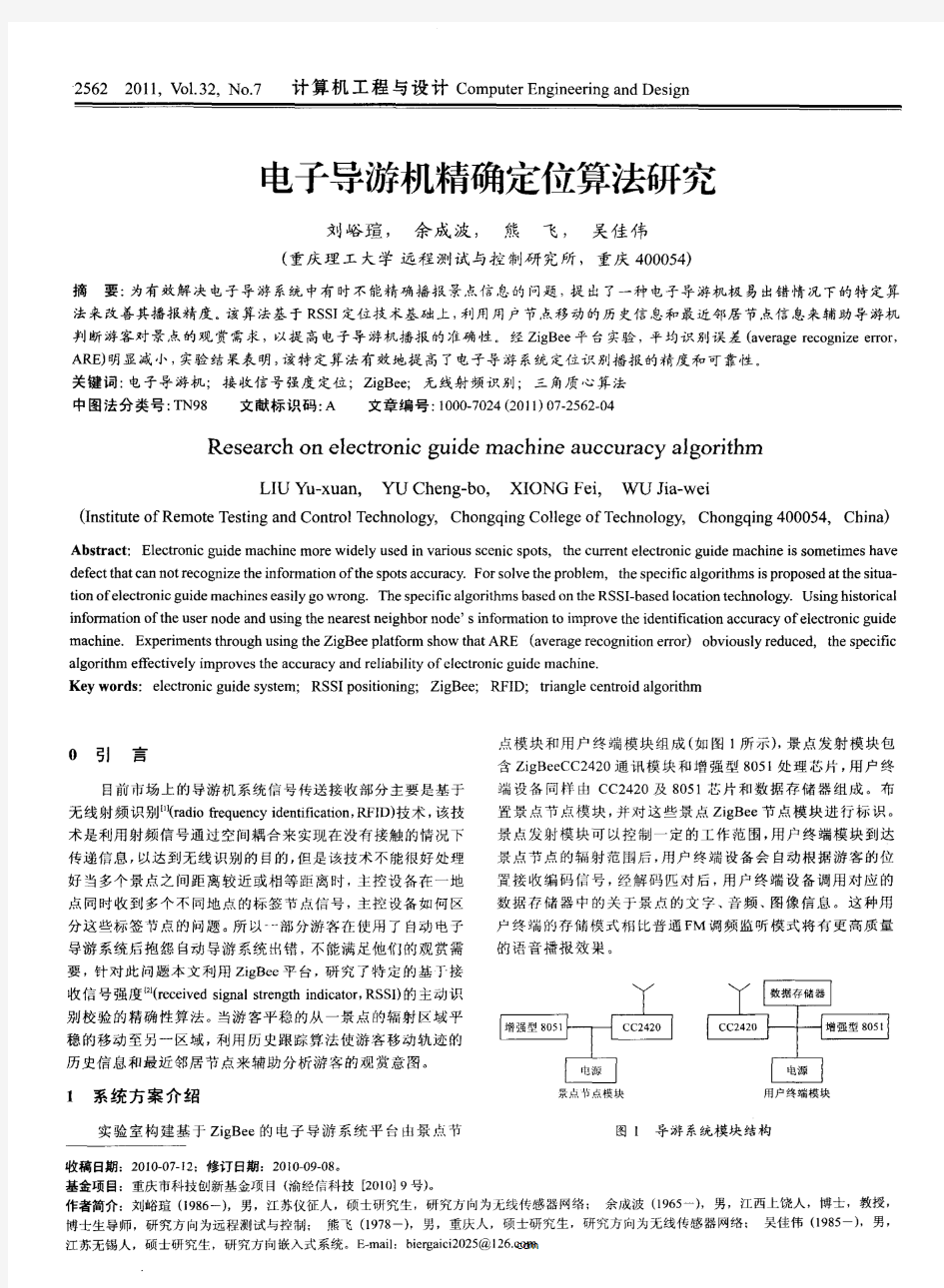
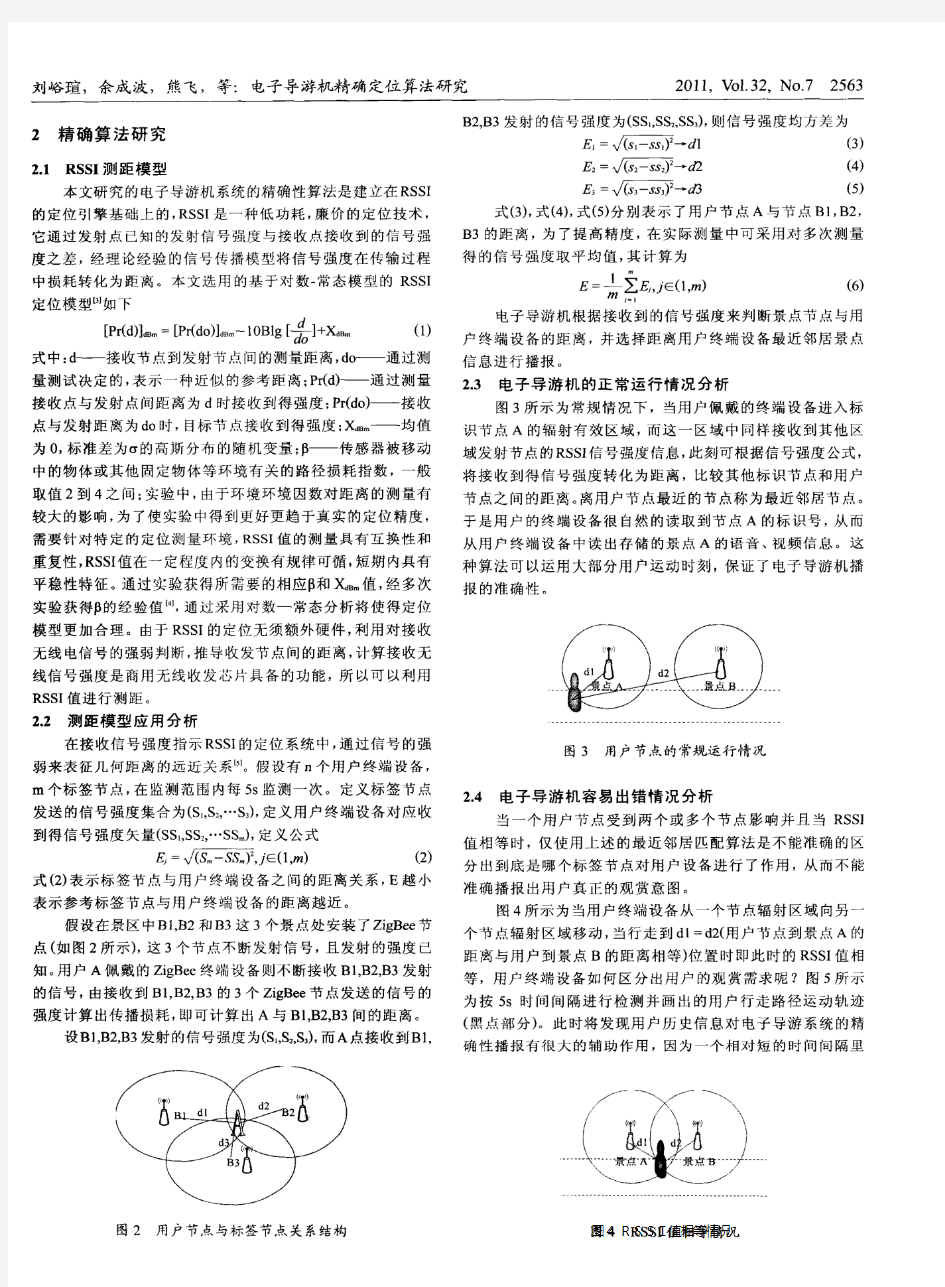
电子导游机精确定位算法研究
高精度超短基线在水下定位中的应用
高精度超短基线在水下定位中的应用高精度超短基线定位系统在水下定位中的应用 1 2张粤宁刘鹏 (1.武汉长江航道救助打捞局,武汉430014;2.上海地海仪器有限公司,上海200233) 摘要:声学定位系统(Acoustic Positioning System)的技术研究和应用开发在现代海洋科学调查和水下施工中起着重要作用。本文以某品牌超短基线定位系统为例,就超短基线 hort BaseLine)声学定位系统的原理、应用范围等几个方面展开讨论,同时介绍(Ultra S 了高精度超短基线工程中的实际应用,对使用过程中影响定位性能的主要因素进行了简单分析。 关键词: 超短基线水下定位 1 概述 20世纪90年代以来,世界先进国家的海洋调查技术手段逐步成熟与完善,其中超短基 线(简称USBL)水下设备大地定位技术也获得了长足的发展。高精度水下定位系统具有 广泛的用途,在海洋探测研究、海洋工程、水下建筑物施工、潜水员水下作业、水下考 古、海洋国防建设等方面,都离不开水下定位系统为其提供高精度、高质量的定位资料, 因此高精度水下定位技术对维护国家领土权益和国民经济建设都具有重要意义。
1(1关于水下声学定位系统 20世纪50,60 年代,在国际上,随着光、声、磁等技术的不断发展,在大力开发海洋自然资源和海洋工程的进程中,水下探测技术得到了较大发展,相继开发了一系列先进的、高效能的水下探测设备:在各种水下检测的光、声、磁技术中,由于水下光波衰减很快,即使是波长最长、传播最远的红外光波在水中传播到了几米以后也衰减完了,而声波和电磁波在水中有良好的传播性,因而,声呐、磁探和超短基线成为水下检测的有效方法。 声学定位系统最初是在19世纪60年代的时候被开发出来用于支持水下调查研究。从那时起,这类系统便在为拖体,ROV等水下目标的定位中成为了重要角色。声学定位系统能够在有限的区域内提供非常高的位置可重复精度,甚至在远离海岸。对大多数用户来说,可重复性精度要比绝对精度重要。 