精密单点定位技术的相关理论及其应用
当今和未来精密单点定位技术创新应用
当今和未来精密单点定位技术创新应用摘要:精密单点定位技术是当前研究热点。
本文首先介绍国内外精密单点定位测量发展现状;其次对精密单点定位原理和误差来源进行了分析,然后列举精密单点定位技术在具体领域中应用;最后对未来发展做了展望。
关键词:精密单点定位;误差;具体应用0引言GPS精密单点定位一直是一个热门话题,PPP需用户自己设置地面基准站、单机作业、定位不受作用距离的限制、作业机动灵活、成本低。
PPP一般采用非差观测模型,能同时精确估计测站在ITRF框架下的绝对坐标、接收机钟差以及绝对天顶对流层延迟及其水平梯度、信号传播路径上的电离层延迟等参数,与相对定位的双差模型相比,PPP在广域精密定位、地震监测、水汽反演和电离层监测等方面应用具有突出优势。
因此,PPP在低轨卫星定轨、精密授时、大气科学、地球动力学等诸多方面具有独特的应用价值。
1精密单点定位测量发展早在20世纪70年代初,Anderle首次提出利用固定已知的卫星轨道和多普勒卫星观测值信息来确定单站位置,并将这种定位方式命名为 Precise Point Positioning(PPP)。
Kouba利用消电离层组合模型,加入各种误差改正项,获得厘米级的精密单点定位精度。
JPL的Muellerschoen 等提出全球实时动态精密单点定位技术,利用非差双频载波相位观测值,在经过一段时间初始化后进行单历元实时动态精密单点定位。
实验结果表明,平面位置定位精度为10~20cm。
Colombo使用自主研发的PPP软件IT对动态精密单点定位的精度做了详细分析,该软件使用了卡尔曼滤波和平滑技术,获取了静态厘米级和动态优于10cm的定位精度,收敛时间为30min。
NAVCOM的Hatch提出了利用JPL实时定轨软件RTG实现全球RTK计划,其目标是实现水平方向 10cm定位精度的全球实时动态定位。
国内学者对精密单点定位技术也做了比较深入的研究。
武汉大学的叶世荣深入地探讨了非差参数估计模型、非差数据预处理、精密卫星钟差估计等关键问题,并且研发了GPS定位软件,其单天解算精度为纬度方向优于1cm,经度方向优于2cm,高程方向优于3cm;同时利用精密单点定位技术进行动态单点定位,其初始化时间大约是15min,单历元解算精度在3个方向上均优于20cm,大多数解的精度优于10cm;采用GPS精密星历和实时钟差计算出的实时动态精密单点定位的精度为40cm。
精密单点定位(PPP)技术在实际生产中的应用研究
精密单点定位(PPP)技术在实际生产中的应用研究文章介绍精密单点定位技术的定位原理,结合具体实践,试验分析其可靠性,提出在测量中的具体工程应用方法。
精密单点定位具有传统单点定位的灵活性和相对定位的高精度特点,从而节省了寻找和联测国家等级控制点的大量工作,保证了控制精度,提高了工作效率。
标签:精密单点定位;GPS差分定位;精度1 概述GPS自投入使用以来,其相对定位的定位方法是快速增长,因为第一个代码相对定位RTK和差异的相对定位,GPS相对定位的精度不断提高。
但发展缓慢绝对定位是一个单点定位,PS单点定位是使用传统的G代码伪距观测和测量卫星广播星历的轨道参数和卫星时钟调整的数量。
2 精密单点定位2.1 精密单点定位原理及优势全球定位系统(GPS)的诞生以来,定位技术大致经历了以下几个阶段:静态相对定位,准静态绝对定位,相对定位,动态相对定位和实时动态相对定位(RTK),精密单点定位(PPP)。
