精密单点定位技术的相关理论与应用
当今和未来精密单点定位技术创新应用
当今和未来精密单点定位技术创新应用摘要:精密单点定位技术是当前研究热点。
本文首先介绍国内外精密单点定位测量发展现状;其次对精密单点定位原理和误差来源进行了分析,然后列举精密单点定位技术在具体领域中应用;最后对未来发展做了展望。
关键词:精密单点定位;误差;具体应用0引言GPS精密单点定位一直是一个热门话题,PPP需用户自己设置地面基准站、单机作业、定位不受作用距离的限制、作业机动灵活、成本低。
PPP一般采用非差观测模型,能同时精确估计测站在ITRF框架下的绝对坐标、接收机钟差以及绝对天顶对流层延迟及其水平梯度、信号传播路径上的电离层延迟等参数,与相对定位的双差模型相比,PPP在广域精密定位、地震监测、水汽反演和电离层监测等方面应用具有突出优势。
因此,PPP在低轨卫星定轨、精密授时、大气科学、地球动力学等诸多方面具有独特的应用价值。
1精密单点定位测量发展早在20世纪70年代初,Anderle首次提出利用固定已知的卫星轨道和多普勒卫星观测值信息来确定单站位置,并将这种定位方式命名为 Precise Point Positioning(PPP)。
Kouba利用消电离层组合模型,加入各种误差改正项,获得厘米级的精密单点定位精度。
JPL的Muellerschoen 等提出全球实时动态精密单点定位技术,利用非差双频载波相位观测值,在经过一段时间初始化后进行单历元实时动态精密单点定位。
实验结果表明,平面位置定位精度为10~20cm。
Colombo使用自主研发的PPP软件IT对动态精密单点定位的精度做了详细分析,该软件使用了卡尔曼滤波和平滑技术,获取了静态厘米级和动态优于10cm的定位精度,收敛时间为30min。
NAVCOM的Hatch提出了利用JPL实时定轨软件RTG实现全球RTK计划,其目标是实现水平方向 10cm定位精度的全球实时动态定位。
国内学者对精密单点定位技术也做了比较深入的研究。
武汉大学的叶世荣深入地探讨了非差参数估计模型、非差数据预处理、精密卫星钟差估计等关键问题,并且研发了GPS定位软件,其单天解算精度为纬度方向优于1cm,经度方向优于2cm,高程方向优于3cm;同时利用精密单点定位技术进行动态单点定位,其初始化时间大约是15min,单历元解算精度在3个方向上均优于20cm,大多数解的精度优于10cm;采用GPS精密星历和实时钟差计算出的实时动态精密单点定位的精度为40cm。
单点定位

数据预处理阶段首先进行钟跳探测与修复,避免将接收机钟跳引起的观测值跳变误判为周跳,然后联合使用 GF与MW组合探测周跳。使用扩展卡尔曼滤波(EKF)进行参数估计,并通过对验后残差进行分析,采用改进的 IGGIII抗差估计方案进行质量控制。
BDS/GPS PPP试验及结果分析为了评价BDS PPP的定位性能,选取了March 2015Vol.44No.3AGCS : ∥xb.sinomaps.com8个测站2013年DOY264—270共7d的BDS/GPS双系统GNSS观测数据,分别进行静态和动态 PPP试验。试验数据来源于IGS的MGEX(muti-GNSS experiment)观测,所选测站信息如表2所示,CUAA、 CUBB以及CUT1-CUT3均分布在Curtin大学里面,GMSD和NNOR分别位于日本和澳大利亚,REUN站位于南非附近。 作为对比,对各测站同时进行GPS PPP解算,并以其静态单天解作为各测站坐标参考真值。
整体上而言,BDS PPP收敛后的定位精度要略低于GPS。这主要是由于当前BDS的MEO卫星数较少,卫星分布 及定位的几何图形结构比GPS差一些,且轨道和钟差产品精度相对较低,导致其PPP定位精度要略低于GPS,动态 精度的差别更为明显,这是因为静态结果统计是对各时段收敛后最后一个历元的定位偏差计算RMS,而动态结果 统计是从各时段的收敛时刻开始对偏差序列计算RMS。
