模型()MA q 。
2 改进的ARMA 模型(1)(,,)ARIMA p d q 模型这里的d 是对原时序进行逐期差分的阶数,差分的目的是为了让某些非平稳(具有一定趋势的)序列变换为平稳的,通常来说d 的取值一般为0,1,2。
对于具有趋势性非平稳时序,不能直接建立ARMA 模型,只能对经过平稳化处理,而后对新的平稳时序建立(,)ARMA p q 模型。
这里的平文化处理可以是差分处理,也可以是对数变换,也可以是两者相结合,先对数变换再进行差分处理。
(2)(,,)(,,)s ARIMA p d q P D Q 模型对于具有季节性的非平稳时序(如冰箱的销售量,羽绒服的销售量),也同样需要进行季节差分,从而得到平稳时序。
这里的D 即为进行季节差分的阶数;,P Q 分别是季节性自回归阶数和季节性移动平均阶数;S 为季节周期的长度,如时序为月度数据,则S =12,时序为季度数据,则S =4。
ARMAARIMA模型介绍及案例分析
ARMAARIMA模型介绍及案例分析AR、MA和ARIMA是时间序列分析中常见的模型,用于分析和预测时间序列数据的特征和趋势。
下面将对这三种模型进行介绍,并提供一个案例分析来展示它们的应用。
自回归模型(AR)是一种基于过去的观测值来预测未来观测值的模型。
它基于一个假设:未来的观测值可以由过去的观测值的线性组合来表示。
AR模型的一般形式可以表示为:y_t=c+ϕ_1*y_(t-1)+ϕ_2*y_(t-2)+...+ϕ_p*y_(t-p)+ε_t其中,y_t表示时间t的观测值,c是常数项,ϕ_1至ϕ_p是自回归系数,p是自回归阶数,ε_t是误差项。
AR模型的关键是确定自回归阶数p和自回归系数ϕ。
移动平均模型(MA)是一种基于过去的误差项来预测未来观测值的模型。
它基于一个假设:未来的观测值的误差项可以由过去的误差项的线性组合来表示。
MA模型的一般形式可以表示为:y_t=c+ε_t+θ_1*ε_(t-1)+θ_2*ε_(t-2)+...+θ_q*ε_(t-q)其中,y_t表示时间t的观测值,c是常数项,ε_t是误差项,θ_1至θ_q是移动平均系数,q是移动平均阶数。
MA模型的关键是确定移动平均阶数q和移动平均系数θ。
自回归移动平均模型(ARIMA)结合了AR和MA模型的特点,同时考虑了时间序列数据的趋势性。
ARIMA模型一般形式可以表示为:y_t=c+ϕ_1*y_(t-1)+ϕ_2*y_(t-2)+...+ϕ_p*y_(t-p)+ε_t+θ_1*ε_(t-1)+θ_2*ε_(t-2)+...+θ_q*ε_(t-q)其中,y_t表示时间t的观测值,c是常数项,ϕ_1至ϕ_p是自回归系数,p是自回归阶数,ε_t是误差项,θ_1至θ_q是移动平均系数,q是移动平均阶数。
ARIMA模型的关键是确定自回归阶数p、移动平均阶数q和相关系数ϕ和θ。
下面举一个电力消耗预测的案例来展示AR、MA和ARIMA模型的应用:假设有一段时间内的电力消耗数据,我们想要用AR、MA和ARIMA模型来预测未来一段时间内的电力消耗。
二阶自回归信号模型AR(2)
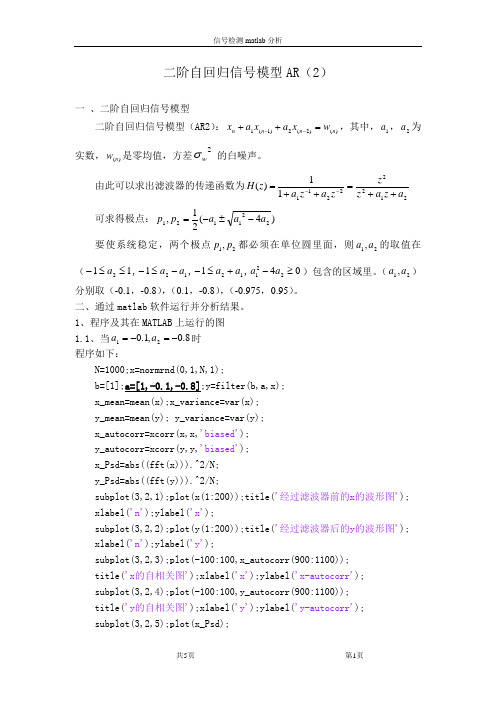
二阶自回归信号模型AR (2)一 、二阶自回归信号模型二阶自回归信号模型(AR2):)()2(2)1(1n n n n w x a x a x =++--,其中,1a ,2a 为实数,)(n w 是零均值,方差2wσ的白噪声。
由此可以求出滤波器的传递函数为2122221111)(a z a z z z a z a z H ++=++=-- 可求得极点:)4(21,221121a a a p p -±-=要使系统稳定,两个极点21,p p 都必须在单位圆里面,则21,a a 的取值在(112≤≤-a ,121a a -≤-,121a a +≤-,04221≥-a a )包含的区域里。
(21,a a )分别取(-0.1,-0.8),(0.1,-0.8),(-0.975,0.95)。
二、通过matlab 软件运行并分析结果。
