船舶操纵
船舶操纵第四章 外力对操船的影响
2.前进中,风从正横后来
风从正横后来 N 在 G 之后 W 在 G 之前 首逆风偏转
F a 和 F w 的综合作用
WUT NC
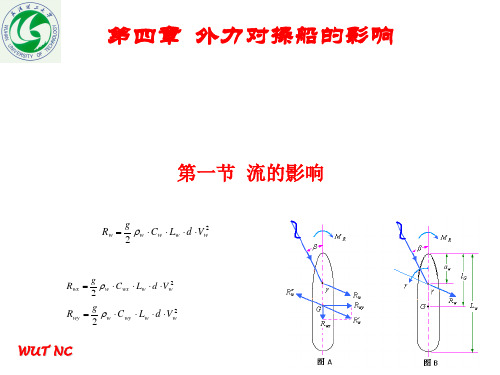
第二节 风的影响
(三) 船舶倒退中受风偏转
1.后退中,风从正横前来
风从正横前来 N 在 G 之前 W 在 G 之后 尾迎风偏转
F a 和 F w的综合作用
MW
最终首迎风向下风漂移
(2)风从正横后来
风自正横后来 船向下风漂移 , N 在 G 之后 , W 在 G 之前 , 尾顺风偏 ; .
F a 和 F w 综合作用使船首迎风偏 因为 : 首纵倾
首部受风面积大 重心前移 . M
a
风动力转船力矩
水动力转船力矩
WUT NC
船舶横移时 船舶后退时 , W 在 G 之前 , W 在 G 附近 , W 在 G 之后
第二节 风的影响
四.船舶受风时的偏转
(一) 船舶静止中受风时的偏转 1.平吃水船舶,风自正横前来
风自正横前来 船向下风漂移 , N 在 G 之前 , W 在 G 之后
F a 和 F w 综合作用使船首顺风偏 最终正横风向下风漂移
M
R
g 2
w C Nw L w d V w
2
二、流对操船的影响 1.对航速和冲程的影响
顺流航行:航速=船速+流速; 逆流航行:航速=船速-流速;
2.对船舶漂移的影响 3.对舵力、舵效的影响
(1)因为:舵力,舵力转船力矩是两个对水概念, 所以:当舵角一定时,顶流时的舵力、舵力转船力矩=顺流时的舵力、舵 力转船力矩、 (2)舵效是对地概念:顺流时对地速度—顶流时对地速度= 2 R ; 所以顶流时在较短距离上使船首转过较大的角度,因此,顶流时舵 效较好。
船员大型船舶操纵特殊培训课件

THANKS
感谢观看
船员大型船舶操纵理论知识
03
培训
航海学基础知识
航海学概述
航海学是研究海洋航行、船舶导航和 海洋学的综合性学科,旨在培养船员
掌握船舶航行的基础知识和技能。
无线电导航
无线电导航是利用无线电信号,如 GPS、GLONASS、Galileo等全球定 位系统,进行高精度定位和导航的方
法。
天文航海
天文航海是根据天体位置和运动规律, 通过观测太阳、月亮、行星等天体位 置,推算船位和航向的方法。
船员大型船舶操纵特殊培训
05
评估与改进
培训效果评估
评估标准制定
根据培训目标和内容,制 定合理的评估标准,确保 评估结果客观、公正。
培训过程监控
对培训过程进行实时监控, 及时发现和解决存在的问 题,确保培训质量。
培训效果评估方法
采用多种评估方法,如考 试、实操考核、学员反馈 等,全面评估培训效果。
船员大型船舶操纵特 殊培训课件
目录
• 大型船舶操纵概述 • 船员大型船舶操纵技能培训 • 船员大型船舶操纵理论知识培训 • 船员大型船舶操纵实践操作培训 • 船员大型船舶操纵特殊培训评估与
改进
01
大型船舶操纵概述
大型船舶的定义与特点
01 大型船舶定义
通常是指船长超过100米,载重吨位超过1万吨的 船舶。
气象预报与警报
海洋气象观测与仪器
船员需要掌握气象预报和警报的获取方法 ,了解不同气象条件下的航行建议和限制 ,以保障航行安全。
了解海洋气象观测的基本方法和常用仪器 ,如风速风向仪、海浪仪等,有助于船员 更好地观测和记录气象数据。
船舶自引和靠离泊操纵体会

一艘散货船在船长的熟练作下,自 行引领穿越狭窄航道,安全抵达目的 地,展现了船长的专业技能和船舶的 优良性能。
靠离泊操纵的成功案例
案例一
某集装箱船在港口码头成功靠泊,整个过程流畅,安全可靠,未对其他船舶或 设施造成影响。
案例二