精密单点定位(PPP)技术在实际生产中的应用研究
精密单点定位(PPP)技术在实际生产中的应用研究文章介绍精密单点定位技术的定位原理,结合具体实践,试验分析其可靠性,提出在测量中的具体工程应用方法。
精密单点定位具有传统单点定位的灵活性和相对定位的高精度特点,从而节省了寻找和联测国家等级控制点的大量工作,保证了控制精度,提高了工作效率。
标签:精密单点定位;GPS差分定位;精度1 概述GPS自投入使用以来,其相对定位的定位方法是快速增长,因为第一个代码相对定位RTK和差异的相对定位,GPS相对定位的精度不断提高。
但发展缓慢绝对定位是一个单点定位,PS单点定位是使用传统的G代码伪距观测和测量卫星广播星历的轨道参数和卫星时钟调整的数量。
2 精密单点定位2.1 精密单点定位原理及优势全球定位系统(GPS)的诞生以来,定位技术大致经历了以下几个阶段:静态相对定位,准静态绝对定位,相对定位,动态相对定位和实时动态相对定位(RTK),精密单点定位(PPP)。
在传统的GPS应用程序中,通常使用相对定位的操作模式,消除形式双差观测数据接收机时钟误差、卫星时钟误差的公共和削弱对流层延迟,电离层延迟误差相关性强的影响力达到提高精度的目的。
这种操作方式不考虑复杂的误差模型,计算模型简单、定位精度高的优势[1]。
但也有一些缺点,比如操作需要至少一个接收器在一个已知的现场观察,影响工作效率,增加了运营成本。
此外随着距离的增加,电离层延迟、对流层延迟误差相关性减弱,必须相应地延长时间的观察来达到预期的精度。
精密单点定位(Precise Point Positioning)是一种高精密单点定位技术,它只使用一个双频GPS接收器,结合从IGS站下载精密星历和精密钟差文件,使用观察的伪距和载波相位观测值计算[2],可以在全球任何地方高精度定位静态或动态的基础上。
与传统的单点定位绝对相比,使用精密单点定位(PPP)不是广播星历,但IGS提供了精确的轨道和卫星时钟误差,它的绝对精度比传统的单点定位精度较高。
精密单点定位技术的相关理论与应用

12
工作组(Working Groups)
3.电离层工作组
目的:发展全球性和区域性的电离层延迟图 目前,CODE和NGS发布格式为IONEX的电离层产品。 IONEX格式示例
LATITUDE BAND COVERED MINIMUM LATITUDE (DEGREES) MAXIMUM LATITUDE (DEGREES) ADDITIONAL INFORMATION NUMBER OF CONTRIBUTING STATIONS NUMBER OF CONTRIBUTING SATELLITES ELEVATION CUT-OFF ANGLE (DEGREES) MAXIMUM TEC AND ITS RMS ERROR (TECU) COMMENT / WARNING COEFFICIENTS DEGREE ORDER VALUE (TECU) RMS (TECU) 0 0 12.96054650 0.0340 1 0 -2.68840669 0.0312 1 1 5.01878198 0.0344 1 -1 3.30707632 0.0313 2 0 -3.71365092 0.0321 2 1 -0.68308873 0.0313 2 -1 -0.38465300 0.0293 2 2 1.73454196 0.0329 : : -89.59 89.04
IGS共有7个分析中心:
