基于自适应控制方法的电机转速控制
数控机床进给系统的速度调节方法

数控机床进给系统的速度调节方法随着科技的不断进步,数控机床在工业生产中的应用越来越广泛。
作为数控机床的核心部分之一,进给系统在加工过程中起到了至关重要的作用。
速度调节是进给系统中一个关键的技术,它决定了加工的效率和质量。
本文将介绍一些常用的数控机床进给系统的速度调节方法。
一、开环速度控制方法开环速度控制方法是最基本的速度调节方法之一。
它通过根据编程指令设置电机的旋转速度,来控制机床的进给速度。
当采用开环速度控制方法时,系统并不能实时获取到电机的实际速度信息,只能依靠设定的指令值进行控制。
虽然这种方法简单易行,但由于无法准确测量实际速度,容易出现误差累积和运动不稳定的问题。
二、封闭环速度控制方法为了解决开环速度控制方法存在的问题,人们提出了封闭环速度控制方法。
该方法在进给系统中增加了一个速度反馈装置,可以实时监测到电机的实际转速,并与编程指令进行比较,进行误差校正。
这种方法能够更准确地控制机床的进给速度,提高加工精度和稳定性。
然而,封闭环速度控制方法的成本较高,且对装置的精度要求较高,因此在实际应用中需要根据具体情况来选择。
三、前馈速度控制方法前馈速度控制方法是一种相对较为高级的速度调节方法。
它在封闭环速度控制方法的基础上,引入了前馈控制器。
前馈控制器通过分析工件表面的摩擦系数、切削力和惯性等参数,实时调整电机的转速,以实现更加精确和稳定的速度调节。
前馈速度控制方法能够有效避免由于惯性力和切削力变化而导致的速度波动,提高了机床的加工稳定性和效率。
四、自适应速度控制方法自适应速度控制方法是一种更为智能和高级的速度调节方法。
它通过模糊控制、神经网络或遗传算法等方法,实时根据机床运行状态和切削情况来自动调整速度控制参数,以实现最佳的加工效果。
自适应速度控制方法能够自动适应不同的工况和切削条件,提高了机床的加工稳定性和适应性。
然而,由于自适应速度控制方法的复杂性增加了控制系统的设计和实现难度,因此在实际应用中需要考虑成本和可行性。
异步电机参数辨识与自适应控制策略研究

关键词:异步电机参数辨识 RLS 算法,交直流离线辨识,矢量控制,扩展卡尔曼滤波
I
北方工业大学硕士学位论文
Parameter Identification of Asynchronous Motor and Adaptive Control Strategy Research Abstract
With the development of field orientation technique, the vector control technology of AC transmission can basically reach to the same level at dynamic and static performance of the DC transmission. Whereas, the vector control of asynchronous motor requires precise observation of rotor flux in order to achieve the oriented control of stator current and rotor field, and accurate motor parameters are the base. Motor parameters are susceptible to temperature, magnetic saturation and skin effect in the operating process of the motor, which may cause the inaccurate rotor flux observation, so as to affect the vector control. V ector control is first and foremost to estimate rotor flux so that realize the rotor field orientation control. The second is to estimate rotor speed to achieve the speed sensorless vector control. Last but not the least, the parameters of velocity loop, current loop and magnetic link can be self-tuning, thus improving the dynamic and static performance of the system. Many articles have introduced the using of least squares method on parameter identification so far. This article gives the detailed analysis of on-line and off-line motor parameter identification based on the recursion method of least square (RLS) algorithm. Using RLS algorithm on parameter identification can simplify the two-dimensional model, and avoid the two-dimensional matrix inversion operation question to reduce the computation load. Solve the Butterworth digital filtering equation of state with the improved Euler numerical solution, while get the signal filter value and figure out the signal first derivative value and second derivative value in the meantime, which has avoided the influence of derivative discretization error, increased the operation precision. According to the massive simulations and experiments in view of the different power's electrical machinery studies, the experimental result has confirmed its good stability, consistency and accuracy. In the meantime, in this article, using the AC-DC off-line identification algorithm on motor parameter off-line identification are analyzed, turns out this algorithm can reduce the microcontroller operating speed and memory capacity. And it is verified through repeated experiments of different power on asynchronous motor identification that the higher practicality of the method. The article also introduces the extended kalman filter (EKF) algorithm theory and its application in motor adaptive control. Set up a simulation model of the speed sensorless vector control system based on EKF algorithm in Simulink simulation environment, observe and estimate the rotor flux and speed, which have led to good motor control results. In addition, the speed sensorless vector control based on EKF algorithm has good rapidity, stability and accuracy that have been verified by the simulation results.
