第7章作业参考答案
地理人教版7年级下册第7章第1节 日本试卷及参考答案

地理人教版7年级下册第7章第1节日本分层作业(基础版)一、选择题1.日本人最喜爱的花是()A.牡丹B.菊花C.梅花D.樱花2.关于日本自然地理特征的叙述,正确的是()A.位于北海道的关东平原是其最大的平原B.处于两大板块交界处,多火山、地震C.气候四季分明,很少受到台风侵袭D.富士山海拔3776米,山顶白雪皑皑,终年不融化3.就海陆位置而言,日本位于太平洋的()A.西北部B.东北部C.东南部D.西南部4.既是世界上最深的湖泊,也是世界上淡水储量最大的湖泊是()。
A.维多利亚湖B.苏必利尔湖C.贝加尔湖D.青海湖5.湄公河上游位于中国境内的名称是()A.红水河B.怒江C.澜沧江D.金沙江6.俄罗斯在世界上处于领先地位的产业有()A.核工业B.农业C.消费品制造业D.纺织工业和食品工业7.环太平洋火山地震带上多地震的亚洲国家有()A.日本B.俄罗斯C.美国D.加拿大8.日本处于哪个板块的交界地带()A.太平洋板块与亚欧板块B.亚欧板块与印度洋板块C.美洲板块与太平洋板块D.印度洋板块与太平洋板块9.下列河流中流入太平洋的是()A.叶尼塞河B.恒河C.湄公河D.印度河10.俄罗斯的面积是世界()位.A.第三位B.第一位C.第二位D.第四位11.俄罗斯太平洋沿岸的港口城市是()A.符拉迪沃斯托克B.摩尔曼斯克C.圣彼得堡D.莫斯科12.日本发展工业的不利条件是A.地域狭小,资源贫乏B.丰富的人力资源,较高的科学文化水平C.岛国,多优良港湾,海上运输方便D.海岸线曲折,多优良港湾13.图中A海峡是21世纪海上丝绸之路的重要通道,该海峡是()A.马六甲海峡,沟通了太平洋和大西洋B.直布罗陀海峡,沟通了红海和地中海C.中国从波斯湾进口石油必经之地D.霍尔木兹海峡沟通了太平洋和印度洋14.日本的主要民族是()A.汉族B.大和民族C.朝鲜族D.布依族读图文材料回答下面小题。
2020年7月24日~8月9日第32届夏季奥林匹克运动会即将在日本东京举行。
2014版教材课后习题答案4_7章

P78 第四章3.一物体按规律x =ct 3在流体媒质中作直线运动,式中c 为常量,t 为时间.设媒质对物体的阻力正比于速度的平方,阻力系数为k ,试求物体由x =0运动到x =l 时,阻力所作的功.解:由x =ct 3可求物体的速度: 23d d ct tx==v 1分 物体受到的阻力大小为: 343242299x kc t kc k f ===v 2分力对物体所作的功为:⎰=W W d =⎰-lx x kc 03432d 9 =7273732lkc - 2分4.一人从10 m 深的井中提水.起始时桶中装有10 kg 的水,桶的质量为1 kg ,由于水桶漏水,每升高1 m 要漏去0.2 kg 的水.求水桶匀速地从井中提到井口,人所作的功.解:选竖直向上为坐标y 轴的正方向,井中水面处为原点.由题意知,人匀速提水,所以人所用的拉力F 等于水桶的重量即: F =P =gy mg ky P 2.00-=-=107.8-1.96y (SI) 3分人的拉力所作的功为:W=⎰⎰=Hy F W 0d d =⎰-10d )96.18.107(y y =980 J 2分5.质量m =2 kg 的质点在力i t F ρρ12=(SI)的作用下,从静止出发沿x 轴正向作直线运动,求前三秒该力所作的功.解: ⎰⎰=⋅=t t r F A d 12d v ρρ 1分而质点的速度与时间的关系为200003d 212d 0d t t t t m Ft a t tt==+=+=⎰⎰⎰v v 2分 所以力F ρ所作的功为 ⎰⎰==33302d 36d )3(12t t t t t A =729 J 2分6.如图所示,质量m 为 0.1 kg 的木块,在一个水平面上和一个劲度系数k 为20 N/m 的轻弹簧碰撞,木块将弹簧由原长压缩了x = 0.4 m .假设木块与水平面间的滑动摩擦系数μ k 为0.25,问在将要发生碰撞时木块的速率v 为多少?解:根据功能原理,木块在水平面上运动时,摩擦力所作的功等于系统(木块和弹簧)机械能的增量.由题意有 222121v m kx x f r -=- 而mg f k r μ= 3分由此得木块开始碰撞弹簧时的速率为 mkx gx k 22+=μv1分= 5.83 m/s 1分[另解]根据动能定理,摩擦力和弹性力对木块所作的功,等于木块动能的增量,应有20210v m kxdx mgx xk -=--⎰μ 其中2021kx kxdx x=⎰7.一物体与斜面间的摩擦系数μ = 0.20,斜面固定,倾角α = 45°.现给予物体以初速率v 0 = 10 m/s ,使它沿斜面向上滑,如图所示.求:(1) 物体能够上升的最大高度h ;(2) 该物体达到最高点后,沿斜面返回到原出发点时的速率v .解:(1)根据功能原理,有 mgh m fs -=2021v 2分 ααμαμsin cos sin mgh Nh fs ==mgh m mgh -==2021ctg v αμ 2分)ctg 1(220αμ+=g h v =4.5 m 2分(2)根据功能原理有 fs m mgh =-221v 1分αμctg 212mgh mgh m -=v 1分[]21)ctg 1(2αμ-=gh v =8.16 m/s 2分8.一链条总长为l ,质量为m ,放在桌面上,并使其部分下垂,下垂一段的长度为a .设链条与桌面之间的滑动摩擦系数为μ.令链条由静止开始运动,则 (1)到链条刚离开桌面的过程中,摩擦力对链条作了多少功? (2)链条刚离开桌面时的速率是多少?解:(1)建立如图坐标.某一时刻桌面上全链条长为y ,则摩擦力大小为g lymf μ= 1分 摩擦力的功 ⎰⎰--==00d d a l a l f y gy lmy f W μ 2分=022a l y l mg -μ =2)(2a l lmg--μ 2分(2)以链条为对象,应用质点的动能定理 ∑W =2022121v v m m -其中 ∑W = W P +W f ,v 0 = 0 1分W P =⎰la x P d =la l mg x x l mg la 2)(d 22-=⎰ 2分由上问知 la l mg W f 2)(2--=μ所以222221)(22)(v m a l l mg l a l mg =---μ 得 []21222)()(a l a l lg ---=μv 2分9.劲度系数为k 、原长为l 的弹簧,一端固定在圆周上的A 点,圆周的半径R =l ,弹簧的另一端点从距A 点2l 的B 点沿圆周移动1/4周长到C 点,如图所示.求弹性力在此过程中所作的功.解:弹簧长为AB 时,其伸长量为 l l l x =-=21 1分弹簧长为AC 时,其伸长量为 l l l x )12(22-=-=1分弹性力的功等于弹性势能的减少 2221212121kx kx E E W P P -=-= 2分[]22)12(121--=kl 2)12(kl -= 1分10.一质量为m 的质点在Oxy 平面上运动,其位置矢量为j t b i t a r ρρρωωsin cos +=(SI)式中a 、b 、ω是正值常量,且a >b . (1)求质点在A 点(a ,0)时和B 点(0,b )时的动能;(2)求质点所受的合外力F ρ以及当质点从A 点运动到B 点的过程中F ρ的分力x F ρ和y F ρ分别作的功.