CODE: 瑞士伯尔尼大学的欧洲定轨中心 (http://www.aiub.unibe.ch) NRCan:加拿大自然资源部的大地资源分局 GFZ: ESA: 德国地学中心 (http://www.gfz-postdam.de) 欧洲空间工作中心(http://nng.esoc.esa.de)
中央局()
精密单点定位技术的应用研究
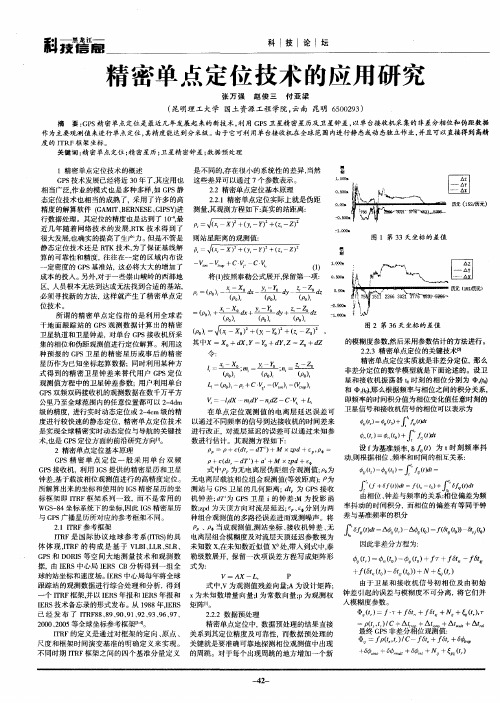
= ‘ — ,Y—n Z—C・ +厶 d md , d , 即频率 的时间积分值为相位变化值任 意时刻的 在单 点定位观测值 的电离层延 迟误差 可 卫星信号和接收机信号的相位可以表示为
度进行较快速的静态定位, 精密单点定位技术 以通过不同频率的信号到达接 收机的时间差来
GS 收 , 用I 提 精密 历 卫星 P接 机 利 G 供的 星 和 s
式 l 离 伪 组 观 ;为 中 为 无电 层 距 合 钡
(一 = ‘ f = ( ( ) )
标框架 即 IR T F框架 系列一致,而不是 常用 的 机钟 差;T为 G S卫星 i d P 的钟 ; 为投影 函 M 由相位 、 钟差 与频率的关系: 相位偏差为频 WG 一 4坐标 系统下的坐标, S8 因此 I S精密星历 数; d为天顶方向对流层延迟;p 分别为两 率抖动的时间积分,而相位的偏差有等 同于钟 G p E、
双双接机观数昙千平 频码收的测据 万要 在 方 数
一 c
u ,惦牛相 日 刀 , ,恨 司 ‘ 。 I lp J厶 ^ j
() () ‘= + (t f ) d
公里乃至全球范围内的任意位置都可以 2 4 —d 级的精度, 进行实时动态定位或 2 4 级的精 -
,
. , …
。 =
成 的 人 另 ,于 些 山 岭 西 地 本 投 。 外对 一 崇 峻 的 部
雠
将1 照 勒 式 开保 第 项 。-l ( 泰 公 展 ,留 一 : . ^ ) 按
\ 一 - ̄l …I x
必 找 方这 产 精 点 一 等… T 2} l l 须 新 法样 生 密 定 ㈨ : 寻 的 ,就 了 单 一一 一 P o ^ 精 6新 一 5 盎 6 75 s 2 佩 8 6
GPS精密单点定位(PPP)技术精度分析研究
GPS精密单点定位(PPP)技术精度分析研究介绍了精密单点定位技术的定位原理,分析了对其定位精度影响的误差源,应用TriP(1.0)软件对IGS观测站进行数据处理,得出了其定位精度可靠性。
标签:精密单点定位(PPP)原理分析精度可靠性分析1绪论精密单点定位(Precise Point Positioning,PPP)技术由美国喷气推进实验室(JPL)的Zumberge 于1997年提出。
该技术的思路非常简单,在GPS定位中,主要的误差来源于三类,即轨道误差、卫星钟差和电离层延时。
如果采用双频接收机,可以利用LC相位组合,消除电离层延时的影响。
如果选择地心地固系表示卫星轨道,计算的参考框架同为地心地固系,可以消去观测方程中的地球自转参数。
本文应用武汉大学研制的TriP(1.0)软件,通过对IGS提供的GPS 原始观测数据进行数据处理,解算出时间系列,通过对其进行分析,得出了其定位的精度可靠性。
2精密单点定位技术的定位原理精密单点定位技术(PPP)利用全球若干地面跟踪站的GPS 观测数据计算出的精密卫星轨道和卫星钟差,对单台GPS 接收机所采集的相位和伪距观测值进行定位解算。
利用这种预报的GPS 卫星的精密星历或事后的精密星历作为已知坐标起算数据;同时利用某种方式得到的精密卫星钟差来替代用户GPS 定位观测值方程中的卫星钟差参数。