无刷直流电机自适应调速控制系统的设计
犇犲狊犻犵狀狅犳犅狉狌狊犺犾犲狊狊犇犆 犕狅狋狅狉犃犱犪狆狋犻狏犲犛狆犲犲犱犆狅狀狋狉狅犾犛狔狊狋犲犿
LuJun1,ChengShiqing1,Huang Haibo1,ChenYufeng1,GaoYun2,WangZhihu2
收 稿 日 期 :2018 12 24; 修 回 日 期 :2019 05 28。 基 金 项 目:湖 北 省 中 央 引 导 地 方 科 技 发 展 专 项 (2018ZYYD007),湖 北 省 科 技 支 撑 计 划 项 目(2015BAA049)。 作 者 简 介 :卢 军(1989 ),男 ,安 徽 宿 州 人 ,硕 士 ,讲 师 ,主 要 从 事汽车电子控制技术方向的研究。 黄 海 波(1974 ),男 ,湖 北 十 堰 人 ,博 士 ,教 授 ,主 要 从 事 汽 车 电 子控制技术方向的研究。
为了使得三相直流无刷电机在各控制系统中得到更好 的运用,设 计 生 产 一 款 稳 定 的、控 制 性 能 优 越、成 本 低 廉 的驱动控制器将成为直 流 无 刷 电 机 发 展 的 重 要 需 求[46]。 本 系统设计的是 基 于 SPANSION MB9BF121K 单 片 机 的 三 相 直流无刷电机控制系统,系统采用上位机实现电机转速设
犓犲狔狑狅狉犱狊:DCbrushlessmotor; MB9BF121K;mixedspeed measurement;adaptivespeedcontrol
0 引 言
直流电动机具有运行效率高、调速性能好等诸多优点 而得以广 泛 的 运 用。 但 传 统 的 直 流 电 动 机 大 都 采 用 电 刷, 以机械换相方式进行换相即有刷电机,由于摩擦等物理因 素进而存在噪声、火 花、无 线 电 干 扰 以 及 寿 命 短 等 弱 点 。 [1] 随着半导体行业的飞跃发展发展,借助位置传感器和电子 换 相 线 路 来 替 代 机 械 换 相 的 直 流 无 刷 电 机 应 运 而 生 [2 3]。
基于模糊自适应控制的无轴承异步电动机SVM-DTC运行控制

tr u ,f x a d Roo ipa e n h n c mp e i h r dt n D t o . A d i as mp o e h y tm o q e l n trd s lc me tw e o a d w t t e ta i o TC meh d u r h i n t lo i r v s te s se
W i e f zy ag rt m ,i i a y t b an t e c nr lv l g o o e to e f x a d tr u e p ci ey T o t t u z l oi h h h t s e s o o ti h o to ot e c mp n n f t u n o q e r s e t l . w a h l v
无 轴承异 步 电动机 作 为 一种 集 驱 动 与悬 浮 功 能于一体的新型磁悬浮电动机¨ , J 由于悬浮控制绕
V c r dli ,V 技 术应用 到 直接转矩 控 制 et uao S M) o Mo tn 中 , 以大 大 减 小转 矩 脉 动 和 得 到 固定 的 开关 频 可
vlg et saheera — ieajs n n o eted trac rbe s ntru o n u o. h e oaevc r ci e t dut t dsl iubnepo l qel padf x opT ed— t o v l m me a v h s m i o o l l
基于FPGA的SpTa自适应电机控制算法
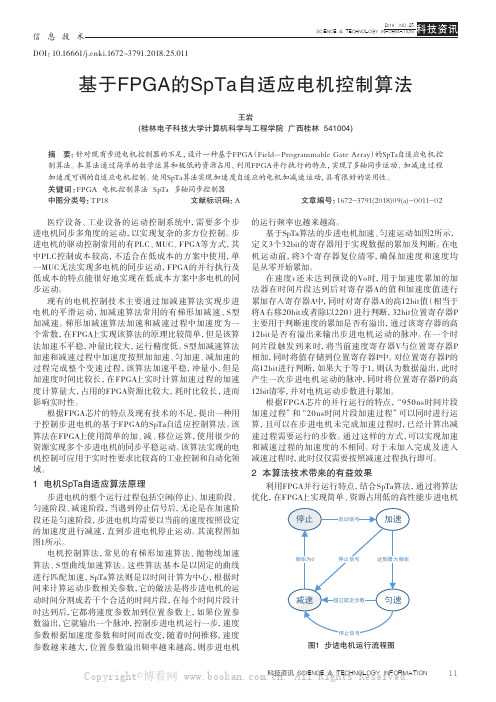
DOI:10.16661/ki.1672-3791.2018.25.011基于FPGA的SpTa自适应电机控制算法王岩(桂林电子科技大学计算机科学与工程学院 广西桂林 541004)摘 要:针对现有步进电机控制器的不足,设计一种基于FPGA(Field-Programmable Gate Array)的SpTa自适应电机控制算法。