一艘客轮在复杂的潮汐和风向条件下,顺利完成离泊操纵,安全驶离港口,展 示了船长对环境的敏锐观察和应对能力。
在靠离泊操纵时,要特别注意风流的影响 ,采取合适的方法减小或避免其影响。
及时与其他船舶沟通,了解其动态和意图 ,避免误解和冲突。
船舶自引和靠离泊操纵的注意事项和安全措施
严格遵守规定
在自引和靠离泊操纵时,要严格遵守相 关规定和操作规程,确保安全可靠。
加强培训和实践经验
加强相关人员的培训和实践经验积累 ,提高操作技能和处理问题的能力。
船舶自引和靠离泊操纵技术的创新和应用
新技术的应用
随着科技的不断进步,新的船舶 自引和靠离泊操纵技术将不断涌 现,如无人船、智能航行系统等
。
模拟训练的应用
模拟训练将成为船舶自引和靠离泊 操纵技术的重要应用领域,通过模 拟训练提高操纵者的技能和应对能 力。
安全保障的应用
船舶自引和靠离泊操纵技术将更加 注重安全保障,通过技术手段提高 操纵的安全性和可靠性。
船舶自引的重要性在于提高船舶的自 主性和独立性,减少对外界协助的依 赖,降低港口和船舶的运行成本,提 高港口和航道的利用率。
靠离泊操纵的基本原则和流程
基本原则
安全、高效、经济、环保。
靠泊操纵流程
船舶接近泊位、调整航向和速度、控制靠泊角度 和距离、保持稳定并完成靠泊。
离泊操纵流程
解除固定措施、调整船舶位置和角度、控制离泊 速度和方向、保持稳定并完成离泊。
船舶操纵系统图解

第一节 操纵系统概述
为了满足船舶在各种工况下的航行需要,将船舶主机的起动、换向和调速等各装置联结成一个 统一整体,并可集中控制的所有机构、设备和管路,总称为柴油机推进装置的操纵系统。
小型柴油机的推进装置,其起动、调速及换向系统的控制件距离近,通常分别设置,各自操纵。 近年来不少船舶也通过机械、气动等型式传输集中至机舱集控台或驾驶室,对推进装置集中操纵。 大、中型柴油机为操纵方便和工作可靠,都将各控制部分通过各种方式有机地联系以便集中控制和 远程控制。
一、对操纵系统的要求
在船舶柴油机中,操纵部分是最复杂的一部分,其部件多、零件杂、相互牵连制约,近代自动 化技术和遥控技术在操纵系统的应用,更增加了操纵系统的复杂程度。为了保证操纵系统能够可靠 地工作,对船舶柴油机的操纵系统有下列基本要求:
(1)必须能迅速而准确地执行起动、换向、变速和超速保护等动作,并能满足船舶规范上相 应的要求。
三、操纵系统和遥控系统的类型
1. 操纵系统的类型 按操纵部位和操纵方式,操纵系统可以分为: 1)机旁手动操纵:操纵台设置在柴油机旁边,使用相应的控制机构操纵柴油机,由轮机员直 接手动操纵,使之满足各种工况下的需要。 2)机舱集中控制室控制:操纵台设置在机舱适当部位的专用控制室内,由轮机员对柴油机实 现操纵和监视。 3)驾驶室控制:在船舶驾驶室内,专设主机遥控操纵台,由驾驶员直接操纵柴油机。 机旁手动操纵是操纵系统的基础,机舱集中控制和驾驶台控制均称为遥控,三者之间常设有转 换装置以便随意转换。每种操纵台上均设操纵手柄,操纵部位转换开关、应急操作按钮及各种显示 仪表,以便对主机进行操纵和运行状态的监视。尽管目前主机遥控技术已经达到了相当高的水平, 但系统中仍然必须保留机旁手动操纵系统,以保证对主机的可靠控制。 2.遥控系统的类型 遥控系统是用逻辑回路和自动化装置代替原有的各种手动操作程序。按遥控系统所使用的能源 和工质,主机遥控系统可分为: 1)电动式遥控系统:以电作为能源,通过电动遥控装置和电力驱动装置对主机进行远距离操 纵。 该系统控制性好,控制准确,遥控距离不受限制,有利于远距离控制;设备简单,不需要油、 气管路,无油、气处理装置,不必担心漏油、漏气;易实现较高程度的自动化,是实现主机遥控的 最佳途径。