解:(1)位矢 j t b i t a r ρρρωωsin cos += (SI) 可写为 t a x ωcos = , t b y ωsin =t a t x x ωωsin d d -==v , t b ty ωωcos d dy-==v在A 点(a ,0) ,1cos =t ω,0sin =t ωE KA =2222212121ωmb m m y x =+v v 2分在B 点(0,b ) ,0cos =t ω,1sin =t ωE KB =2222212121ωma m m y x =+v v 2分(2) j ma i ma F y x ρρρ+==j t mb i t ma ρρωωωωsin cos 22-- 2分由A →B ⎰⎰-==2d cos d a a x x x t a m x F W ωω=⎰=-022221d a ma x x m ωω 2分 ⎰⎰-==b b y y t b m y F W 020dy sin d ωω=⎰-=-b mb y y m 022221d ωω 2分11.某弹簧不遵守胡克定律. 设施力F ,相应伸长为x ,力与伸长的关系为 F =52.8x +38.4x 2(SI )求:(1)将弹簧从伸长x 1=0.50 m 拉伸到伸长x 2=1.00 m 时,外力所需做的功.(2)将弹簧横放在水平光滑桌面上,一端固定,另一端系一个质量为2.17 kg 的物体,然后将弹簧拉伸到一定伸长x 2=1.00 m ,再将物体由静止释放,求当弹簧回到x 1=0.50 m 时,物体的速率.(3)此弹簧的弹力是保守力吗? 解:(1) 外力做的功=31 J 1分(2) 设弹力为F ′⎰⎰⋅+==21d )4.388.52(d 2x x xx x xF W ρρ⎰⎰⋅=-==1212d d 21'2x x x x Wx F x F m ρρv 3分= 5.34 m/s1分(3) 此力为保守力,因为其功的值仅与弹簧的始末态有关. 2分12.如图所示,悬挂的轻弹簧下端挂着质量为m 1、m 2的两个物体,开始时处于静止状态.现在突然把m 1与m 2间的连线剪断,求m 1的最大速度为多少?设弹簧的劲度系数k =8.9×104 N /m ,m 1=0.5 kg ,m 2=0.3 kg .解:以弹簧仅挂重物m 1时,物体静止(平衡)位置为坐标原点,竖直向下为y 轴正向,此时弹簧伸长为: l 1=m 1 g / k ① 1分再悬挂重物m 2后,弹簧再获得附加伸长为l 2=m 2 g /k ② 1分当突然剪断连线去掉m 2后,m 1将上升并开始作简谐振动,在平衡位置处速度最大.根据机械能守恒,有21221)(21gl m l l k -+=21212121kl m m +v ③ 2分 将①、②代入③得 )(v k m g m m 121= ≈0.014 m/s ④ 1分13.用劲度系数为k 的弹簧,悬挂一质量为m 的物体,若使此物体在平衡位置以初速v 突然向下运动,问物体可降低到何处?解:取物体在平衡位置时,重力势能E P =0,设平衡时弹簧的伸长量为x 0,则物体开始向下运动的一瞬间,机械能为2v m kx E 2121201+=1分 设物体刚好又下降x 距离的一瞬间速度为零(不再下降),则该瞬时机械能为mgx x x k E -+=202)(211分 物体运动过程中,只有保守力作功,故系统的机械能守恒:mgx x x k m kx -+=+2020)(2121212v 2分 把kx 0=mg 代入上式,可解得: k m x v = 1分P103 第五章3.一飞轮以等角加速度2 rad /s 2转动,在某时刻以后的5s 飞轮转过了100 rad .若此飞轮是由静止开始转动的,问在上述的某时刻以前飞轮转动了多少时间?mW2=v 3分解:设在某时刻之前,飞轮已转动了t 1时间,由于初角速度 ω 0=0则 ω1β=t 1 ① 1分而在某时刻后t 2 =5 s 时间,转过的角位移为222121t t βωθ+= ② 2分 将已知量=θ100 rad , t 2 =5s , =β 2 rad /s 2代入②式,得ω1 = 15 rad /s 1分从而 t 1 = ω1/=β 7.5s即在某时刻之前,飞轮已经转动了7.5s. 1分4.有一半径为R 的圆形平板平放在水平桌面上,平板与水平桌面的摩擦系数为μ,若平板绕通过其中心且垂直板面的固定轴以角速度ω0开始旋转,它将在旋转几圈后停止?(已知圆形平板的转动惯量221mR J =,其中m 为圆形平板的质量) 解:在r 处的宽度为d r 的环带面积上摩擦力矩为r r r R mgM d 2d 2⋅π⋅π=μ3分 总摩擦力矩 mgR M M R μ32d 0==⎰ 1分故平板角加速度 β =M /J 1分设停止前转数为n ,则转角 θ = 2πn由 J /Mn π==4220θβω 2分可得 g R MJ n μωωπ16/342020=π=1分5.如图所示,转轮A 、B 可分别独立地绕光滑的固定轴O 转动,它们的质量分别为m A =10 kg 和m B =20 kg ,半径分别为r A 和r B .现用力f A 和f B 分别向下拉绕在轮上的细绳且使绳与轮之间无滑动.为使A 、B 轮边缘处的切向加速度相同,相应的拉力f A 、f B 之比应为多少?(其中A 、B 轮绕O 轴转动时的转动惯量分别为221AA A r m J =和221B B B r m J =) 解:根据转动定律f A r A = J A βA ① 1分其中221AA A r m J =,且 f B r B = J B βB ② 1分 其中221B B B r m J =.要使A 、B 轮边上的切向加速度相同,应有a = r A βA = r B βB ③ 1分由①、②式,有BB B AA AB A B A B A B A r m r m r J r J f f ββββ== ④ 由③式有 βA / βB = r B / r A将上式代入④式,得 f A / f B = m A / m B = 212分B A f Ar B r A6.一质量为m 的物体悬于一条轻绳的一端,绳另一端绕在一轮轴的轴上,如图所示.轴水平且垂直于轮轴面,其半径为r ,整个装置架在光滑的固定轴承之上.当物体从静止释放后,在时间t 下降了一段距离S .试求整个轮轴的转动惯量(用m 、r 、t 和S 表示).解:设绳子对物体(或绳子对轮轴)的拉力为T ,则根据牛顿运动定律和转动定律得:mg T =ma ① 2分T r =J β ② 2分 由运动学关系有: a = r β ③ 2分由①、②、③式解得: J =m ( g -a ) r 2 / a ④ 又根据已知条件 v 0=0∴ S =221at , a =2S / t 2 ⑤ 2分将⑤式代入④式得:J =mr 2(Sgt22-1) 2分7.一定滑轮半径为0.1 m ,相对中心轴的转动惯量为1×10-3 kg ·m 2.一变力F =0.5t (SI)沿切线方向作用在滑轮的边缘上,如果滑轮最初处于静止状态,忽略轴承的摩擦.试求它在1 s 末的角速度.解:根据转动定律 M =J d ω / d t 1分 即 d ω=(M / J ) d t 1分其中 M =Fr , r =0.1 m , F =0.5 t ,J =1×10-3 kg ·m 2, 分别代入上式,得d ω=50t d t 1分则1 s 末的角速度 ω1=⎰150t d t =25 rad / s 2分8.一长为1 m 的均匀直棒可绕过其一端且与棒垂直的水平光滑固定轴转动.抬起另一端使棒向上与水平面成60°,然后无初转速地将棒释放.已知棒对轴的转动惯量为231ml ,其中m 和l 分别为棒的质量和长度.求: (1) 放手时棒的角加速度;(2) 棒转到水平位置时的角加速度. 解:设棒的质量为m ,当棒与水平面成60°角并开始下落时,根据转动定律 M = J β1分其中 4/30sin 21mgl mgl M ==ο 1分 于是 2rad/s 35.743 ===lgJ M β 1分当棒转动到水平位置时, M =21mgl 1分那么 2rad/s 7.1423 ===lg J M β 1分9.