本算法通过简单的数学运算和极低的资源占用、利用FPGA并行执行的特点,实现了多轴同步运动、加减速过程加速度可调的自适应电机控制。
使用SpTa算法实现加速度自适应的电机加减速运动,具有很好的实用性。
关键词:FPGA 电机控制算法 SpTa 多轴同步控制器中图分类号:TP18 文献标识码:A 文章编号:1672-3791(2018)09(a)-0011-02医疗设备、工业设备的运动控制系统中,需要多个步进电机同步多角度的运动,以实现复杂的多方位控制。
步进电机的驱动控制常用的有PLC、MUC、FPGA等方式,其中PLC控制成本较高,不适合在低成本的方案中使用,单一MUC无法实现多电机的同步运动,FPGA的并行执行及低成本的特点能很好地实现在低成本方案中多电机的同步运动。
现有的电机控制技术主要通过加减速算法实现步进电机的平滑运动,加减速算法常用的有梯形加减速、S型加减速。
梯形加减速算法加速和减速过程中加速度为一个常数,在FPGA上实现该算法的原理比较简单,但是该算法加速不平稳,冲量比较大,运行精度低。
S型加减速算法加速和减速过程中加速度按照加加速、匀加速、减加速的过程完成整个变速过程,该算法加速平稳,冲量小,但是加速度时间比较长,在FPGA上实时计算加速过程的加速度计算量大,占用的FPGA资源比较大,耗时比较长,进而影响实时性。
根据FPGA芯片的特点及现有技术的不足,提出一种用于控制步进电机的基于FPGA的SpTa自适应控制算法。
该算法在FPGA上使用简单的加、减、移位运算,使用很少的资源实现多个步进电机的同步平稳运动。
一种模型参考自适应速度辨识的异步电机直接转矩控制及其计算机仿真
控 制电动机的磁链和转矩 , 将定子磁通和转矩限定在两个滞
环带里,获得转矩 的高动态性能 。
速度是实现直 接转矩控制的一个重要参量, 而在实 际应 用中, 使用速度传感器既增加了成本, 又降低了系统 的可靠
性, 囚此采用无速度传感器已是未来 交流涮速发展 的必 然趋
,
转子磁链矢量 的 o D 。 【 分量 ;
0 引 言
l R + “ = ‘ 御
直接转矩控制技术 【 简称 D C 是继矢量控制之后又一 2 H T) 高性 能的交流变频 调速 技术 。 异步电机直接转矩控制是在定 子静止坐标系下,以空间矢量概念 , 定子磁链定 向。通过 对 检 测到的定子 电压 、电流等量,直接在 定子坐标系下计算和
【p ‘+ p p 御,
l + 御 一 ,,= ∞ p0 I, + p ∞ m= f 御,+ 0 , D
() 2
其 中 :i 。 ,i B 。 —— 定子电流矢量 i 的 o、 D分量 : 【 ‘ , —定子磁链矢量 的 o、 D分量 : P 。— s 【 i ,i B ——转 子子电流矢 量 i 的 o、 D 。 【 分量 ;
两边微分,可得反 电动势的近似模型为 :
其 中: f ——转子时间常数, f - R : - /
1●● ●, J
甩
1
tr
+
L
—
—
。
电机漏感,L L L L。 = s -
式 ( )称为电压方程,式 ( )成为电流方程。 5 6
n p 1●● ●, J
静止参考坐标 系下, 相异步 电机转子绕组电压平衡方 两 程与 电流模型方程分 别为 :
维普资讯
《自适应控制》课件
参考文献
文献1 文献2 ……
通过对被控对象进行实验测 定,确定其动态特性参数。
状态观测理论
通过滤波、估计等方法,对 被控对象未知状态进行实时 观测。
模型参考自适应控 制理论
基于模型参考原理的自适应 控制理论,如MRAC算法、 Model-free算法等。
基于模型参考自适应控制算法
1
基于最小二乘法的MRAC算法
通过建立被控对象和控制器的最优权重匹配模型进行控制。
自适应控制的基本概念
系统模型的表示
通过构建合适的系统模型来描 述被控对象的动态特性。
控制器的表示
通过合理设计控制器结构和参 数,实现对被控对象的自适应 控制。
自适应控制算法的分类
基于系统模型或反馈信号进行 参数计算的算法,如MRAC算 法、Model-free算法等。