在传统的GPS应用程序中,通常使用相对定位的操作模式,消除形式双差观测数据接收机时钟误差、卫星时钟误差的公共和削弱对流层延迟,电离层延迟误差相关性强的影响力达到提高精度的目的。
这种操作方式不考虑复杂的误差模型,计算模型简单、定位精度高的优势[1]。
但也有一些缺点,比如操作需要至少一个接收器在一个已知的现场观察,影响工作效率,增加了运营成本。
此外随着距离的增加,电离层延迟、对流层延迟误差相关性减弱,必须相应地延长时间的观察来达到预期的精度。
精密单点定位(Precise Point Positioning)是一种高精密单点定位技术,它只使用一个双频GPS接收器,结合从IGS站下载精密星历和精密钟差文件,使用观察的伪距和载波相位观测值计算[2],可以在全球任何地方高精度定位静态或动态的基础上。
与传统的单点定位绝对相比,使用精密单点定位(PPP)不是广播星历,但IGS提供了精确的轨道和卫星时钟误差,它的绝对精度比传统的单点定位精度较高。
精密单点定位技术的应用研究
= ‘ — ,Y—n Z—C・ +厶 d md , d , 即频率 的时间积分值为相位变化值任 意时刻的 在单 点定位观测值 的电离层延 迟误差 可 卫星信号和接收机信号的相位可以表示为
度进行较快速的静态定位, 精密单点定位技术 以通过不同频率的信号到达接 收机的时间差来
GS 收 , 用I 提 精密 历 卫星 P接 机 利 G 供的 星 和 s
式 l 离 伪 组 观 ;为 中 为 无电 层 距 合 钡
(一 = ‘ f = ( ( ) )
标框架 即 IR T F框架 系列一致,而不是 常用 的 机钟 差;T为 G S卫星 i d P 的钟 ; 为投影 函 M 由相位 、 钟差 与频率的关系: 相位偏差为频 WG 一 4坐标 系统下的坐标, S8 因此 I S精密星历 数; d为天顶方向对流层延迟;p 分别为两 率抖动的时间积分,而相位的偏差有等 同于钟 G p E、
双双接机观数昙千平 频码收的测据 万要 在 方 数
一 c
u ,惦牛相 日 刀 , ,恨 司 ‘ 。 I lp J厶 ^ j
() () ‘= + (t f ) d
公里乃至全球范围内的任意位置都可以 2 4 —d 级的精度, 进行实时动态定位或 2 4 级的精 -
,
. , …
。 =
成 的 人 另 ,于 些 山 岭 西 地 本 投 。 外对 一 崇 峻 的 部
雠
将1 照 勒 式 开保 第 项 。-l ( 泰 公 展 ,留 一 : . ^ ) 按
\ 一 - ̄l …I x
必 找 方这 产 精 点 一 等… T 2} l l 须 新 法样 生 密 定 ㈨ : 寻 的 ,就 了 单 一一 一 P o ^ 精 6新 一 5 盎 6 75 s 2 佩 8 6
GPS精密单点定位技术 PPP
5.2 I(Identification)诊断一维模型诊断
构造统计量:tk
T 1 CK VK Vk T 1 CK VK k CK 1 2
T CK 0
0 1 0
0
若������������ > ������������ (0,1 ,则表明相应观测值最可能存在异
常 若认为只有观测模型,则用残差向量来诊断
IGS 是对上述加权平均
8
3.1.1 IGS产品基准统一
卫星星历和卫星钟差共同决定PPP的基准, 而非测站点决定。
广播星历坐标(即通过n文件中参数计算) WGS-84 精密星历(SP3文件 获取) ITRF05 ITRF08
SP3文件:
clk文件:
并且,选取一个处理中心的产品,因为各个中心的处理方式和软件有所不同!