长为L 的梯子斜靠在光滑的墙上高为h 的地方,梯子和地面间的静摩擦系数为μ,若梯子的重量忽略,试问人爬到离地面多高的地方,梯子就会滑倒下来?解:当人爬到离地面x 高度处梯子刚要滑下,此时梯子与地面间为最大静摩擦,仍处于平衡状态 (不稳定的) .1分 N 1-f =0, N 2-P =0 1分N 1h -Px ·ctg θ =0 1分f =μN 2 1分 解得 222/tg h L h h x -=⋅=μθμ 1分10.有一半径为R 的均匀球体,绕通过其一直径的光滑固定轴匀速转动,转动周期为T 0.如它的半径由R 自动收缩为R 21,求球体收缩后的转动周期.(球体对于通过直径的轴的转动惯量为J =2mR 2 / 5,式中m 和R 分别为球体的质量和半径).解:球体的自动收缩可视为只由球的力所引起,因而在收缩前后球体的角动量守恒. 1分 设J 0和ω 0、J 和ω分别为收缩前后球体的转动惯量和角速度, 则有J 0ω 0 = J ω ① 2分由已知条件知:J 0 = 2mR 2 / 5,J = 2m (R / 2)2 / 5代入①式得 ω = 4ω 0 1分即收缩后球体转快了,其周期442200T T =π=π=ωω1分 周期减小为原来的1 / 4. 11.一匀质细棒长为2L ,质量为m ,以与棒长方向相垂直的速度v 0在光滑水平面平动时,与前方一固定的光滑支点O 发生完全非弹性碰撞.碰撞点位于棒中心的一侧L 21处,如图所示.求棒在碰撞后的瞬时绕O 点转动的角速度ω.(细棒绕通过其端点且与其垂直的轴转动时的转动惯量为231ml ,式中的m 和l 分别为棒的质量和长度.)解:碰撞前瞬时,杆对O 点的角动量为L m L x x x x L L 0202/002/30021d d v v v v ==-⎰⎰ρρρ 3分式中ρ为杆的线密度.碰撞后瞬时,杆对O 点的角动量为ωωω2221272141234331mL L m L m J =⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫⎝⎛+⎪⎭⎫ ⎝⎛= 3分 因碰撞前后角动量守恒,所以L m mL 022112/7v =ω 3分 ∴ ω = 6v 0 / (7L) 1分12.如图所示,长为l 的轻杆,两端各固定质量分别为m 和2m 的小球,杆可绕水平光滑固定轴O 在竖直面转动,转轴O 距两端分别为31lLh N 1 h N 2 P R θ R x RfL21L 21L O0v0v2m mmO21v 0v ϖl32l31和32l .轻杆原来静止在竖直位置.今有一质量为m 的小球,以水平速度0v ϖ与杆下端小球m 作对心碰撞,碰后以021v ϖ的速度返回,试求碰撞后轻杆所获得的角速度.解:将杆与两小球视为一刚体,水平飞来小球与刚体视为一系统.由角动量守恒得 1分ωJ l m lm +-=3223200v v (逆时针为正向) ① 2分 又 22)3(2)32(l m l m J += ② 1分将②代入①得 l230v =ω 1分13.一半径为25 cm 的圆柱体,可绕与其中心轴线重合的光滑固定轴转动.圆柱体上绕上绳子.圆柱体初角速度为零,现拉绳的端点,使其以1 m/s 2的加速度运动.绳与圆柱表面无相对滑动.试计算在t = 5 s 时(1) 圆柱体的角加速度, (2) 圆柱体的角速度,(3) 如果圆柱体对转轴的转动惯量为2 kg ·m 2,那么要保持上述角加速度不变,应加的拉力为多少?解:(1) 圆柱体的角加速度 ββ=a / r =4 rad / s 2 2分(2) 根据t t 0βωω+=,此题中ω 0 = 0 ,则 有ωt = βt那么圆柱体的角速度====55 t t t βω20 rad/s 1分(3) 根据转动定律 fr = J β则 f = J β / r = 32 N 2分14.一台摆钟每天快1分27秒,其等效摆长l = 0.995 m , 摆锤可上、下移动以调节其周期.假如将此摆当作质量集中在摆锤中心的一个单摆来考虑,则应将摆锤向下移动多少距离,才能使钟走得准确?解:钟摆周期的相对误差∆T / T =钟的相对误差∆t / t 2分等效单摆的周期 g l T /2π=,设重力加速度g 不变,则有 2分2d T / T =d l / l 1分令∆T = d T ,∆l = d l ,并考虑到∆T / T = ∆t / t ,则摆锤向下移动的距离∆l = 2l ∆t / t =8640087995.02⨯⨯ mm = 2.00 mm即摆锤应向下移2.00 mm ,才能使钟走得准确. 3分P124 第六章3.一体积为V 0,质量为m 0的立方体沿其一棱的方向相对于观察者A 以速度v 运动.求:观察者A 测得其密度是多少?解:设立方体的长、宽、高分别以x 0,y 0,z 0表示,观察者A 测得立方体的长、宽、高分别为 221cx x v -=,0y y =,0z z =.相应体积为 2201cV xyz V v -== 3分观察者A测得立方体的质量 2201cm m v -=故相应密度为V m /=ρ22022011/c V c m v v --=)1(2200cV m v -=2分4.一艘宇宙飞船的船身固有长度为L 0 =90 m ,相对于地面以=v 0.8 c (c 为真空中光速)的匀速度在地面观测站的上空飞过.(1) 观测站测得飞船的船身通过观测站的时间间隔是多少? (2) 宇航员测得船身通过观测站的时间间隔是多少?解:(1) 观测站测得飞船船身的长度为 =-=20)/(1c L L v 54 m则 ∆t 1 = L /v =2.25×10-7 s 3分(2) 宇航员测得飞船船身的长度为L 0,则∆t 2 = L 0/v =3.75×10-7 s 2分5.一电子以=v 0.99c (c 为真空中光速)的速率运动.试求: (1) 电子的总能量是多少?(2) 电子的经典力学的动能与相对论动能之比是多少?(电子静止质量m e =9.11×10-31 kg)解:(1) 222)/(1/c c m mc E e v -== =5.8×10-13 J 2分(2) 20v 21e K m E == 4.01×10-14 J 22c m mc E e K -=22]1))/(1/1[(c m c e --=v = 4.99×10-13 J∴ =K K E E /08.04×10-2 3分P150 第七章 3.一物体在光滑水平面上作简谐振动,振幅是12 cm ,在距平衡位置6 cm 处速度是24 cm/s ,求(1)周期T ;(2)当速度是12 cm/s 时的位移.解:设振动方程为t A x ωcos =,则 t A ωωsin -=v(1) 在x = 6 cm ,v = 24 cm/s 状态下有 t ωcos 126= t ωωsin 1224-=解得 3/4=ω,∴ 72.2s 2/3/2=π=π=ωT s 2分 (2) 设对应于v =12 cm/s 的时刻为t 2,则由t A ωωsin -=v 得 2sin )3/4(1212t ω⨯⨯-=, 解上式得 1875.0sin 2-=t ω 相应的位移为8.10sin 1cos 222±=-±==t A t A x ωω cm 3分4.一质点作简谐振动,其振动方程为 )4131cos(100.62π-π⨯=-t x (SI)(1) 当x 值为多大时,系统的势能为总能量的一半?(2) 质点从平衡位置移动到上述位置所需最短时间为多少? 解:(1) 势能 221kx W P =总能量 221kA E = 由题意,4/2122kA kx =, 21024.42-⨯±=±=A x m 2分 (2) 周期 T = 2π/ω = 6 s 从平衡位置运动到2A x ±=的最短时间 ∆t 为 T /8.