缺点是管理水平要求高,故障不易发现,操作管理人员要具备一定的电子技术知识。 2)气动式遥控系统:以压缩空气为能源,通过气动遥控装置和气动驱动装置对主机进行远距 离操纵。 气源可直接由起动空气经减压、净化得到,信号传递距离较远,一般在 100 米以内可满足系统 的控制要求,信号受电气、振动、温度等干扰少,动作可靠,故障容易发现,维修方便。但该系统 气源净化品质要求高,需除水、除油、除尘,否则易使气动元件失灵。 3)液力式遥控系统:以油泵产生的压力油作为能源,通过液压阀件和液动机构进行控制。
简述船舶吃水对船舶操纵的影响。
简述船舶吃水对船舶操纵的影响。
船舶的吃水是指船舶在水中的下沉深度,也就是船体下部在水中的浸没部分。
船舶的吃水对船舶操纵有着重要的影响,下面我将从多个角度来详细解释。
1. 稳定性影响:船舶的吃水会直接影响其稳定性。
通常情况下,船舶的稳定性随着吃水的增加而增强。
较大的吃水可以提供更大的浮力,使得船舶更难倾覆或失去平衡。
然而,过大的吃水也可能降低船舶的稳定性,因为过高的重心可能导致倾覆风险。
2. 操纵性影响:船舶的吃水对操纵性有着直接的影响。
较大的吃水可以提供更好的船舶操纵性能,因为它可以增加船舶的侧向稳定性和舵效。
此外,较大的吃水还可以降低船舶在海浪中的受力和纵向运动,从而提高操纵的可靠性和舒适性。
3. 速度影响:船舶的吃水也会对船舶的速度产生影响。
一般来说,较小的吃水可以减少水的阻力,从而提高船舶的速度。
然而,在一定范围内,增加吃水也可以提高速度,因为它可以减少波浪对船舶的阻力。
但是,如果吃水过大,会增加摩擦阻力和波浪阻力,从而降低船舶的速度。
4. 水深限制:船舶的吃水还受到水域深度的限制。
如果船舶的吃水超过了水域的最大深度,船舶将无法通过该水域。
因此,船舶的吃水必须小于或等于水域的最大深度,以确保船舶的安全航行。
综上所述,船舶的吃水对船舶操纵有着重要的影响。
它涉及到船舶的稳定性、操纵性、速度和水深限制等方面。
船舶设计和操作中需要合理考虑和控制船舶的吃水,以确保船舶的安全、稳定和高效运行。
第1章船舶操纵基础
第一节 船舶变速运动性能
(3)影响紧急停船距离的主要因素 ---主机倒车功率、换向时间 船舶吨位、载荷状态等相近的情况下,主机倒车功率 越大,紧急停船距离越小。大型船舶倒车功率虽比小型 船舶大,但每吨排水量所占主机功率小,而且大型船舶 (1 8万DWT以上)大多配备的是汽轮机,由于其换向 时间长,倒车功率占常用功率比例低,所以大型船舶紧 急停船距离明显增大。
第一节 船舶变速运动性能 第二节 船舶的旋回性能 第三节 稳定性和保向性
第一节 船舶变速运动性能
船舶通过改变主机转速从而改变螺旋桨的转速和方 向(CPP螺旋桨通过改变螺距角),进行启动、变速、 停车、倒车操纵时,船舶都具有维持其原来运动状态的 特性(船舶惯性)。 由于船舶惯性的作用,船舶从一种运动状态转变到 另一种稳定运动状态的过程中需要经过一段时间的延续, 在这段时间内船舶要航行一定的时间与距离。船舶运动 惯性通常有两个指标来衡量:一是船舶完成变速过程中 所航进的距离,称为冲程;另一是完成这段过程所需的 时间,称为冲时。
第二节 船舶的旋回性能
前言:船舶旋回性是船舶最基本的重要操纵性能之 一,通常采用满舵时旋回初径DT与船长L之比 DT/L,即相对旋回初径来衡量. 一、船舶旋回运动的过程及其特征 (一)转舵阶段 从开始转舵到舵转至指定舵角止为转舵阶段。在这 个阶段,由于时间较短,船舶因运动惯性仍保持直线前 进,随后船首出现向转舵一侧回转的趋势,船体开始出 现向操舵相反一侧横移(反向横移),并会产生向转舵 一侧少量横倾(内倾),船速也略有下降。