IF
4
2、1卫星信号发射时刻计算
在GPS定位计算中,需要计算卫星在信号发射时刻的位 置,根据信号的接收时刻即观测数据的记录时间,通 过迭代方式计算信号的发射时刻。 信号发射时刻ts与信号的接收时刻tr之间有下列关系:
t s tr X s (ts ) X r (tr ) c
取信号传播时间近似值为0.075s,经过迭代,当差值小 于10−7 ������时结束。 Tion _ trop 30 / (3 108 ) 1107 s 计算时忽略大气延迟,因为
[ X , Y , Z , N1 , N 2 ... N n , trop, c R ]
相应的状态噪声矩阵 状态转移矩阵
0 k 0 0
0
2 trop
0
0 1 k / k 1 0 0 2 clock 0
精密单点定位技术方法
精密单点定位技术方法首先是全球定位系统(GPS)。
GPS是一种通过接收地球上多颗卫星发射的信号来计算接收器位置的定位技术。
GPS定位系统由一组发射星位于地球轨道上的人造卫星组成,这些卫星将信号发射到地球上的GPS接收器上。
接收器接收到多颗卫星发射的信号后,可以通过测量信号传播时间和卫星位置信息进行计算,从而确定接收器的位置坐标。
其次是惯性导航系统。
惯性导航系统是一种基于惯性测量单元(IMU)的定位技术。
IMU由加速度计和陀螺仪组成,用于测量运动物体的加速度和角速度。
通过对这些测量值进行积分,可以估计出物体的位置和姿态。
惯性导航系统具有高灵敏度、高精度和不受外部环境影响等优点,广泛应用于飞行器、导弹、船舶等领域。
另外一种常用的定位技术方法是激光测距。
激光测距技术利用激光束的传播时间和光速来计算测量目标和测量器之间的距离。
激光测距仪通过发射激光束,当激光束照射到目标上时,会发生反射并返回到测距仪上。
通过测量发射和返回的激光信号的传播时间,并结合光速,可以计算出目标与测距仪之间的距离。
此外,无线定位技术也是一种常用的精密单点定位技术。
无线定位技术利用无线信号的传播特性和接收器之间的信号强度来计算接收器的位置。
无线定位技术可以利用无线基站、Wi-Fi、蓝牙等无线设备发射的信号来进行定位。
通过对接收到的信号强度进行测量和分析,可以计算出接收器所在位置的坐标。
最后是视觉定位技术。
视觉定位技术是一种利用摄像机或摄像头拍摄目标图像,并通过图像处理和计算机视觉算法来提取特征信息,进而确定目标位置的方法。
视觉定位技术可以通过目标的特征提取和匹配,计算出目标在图像上的位置坐标。
视觉定位技术具有非接触式、实时性强、适用于各种环境等优点,并广泛应用于机器人导航、无人驾驶等领域。
总结而言,精密单点定位技术是通过对目标进行连续观测和测量,从而确定目标位置的技术方法。
GPS、惯性导航系统、激光测距、无线定位技术和视觉定位技术都是常用的精密单点定位技术方法,它们在不同的领域和应用中有着各自的优势和适用性。
PPP(精密单点定位)
1、比较单点定位与高精度GPS双差定位的共异性。
2、全面的介绍了国内外精密单点定位的研究现状。
3、详细的阐述了非差相位精密单点定位的观测模型、随机模型和各种误差改正模型。
关键词:精密单点定位 国内外研究现状 非差相位观测 误差改正模型
第一章、绪论
1.2 IGS
自从二十世纪九十年代以来,GPS一直在地学研究领域尤其是在大地测量领域扮演着一个举足轻重的角色。为了加强国际间GPS地学研究合作应用,IAG于1993年成立了IGS组织,于1994年1月正式运作。
IGS组织主要由全球跟踪站网、数据中心、分析中心和协作分析中心、协调分析中心、中心局及发布中心等几部分组成:
下面是差分相位定位的解算流程:
相反的,非差定位模式能利用所有的观测值信息,人们也经常利用非差定位模型进行定位。另外,在某些应用中,如时间传递、精密单点定位等,要求确定卫星钟差或接收机钟差,由于双差相对定位方法在其观测方程中已消除了这些参数项,无法确定这些参数,这时必须采用非差定位方法。非差定位与双差定位相比,具有如下技术难点:
90年代中期,随着IGS向全球提供精密星历和精密卫星种差产品,之后,还根据精度等级不同的事后、快速和预报三类精密星历和相应的15min、5min和30s间隔的精密卫星种差产品,这就为非差相位精密单点定位提供了新的解决思路。(李玮 GPS精密单点定位算法研究与软件实现)
1997年,美国JPL(Jet Propulsion Laboratory,喷气推进实验室 )的Zumbeger等提出精密单点定位方法,研制了采用平方根滤波估计方法的非差定轨、定位软件GIPSY。利用GIPSY软件和IGS精密星历,同时利用一个GPS跟踪网的数据确定5s间隔的卫星钟差,利用单台双频GPS接收机采集的非差相位数据,进行精密单点定位。其单天解的精度,在水平方向上 ,高程方向上 ,事后单历元动态定位精度达到2.3~3.5dm的实验结果。(Zumberge JF, HeflinMB, Jefferson DC, et al.Precise point positioning for the efficient and robust analysis of GPS data from large networks[J].Journal of Geophysical Research.B,Solid Earth,1997)
精密单点定位技术原理(张小红)
To ensure GLONASS minimum operational capability (constellation of 18 NSV) by the end of 2007 To ensure GLONASS full operational capability (constellation of 24 NSV) by the end of 2009 To ensure GLONASS performance comparable with that of GPS and GALILEO by 2010
9c49处定a1据s76543210数与pmerusmr用g应sp2g3gps定位技术的发展历程第四代定位技术x第四代非差相位精密单点定位非差相位精密单点定位网络rtk技术第三代网络rtk技术第三代pppppp第二代第二代常规rtk常规rtk广域差分定位广域差分定位第一代第一代伪距单点定位载波静态相对定位伪距差分定位伪距单点定位载波静态相对定位伪距差分定位相对定位绝对定位相对定位绝对定位gps应用与数据处理培训班主讲
Master Control Station Monitor Station Ground Antenna
sites have co-located: • VLBI (very long baseline interferometry); • lunar laser-ranging (from instrument left by Apollo astronauts) …primarily for length of day considerations • satellite laser-ranging 《GPS应用与数据处理》培训班 主讲:张小红
《GPS应用与数据处理》培训班
GPS精密单点定位技术初探
GPS精密单点定位技术初探摘要:本文简单介绍了GPS精密单点定位的技术原理、定位精度及应用情况,同时对精密单点定位(PPP)和RTK的各项技术参数进行了初步的对比分析。
关键词:GPS;精密单点定位;原理;精度1 引言GPS自投入使用以来,其相对定位方式的研究发展迅速,从最先的码相对定位到现在的RTK,使GPS的定位精度不断升高;而绝对定位(即单点定位)的发展则相对缓慢。