∴ ∆t = 0.75 s . 3分5.在一轻弹簧下端悬挂m 0 = 100 g 砝码时,弹簧伸长8 cm .现在这根弹簧下端悬挂m = 250 g 的物体,构成弹簧振子.将物体从平衡位置向下拉动4 cm ,并给以向上的21 cm/s 的初速度(令这时t = 0).选x 轴向下, 求振动方程的数值式. 解: k = m 0g / ∆l 25.12N/m 08.08.91.0=⨯=N/m11s 7s 25.025.12/--===m k ω 2分 5cm )721(4/2222020=+=+=ωv x A cm 2分4/3)74/()21()/(tg 00=⨯--=-=ωφx v ,φ = 0.64 rad 3分 )64.07cos(05.0+=t x (SI) 1分6.质量m = 10 g 的小球与轻弹簧组成的振动系统,按)318cos(5.0π+π=t x 的规律作自由振动,式中t 以秒作单位,x 以厘米为单位,求(1) 振动的角频率、周期、振幅和初相;O x(2) 振动的速度、加速度的数值表达式;(3) 振动的能量E ;(4) 平均动能和平均势能.解:(1) A = 0.5 cm ;ω = 8π s -1;T = 2π/ω = (1/4) s ;φ = π/3 2分(2) )318sin(1042π+π⨯π-==-t x &v (SI) )318cos(103222π+π⨯π-==-t x a && (SI) 2分 (3) 2222121A m kA E E E P K ω==+==7.90×10-5 J 3分 (4) 平均动能 ⎰=T K t m T E 02d 21)/1(v ⎰π+π⨯π-=-Tt t m T 0222d )318(sin )104(21)/1( = 3.95×10-5 J = E 21 同理 E E P 21== 3.95×10-5 J 3分7.在一竖直轻弹簧的下端悬挂一小球,弹簧被拉长l 0 = 1.2 cm 而平衡.再经拉动后,该小球在竖直方向作振幅为A = 2 cm 的振动,试证此振动为简谐振动;选小球在正最大位移处开始计时,写出此振动的数值表达式.解:设小球的质量为m ,则弹簧的劲度系数 0/l mg k =. 选平衡位置为原点,向下为正方向.小球在x 处时,根据牛顿第二定律得 220d /d )(t x m x l k mg =+- 将 0/l mg k = 代入整理后得 0//d d 022=+l gx t x∴ 此振动为简谐振动,其角频率为. 3分π===1.958.28/0l g ω 2分设振动表达式为 )cos(φω+=t A x 由题意: t = 0时,x 0 = A=2102-⨯m ,v 0 = 0,解得 φ = 0 1分 ∴ )1.9cos(1022t x π⨯=- 2分8.在竖直悬挂的轻弹簧下端系一质量为 100 g 的物体,当物体处于平衡状态时,再对物体加一拉力使弹簧伸长,然后从静止状态将物体释放.已知物体在32 s 完成48次振动,振幅为5 cm .(1) 上述的外加拉力是多大?(2) 当物体在平衡位置以下1 cm 处时,此振动系统的动能和势能各是多少?解一:(1) 取平衡位置为原点,向下为x 正方向.设物体在平衡位置时弹簧的伸长量为∆l ,则有l k mg ∆=, 加拉力F 后弹簧又伸长x 0,则+x )0)(0=+-+∆x l k mg F解得F = kx 0 2分 由题意,t = 0时v 0 = 0;x = x 0 则 02020)/(x x A =+=ωv 2分 又由题给物体振动周期4832=T s, 可得角频率 Tπ=2ω, 2ωm k = ∴ 444.0)/4(22=π==A T m kA F N 1分(2) 平衡位置以下1 cm 处: )()/2(2222x A T -π=v 2分221007.121-⨯==v m E K J 2分 2222)/4(2121x T m kx E p π== = 4.44×10-4 J 1分 解二:(1) 从静止释放,显然拉长量等于振幅A (5 cm ), kA F = 2分 2224νωπ==m m k ,ν = 1.5 Hz 2分 ∴ F = 0.444 N 1分 (2) 总能量 221011.12121-⨯===FA kA E J 2分 当x = 1 cm 时,x = A /5,E p 占总能量的1/25,E K 占24/25. 2分 ∴ 21007.1)25/24(-⨯==E E K J ,41044.425/-⨯==E E p J 1分9.一质点同时参与两个同方向的简谐振动,其振动方程分别为x 1 =5×10-2cos(4t + π/3) (SI) , x 2 =3×10-2sin(4t - π/6) (SI)画出两振动的旋转矢量图,并求合振动的振动方程.解: x 2 = 3×10-2 sin(4t - π/6)= 3×10-2cos(4t - π/6- π/2)= 3×10-2cos(4t - 2π/3).作两振动的旋转矢量图,如图所示. 图2分由图得:合振动的振幅和初相分别为A = (5-3)cm = 2 cm ,φ = π/3. 2分合振动方程为 x = 2×10-2cos(4t + π/3) (SI)1分10.一轻弹簧在60 N 的拉力下伸长30 cm .现把质量为4 kg 的物体悬挂在该弹簧的下端并使之静止 ,再把物体向下拉10 cm ,然 后由静止释放并开始计时.求(1) 物体的振动方程;(2) 物体在平衡位置上方5 cm 时弹簧对物体的拉力;(3) 物体从第一次越过平衡位置时刻起到它运动到上方5 cm 解: k = f/x =200 N/m , 07.7/≈=m k ω rad/s 2分(1) 选平衡位置为原点,x 轴指向下方(如图所示), t = 0时, x 0 = 10A cos φ ,v 0 = 0 = -A ωsin φ. 解以上二式得 A = 10 cm ,φ = 0. 2分∴ 振动方程x = 0.1 cos(7.07t ) (SI) 1分(2) 物体在平衡位置上方5 cm 时,弹簧对物体的拉力f = m (g -a ),而a = -ω2x = 2.5 m/s 2 x 5 cm O∴ f =4 (9.8-2.5) N= 29.2 N 3分(3) 设t 1时刻物体在平衡位置,此时x = 0,即0 = A cos ω t 1或cos ω t 1 = 0.∵ 此时物体向上运动, v < 0∴ ω t 1 = π/2, t 1= π/2ω = 0.222 s 1分 再设t 2时物体在平衡位置上方5 cm 处,此时x = -5,即-5 = A cos ω t 1,cos ω t 1 =-1/2∵ v < 0, ω t 2 = 2π/3,t 2=2 π/3ω =0.296 s 2分 ∆t = t 1-t 2 = (0.296-0.222) s =0.074 s 1分11.一质点在x 轴上作简谐振动,选取该质点向右运动通过A 点时作为计时起点( t = 0 ),经过2秒后质点第一次经过B 点,再经过2秒后质点第二次经过B 点,若已知该质点在A 、B 两点具有相同的速率,且AB = 10 cm 求: (1) 质点的振动方程; (2) 质点在A 点处的速率.解:由旋转矢量图和 |v A | = |v B | 可知 T /2 = 4秒,∴ T = 8 s , ν = (1/8) s -1,ω = 2πν = (π /4) s -1 3分(1) 以AB 的中点为坐标原点,x 轴指向右方.t = 0时, 5-=x cm φcos A =t = 2 s 时, 5=x cm φφωsin )2cos(A A -=+=由上二式解得 tg φ = 1因为在A 点质点的速度大于零,所以φ = -3π/4或5π/4(如图) 2分 25cos /==φx A cm 1分 ∴ 振动方程 )434cos(10252π-π⨯=-t x (SI) 1分 (2) 速率 )434sin(41025d d 2π-π⨯π-==-t t x v (SI) 2分 当t = 0 时,质点在A 点221093.3)43sin(10425d d --⨯=π-⨯π-==t x v m/s 1分12.