在精密单点定位中,一般是利用IGS的精密卫星钟差估计值消去卫星钟差项,并且采用双频观测值消除电离层影响,其观测值误差方程如下:式中:A为相应的设计矩阵,L(i)为相应的观测值减去概略理论计算值得到的常数项,X(i)为待估计参数,其中x、y、z为三维位置参数,δt 为接收机钟差参数、δρzd为对流层延迟参数、Nj为整周未知数参数。
利用上述推导的观测模型,即可采用卡尔曼滤波的方法或最小二乘法进行非差精密单点定位计算,在解算时,位置参数在静态情况下可以作为常未知数处理;在发生周跳的情况下,整周未知数当作一个新的常数参数进行处理;对流层影响选用Saastamonen 或其他模型改正,再利用随机游走的方法估计其残余影响。
BDSGNSS实时精密单点定位算法研究与实现
BDS/GNSS实时精密单点定位算法研究与实现随着GNSS定位技术的不断发展,以及多导航定位系统并存时代的到来,多系统融合精密单点定位逐渐成为研究的重要问题。
实时精密单点定位技术具有定位精度高、定位方便、不受基准站限制等优点,将成为未来高精度导航定位的重要手段。
多系统提供了更多的可见卫星数量及更优的卫星几何结构,有利于提高实时精密单点定位的定位的精度、可靠性及收敛时间。
因此,本文通过对实时多系统精密单点定位的理论和方法进行研究,基于实时的轨道和钟差数据流,以及实时的多系统观测数据流,实现了支持GPS/BDS/GLONASS三系统组合定位的实时单频和双频精密单点定位。
本文的主要研究内容如下:(1)本文对伪距粗差的探测、钟跳的探测与修复方法、以及周跳探测的方法进行了详细的分析。
首先对利用不同伪距间的差值进行伪距粗差探测的有效性进行了分析;然后根据不同的钟跳类型,对基于单个历元观测值的钟跳探测和修复方法进行了分析;最后,根据三频组合观测值的理论,优选了GPS和BDS三频无几何距离周跳探测组合,并根据实例,分析了利用优选的两组BDS线性组合系数进行无几何距离周跳探测的有效性。
(2)本文对不同系统和不同测站系统偏差值的特性进行了分析。
结果表明:系统偏差收敛后的值在一天内保持相对稳定,且系统偏差值的大小表现出与测站相关的特性。
(3)本文利用德国联邦测绘局提供的实时SSR改正数,分析了三系统实时恢复的轨道和钟差的精度。
同时分析了数据龄期和改正数中断对实时精密单点定位的影响,并给出相应的解决方案。
(4)根据实时多系统精密单点定位的理论,基于C++平台,编程实现了支持GPS/BDS/GLONASS三系统组合定位的实时单频和双频精密单点定位。
并进行了双频静态模拟动态、单频静态模拟动态、车载动态试验,分析了软件的定位性能。
GPS精密单点定位原理及应用
对于传统的伪距单点定位而言, 大气层延迟、 轨道误差 和钟差等误差都大大降低了定位精度, 只能适用于普通的导 航定位以及一些低精度作业 。 而近年来随着载波相位静态 RTK ) 以 定位、 常规实时动态差分定位( Real Time Kinematic, 及网络 RTK 的逐步实现, 相对定位的技术有了长足的发展 。 但是相对定位技术也有着显著的缺点, 需要架设基站、 作业 半径有限、 野外无网络 RTK 信号覆盖, 这都给油气田及管道 工程的测量工作加大难度 。在油气田及管道测量工作中, 根 据不同需求往往要求达到十几厘米甚至几厘米的定位精度 。 伪距单点定位的定位精度已经无法满足要求, 而相对定位又 有着难以忽视的局限性 。随着 GPS 精密单点定位的发展, 简 单可靠的单点定位测量模式应运而生 。 一、 精密单点定位的原理及数学模型 PPP ) 最早 精密单点定位技术 ( Precise Point Positioning, 由美国喷气推进实验室( JPL) 的 Zum berge 年提出, 当时这一 非差定位技术采用 JPL 自行研发的 GIPSY 软件可达到亚米 级精度。随着精密星历和钟差成果精度的提高以及对流层 延迟和电离层延迟改正模型的完善, 单点定位的精度也有了 显著提高。其观测方程如下: P IF = ρ - cdT + d trop + d ino, i + ε PIF IF = ρ - cdT + d trop + cf1 N1 - cf2 N2 + d ino, i + ε IF f1 2 - f2 2