随着我国海洋战略的实施、区域或全球性的科学考察等活动日益增加,对定位的精度也提出了新的要求,往往要求达到十几或几十厘米的定位精度。
采用伪距差分定位只能提供米级的定位精度;使用RTK技术,作用距离又达不到;对于这部分定位需求,则需要寻求一种新的定位方式或技术。
2 精密单点定位技术2.1 精密单点定位的思路精密单点定位(Precise Point Positioning,PPP)技术由美国喷气推进实验室(JPL) 的Zumberge于1997年提出。
该技术的思路非常简单,在GPS定位中,主要的误差来源于三类,即轨道误差、卫星钟差和电离层延时。
如果采用双频接收机,可以利用LC相位组合,来消除电离层延时的影响。
只要给定卫星的轨道和精密钟差,采用精密的观测模型,就能像伪距一样,单站计算出接收机的精确位置、模糊度以及对流层延时参数。
2.2 PPP的误差改正有别于双差定位模式,非差观测模型是描述非差观测值与其它物理影响因素的函数关系,因此需要精确估计3类误差源的影响:①与测站相关;②与卫星相关;③与信号传播路径相关。
2.2.1 与测站相关的误差改正①接收机钟差。
以接收机钟差及其变化量作为待定参数,并认为各历元之间是相互独立的,看成一种白噪声,和测站位置、速度一起进行估计计算。
②地球固体潮改正。
地球固体潮改正由和纬度相关的长期项与周期项组成。
PPP利用单天解消除周期性误差后的残差影响在水平方向可达5cm,在垂直方向可达12cm,还需利用模型加以改正。
静态精密单点定位解算
静态精密单点定位解算静态精密单点定位解算是一种高精度的测量方法,它可以用于测量地球上任意一点的位置坐标。
这种方法的精度非常高,可以达到亚厘米级别,因此在地球物理、地质勘探、地形测量等领域得到了广泛的应用。
一、原理静态精密单点定位解算的原理是利用卫星信号进行测量。
GPS系统是一种全球卫星定位系统,它由一组卫星、地面控制站和用户接收机组成。
卫星发射的信号可以被接收机接收,并通过计算得到接收机的位置坐标。
二、步骤静态精密单点定位解算的步骤主要包括以下几个方面:1. 数据采集:在测量前需要进行数据采集,包括卫星信号的接收和记录。
2. 数据处理:将采集到的数据进行处理,包括数据的预处理、数据的质量控制和数据的分析。
3. 解算计算:根据处理后的数据进行解算计算,得到测量点的位置坐标。
4. 结果分析:对解算结果进行分析,包括误差分析和精度评估。
三、应用静态精密单点定位解算在地球物理、地质勘探、地形测量等领域得到了广泛的应用。
在地球物理领域,它可以用于地震监测、地质灾害预警等方面;在地质勘探领域,它可以用于矿产资源勘探、地质构造研究等方面;在地形测量领域,它可以用于地形图制作、地形变化监测等方面。
四、优势静态精密单点定位解算具有以下优势:1. 精度高:可以达到亚厘米级别的精度。
2. 适用范围广:可以用于测量地球上任意一点的位置坐标。
3. 数据处理简单:数据处理过程相对简单,可以快速得到测量结果。
4. 成本低:相对于其他高精度测量方法,成本较低。
五、总结静态精密单点定位解算是一种高精度的测量方法,具有精度高、适用范围广、数据处理简单、成本低等优势。
在地球物理、地质勘探、地形测量等领域得到了广泛的应用。
随着技术的不断发展,静态精密单点定位解算的应用前景将会更加广阔。
基于单频GPS精密单点定位算法研究
基于单频GPS精密单点定位算法研究
GPS(全球定位系统)是一种使用卫星信号来确定地球上位置的技术。
单频GPS是指使用单一频率来接收卫星信号,并进行精密单点定位的方法。
本文将围绕单频GPS精密单点定位算法展开研究。
单频GPS定位算法的核心思想是通过接收卫星发射的导航信号,并利
用卫星时钟和接收器时钟的差异,计算出接收器的位置信息。
这种定位方
法在农业、测绘、航空、海洋等众多领域具有广泛的应用。
其次是观测数据处理方法。