一物体作简谐振动,其速度最大值v m = 3×10-2 m/s ,其振幅A = 2×10-2 m .若t = 0时,物体位于平衡位置且向x 轴的负方向运动. 求:(1) 振动周期T ;(2) 加速度的最大值a m ;(3) 振动方程的数值式.解: (1) v m = ωA ∴ω = v m / A =1.5 s -1∴T = 2π/ω = 4.19 s 3分(2) a m = ω2A = v m ω = 4.5×10-2 m/s 2 2分 (3) π=21φ x = 0.02)215.1cos(π+t (SI) 3分13.在一平板上放一质量为m =2 kg 的物体,平板在竖直方向作简谐振动,其振动周期为TA B v ρx= 21s ,振幅A = 4 cm ,求 (1) 物体对平板的压力的表达式.(2) 平板以多大的振幅振动时,物体才能离开平板?解:选平板位于正最大位移处时开始计时,平板的振动方程为t A x π=4cos (SI)t A x π4cos π162-=&& (SI) 1分(1) 对物体有 xm N mg &&=- ① 1分 t A mg x m mg N ππ+=-=4cos 162&&(SI) ② 物对板的压力为 t A mg N F ππ--=-=4cos 162 (SI)t ππ--=4cos 28.16.192 ③ 2分(2) 物体脱离平板时必须N = 0,由②式得 1分 04cos 162=ππ+t A mg (SI)A q t 2164cos π-=π 1分 若能脱离必须 14cos ≤πt (SI)即 221021.6)16/(-⨯=π≥g A m 2分14.一物体质量为0.25 kg ,在弹性力作用下作简谐振动,弹簧的劲度系数k = 25 N ·m -1,如果起始振动时具有势能0.06 J 和动能0.02 J ,求(1) 振幅;(2) 动能恰等于势能时的位移;(3) 经过平衡位置时物体的速度.解:(1) 221kA E E E p K =+= 2/1]/)(2[k E E A p K +== 0.08 m 3分(2)222121v m kx = )(sin 22222φωωω+=t A m x m)(sin 222φω+=t A x 2222)](cos 1[x A t A -=+-=φω 222A x =, 0566.02/±=±=A x m 3分(3) 过平衡点时,x = 0,此时动能等于总能量221v m E E E p K =+= 8.0]/)(2[2/1±=+=m E E p K v m/s 2分 x &&。
【精品】电气控制与plc17章课后答案
第一章作业参考答案1。
电磁式电器主要由哪几部分组成?各部分作用是什么?答:主要由触头、每户装置和电磁机构组成。
触头是执行部件通过触头的动作来接通或断开被控电路。
灭弧装置作用,熄灭电弧。
电磁机构是电磁式低压电器的感测部件,作用是将电磁能量转换成机械能量,带动触头动作,从而实现电路的接通或分断。
2、何谓电磁机构的吸力特性与反力特性?吸力特性与反力特性之间应满足怎样的配合关系?答:电磁机构使衔铁吸合的力与气隙长度的关系曲线称作吸力特性;电磁机构使衔铁释放(复位)的力与气隙长度的关系曲线称作反力特性。
电磁机构欲使衔铁吸合,在整个吸合过程中,吸力都必须大于反力。
反映在特性图上就是要保持吸力特性在反力特性的上方且彼此靠近。
3、单相交流电磁铁的短路环断裂或脱落后,在工作中会出现什么现象?为什么?答:在工作中会出现衔铁产生强烈的振动并发出噪声,甚至使铁芯松散得到现象。
原因是:电磁机构在工作中,衔铁始终受到反力Fr的作用.由于交流磁通过零时吸力也为零,吸合后的衔铁在反力Fr作用下被拉开.磁通过零后吸力增大,当吸力大于反力时衔铁又被吸合。
这样,在交流电每周期内衔铁吸力要两次过零,如此周而复始,使衔铁产生强烈的振动并发出噪声,甚至使铁芯松散。
4.常用的灭弧方法有哪些?答:多断点灭弧,磁吹式灭弧,灭弧栅,灭弧罩。
5、接触器的作用是什么?根据结构特征如何区分交、直流接触器?答:接触器的作用是控制电动机的启停、正反转、制动和调速等。
交流接触器的铁芯用硅钢片叠铆而成,而且它的激磁线圈设有骨架,使铁芯与线圈隔离并将线圈制成短而厚的矮胖型,这样有利于铁芯和线圈的散热。
直流接触器的铁芯通常使用整块钢材或工程纯铁制成,而且它的激磁线圈制成高而薄的瘦高型,且不设线圈骨架,使线圈与铁芯直接接触,易于散热。
8、热继电器在电路中的作用是什么?带断相保护和不带断相保护的三相式热继电器各用在什么场合?答:热继电器利用电流的热效应原理以及发热元件热膨胀原理设计,可以实现三相电动机的过载保护。
操作系统第五版--精髓与设计概要第7章课后习题答案2

7.1.如果使用动态分区方案,下图所示为在某个给定的时间点的内存配置:阴影部分为已经被分配的块;空白部分为空闲块。
接下来的三个内存需求分别为40MB,20MB和10MB。
分别使用如下几种放置算法,指出给这三个需求分配的块的起始地址。
a.首次适配b.最佳适配c.临近适配(假设最近添加的块位于内存的开始)d.最坏适配答:a.40M的块放入第2个洞中,起始地址是80M. 20M的块放入第一个洞中.起始地址是20M. 10M的块的起始地址是120M。
b.40M,20N,10M的起始地址分别为230M,20M和160M.c.40M,20M,10M的起始地址是80M,120160M.d.40M,20M,10M,的起始地址是80M,230M,360M.7.2.使用伙伴系统分配一个1MB的存储块。
a.利用类似于图7.6的图来说明按下列顺序请求和返回的结果:请求70;请求35;请求80;返回A;请求60;返回B;返回D;返回C。
b.给出返回B之后的二叉树表示。
答:a.b.7.3.考虑一个伙伴系统,在当前分配下的一个特定块地址为011011110000.a.如果块大小为4,它的伙伴的二进制地址为多少?b.如果块大小为16,它的伙伴的二进制地址为多少?答:a.011011110100b.0110111000007.4.令buddy k(x)为大小为2k、地址为x的块的伙伴的地址,写出buddy k(x)的通用表达式。
答:7.5.Fabonacci序列定义如下:F0=0,F1=1,F n+2=F n+1+F n,n≧0a.这个序列可以用于建立伙伴系统吗?b.该伙伴系统与本章介绍的二叉伙伴系统相比,有什么优点?答:a.是。
字区大小可以确定Fn = Fn-1 + Fn-2.。
b.这种策略能够比二叉伙伴系统提供更多不同大小的块,因而具有减少内部碎片的可能性。
但由于创建了许多没用的小块,会造成更多的外部碎片。
7.6.在程序执行期间,每次取指令后处理器把指令寄存器的内容(程序计数器)增加一个字,但如果遇到会导致在程序中其他地址继续执行的转跳或调用指令,处理器将修改这个寄存器的内容。
第六七章 作业与习题参考答案
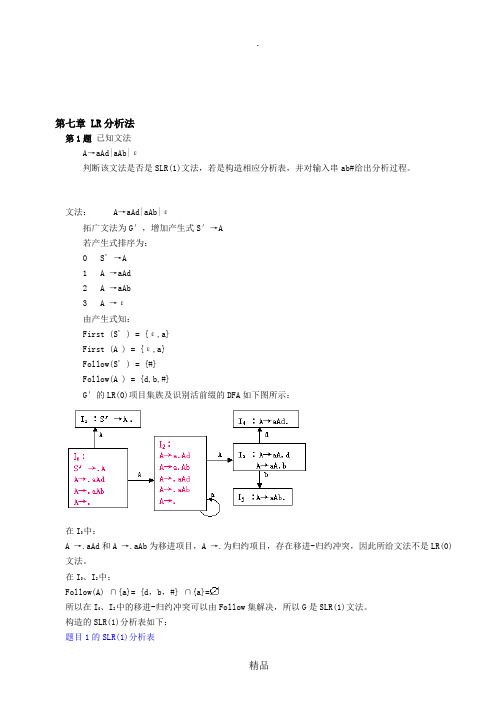
第七章 LR分析法第1题已知文法A→aAd|aAb|ε判断该文法是否是SLR(1)文法,若是构造相应分析表,并对输入串ab#给出分析过程。