第一节 船舶变速运动性能
(4)停车冲程实船经验数据
以常速航进中的一般船舶,主机停车后船速达到 2kn时,其停车冲程约为船长的8~20倍,而VLCC满 载时,从海上常速中停车达到余速3kn时,停车冲程约 为船长的23倍. 这里说明一个问题,船舶的排水量越大,其冲程 越大。船舶的航速越大,其冲程也越大。
船舶操纵考点总结
船舶操纵考点总结船舶操纵考点总结第一章船舶操纵性能1.船舶由静止状态进车,达到相应稳定航速的前进距离与船舶排水量成正比,与相应的稳定的船速的平方成正比,与螺旋桨推力成反比。
2.船舶由静止状态进车,达到相应稳定航速的时间与船舶排水量成正比,与相应的稳定的船速的成正比,与螺旋桨推力成反比。
3.船舶由静止状态启动主机,到达到常速,满载船的航进距离约为船长的20倍,轻载约为满载的1/2---2/3。
4.船停船距离(冲程)/冲时:船在前进中下令停止主机至船对水停住的滑行距离和时间。
5.实测停车距离(冲程)/冲时:船在前进中下令停止主机至船对水余速将至2节时或对水速度降低到保持舵效的最低速度的滑行距离和时间。
6.停车冲程与船速的平方成正比,与排水量成正比。
7.航行船舶停车后速度变化:呈非线性变化,开始时速度下降快,而后下降慢,至终为0 8.影响冲程大小的因素与:排水量、初速度、船舶阻力、污底和浅水有关。
9.减速常数是指船舶停车后船速每递减一半所需的时间,减速常数随排水量的不同而不同,一般万吨船约为4Min.10.倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住移动时的滑行距离和时间。
11.倒车停止性能:从发令开始至船对水停止移动的这段时间所前进的距离。
12.实测倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住时的滑行距离和时间。
13.倒车停船距离:万吨级6-8L,5万吨8-10L,10万吨10-13L,15-20万吨级13-16L14.航行中船舶下令倒车后,速度的变化是主机倒车转速达到最大时下降快。
15.船舶航行中进行倒车,通常在关闭油门后,等船速降至全速的60%-70%,转速降至额定转速的25%-35%,停止主机在进行倒车启动。
16.全速倒车后,右旋螺旋桨船,向右偏转,航向变化可能超过90度,压载状态较满载状态右偏量更大。
左满舵比右满舵旋回圈小。
17.主机换向所需时间:蒸汽机指示功率60-90s,内燃机制动功率90-120s,汽轮机轴功率120-180s。
船舶操纵的基本原理(共10张PPT)
12、0)影对响右旋旋回单圈桨大船小,的慢因速素航行时,由SWT的作用,向左回转的旋回圈在直径较小,但对V型船尾高速航行掉头时,由于伴流效应横向力
航海吃水和以最大营运船速航行时,将舵从一舷的350转至另一 、船尾体流 横螺倾旋时性,效由应于横左向右力浸均水使体船积首不右等偏,,低且速大时多,能受克阻服力水推面力效转应船横力向矩力作的用作,用操,舵因向此低向舷右侧回转时的, 旋其回旋圈回直圈径直较径小小;于向左回旋的旋回圈 舷的350,或且从任何一舷的350转至另一舷的300的时间应不 直舵径面。 积系数μ越大,旋回圈直径就越小。 及3通量)对常θ≈反应 所9移0的说0量~超时的(1间横2偏过0极距0距为是之)2重指后L要当,8K ,航进s驾向入;驶转员过一应90熟°般时练的掌情横握距况,。以下便准,确操由纵船正舶。舵至一舷350为止的时间约15s左 右。内河船舶装备机动舵机,当L﹥30m时其主操舵装 (反3移)量逆是风指回转转舵时后的,旋船回舶圈重直心径从小原于航顺向风向回操转舵时相的反旋一回侧圈横直移径的;距离。