单频GPS接收器会收集到卫星的导航信号,并将其转化为接收器时钟的测量值。
通过计算卫星位置和接收器位置之间
的差异,并考虑误差修正项,可以得到接收器的精确位置。
接着是精密单点定位算法的实现。
常用的算法有最小二乘法、迭代法
和Kalman滤波算法等。
最小二乘法是通过最小化观测值和估计值之间的
误差平方和,来求解位置解的方法。
迭代法则是通过多次迭代计算,不断
优化解的精度。
Kalman滤波算法通过对系统动力学和观测模型的建模,
实现对位置解的优化。
此外,还需要考虑数据处理的时间效率和计算资源的要求。
由于单频GPS定位算法需要处理大量的观测数据,并进行复杂的计算,因此需要高
效的算法和硬件支持。
最后需要考虑定位算法的精度评估和验证方法。
通过与其他定位方法
进行对比,比如双频GPS定位算法或者综合导航系统,可以评估单频GPS
定位算法的精度和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-3-
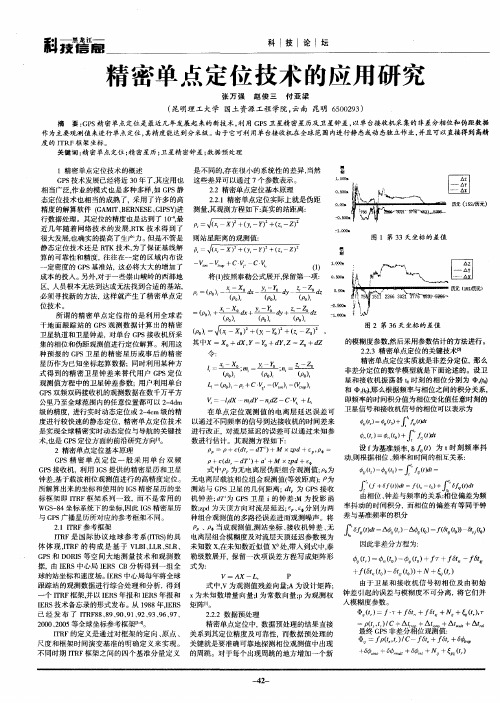
图1 利用不同类型的卫星星历和钟差进行定位时,在X方向的偏差比较
图2利用不同类型的卫星星历和钟差进行定位时,在Y方向的偏差比较
5. 精密单点定位技术的相关应用
随着精密单点定位技术发展,其应用越来越广泛。其应用主要有几个方面。
5.1 精密单点定位技术在大地测量中的应用
精密单点定位在大地测量中的应用将会逐渐普及,特别是在海上及山区。有图1可看出, 精密单点定位按不同的GPS卫星和钟差其解算结果相差不大,定位精度可达到厘米级。
5.2 精密单点定位技术可以用来监测地球引力异常
GPS卫星轨道高度为20180km,CHAMP卫星是GFZ发射的一颗地球物理,其轨道高 度 为 300-500km 。 CHAMP 是 地 球 物 理 研 究 和 应 用 挑 战 微 型 卫 星 负 荷 (Challenging microsatellite payload for geophysical research and application)的缩写。它除了安装2种磁测仪 器外,还装有新一代的星载GPS接收机,用轨道摄动的数据推算引力异常,用一颗高空卫星 来跟踪低轨卫星来导出地球引力异常。
1. 精密单点定位技术的原理
精密单点定位技术(PPP-Precise Point Positioning)由美国喷气推进实验室( JPL ) 的Zumberge于1997年提出。20世纪90年代末,由于全球GPS跟踪站的数量急剧上升,全球GPS 数据处理工作量不断增加,计算时间呈指数上升[2]。为了解决这个问题,作为国际GPS服务组 织( IGS)的一个数据分析中心, JPL提出了这一方法,用于非核心GPS站的数据处理。该技术的 思路非常简单,在GPS定位中,主要的误差来源于三类,即轨道误差、卫星钟差和电离层延时。 利用IGS提供的高精度的GPS精密卫星星历和卫星钟差,以及单台双频GPS接收机采集的载 波相位观测值,采用非差模型进行精密单点定位。精密单点定位的优点在于在进行精密单点 定位时,除能解算出测站坐标,同时解算出接收机钟差、卫星钟差、电离层和对流层延迟改 正信息等参数,这些结果可以满足不同层次用户的需要(如研究授时、电离层、接收机钟差、 卫星钟差及地球自转等)。
P(Li) = ρ + c(dt − dT ) + dorb + dtrop + dion/ Li + dmult / P(Li) + ε (P(Li))
⑴
Φ(Li) = ρ + c(dt − dT ) + dorb + dtrop − dion/ Li + λi Ni + λi (φr (t0 , Li) − φs (t0 , Li)) + dmult /Φ(Li) + ε (Φ(Li))
-2-