文法:A→aAd|aAb|ε拓广文法为G′,增加产生式S′→A若产生式排序为:0 S' →A1 A →aAd2 A →aAb3 A →ε由产生式知:First (S' ) = {ε,a}First (A ) = {ε,a}Follow(S' ) = {#}Follow(A ) = {d,b,#}G′的LR(0)项目集族及识别活前缀的DFA如下图所示:在I0中:A →.aAd和A →.aAb为移进项目,A →.为归约项目,存在移进-归约冲突,因此所给文法不是LR(0)文法。
在I0、I2中:Follow(A) ∩{a}= {d,b,#} ∩{a}=所以在I0、I2中的移进-归约冲突可以由Follow集解决,所以G是SLR(1)文法。
构造的SLR(1)分析表如下:题目1的SLR(1)分析表的分析过程题目1对输入串ab#第2题若有定义二进制数的文法如下:S→L.L|LL→LB|BB→0|1(1) 试为该文法构造LR分析表,并说明属哪类LR分析表。
(2) 给出输入串101.110的分析过程。
解:文法:S→L.L|LL→LB|BB→0|1拓广文法为G′,增加产生式S′→S若产生式排序为:0 S' →S1 S →L.L2 S →L3 L →LB4 L →B5 B →06 B →1由产生式知:First (S' ) = {0,1}First (S ) = {0,1}First (L ) = {0,1}First (B ) = {0,1}Follow(S' ) = {#}Follow(S ) = {#}Follow(L ) = {.,0,1,#}Follow(B ) = {.,0,1,#}G′的LR(0)项目集族及识别活前缀的DFA如下图所示:在I2中:B →.0和B →.1为移进项目,S →L.为归约项目,存在移进-归约冲突,因此所给文法不是LR(0)文法。
电气控制与plc应用技术课后答案(全)

第一章课后习题参考答案2、何谓电磁机构的吸力特性与反力特性?吸力特性与反力特性之间应满足怎样的配合关系?答:电磁机构使衔铁吸合的力与气隙长度的关系曲线称作吸力特性;电磁机构使衔铁释放(复位)的力与气隙长度的关系曲线称作反力特性。
电磁机构欲使衔铁吸合,在整个吸合过程中,吸力都必须大于反力。
反映在特性图上就是要保持吸力特性在反力特性的上方且彼此靠近。
3、单相交流电磁铁的短路环断裂或脱落后,在工作中会出现什么现象?为什么?答:在工作中会出现衔铁产生强烈的振动并发出噪声,甚至使铁芯松散得到现象。
原因是:电磁机构在工作中,衔铁始终受到反力Fr的作用。
由于交流磁通过零时吸力也为零,吸合后的衔铁在反力Fr作用下被拉开。
磁通过零后吸力增大,当吸力大于反力时衔铁又被吸合。
这样,在交流电每周期内衔铁吸力要两次过零,如此周而复始,使衔铁产生强烈的振动并发出噪声,甚至使铁芯松散。
5、接触器的作用是什么?根据结构特征如何区分交、直流接触器?答:接触器的作用是控制电动机的启停、正反转、制动和调速等。
交流接触器的铁芯用硅钢片叠铆而成,而且它的激磁线圈设有骨架,使铁芯与线圈隔离并将线圈制成短而厚的矮胖型,这样有利于铁芯和线圈的散热。
直流接触器的铁芯通常使用整块钢材或工程纯铁制成,而且它的激磁线圈制成高而薄的瘦高型,且不设线圈骨架,使线圈与铁芯直接接触,易于散热。
8、热继电器在电路中的作用是什么?带断相保护和不带断相保护的三相式热继电器各用在什么场合?答:热继电器利用电流的热效应原理以及发热元件热膨胀原理设计,可以实现三相电动机的过载保护。
三角形接法的电动机必须用带断相保护的三相式热继电器;Y 形接法的电动机可用不带断相保护的三相式热继电器。
9、说明热继电器和熔断器保护功能的不同之处。
答:热继电器在电路中起过载保护的作用,它利用的是双金属片的热膨胀原理,并且它的动作有一定的延迟性;熔断器在电路中起短路保护的作用,它利用的是熔丝的热熔断原理,它的动作具有瞬时性。
现代电气控制及PLC应用技术王永华课后答案
第一章作业参考答案2、何谓电磁机构的吸力特性与反力特性?吸力特性与反力特性之间应满足怎样的配合关系?答:电磁机构使衔铁吸合的力与气隙长度的关系曲线称作吸力特性;电磁机构使衔铁释放(复位)的力与气隙长度的关系曲线称作反力特性。
电磁机构欲使衔铁吸合,在整个吸合过程中,吸力都必须大于反力。
反映在特性图上就是要保持吸力特性在反力特性的上方且彼此靠近。
3、单相交流电磁铁的短路环断裂或脱落后,在工作中会出现什么现象?为什么?答:在工作中会出现衔铁产生强烈的振动并发出噪声,甚至使铁芯松散得到现象。
原因是:电磁机构在工作中,衔铁始终受到反力Fr的作用。
由于交流磁通过零时吸力也为零,吸合后的衔铁在反力Fr作用下被拉开。
磁通过零后吸力增大,当吸力大于反力时衔铁又被吸合。
这样,在交流电每周期内衔铁吸力要两次过零,如此周而复始,使衔铁产生强烈的振动并发出噪声,甚至使铁芯松散。
5、接触器的作用是什么?根据结构特征如何区分交、直流接触器?答:接触器的作用是控制电动机的启停、正反转、制动和调速等。
交流接触器的铁芯用硅钢片叠铆而成,而且它的激磁线圈设有骨架,使铁芯与线圈隔离并将线圈制成短而厚的矮胖型,这样有利于铁芯和线圈的散热。
直流接触器的铁芯通常使用整块钢材或工程纯铁制成,而且它的激磁线圈制成高而薄的瘦高型,且不设线圈骨架,使线圈与铁芯直接接触,易于散热。
8、热继电器在电路中的作用是什么?带断相保护和不带断相保护的三相式热继电器各用在什么场合?答:热继电器利用电流的热效应原理以及发热元件热膨胀原理设计,可以实现三相电动机的过载保护。
三角形接法的电动机必须用带断相保护的三相式热继电器;Y形接法的电动机可用不带断相保护的三相式热继电器。
9、说明热继电器和熔断器保护功能的不同之处。
答:热继电器在电路中起过载保护的作用,它利用的是双金属片的热膨胀原理,并且它的动作有一定的延迟性;熔断器在电路中起短路保护的作用,它利用的是熔丝的热熔断原理,它的动作具有瞬时性。
人工智能(AI)-7-8章作业参考答案
《人工智能原理》课程习题解答7.4 证明下列的每个断言:a. α是合法的当且仅当α=|Trueb. 对于任意的α,α=|Falsec. βα=|当且仅当)(βα⇒是合法的d. βα≡是合法的当且仅当)(βα⇔是合法的e. βα=|当且仅当)(βα⌝∧是不合法的说明:βα=|当且仅当在所有α为真的模型中,β也为真;当且仅当α为真且β为假时,βα⇒为假。
以下的证明将直接从上述定义出发进行。
使用集合论的表示方法可以更简洁的表示为)()(βαM M ⊆。
a. 一个语句合法即其在所有的模型中均为真。
语句True 在所有的模型中都是合法的。
因此当α合法则α=|True 成立(因为在所有的模型中True 和α都成立);如果α=|True 成立,则α一定是合法的,因为在所有True 成立的模型中α必为真。
b. False 在所有的模型中均不成立,所以在所有False 成立的模型中有α成立(诡辩,其实没有这样的模型)。
c. 假设βα=|,考虑任意模型m 。
若在模型m 中α为真,则由假设可知β在模型m 中也为真,所以βα⇒在m 中也为真。
另外,当α在m 为假,则βα⇒在m 中为真。
因此βα⇒是合法的。
反过来,假设βα⇒是合法的。
考虑任意α为真的模型m ,β必定也为真,否则模型m 无法满足βα⇒。
所以有βα=|。
d. 应用c 的结论从两个方向进行证明可得。
e. 由c 推出,因为βα⌝∧是不可满足的只有当βα⇒是合法的。
7.5 考虑一个只有4个命题A 、B 、C 和D 的词表。
对于下列语句分别有多少个模型?a. )()(C B B A ∧∨∧b. B A ∨c. C B A ⇔⇔说明:通过计算真值表中为真的数目得到答案。
记住不要忘记计算那些语句中没有提到的命题;如果一个语句只提到A 和B ,那么不要忘记在},{B A 模型数目基础上乘上22(因为要考虑C 和D )。
a. 6 提示:仅考虑语句中出现的命题,即},,{C B A 模型数(语句为真)为3,考虑隐含的命题D ,所以应乘上21。