自适应控制的基础理论
参数辨识理论
自适应控制在飞行器控 制中的应用
通过改进控制方法,提高飞行 器的控制精度和稳定性,并提 高飞机的效率。
总结
1 自适应控制的优势和限制
2 优点, 但也存在精度不高、计算量大等限制。
随着计算机技术的不断进步,自适应控制 将在更广泛的工业应用中得到应用。
2
基于模型预测控制的MRAC算法
通过预测被控对象的状态和输出,实现控制器参数的逐步修正。
自适应控制在实际应用中的应用实例
自适应控制在电机控制 中的应用
通过改进控制方法,提高电机 效率和精度,并提高电机的动 态响应性。
自适应控制在化工过程 中的应用
通过精细含水率控制、温度控 制等,实现精细控制和生产效 率的提高。
《自适应控制》PPT课件
了解自适应控制的定义、基本概念,了解自适应控制在实际应用中的应用实 例,以及自适应控制的优势和限制。
一种基于模糊自适应PID的电动执行器智能控制方法
1引言近年来电动执行器系统的控制策略得到了越来越多的研究,对系统的稳定运行发挥着关键作用。
电动执行器系统的控制方案主要包括驱动电机以及系统主要单元的控制策略。
系统需要提供相当多的转矩和转速,以控制阀门开度。
对于系统的动态调节,其响应速度应该相对够快,以达到系统控制精度要求。
传统阀门位置控制常采用PID 方法,该方案是基于比例、积分、微分输出控制量,来实现对系统的准确控制,具有相对简单、容易实现等特点。
然而,当被控对象的环境经常变化,即需频繁调整控制参数,对该方法的实际应用提出了限制。
因此,需要对以往的PID 策略进行改进,一种方案是改进传统控制结构,另一种则是采用智能控制方法[1]。
文献[2]研究了PID 控制方案,针对电子液压制动系统下电动执行器调节阀的控制,电动执行器流量调节阀采用传统的控制方法即可实现输出流量精确、快速的跟踪,然而系统具有较差的鲁棒性。
文献[3]采用校正控制,进一步减小了系统超调及稳态误差,大大提升了执行器系统的响应速度和抗扰动能力,并且明显改善了回差。
文献[4]研究了基于增量一种基于模糊自适应PID 的电动执行器智能控制方法李伟华(苏州博睿测控设备有限公司,苏州215143)摘要:电动执行器的系统控制方案研究在近年有较大进展。
传统控制方案基于PID 的控制策略易于在通常的实际控制系统中实现,但对于控制系统复杂程度较高的场合,传统控制方法已不能适应系统鲁棒性和实时性的要求。
为解决此问题,提出基于模糊自适应PID 的执行器系统智能控制方案。
实验结果表明,新方案有较好的动态表现以及较快的响应,并且具有较高的调节准确度,能够实现PID 参数的在线自调整,实时性更好,控制精度和鲁棒性更高,参数计算负荷小,设计方法易于实现。
关键词:模糊控制;自适应;PID 控制;智能控制DOI :10.3969/j.issn.1002-2279.2021.02.015中图分类号:TP273+.4文献标识码:A 文章编号:1002-2279(2021)02-0058-04An Intelligent Control Method of Electric Actuator Based onFuzzy Adaptive PIDLI Weihua(Suzhou Bonray Measurement&Control Equipment Co.,Ltd,Suzhou 215143,China )Abstract:Recently,great progress has been made in the research of system control scheme of electric actuator.The PID-based control strategy of the traditional control scheme is easy to be realized in the common practical control system,but the traditional method can no longer meet the requirements of system robustness and real-time