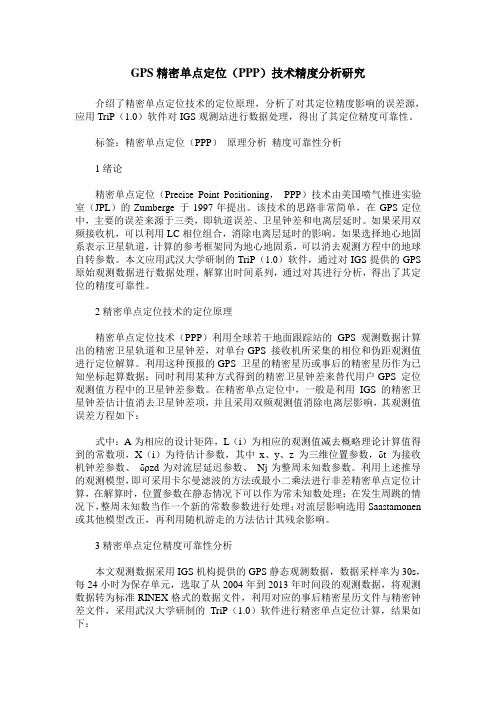
表2
星历 / 钟差 精度( cm / ns) 滞后时间 更新率 采样间隔 星历 广播 钟差 超快速 ( 预测) 超快速 ( 观测) 星历 钟差 星历 钟差 星历 快速 钟差 星历 最终 钟差 < 0. 1 0. 1 <5 13 天 1 次 /周 5 分钟 7 10 实时 5 <5 3 小时 0. 2 4 次 / 天 15 分钟 4 次 / 天 15 分钟 160 实时 — 1天 点号
精密单点定位技术及在工程中的应用概要
GNSS 精密单点定位技术及在工程中的应用常君锋1 庞尚益2(1 中国有色金属工业西安勘察设计研究院 2 国家测绘局大地测量数据处理中心西安710054 西安710054)摘要:详细介绍了GNSS 精密单点定位技术及在工程中的应用情况,供同行们参考。
关键词:GNSS;精密单点定位;控制测量。
0 工程概括中缅油气管道是我国能源进口的西南大通道,由原油和天然气两条管道组成。
工程起自缅甸西海岸的皎漂,从云南省瑞丽市入境,经潞西、龙陵、保山、大理、楚雄、禄丰、曲靖,在贵州安顺油气管道分离,原油管道到达重庆,天然气管道到达广西贵港。
中国有色金属工业西安勘察设计研究院参加中缅油气管道工程云南段隧道、河流穿越测量项目。
本次测量任务的主要目的是为中缅油气管道工程云南段隧道、河流穿越阶段设计提供基础测量资料。
坐标系采用1980西安坐标系,按6°分带。
高程系采用1985国家高程基准。
该项目在云南段长度约1206 Km,共有隧道39座,河流穿越10处,工点间间隔最短距离为26米,最长距离为92.5千米。
由于工点较为分散,坐标高程系统要求采用1980西安坐标系和1985国家高程基准,势必要在每工点处联测国家平面控制点及高程控制点,由于工期要求紧,按照常规控制测量方法无法满足工期要求,本工程采用近年发展起来的先进的GNSS 精密单点技术,较好的完成了本次测量任务。
1 GNSS定义GNSS 是Global Navigation Satellite System的缩写。
中文译名为:全球导航卫星系统。
20世纪90年代中期,国际民航组织、国际移动卫星组织以及欧洲空间局等倡导发展完全由民间控制的全球导航卫星系统,该系统将由多卫星导航系统组成。
1992年5月,在国际民航组织(ICAO)未来空中导航系统(FANS)会议上,全球导航卫星系统(GNSS)被定义为:它是一个全球性的位置和时间测定系统,包括一种或几种卫星星座、机载接收机和系统完备性监视。
精密单点定位技术在IMU/GPS辅助航空测量中的应用研究
精密单点定位技术在IMU/GPS辅助航空测量中的应用研究[摘要] 简单的介绍精密单点定位(PPP)和IMU/GPS辅助航空测量技术,并进行了利用精密单点定位技术进行IMU/GPS系统数据处理试验。
分析了精密单点定位技术的定位精度,IMU/PPP联合处理的精度,对结果进行了分析,总结了采用精密单点定位技术进行IMU/GPS辅助航空摄影测量的作业流程、精度情况和相对于常规IMU/DGPS辅助航空摄影测量作业的优点,为IMU/GPS辅助航空测量时外业地面工作提出一种新方案。
[关键词] 精密单点定位技术(PPP)IMU/GPS辅助航空测量精度分析1.引言目前IMU/GPS辅助航空摄影测量技术中,GPS的数据处理主要采用差分GPS(DGPS)方法。