社会调查研究与方法作业三参考答案
作业三(第7章--第9章)习题部分一、填空题(每空1分,共10分)1、访谈法按照操作方式和内容可分为结构式访谈和非结构式访谈。
2、按照被访者发表意见的形式不同,集体访谈可分为两大类:一类是各抒己见式的访谈,以头脑风暴法为代表;一类是讨论式的访谈,其代表是反头脑风暴法。
3、观察记录的方式主要有两种:一种是当场记录,一种是事后记录。
4、为了搜集到真实可信的资料,采用观察法时应遵循客观性原则、全方位原则、求真务本原则和法律和道德伦理原则5、实验法有几个基本要素:一是实验主体,二是实验对象和实验环境,三是实验活动。
二、选择题单选题(每题1分,共5分)1、访谈法最基本和最常用的类型是(D)。
A、深度访谈B、自由访谈C、重点访谈D、个别访谈2、一般的访谈时间最好为(C)。
A、4~5小时B、3~4小时C、1~2小时D、半~1小时3、观察法与其他调查方法之间最根本的区别是( B)。
A、以人的感觉器官为主要调查工具B、收集社会初级信息或原始资料C、它是有目的、有计划的自觉活动D、观察的是保持自然状态的客观事物4、既有实验组又有控制组或对照组的实验方法是( A )。
A、平等实验B、连续实验C、单盲实验D、双盲实验5、检验多个自变量的引入顺序对因变量的影响的设计是( C )A、因子设计B、重复测量设计C、拉丁方格设计D、多因素实验设计多选题(每题2分,共10分)1、不同性质、不同内容的访谈对于访谈者的不同要求主要是(ABCF )A、性别B、年龄C、籍贯D、品质E、形象气质F、知识结构2、在观察对象方面,产生观察误差的因素主要有( CDE)A、观察手段B、观察内容C、被观察者的反应D、人为的假象E、事物本质的显现程度F、难以进行定量分析3、观察法的局限性主要是(ABCDF)A、资料整理和分析难度大B、受时间空间条件的限制C、获得合作有一定难度D、易受观察者主观因素的影响E、难以进行定性分析F、难以进行定量分析4、简单实验设计包括(ABD )A、两组无前测实验设计B、单组前后测实验设计C、两组前后测实验设计D、两组前后测实验设计E、四组前后测实验设计F、多组前后测实验设计5、排除与实验无关的社会环境因素对实验过程和干扰的主要方法有( ABDE)A、排除法B、纳入法C、比较法D、平衡法E、统计分析法F、分类法三、简答题(20分,每题10分)1、如何顺利进入实地观察现场答:正式实施观察首先要保证能够顺利进入观察现场。
第1-7章C++面向对象程序设计 作业参考答案
cout<<"long"<<max(a2,b2)<<endl;
cout<<"double"<<max(a3,b3)<<endl;//使用相同的函数名求不同类型数据的绝对值
return 0;
}
int max(int a,int b)
{int c;
一个类的内部数据结构和其所有成员函数的定义部分称为类的实现。
2.3公用public成员和私有private成员有何区别?
【解答】
私有private成员只能被该类中的其他成员访问,而程序中的其它代码是不能直接访问这些变量的。
公用public成员既可以被该类的其他成员访问,也可以被程序中的其它代码访问。类中的公用成员对外部代码是开放的,通常情况下,程序中的其它代码通过类的公用成员函数来访问类的私有成员。
方法:面向对象程序设计中的术语“方法”对应于对象的行为(能力),即它是实现对象所具有的功能操作的代码段。在C++程序中,方法即是类中定义的成员函数,它是该类对象所能执行的操作的算法实现。
消息:在面向对象的程序中,一个对象向另一个对象发出的请求称为消息。消息是要求某个对象执行其中某个功能操作的规格说明。程序中的所有对象通过消息传递实现相互协作,完成一些特定的任务。
{ Rectangle Rect(10,15);
cout<<"Area is:"<<Rect.area()<<endl;
}
第
3.1解释下列名词:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.13 80X86系统中,用来确定硬件中断服务程序的入口地址的 系统中, 系统中 是 。 (C) ) A.主程序中的调用指令 主程序中的调用指令 B.主程序中的转移指令 主程序中的转移指令 C.中断控制器发出的类型码 中断控制器发出的类型码 D.中断控制器中的中断服务寄存器 中断控制器中的中断服务寄存器ISR 中断控制器中的中断服务寄存器 1.14 CPU通常在 时响应中断。 通常在 时响应中断。 (D) ) A. 取指周期结束 B. 外设提出中断申请 C. INTR为高电平 为高电平 D. 一条指令结束 1.15 80X86系统中, IRET指令执行的出栈恢复操作不包括断 系统中, IRET指令执行的出栈恢复操作不包括断 系统中 点处的 。 (B) ) A. CS B. SS C. FLAGS D. IP
第7章作业参考答案 章作业参考答案
一、单选题:将正确答案的序号填入 单选题: 上 。 1.1 在PC/XT微机中,NMI中断的中断向量在中断向量表中的 微机中, 微机中 中断的中断向量在中断向量表中的 。(C) 位置是 。( ) A. 由程序指定的 B. 由DOS自动分配的 自动分配的 C. 固定在 固定在0008H开始的 个字节中 开始的4个字节中 开始的 D. 固定在中断向量表的表首 1.2 如果有多个中断同时发生,系统将根据中断优先级响应优 如果有多个中断同时发生, 先级最高的中断请求。若要调整中断事件的响应顺序, 先级最高的中断请求。若要调整中断事件的响应顺序,可以利 。 (B) ) 用 A. 中断响应 A. NMI B. 中断屏蔽 B. INTR C. 中断向量 D. 中断嵌套 。(C) 。( ) D. 单步中断 1 1.3 8086对下列中断优先级响应最高的请求是 对下列中断优先级响应最高的请求是 C. 内部软件中断
8
三、简答题 3.1 8255A的方式选择控制字和端口 置0/置1控制字都是写 的方式选择控制字和端口C置 置 控制字都是写 的方式选择控制字和端口 入控制端口的, 是怎样识别的? 入控制端口的,8255A是怎样识别的? 是怎样识别的 解:通过最高位识别,D7=1,为方式选择控制字;D7=0, 通过最高位识别, ,为方式选择控制字; , 为端口C置 置 控制字 控制字。 为端口 置0/置1控制字。 3.2 分别写出完成将 分别写出完成将PC2置1和 PC4置0的控制字。 的控制字。 置 和 置 的控制字 解:05H , 08H 3.3 若8255A控制寄存器的端口地址为 控制寄存器的端口地址为63H,各端口都工作于 控制寄存器的端口地址为 , 方式0, 口和 口和PC7~PC4为输入,B口和 为输入, 口和 口和PC3~PC0为输出, 为输出, 方式 ,A口和 为输入 为输出 请写出初始化程序段。 请写出初始化程序段。 AL , 98H 解: MOV OUT 63H , AL 3.4 8255A的什么引脚完成内部 端口地址选择? 的什么引脚完成内部I/O端口地址选择 的什么引脚完成内部 端口地址选择? 解:A1和A0 和 3.5 在8255A的选通输入操作中用什么信号来置位 的选通输入操作中用什么信号来置位IBF引脚? 引脚? 的选通输入操作中用什么信号来置位 引脚 解:STB 9
2