1、程序及其在MATLAB 上运行的图 1.1、当8.0,1.021-=-=a a 时 程序如下:N=1000;x=normrnd(0,1,N,1);b=[1];a=[1,-0.1,-0.8];y=filter(b,a,x); x_mean=mean(x);x_variance=var(x); y_mean=mean(y); y_variance=var(y); x_autocorr=xcorr(x,x,'biased'); y_autocorr=xcorr(y,y,'biased'); x_Psd=abs((fft(x))).^2/N; y_Psd=abs((fft(y))).^2/N;subplot(3,2,1);plot(x(1:200));title('经过滤波器前的x 的波形图'); xlabel('n');ylabel('x');subplot(3,2,2);plot(y(1:200));title('经过滤波器后的y 的波形图'); xlabel('n');ylabel('y');subplot(3,2,3);plot(-100:100,x_autocorr(900:1100)); title('x 的自相关图');xlabel('x');ylabel('x-autocorr'); subplot(3,2,4);plot(-100:100,y_autocorr(900:1100)); title('y 的自相关图');xlabel('y');ylabel('y-autocorr'); subplot(3,2,5);plot(x_Psd);title('x 的功率谱密度图');xlabel('n');ylabel('x_Psd'); subplot(3,2,6);plot(y_Psd);title('y 的功率谱密度图');xlabel('n');ylabel('y_Psd'); 在matlab 上运行的图如下:图一1.2、当8.0,1.021-==a a 时程序与1.1相同,只是将黑体加下划线的a 改为a=[1,0.1,-0.8]。
自回归模型(ar)python求解系数
自回归模型(ar)python求解系数自回归模型(AR)是一种经典的时间序列预测模型,它基于时间序列的自相关性来进行预测。
在本文中,我们将介绍AR模型的基本原理,并使用Python编程语言来求解AR模型的系数。
一、AR模型的基本原理自回归模型是一种基于时间序列的预测模型,它假设未来的观测值与过去的观测值之间存在一定的关系。
AR模型的核心思想是利用过去观测值的线性组合来预测未来观测值。
具体而言,AR模型可以表示为:Y_t = c + φ_1 * Y_{t-1} + φ_2 * Y_{t-2} + ... + φ_p * Y_{t-p} + ε_t其中,Y_t表示时间点t的观测值,c表示常数项,φ_1, φ_2, ..., φ_p表示AR模型的系数,p表示AR模型的阶数,ε_t 表示误差项。
二、AR模型的求解AR模型的求解主要包括两个步骤:模型拟合和模型评估。
1. 模型拟合模型拟合的目标是通过最小化误差项来求解AR模型的系数。
常用的方法是最小二乘法(OLS),即通过最小化观测值与模型预测值之间的平方差来求解系数。
在Python中,我们可以使用statsmodels包中的AR函数来进行AR模型的拟合。
2. 模型评估模型评估的目标是判断AR模型的拟合效果是否良好。
常用的评估指标包括均方根误差(RMSE)、平均绝对误差(MAE)、残差的白噪声检验等。
在Python中,我们可以使用statsmodels包中的相应函数来进行模型评估。
三、使用Python求解AR模型系数的示例下面我们通过一个简单的示例来演示如何使用Python求解AR模型的系数。
```pythonimport numpy as npimport pandas as pdimport statsmodels.api as sm# 生成AR模型的数据np.random.seed(0)n = 1000e = np.random.randn(n)Y = np.zeros(n)Y[0] = 0Y[1] = 1for t in range(2, n):Y[t] = 0.6 * Y[t-1] + 0.3 * Y[t-2] + e[t]# 拟合AR模型model = sm.tsa.AR(Y)result = model.fit(maxlag=2, method='mle')# 输出模型的系数print(result.params)```在上述代码中,我们首先生成了一个AR模型的数据,然后使用statsmodels包中的AR函数拟合了AR模型,并通过调用fit方法求解了AR模型的系数。
autoregressive model介绍