DGPS技术不需要考虑复杂的误差模型,解算模型简单、待估参数少、定位精度高,因此被广泛应用在IMU/GPS辅助航空摄影中。
其不足之处在于:作业时至少一台接收机置于基准站上进行连续观测,不仅影响了作业效率,还增加人力、物力和财力的投入;随着用户与基站距离的增加,对流层延迟、电离层延迟等误差的相关性减弱,其精度降低。
随着IGS精密星历和精密钟差精度的不断提高,近些年发展起来的精密单点定位PPP(Precise Point Positioning)技术已成为GPS的一个热点。
精密单点定位实现了用户仅使用单台GPS接收机就可以精确确定点位位置,采用该技术可改变传统的GPS静态相对定位作业模式,大大的提高工作效率。
随着接收机性能的不断改善,载波相位精度不断提高,以及大气改正模型和改正方法不断深入,精密单点定位技术的出现,为IMU/GPS辅助航空摄影提供了新的解决方案。
笔者对精密单点定位技术在IMU/GPS辅助航空测量中的应用进行了大量的研究。
通过试验表明,该方法简单高效、精度可靠,无需架设地面基站,作业时不受距离限制,可以大量的节约成本;能够很好的解决IMU/GPS辅助航空摄影作业时费时费力布设地面基站工作这一问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12
工作组(Working Groups)
3.电离层工作组
目的:发展全球性和区域性的电离层延迟图 目前,CODE和NGS发布格式为IONEX的电离层产品。 IONEX格式示例
LATITUDE BAND COVERED MINIMUM LATITUDE (DEGREES) MAXIMUM LATITUDE (DEGREES) ADDITIONAL INFORMATION NUMBER OF CONTRIBUTING STATIONS NUMBER OF CONTRIBUTING SATELLITES ELEVATION CUT-OFF ANGLE (DEGREES) MAXIMUM TEC AND ITS RMS ERROR (TECU) COMMENT / WARNING COEFFICIENTS DEGREE ORDER VALUE (TECU) RMS (TECU) 0 0 12.96054650 0.0340 1 0 -2.68840669 0.0312 1 1 5.01878198 0.0344 1 -1 3.30707632 0.0313 2 0 -3.71365092 0.0321 2 1 -0.68308873 0.0313 2 -1 -0.38465300 0.0293 2 2 1.73454196 0.0329 : : -89.59 89.04
管理委员会负责监督管理IGS的各项工作,确定IGS的未来 方向。
11
工作组(Working Groups)
1.低轨卫星研究工作组 研究目的:研究利用IGS全球跟踪网进行低轨卫星(LEO)定轨、 掩星技术等方面的研究。 提供高采样率、实时的星载GPS数据。 目前主要研究Oersted,Sunsat,SAC-C,CHAMP,GRACE, GLAS等低轨卫星。 2.GLONASS工作组 研究目的:综合利用GPS/GLONASS卫星数据,进行大地测量 与地球动力学研究。 研究PZ90到ITRF框架的转换 研究GPS和GLONASS之间的系统时间偏差 通过地面GLONASS地面站和SLR站进行G JPL: SIO: 喷气动力实验室 斯克普斯海洋研究所()
9
中央局和管理委员会(Central Bureau and Internatational Governing Board)
(5)GPS数据流的描述;
10