when the control system is complex.To solve the problem,an intelligent control scheme of actuator system based on fuzzy adaptive PID is proposed.Experimental results show that the new scheme has better dynamic performance and faster response,as well as higher adjustment accuracy,which can realize on -line self -adjustment of PID parameters,with better real -time,higher control accuracy and robustness and less parameter calculation load,and the design method is easy to realize.Key words:Electric actuator;Fuzzy control;Self-adaptation;PID control;Intelligent control作者简介:李伟华(1978—),男,陕西省西安市人,助理工程师,主研方向:测控技术及仪器。
基于PLC技术的直流电机转速控制系统设计
基于PLC技术的直流电机转速控制系统设计目录一、内容概括 (2)1.1 直流电机简介 (2)1.2 PLC技术概述 (3)二、系统需求分析 (4)2.1 控制要求 (6)2.2 性能指标 (6)三、系统设计 (7)3.1 系统结构设计 (9)3.2 PLC选型与配置 (10)3.3 传感器模块设计 (11)3.4 人机界面设计 (13)四、控制算法设计 (14)4.1 PID控制算法原理 (15)4.2 PID参数整定方法 (17)4.3 控制算法实现 (18)五、系统实现与调试 (20)5.1 系统搭建 (21)5.2 调试过程 (22)5.3 调试结果分析 (23)六、系统测试与应用 (24)6.1 测试环境与方法 (26)6.2 测试结果分析 (26)6.3 系统应用场景探讨 (28)七、总结与展望 (29)7.1 系统总结 (30)7.2 未来展望 (31)一、内容概括本文档主要探讨了基于PLC技术的直流电机转速控制系统的设计方案。
介绍了直流电机的基本原理和转速控制的重要性,以及PLC 技术在工业自动化中的广泛应用。
详细阐述了系统设计的目标、硬件选型、软件设计和实现方法。
在系统设计目标中,我们强调了高精度、高稳定性和实时性,以满足实际应用中对电机转速控制的高要求。
硬件选型部分,选择了功能强大的PLC作为控制核心,并配置了相应的输入输出模块和传感器,以实现对电机转速的实时监测和控制。
软件设计方面,采用了梯形图编程语言,编写了功能完善的控制程序,包括初始化、速度调节、故障处理等模块。
在实现方法上,我们描述了如何通过PLC编程实现对电机的速度控制,以及如何通过调试和优化,确保系统的稳定运行和高效性能。
本文档旨在为读者提供一个基于PLC技术的直流电机转速控制系统的设计思路和方法,具有一定的实用性和参考价值。
1.1 直流电机简介直流电机(DC Motor)是一种将电能转换为机械能的电动机,广泛应用于各种机械设备中。
基于Matlab的无刷直流电机自适应控制系统的研究
PD控制策略虽然算法简单 、 I 快速性好 、 控制精度高 , 但仅在被控对象数学模型 已知 的前提下适用 。在噪声、 负载扰动等因素的影响下 , 过程参数甚至模型结构均会随时间和工作环境 的变化而变化。这就要求在 PD I
控制中 , 不仅 PD参数 的整定不依赖于对象数学模型 , I 并且能够在线调整 , 以满足实时控制的要求。 为了使无刷直流电机调速系统在参数发生变化 的情况下获得精确的速度控制 , 本文以 S u n i l k为仿真 m i 平台, 将单神经元 自适应控制器引人到无刷直流电机控制系统中并对其进行了建模和仿真分析。