1.8 当多片8259A级联使用时,对于从8259A,级联信号 当多片 级联使用时,对于从 , 级联使用时 CAS2~CAS0是 是 。 (A) ) A. 输入信号 B. 输出信号 C. 双向信号 D. 中断信号 1.9 当用 8259A中断控制器时,其中断服务程序执行 中断控制器时, 中断控制器时 其中断服务程序执行EOI命令的 命令的 作用是 。 (B) ) A. 屏蔽正在被服务的中断,使其不再发出中断请求 屏蔽正在被服务的中断, B. 清除该中断服务寄存器中的对应位,以允许同级或低级的中 清除该中断服务寄存器中的对应位, 断能被响应 C. 清除该中断请求寄存器中的对应位,以免重复响应该中断。 清除该中断请求寄存器中的对应位,以免重复响应该中断。 D. 判定优先级 1.10 下列 下列8259A的命令字中,必须在正常操作开始前写入的 的命令字中, 的命令字中 是 。 (A) ) A. 初始化命令字 初始化命令字ICW B. 操作命令字 操作命令字OCW C. 初始化命令字 初始化命令字ICW1 3 D. 初始化命令字 初始化命令字ICW3
2.8 8259A管理的 路外部中断向量存放在中断向量表中连续 管理的8路外部中断向量存放在中断向量表中连续 管理的 个字节中。( 的32个字节中。( ) 个字节中。(√) 2.9 8086系统中,软件中断和非屏蔽中断执行两个中断响应 系统中, 系统中 总线周期。 总线周期。 (×) 2.10 在执行某一级的中断服务程序中,如果有较高优先级的 在执行某一级的中断服务程序中, 中断源请求中断,则都要立即响应较高优先级的中断。(×) 中断源请求中断,则都要立即响应较高优先级的中断。(× 。( 2.11 中断屏蔽位为程序员提供了控制中断处理顺序的手段。 中断屏蔽位为程序员提供了控制中断处理顺序的手段。 (√) ) 2.12 8259A可以编程实现某些低优先级中断打断高优先级 可以编程实现某些低优先级中断打断高优先级 中断的工作方式。( 。(√) 中断的工作方式。( ) 2.13 中断向量表是指中断类型编码表。(×) 中断向量表是指中断类型编码表。( 。(× 2.14 8259A的普通全嵌套方式中,各中断源的优先级是固定 全嵌套方式中, 的普通全嵌套方式中 的优先级最高, 的最低。 的,IR0的优先级最高,IR7的最低。 (√) ) 2.15 当中断允许时,CPU在每条指令的最后一个时钟周期检测 当中断允许时,CPU在每条指令的最后一个时钟周期检测 中断请求。 中断请求。 (√) ) 2.16 8086CPU响应外部可屏蔽中断INTR时,在第二个中断响应 8086CPU响应外部可屏蔽中断INTR时 响应外部可屏蔽中断INTR 周期,由数据总线读入外设的中断类型码。 周期,由数据总线读入外设的中断类型码。 (√) ) 7
5
二、判断对错,对的打“√”,错的打“χ” 判断对错,对的打“ ” 错的打“ ”
2.1 80X86的外部硬件中断包括非屏蔽中断(NMI)和可屏蔽 的外部硬件中断包括非屏蔽中断( 的外部硬件中断包括非屏蔽中断 ) 中断( 内部的中断允许标志( ) 中断(INTR)两类,它们都受 )两类,它们都受CPU内部的中断允许标志(IF) 内部的中断允许标志 的控制。( 。(× 的控制。(×) 2.2 任何一种可编程 接口芯片,工作前都必须先向它的控 任何一种可编程I/O接口芯片 接口芯片, 制寄存器写入控制字,以选择所需工作方式和功能。( 。(√) 制寄存器写入控制字,以选择所需工作方式和功能。( ) 2.3 一般情况下,无论外部中断还是 一般情况下,无论外部中断还是CPU内部异常,中断处理 内部异常, 内部异常 完后均返回被中断指令的下一条指令开始执行。( 。(√) 完后均返回被中断指令的下一条指令开始执行。( ) 2.4 对于可屏蔽中断的嵌套处理原则是允许高级中断打断低级 中断,允许同级中断相互打断, 中断,允许同级中断相互打断,而不允许低级中断打断高级 中断。( 。(× 中断。(×) 2.5 CPU响应外设的中断请求时,要把标志寄存器的 和TF 响应外设的中断请求时, 响应外设的中断请求时 要把标志寄存器的IF和 清零。( 。(√) 清零。( ) 2.6 在80X86系统中,所有中断都要执行两个中断响应周期。 系统中, 系统中 所有中断都要执行两个中断响应周期。 )(只有可屏蔽中断才是 只有可屏蔽中断才是) (×)(只有可屏蔽中断才是) 2.7 任何内部软件中断都不受 和TF影响。(×) (单步中 任何内部软件中断都不受IF和 影响。(× 影响。( 断受) 断受) 6
3.6 在8255A的选通输入、输出方式操作中,允许中断请求 的选通输入、 的选通输入 输出方式操作中, 信号何时有效 何时有效? 信号何时有效? 选通输入: STB脚 IBF脚和 INTE位 中断允许控制位) 脚和INTE 解 : 选通输入 : 当 STB 脚 、 IBF 脚和 INTE 位 ( 中断允许控制位 ) 同时为高时INTR被置为高电平有效。选通输出: ACK、 INTR被置为高电平有效 同时为高时 INTR被置为高电平有效。选通输出: 当 ACK、OBF INTE位同时为高时INTR被置为高有效 位同时为高时INTR被置为高有效。 和INTE位同时为高时INTR被置为高有效。 3.7 在8255A的选通输入方式中如何允许中断请求? 的选通输入方式中如何允许中断请求? 的选通输入方式中如何允许中断请求 由软件通过对C口的PC PC4 PC2位置/复位来控制。 解:由软件通过对C口的PC4或PC2位置/复位来控制。置“1” 允许A口或B口中断,否则相应口的中断请求被屏蔽。 时,允许A口或B口中断,否则相应口的中断请求被屏蔽。 3.8 在8255A的选通输出操作中,ACK信号的用途是什么? 的选通输出操作中, 信号的用途是什么? 的选通输出操作中 信号的用途是什么 是标识数据已从端口移出的输出信号。 解:是标识数据已从端口移出的输出信号。 3.9 在8255A的选通输出操作中用什么来清除 的选通输出操作中用什么来清除OBF信号? 信号? 的选通输出操作中用什么来清除 信号 解: ACK 3.10 8255A的选通输入操作中 的选通输入操作中STB信号有什么用途? 信号有什么用途? 的选通输入操作中 信号有什么用途 利用该信号把端口数据锁至锁存器, 解:8255A利用该信号把端口数据锁至锁存器,并使 利用该信号把端口数据锁至锁存器 并使IBF变为 变为 高。
1.11 有三片 有三片8259级联,从片分别接入主片的 级联, 级联 从片分别接入主片的IR2和IR5,则主 和 , 8259的ICW3中的内容为 两片从片8259的ICW3的内 的 中的内容为 ;两片从片 的 的内 容分别为 。 (A, D) ) A. 24H B. 42H C. 00H,01H D. 02H,05H 分析:初始化命令ICW3的功能是设置级联控制方式。对主片, 的功能是设置级联控制方式。 分析:初始化命令 的功能是设置级联控制方式 对主片, 各位对应IR0~IR7的连接情况,此题给定的条件是 的连接情况, 各位对应 的连接情况 此题给定的条件是IR2、IR5接 、 接 有从片,所以控制字为00100100B=24H。对从片,ICW3的高 有从片,所以控制字为 。对从片, 的高 5位为 ,低三位是对应主片 的编码,所以接 位为0,低三位是对应主片IRi的编码 所以接IR2的从片控制 的编码, 位为 的从片控制 字为00000010H=02H,接IR5的从片控制字为 的从片控制字为00000101B=05H 字为 接 的从片控制字为 1.12 当80486工作在实地址方式下时,已知中断类型号为 工作在实地址方式下时, 工作在实地址方式下时 已知中断类型号为14H, 单元中。 则其中断向量存放在存储器的 单元中。 (C) ) A. 00051H~00054H B. 00056H~00059H C. 0000:0050H~0000:0053H D.0000式下时, 一样, 分析:当80486工作在实地址方式下时,和8086一样,中断向 工作在实地址方式下时 一样 量地址=中断类型号 中断类型号*4 量地址 中断类型号