自回归模型(Autoregressive Model,AR模型)是统计上一种处理时间序列的方法,它是用自身的过去各期的线性组合来描述当前时刻的状态。
AR模型是时间序列分析中的一种基础模型,广泛应用于经济学、金融学、人口学等领域。
AR模型的基本思想是,一个随机变量X的当前值X_t与其过去各期的值X_{t-1},X_{t-2},...,X_{t-k}以及一个误差项e_t之间存在着统计关系,即X_t=X_{t-1}+α_{t-1}X_{t-2}+...+β_{t-k}X_{t-k}+e_t。
这里的e_t是一个与X_t相关的误差项,其均值为0,方差为σ^2。
AR模型的优点在于,它可以很好地处理数据的波动性和趋势性。
对于具有趋势和季节性波动的数据,AR模型可以很好地捕捉到这些特征,并进行有效的预测。
同时,AR模型还具有模型结构简单、参数估计容易的优点。
AR模型的缺点在于,它假设误差项服从正态分布,这在某些情况下可能并不成立。
此外,AR模型对于数据的依赖性较强,如果过去的数据发生变化,可能会对模型的预测产生影响。
总的来说,自回归模型是一种强大而灵活的时间序列分析工具,能够帮助我们理解和预测数据的变化趋势。
自回归

自回归(AR )模型理论模型自回归(AutoRegressive, AR )模型又称为时间序列模型,数学表达式为+−++−=1:()(1)...()()na AR y t a y t a y t na e t其中,e(t)为均值为0,方差为某值的白噪声信号。
Matlab Toolbox研究表明,采用Yule ‐Walker 方法可得到优化的AR 模型[1],故采用aryule 程序估计模型参数。
[m,refl] = ar(y,n,approach,window)模型阶数的确定有几种方法来确定。
如Shin 提出基于SVD 的方法,而AIC 和FPE 方法是目前应用最广泛的方法。
若计算出的AIC 较小,例如小于‐20,则该误差可能对应于损失函数的10‐10级别,则这时阶次可以看成是系统合适的阶次。
am = aic(model1,model2,...)fp = fpe(Model1,Model2,Model3,...)AR预测yp = predict(m,y,k)m表示预测模型;y为实际输出;k预测区间;yp为预测输出。
t k y t k−−−−−y y y y t y t(1),(2),...,(1),(,...,(y t)2),(1),()当k<Inf时,yp(t)为模型m与y(1,2,…t‐k)的预测值;当k=Inf时,yp(t)为模型m的纯仿真值;默认情况下,k=1。
在计算AR模型预测时,k应取1,原因参照AR模型理论公式。
compare(y,m,k)[yh,fit,x0] = compare(y,m,k)Compare的预测原理与predict相同,但其对预测进行了比较。
||||1001||||y yh fit y μ⎛⎞−=×−⎜⎟−⎝⎠AR 误差e = pe(m,data)pe 误差计算。
采用yh=predict(m,data,1)进行预测,然后计算误差e=data ‐yh;[e,r]= resid(m,data,mode,lags); resid(r)resid 计算并检验误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自回归模型AR(p)的整体估计【摘要】:主要讨论时间序列的自回归模型AR(p)的参数估计问题,列出常用的普通最小二乘估计。
但实际的观测值是含有随机误差的,且与自身前一个或前几个时刻的观测值有关或有依赖性,都要考虑其所含的随机误差,所以引入整体最小二乘法的思想进行参数估计,得出相应的公式,最后并以算例加以验证与分析讨论。