宽巷观测值的波长长达86cm,因此很容易准确确定其整周模糊度。但由于测量噪声大。 宽巷观测值一般并不用于最终定位,而是将其作为一种中间过程来确定L1和L2的整周模糊 度。
从以上四式[3]来看,利用以上线性组合可以有效地消除电离层、对流层及周跳 的影响。所以在精密单点定位 时,一般要用多种线性组合才能消除误差的影响,获得高精 度坐标值。
The Theory and Application related to Single precision positioning technology
Lu Xiandong, Qi Jianwei
School of Environment and Spatial Informatics of Chinese University of Mining and technology, Xuzhou, Jiangsu (221008)
差和周跳,否则,认为存在粗差和周跳;当存在粗差和周跳时,继续判别下一个历元的宽巷
模糊度,如果下一个连续历元的宽巷模糊度在一周内,则认为前一个历元存在周跳,否则,
则认为前一个历元存在粗差;发生周跳后,重新设置宽巷偏差的先验值。
4.2 精密单点定位的解算策略
在解算时,位置参数在静态情况下可以作为常未知数处理;在未发生周跳或修复周跳的情 况下,整周未知数当作常数处理;在发生周跳的情况下,整周未知数当作一个新的常数参数进 行处理由于接收机钟较不稳定,且存在着明显的随机抖动,因此将接收机钟差参数当作白噪声 处理;而对流层影响变化较为平缓,可以先利用数学模型改正,再利用随机游走的方法估计其 残余影响。多个历元数据可以采用序贯最小二乘法或卡尔曼滤波法解算。按以上解算方法, 我们试验使用不同类型的卫星星历和钟差进行定位,利用软件解算的X和Y方向的较差如下:
4. 观测数据处理
4.1 观测数据的预处理
在精密单点定位中,必须首先进行周跳探测与修复、粗差剔除、初始整周模糊度的确
定、相位平滑伪距等数据预处理工作,以得到“干净”的非差相位观测值和较精确的伪距观测
值。数据预处理工作的好坏将直接关系到精密单点定位的平差处理和解算结果的质量。 在
观测数据的预处理时,我们一般采用TurboEdit算法。对于宽巷组合,假定先验的宽巷偏差
L4 = L1 − L2
⑷
这种组合称为无几何关系组合,意思是这种组合不受几何关系(卫星轨道和测站坐标)
的影响。也不受接收机钟和卫星钟的影响。它只包含电离层延迟和初始的相位模糊度。所以
可以用来估计电离层模型。
④ Wide-Lane组合观测值
L5 =
1 f1 −
f2 ( f1L1 −
f2 L2 )
(5)பைடு நூலகம்
+εmIF +ε(ΦIF)
采用IGS精密星历和CODE TEC Maps计算卫星位置和电离层延迟可明显地提高单站定 时和长距离比对的精度和稳定度.国际计量局(BIMP)的时间部采用标准化的GPS共视比对方 法,把世界几十个守时中心的主钟沟通起来,并建立了准确的国际原子时(TAI)和国际协调 世界时(UTC/BIPM)
0. 引言
随着我国海洋战略的实施,海洋科研、海洋开发、海洋工程等海上活动日益增加,对定位 精度的要求也呈现出多样化,如精密的海洋划界、精密海洋工程测量等,要求能够达到十几或 几十厘米的定位精度,而采用伪距差分定位只能提供米级的定位精度,如果使用RTK功能,作 用距离又不能达到;对于这部分定位需求,现有的定位手段无法满足要求,需要寻求新的定位 方式或技术。本位系统的阐述了精密单点定位技术的由来和系统组成,对精密单点定位技术 的原理及误差处理数学模型作以下详细分析。
f1
1 +
f2
(
f1P1
+
f2P2 )
(3)
Melbourne-Wubbena组合观测值是一个L1、L2载波相位以及P1、P2码伪距的组合观测值。