船舶制动能力是指船舶在某一船速下,主机停车或倒车以后, 船舶对主机工况的反应能力。它可用主机停车或倒车后船舶 对岸相对静止所需的时间和船舶滑行距离的长短来衡量。
第二节 旋回圈要素与船舶操纵性的关系
船舶在定速直航状态下,操某一舵角(一般为满舵),船舶 将作纵向和横向相结合的复合运动,称为旋回运动。船舶 作旋回运动时重心运动的轨迹,称为旋回圈。旋回圈几何 特征是:
船舶操纵的基本原理
船舶改变航行方向的快慢能力。或者船舶受外力作用偏离 了原航向,用舵操纵船舶使它恢复原航向航行的快、慢能 力(或船舶追随航向或舵角的快、慢能力)。追随性的优劣 可用追随性指数T值来衡量。T值越小,操舵时船舶对舵 角响应所需的时间越少,追随性能越好;T值越大,操舵 时船舶对舵角响应所需的时间越多,追随性能越差。
船舶操纵与避碰知识点
船舶操纵与避碰知识点在海上,船舶操纵和避碰是船员必须掌握的重要知识点。
正确的船舶操纵和避碰可以保障船舶的安全航行,防止事故的发生。
本文将介绍一些船舶操纵和避碰的知识点,帮助您更好地了解这一领域。
一、仪表读数在操纵船舶时,仪表读数是非常重要的。
船舶的仪表读数涉及到许多重要参数,例如船速、水深、舵角、机舱温度等。
正确读取仪表读数可以帮助船员更好地了解船舶的状况,做出正确的决策。
比如,当船速异常高时,可能需要减速,避免发生危险。
二、舵角控制在船舶操纵中,正确的舵角控制也十分重要。
船舶的舵角决定了船舶的转向和航向。
舵角的控制需要充分考虑到海况、风向等因素。
通常情况下,舵角的控制应该是平缓、稳定的。
过于快速和急促的舵角控制可能会导致船舶失控和事故的发生。
三、瞭望瞭望是船舶操纵中非常重要的一环。
瞭望员需要时刻注意周围的环境,及时发现可能的障碍物和风险。
例如,当发现有其他船只正在逼近时,需要及时调整船舶的航向和速度。
在恶劣的天气情况下,尤其需要进行充分的瞭望工作,以确保船舶的安全。
四、避碰规则在海上航行中,避碰是非常关键的。
避碰规则是在国际船舶安全公约和国际海上法律框架下制定的。
避碰规则规定了船舶之间应该如何避免碰撞,以及如何分配避碰责任。
在遇到其他船只时,通常应该遵循“大船避小船,右舷避左舷”的原则。
但是,实际情况往往复杂,需要综合考虑各种因素做出正确的判断。
五、使用雷达雷达是一种非常重要的船舶操纵工具。
雷达可以在所有天气条件下探测到其他船只、冰山、浮标等物体的位置和距离。
通过使用雷达,船员可以更好地掌握周围环境的情况,及时调整船舶的航向和速度,以确保船舶安全。
六、手动操纵和自动操纵在现代船舶中,手动操纵和自动操纵都有其优缺点。
手动操纵需要船员具备较高的技能和经验,但是可以更灵活地控制船舶。
自动操纵则可通过计算机控制船舶的航向、船速等参数,但是可能会存在故障和不可靠性。
在实际操纵中,船员需要根据具体情况灵活地使用手动和自动操纵。
船舶操纵拖轮
目录
CONTENTS
• 船舶操纵拖轮概述 • 船舶操纵拖轮的种类与用途 • 船舶操纵拖轮的设备与设施 • 船舶操纵拖轮的操作技术 • 船舶操纵拖轮的案例分析 • 船舶操纵拖轮的发展趋势与未来展望
01 船舶操纵拖轮概述
定义与特点
定义
船舶操纵拖轮是一种专门用于协助其 他船舶进行靠泊、离泊、移泊等操纵 作业的船舶。
06 船舶操纵拖轮的发展趋势 与未来展望
船舶操纵拖轮的技术创新
1 2 3
船舶操纵拖轮的自动化和智能化
随着科技的发展,船舶操纵拖轮将逐渐实现自动 化和智能化,提高作业效率和安全性。
新型推进系统
研发更高效、环保的推进系统,如电力推进系统、 燃料电池推进系统等,以提高船舶操纵拖轮的性 能和能效。
先进导航和通信系统