关键词:自回归模型;参数估计;整体最小二乘估计;A Total Least Square Estimation of Autoregressive ProcessesAbstract:It discusses mainly the time series autoregressive model AR (p) of the parameter estimation problem, listing commonly used ordinary least squares estimation. But the actual observation contains random error, and with their own previous or the first few moments of the observations relating to, or dependent,so we must take into account the random error it contains.We introduce the total least squares parameter Estimates, and obtain the corresponding formula . In the last give the example to the verification and analysis.Key words: autoregressive process; estimation of parameter; total least square estimation;0 引言时间序列分析的目标就是通过分析要素(变量)随时间变化的历史过程, 揭示其变化发展规律, 并对未来状态进行分析预测[1]。
如在变形测量中,可以采用时间序列分析方法对观测数据进行分析,以便建立变形体的动态变形预测模型,并对其变形趋势进行预测。
所谓时间序列的参数估计,就是在模型结构及阶次已确定的条件下,对模型参数与进行估计,使所建立的模型是实际时间序列的“最佳”拟合模型[1]。
但在实际的观测中,观测值是由一定观测手段得到的,不可避免地含有随机误差,在这种情况下,普通的最小二乘估值难以保证结果的最优性。
本文将整体最小二乘法的思想引入时间序列模型中,不仅考虑自身观测值的误差,同时考虑与其有关的自身前一个或前几个时刻的观测值的误差,从而进行参数估计。
能够为预测得出更为准确的数据。
1 自回归模型[1] 1.1 模型子样观测值{ ,1,0,±=i x i },白噪声序列表示为{t a },回归系数用),,2,1(p j j =ϕ表示,则可得到的AR 模型:t p t p t t t a x x x x ++++=---ϕϕϕ 2211 (1)1.2模型参数的最小二乘估计设样本观测值{ ,1,0,±=t X t },记[]TNp p x x x Y 21++=[]T N p p a a a 21++=ε []T p ϕϕϕϕ 21=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=---+-p N N N p p p p x x x x x x x x x A212111则AR(p)模型可以表示为εϕ+=A Y (2) 由最小二乘原理可得到模型参数的估计为Y A A A T T 1)(ˆ-=ϕ那么根据最小二乘估计值可以得到噪声的估值为p p t t t t t x x x x aϕϕϕˆˆˆˆ2211-------= ),,1(N p t += 噪声方差2ˆa σ的最小二乘估值为 εεσˆˆ1ˆ1122T Np t tu p N a p N -=-=∑+=∧ 2 整体最小二乘法参数估计在进行许多时间序列分析的实际问题中,建立模型的主要目的就是在确定模型参数之后,对未来可能出现的结果进行分析预报。
而结果又与自身前一个或前几个时刻的观测值有关,观测必有误差的存在,所以不能忽略之前观测值A 的随机误差。
整体最小二乘法就是同时考虑自变量和因变量误差存在的算法。
方程(2)εϕ+=A Y 与线性回归方程具有相同的形式。
在线性回归中y=ax+b ,自变量x 是确定的,y 和b 是随机变量。
在AR(p)模型中 ,,21--t t x x 自然也是随机变量,但在t-1时刻,它们均已确定不变,所以AR(p)模型可以看做条件线性回归模型,故可用多元回归分析中的有关方法进行参数估计[1]。
A 作为自身前一个或前几个时刻的观测值是确定已知的,但在观测中是含有随机误差的,在计算中应该考虑其所含误差的影响。
应用整体解算的方法进行解算。
2.1整体最小二乘原理及解算步骤。
TLS 的基本思想可以归纳为[2]:观测方程1,,1,m m n n X Y β=中,不仅观测向量Y 中存在误差V y ,同时系数矩阵X 中也含有误差V X 。
此时,可用TLS 方法求得参数∧β。