它消除了几何距离、 对流层、电离层等误差影响。组成Melbourne-Wubbena组合观测值用
以剔除粗差,探测和修复周跳。
③ Geometry-Free组合观测值
6. 总结
精密单点定位技术是发展虽有十来年的时间,由于受GPS政策的影响,定位坐标的延后 确定仍是难以解决的问题。随着GLONASS全球卫星导航系统和伽俐略GNSS系统的逐步建 立,精密单点定位技术的快速定位将得以实现。以精密单点定位为基础的PointRTK技术将 得以实现,PointRTK技术和网络RTK技术将更为先进,无需参考基站,精度将更为均匀。 随着精密单点定位技术的推广应用,越来越多地商业机构介入,未来的GPS定位模式将越来越 多地依赖精密单点定位技术。
精密单点定位技术的相关理论及其应用
陆贤东,齐建伟
中国矿业大学环境与测绘学院,江苏徐州 (221008)
E-mail: luxiandong2006@
摘 要:本文主要从理论上系统阐述了精密单点定位技术的相关理论,对精密单点定位误差 处理数学模型作了详细的分析,展望了精密单点定位技术的发展和应用。 关键词:精密单点定位;IGS;数学模型;误差分析
2. IGS的相关介绍
精密单点定位技术(PPP-Precise Point Positioning)指的是先利用全球若干IGS跟踪 站的GPS观测数据计算出精密卫星轨道参数和卫星钟差,然后在此基础上对单台接收机的载 波相位或伪距数据进行处理,得到一些相关参数,在相关领域进行应用。IGS由GPS卫星跟 踪网、数据中心、分析中心、中央局、工作组。其中工作组包括低轨卫星研究工作组、 GLONASS工作组、电离层工作组、对流层工作组和时频传递工作组。 低轨卫星研究工作 组研究利用IGS全球跟踪网进行低轨卫星(LEO)定轨、掩星技术等方面的研究; GLONASS 工作组综合利用GPS/GLONASS卫星数据,进行大地测量与地球动力学研究;电离层工作组 是发展全球性和区域性的电离层延迟图。对流层工作组是发展全球性和区域性的对流层延迟 图,为气象学服务; 时频传递工作组是利用GPS时间共视技术(GPS Common View)进行高 精度时间比对,维护协调世界时(UTC)。
-1-
3. 精密单点定位数学模型分析
在GPS定位中,GPS卫星是高速运动的卫星,其坐标值随时间在快速变化着。需要实 时地由GPS信号测量出测站至卫星之间的距离,实时地由卫星导航电文结算出卫星的坐标 值,并进行测点的定位。依据测距的原理,其定位原理与方法主要伪距法定位,载波相位测 量定位以及差分GPS定位等。在精密单点定位时由于为单个点定位,所以主要从伪距法和载 波相位两种讨论精密单点定位的数学模型。根据伪距法定位数学模型和载波相位定位数学模 型,再加以考虑多路径效应和噪声影响可推出精密单点定位的数学模型[1]如下:
参考文献
[1]徐绍铨, 张华海, 杨志强, 王泽民. GPS测量原理及应用[M].武汉:武汉大学出版社,2002. 49-61. [2]刘焱雄,周兴华,张卫红,吴永亭.GPS精密单点定位精度分析[J].海洋测绘,2005,25(1):44-46. [3]Zumberge, J E, M B Heflin, e t a1.Precise point positioning for the efficient and robust analysis of GPS data from large networks [ J ]. Journal Geophys, 1997,(3) : 5005~5018. [4]Geoffrey B lewitt, GPS data processing methodology: From Theory to Application [ J ]. GPS for Geodesy, Spring–Verlag, Berlin, 1998,231~270.