拖轮的操作还需要注意环境保 护,避免因操作不当造成海洋 污染或噪音扰民等问题。
05 船舶操纵拖轮的案例分析
案例一:大型船舶操纵拖轮的应用
总结词
大型船舶操纵拖轮在港口和航道中的重要作用
详细描述
大型船舶操纵拖轮主要用于协助大型船舶进出港口、靠离码头、掉头等操作。 它们具有强大的拖力和推力,能够提供稳定的动力输出,确保大型船舶在复杂 的水域中安全、高效地操作。
拖轮的操纵方法
拖轮的操纵主要依靠船长和船员的配合,通过舵、锚、缆等设备来控制拖轮的方向、 速度和位置。
拖轮的操纵方法包括推进器的控制、转向和制动等,需要熟练掌握各种设备的操作 技巧和配合方式。
拖轮的操纵还需要注意水流、风向和潮汐等因素的影响,以确保安全和高效的航行。
拖轮的航行规则与安全措施
拖轮在航行中需要遵守国际海上避碰 规则和当地的海上交通规则,确保航 行安全。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
检索实验报告 班级 航海127 学号 201210111238 姓名 庄彦鹏 日期 3013.06.24 题目:研究数学在计算机编程语言中的应用 课题分析:以数学为基础,利用数学语言来编写计算机程序设计语言。在当今社会,电
脑已经普吉到千家万户中,各类网站,QQ,MSN等聊天软件,各种游戏,应用软件都离不开程序设计。而这些软件的开发中引用了数学的各方面内容,例如游戏软件中引用了线性代数中大量的坐标运算,CAD绘图则广泛使用微积分作为理论研究。编写越来越多的计算机程序来适应人们的日常生活是当下社会的要求。电脑的发展离不开各种程序的支持,只有开发更多的应用程序才能顺应当代社会发展的要求。编程语言是以数学为基础,程序设计中涉及很多科学计算,这要求通过学习数学来锻炼。程序设计需要逻辑思维和严谨的态度,而数学可以提高我们的思维判断能力,有助于提高编程者的能力。实际问题转化为程序,需要建立一个完善的数学模型。程序编程的思想最重要的是算法,算法建立在数学的基础之上,算法来自于数学。由此可以看出课题的涉及的关键词是数学,程序设计,编程语言等等。因此,应该对这些关键词进行全面的检索,为了检索到较新的信息,检索时限定检索时限为2001年至今。
选择数据库:
《清华同方全文数据库》 《维普全文数据库》《EI village 2》 《Web Of Knowledge》 检索途径:高级检索:关键词:数学*C语言编程
检索条件: 主题=高等数学 and 主题 % 程序设计 (模糊匹配)
“((Keyword_C=(高等数学)+Title_C=(高等数学)))*((Keyword_C=(程序设计)+Title_C=(程序设计)))” (((the higher mathematics) WN All fields) AND ((program design) WN All fields))
检索内容:
同方中国知网 SrcDatabase-来源库: CJFD1999 Title-题名: 数学模型·最小二乘·程序设计——谈计算机在高等数学中应用之三 Author-作者: 徐志学; Source-文献来源: 赤峰教育学院学报 Keyword-关键词: 数学模型:6944,最小二乘法:3491,数学问题:3361,计算机:2673,函数模型:2497,实际问题:2437,数学建模:1644,几何模型:1537,数学结构:1405,科学实验:1384 Summary-摘要: "数学模型"在数学界是时尚术语。所谓数学模型,就是在生产和科学实验的过程中,产生很多用数学解决的问题,对这些问题进行分析、归纳、转化、抽象等,使之变为数学问题,并通过对数学问题的研究,从而解决这些实际问题。