也就是说,在TLS 中,考虑的是矩阵方程()X V X +∧β=Y V Y + (2-1) 或⎪⎭⎫ ⎝⎛+=+==X ^X ^^^^V Y V X X ,X Y Y ,β (2-2) 的求解。
在测量数据处理中,n 为观测个数,m 为参数个数,通常情况下n >m ,矩阵X 的秩n m X R m n <=⎪⎭⎫ ⎝⎛,。
显然式(2-1)的矩阵表示为 ()01][][^=⎥⎥⎦⎤⎢⎢⎣⎡-+βV V Y XY X(2-3) 或等价为()0=+z D B (2-4)其中:][1,,1,n mn m n Y XB =+为增广矩阵,][V V Y XD =为误差矩阵,=+1,1m Z ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-1^1,m β,求解上式的整体最小二乘方法可以表示为约束最优化问题:m in =DF(2-5)DF是D 的)(Frobenius F 范数。
求的DF=min 的问题称为TLS 问题,若能找到式(2-1)的一个最小点][V V YOXO,则任何满足()+=+Y X V XO ^βV YO的^β都称为TLS 解[3]求解TLS 问题的主要工具是奇异值分解[4],得[]⎥⎦⎤⎢⎣⎡-==⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=+1ˆ,,1βλZ k Y Y XY Y X X X Y XY X B B m TTT T T T T 令⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡YY XYXY XXTTT T N N N N Y Y X Y Y X XX ,得[]XY m XX N I N 11ˆ-+-=λβ 综上所述,求解矩阵方程1,,1,m mn n X Yβ=中参数β的TLS 解TLS β的步骤为: (1)列观测方程式1,,1,m mn n X Y β=; (2)构成增广矩阵⎥⎦⎤⎢⎣⎡=+1,,1,n m n m n Y X B ; (3)求矩阵B B T 的特征值,并求出最小特征值1+m λ;(4)计算参数β的TLS 解1,1,1,^1,m XY m m m m m XX m N I N -+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=λβ。
2.2自回归模型AR(p)的整体估计 线性模型:εϕ+=A Y用矩阵形式表示:βˆX Y = 式中:ϕβ==ˆ,A X 可得:[]XYm XX N I N 11ˆ-+-==λβϕ, 3 实例分析以文献[3]例5.6的数据为样本观测数据,共计36个数据沉降观测数据(1) 模型参数的最小二乘估计 由文献[3]得模型阶数为3=p误差方程 36,,5,4,ˆˆˆ332211 =-++=---i x x b x b x b v i i i i i 参数估计为 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-635059.0327809.0041087.0)(ˆˆˆˆ1321Y X X X b b b T T β 得自回归模型 321635059.0327809.0041087.0---++=i i i i x x x x)(80.0ˆ,6476.0304286.192ˆ2mm p n V V T ===-=σσ(2) 整体估计参数估计为 []⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-+XY m XX N I N b b b 11321ˆˆˆˆλβ 得自回归模型4 结论不足之处在于矩阵A 中是不同时刻的观测值,需要在每个时刻都要进行平差求解才行,这里只是一个整体的结算过程,还需要进行每一的迭代计算。
参考文献[1]吴怀宇. 武汉:武汉大学出版社[M].2004.[2]Van Huffel S,Vandewalle J.The Total least Squares Proble,Computational Aspects andAnalysis,Math,SIAM[J].Philadelphia,1991.[3]邱卫宁,陶本藻,姚宜斌,吴云,黄海兰.测量数据处理理论与方法[M].武汉:武汉大学出版社,2008[4]俞锦成.关于整体最小二乘的可解性[J].南京师范大学学报(自然科学版),1996,19(1):13-16.。