中央局和管理委员会(Central Bureau and Internatational Governing Board)
(6)最新数据与成果利用率图表; (7)GPS系统现状; (8)IGS邮件与报告文件; (9)通用软件(适用于各种平台和UNIX兼容的压缩/解压缩程); (10)IGS联合轨道成果文件。
7
IGS分析中心(Analysis Centers)
分析中心每天的基本任务是从全球数据中心获取GPS跟踪 站数据,独立进行计算以生成GPS卫星星历、地球自转参数 、卫星钟差、跟踪站的站坐标、站坐标的速率、跟踪站对流 层天顶延迟以及接收机钟差等IGS产品。
8
IGS分析中心(Analysis Centers)
精密单点定位技术的相关理 论与应用
主要内容
1 IGS的相关介绍
2
精密单点定位的相关原理
3
精密单点定位技术的应用
2
1、IGS介绍
精密单点定位技术(PPP-Precise Point Positioning) 指的是先利用全球若干IGS 跟踪站的GPS观测数据计算
出精密卫星轨道参数和卫星
钟差,然后在此基础上对单 台接收机的载波相位或伪距数 据进行处理,得到一些相关参数,在相关领域进行应用。
中央局()
主要负责IGS日常工作,包括组织会议,制定标准及出 版相关出版物等,由中央局维护的中央局信息系统CBIS包 括下面内容: (1)IGS机构与运行情况;
(2)全球GPS跟踪网站;
(3)GPS接收机和天线的全部说明; (4)IGS数据中心的数据收集信息和存储资料总览;
IGS共有7个分析中心:
CODE: 瑞士伯尔尼大学的欧洲定轨中心 (http://www.aiub.unibe.ch) NRCan:加拿大自然资源部的大地资源分局 GFZ: ESA: 德国地学中心 (http://www.gfz-postdam.de) 欧洲空间工作中心(http://nng.esoc.esa.de)
4
IGS的全球跟踪网( Network of tracking stations )
5
IGS数据中心(Data Centers)
1.全球数据中心
主要目的:为分析中心及外部用户提供数据服务 包括:CDDIS:Crustal Dynamics Data Information System (数据下载地址:ftp://) SIO:Scripps Institution of Oceanography (数据下载地址:ftp://) IGN:Insititut Geographique National (数据下载地址:ftp://igs.ensg.ign.fr)
6
IGS数据中心(Data Centers)
2.区域数据中心
目的:满足本区域的需求,减少数据传输流量,并将数据传输到全球数据 中心。 包括:BKG:Bundesamt fuer Kartographie und Geodaesie (网址:http://www.ifag.de) AUSLIG:Australian Surveying and Land Information Group (网址:.au) NRCAN:Natural Resources of Canada (网址:http://www.nrcan.gc.ca/inter/inter_e.html) GODC:Geoscience Laborotory,NOAA JPL:Jet Propulsion Laboratory (网址:)
3
IGS组织结构
国际GPS服务(IGS-International
GPS Service)是国际大地测量协会IAG于1993年创 建的一个为GPS服务提供应用服务的国际组织, 该组织于1994年1月正式运作。 IGS由GPS卫星跟踪网、数据中心、分析中心、 工作组、中央局和管理委员会组成。