上面所说的数学问题就是实际问题的数学模型。文(一)曾对数学模型做过论述,即"数学模型,指的是对现实原型为了某种目的而作的抽象、简化的数学结构,它是使用数学符号、数学式子及数量关系对原型作一种简化而本质的刻划,„„"由于实际问题是千差万别的,这样数学模型的种类也是多种多样的。如函数模型、方程模型、不等式模型、数列模型、几何模型等等。将实际问题转化为数学问题的过程叫数学建模,简称为建模。... PubTime-发表时间: 1999-03-15 Year-年: 1999 Period-期: 01 PageCount-页码: 42-44
SrcDatabase-来源库: CMFD2006 Title-题名: 高职《C++语言程序设计》实验课教学设计与实践 Author-作者: 王丽霞 Source-文献来源: 山东师范大学 Keyword-关键词: 教学设计;以学为主;自主学习;协作学习 Summary-摘要: 本文是一篇结合教学实际研究高职计算机专业的《C++语言程序设计》实验课的教学设计的论文。撰写此论文目的是改善传统的程序设计语言实验课的上课方式,形成适合高职生特点和培养目标的实验课授课模式,培养学生的探索创新精神和快速学习及实践的能力,完成高职教育的培养生产第一线的技术应用型人才的培养目标。 高等职业教育在近几年来随着社会经济的发展取得了长足的进步,其培养目标有别于普通高校教育,传统的教学过程已经不适合高职生的教育,特别是对于计算机专业的《C++语言程序设计》这一实践性很强的课程而言更是如此。作为一名高职生教师,应该改变计算机程序设计实验课上让学生放任自流上机实验或完全在... PubTime-发表时间: 2006-04-10 Year-年: 2006 Period-期: 10 PageCount-页码: 49
SrcDatabase-来源库: CJFD2005 Title-题名: 高师数学专业程序设计语言课程设置与教学 Author-作者: 陈建孝;余晓春 Organ-单位: 韩山师范学院数学与信息技术学院;韩山师范学院数学与信息技术学院 广东潮州521041 ;广东潮州521041 Source-文献来源: 吉林大学学报(信息科学版) Keyword-关键词: 高师;;新课标;;程序设计语言;;教学改革 Summary-摘要: 针对“普通高中数学课程标准”对高中数学教师的新要求,分析中学数学师资存在的的问题;参照教育部“关于进一步加强高等学校计算机基础教学的意见”(征求意见稿),提出高师数学教育专业程序设计语言课程设置与教学改革的几点建议。 PubTime-发表时间: 2005-12-30 Fund-基金: 韩山师范学院2003-2006年度教学改革与研究课题 Year-年: 2005 Period-期: S2 PageCount-页码: 11-13
维普中文科技期刊系统:
〖检索时间〗2013-06-24 21:08:52 〖检索结果〗选中2篇
1/2 【题 名】应用计算机计算不可积类型的积分算法分析 【作 者】刘洪海 【刊 名】商品与质量:学术观察.2013(1) 【机 构】武汉商业服务学院,湖北武汉430056 【ISSN号】1006-656X 【CNNO号】11-3669/T 【馆藏号】71038X 【关键词】高等数学 积分 C语言程序设计 【文 摘】在高等数学的积分中,有些积分按初等函数理论划分是没有原函数的。可在实际工程中需要应用这些积分计算,工程数学有很多方法解决近似的问题,只要能保证一定的精度就可以应用。本文通过例子,使用计算机的程序辅助计算,给出计算机计算的算法。期望在工程计算的应用中能够更好服务于工程技术人员,也使得工程数学在一定程度上更好的应用计算机技术有更广阔的发展。 