( =e )=r )一Y ) ) ( ( ( 图 1 单 神 经元 自适应 PD控 制结构 图 I
X ( )=e k 2k ( )一ek一1 ( ) X ( ) =e k k ( )一2 ( ek~1 )+ek一2 ( ) 式 中 ek 为误差 ;() () rk 为输 人 ;( ) y k 为反馈 。
( 3 )
式中: —— 电磁转矩 , ——负载转矩 ,——阻尼系数 ,——电机机械角速度 , B J —— 电机转动惯量。
效果良好。但当实际被控对象存在强干扰 , 具有高度非 线性和不确定性时, 仅靠 PD调节效果不好。而单神经 I
元 PD调节器本 身具 有适 应 、 I 自学 习能力 。单 神 经元 自 适应 PD控制结 构 如 图 l I 所示 : 假 设 是单 神经 网络输 入 量 , 是对 应 权值 , 。 K为 比例 系数 。取神 经元 的输 入为 :
ห้องสมุดไป่ตู้
速系统。仿真结果表明: 这种新型的控制方法响应快、 无超调、 鲁棒性强, 较传统 PD控制具有 I
更好 的动 、 态特性 。 静
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于自适应控制方法的电机转速控制
自适应控制是电机转速控制领域中的一种重要方法,它可以通过实时监测和调整电机运行状态来改善控制效果。
在本文中,我们将介绍自适应控制方法的原理和应用,以及在电机转速控制领域的实际应用。
一、自适应控制的原理
自适应控制(Adaptive Control)是一种基于实时反馈机制的控制方法,它可以根据系统实时状态动态调整控制参数,从而实现更加准确和稳定的控制效果。
自适应控制方法的理论基础是反馈控制理论,它利用系统的测量信号和参考信号之间的误差来实现控制。
在电机转速控制中,自适应控制方法可以利用电机的转速信号和指令信号之间的误差来实现控制。
具体来说,它通过实时计算电机转速的反馈误差,并将误差反馈到控制器中进行参数调整,从而实现更加准确和稳定的转速控制。
二、自适应控制在电机转速控制中的应用
自适应控制方法在电机转速控制领域中应用广泛,它可以通过实时调整控制参数来克服系统变化和非线性等问题,从而实现更加准确和稳定的转速控制。
以下是自适应控制在电机转速控制中的几个具体应用场景:
1. 矢量控制
矢量控制是一种基于自适应控制方法的电机控制技术,它可以实现更加准确和稳定的电机转速控制。
具体来说,它通过实时监测电机磁场状态和转速状态,计算出电机转速误差,并通过自适应控制方法来调整控制参数,从而实现更加精确的转速控制。
2. 直流电机控制
直流电机是一种常见的电机类型,它在很多行业中得到广泛应用。
自适应控制方法在直流电机控制中也应用广泛,它可以通过实时监测直流电机的转速和电流状态,并通过自适应控制方法实时调整控制参数,从而实现更加准确和稳定的转速控制。
3. 交流电机控制
交流电机是一种高效、稳定和可靠的电机类型,它在很多工业领域中得到广泛应用。
自适应控制方法在交流电机控制中也应用广泛,它可以通过实时监测电机的转速和电流状态,并通过自适应控制方法实时调整控制参数,从而实现更加准确和稳定的转速控制。
三、自适应控制方法的优势
自适应控制方法具有以下优势:
1. 适用性强。
自适应控制方法可以适用于各种复杂和非线性的电机控制系统,具有很强的通用性。
2. 稳定性好。
自适应控制方法可以通过实时监测和调整系统的状态,实现更加准确和稳定的控制效果。
3. 操作简便。
自适应控制方法可以通过简单的数学模型和实时反馈机制来实现控制,操作简便。
4. 兼容性强。
自适应控制方法可以与其他控制方法相结合,实现更加复杂和高效的电机控制效果。
四、总结
自适应控制方法是电机转速控制领域的一种重要方法,它可以通过实时监测和调整电机运行状态来改善控制效果。
自适应控制方法在矢量控制、直流电机控制和交流电机控制等领域都有广泛的应用,具有很强的通用性、稳定性和操作简便性。
在未来,自适应控制方法将继续在电机控制领域中发挥重要作用,为提高电机运行效率和控制精度做出更大贡献。