【网 址】http://www.cqvip.com/QK/71038X/201301/44227015.html 2/2 【题 名】计算机在高等数学极限理论分析中的应用初探 【作 者】程正琼 【刊 名】四川农业大学学报.1996(4) 【机 构】不详 【ISSN号】1000-2650 【CNNO号】51-1281/S 【馆藏号】91109X 【关键词】高等数学 极限 计算机应用 BASIC语言 【文 摘】本文应用计算机技术对高等灵堂中极限理论分析进行了探讨,以TURBO BASIC语言编制源程序,分别用(ε-N)和(δ-N)表达法,以数字状态显示,直观地揭示出序列极限,函数极限的原理,从而有助于正确理解序列极限,函数极限的定义。 【网 址】http://www.cqvip.com/QK/91109X/199604/2298110.html EI village 2
Accession number:20112414051030 Title:Integrating to learn and learning to integrate: A case study of an online master's program on science-mathematics integration for middle school teachers Authors:Lee, Mimi Miyoung (1); Chauvot, Jennifer (1); Plankis, Brian (1); Vowell, Julie (1); Culpepper, Shea (1) Author affiliation:(1) University of Houston, Department of Curriculum and Instruction, College of Education, Houston, TX 77204, United States Corresponding author:Lee, M. M.(mlee7@uh.edu) Source title:Internet and Higher Education Abbreviated source title:Internet Higher Educ Volume:14 Issue:3 Issue date:July 2011 Publication year:2011 Pages:191-200 Language:English ISSN:10967516 Document type:Journal article (JA) Publisher:Elsevier Ltd, Langford Lane, Kidlington, Oxford, OX5 1GB, United Kingdom Abstract:iSMART (Integration of Science, Mathematics, and Reflective Teaching) Program is an online science and mathematics integrated graduate program for middle school teachers across the state of Texas. As part of a large design-based research project, this paper describes the initial stages of the design process of the iSMART program for