在声学定位系统中,有3种主要的技术:长基线定位(LBL),短基线定位(SBL),和超短基线定位(SSBL/USBL),有些现代的定位系统能组合使用以上技术。 长基线(LBL):长基线定位能在宽广的区域内提供高精度的位置,它需要至少3个应答器组 成的阵列部署在海底上的已知点上,水面舰只安装一个换能器。换能器测量出到水底应答器的斜距,从而计算出自身的坐标位置。
基于PCA算法的人脸识别毕业设计论文
太原科技大学 毕业设计(论文) 设计(论文)题目:基于PCA算法的人脸识别
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期: Ⅰ
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日 Ⅰ
水下和海底大地坐标的精确测量
文章编号:1009-671X(2003)09-0019-03 水下和海底大地坐标的精确测量 张 炜1,王大成2 (1.中国人民解放军91550部队,辽宁大连 116000;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨 150001)摘 要:潜艇水下高精度定位,长期以来一直是水下导航定位领域的一个难题.为了解决潜艇在水下长时间航行过程中的高精度定位问题,提出了一种比较实用的解决方案.该方案构建了由DGPS 定位和水声定位相结合的水下定位系统.系统采用系缆浮筏作为潜艇,利用DGPS 进行水下定位的中继站,利用水声相对定位技术将DGPS 水面定位向水下延伸,使潜艇在工作潜深就可以直接获得自身的大地经纬度坐标.系统将DGPS 的优良性能与超短基线在水下定位中的优势很好地结合在一起,其定位精度可以保证与DGPS 水面定位精度在同一量级.关 键 词:DGP S;高精度;水下定位中图分类号:T B568 文献标识码:A Precision measurement of coordinates of underwater and sea bed ZHANG Wei 1,WANG Da cheng 2 (1.T he Chinese Peo ple s Liberation Army No.91550,Dalian 116000,China;2.School of U nder water Acoust ic Engineer ing ,Harbin Eng ineering U niversity ,Har bin 150001,China) Abstract:For a long time,high precision positioning for underw ater submarine has been a difficult problem in the field of underw ater navigation and positioning.The traditional positioning for submarine depends on inertial navigation system (INS).But the positioning error of INS accumulates along w ith time.In order to solve the problem of high precision positioning for underw ater subm arine,this paper proposed a relatively practical scheme.T his scheme constructs an underw ater positioning system based on the combination of DG PS and acoustical positioning.This method makes use of acoustical relative positioning technique for ex tend ing the DGPS positioning technique for surface applications to underw ater cases.With this positioning sys tem ,the submarine can directly get its long itude and latitude,and the positioning precision can ensure the same level as the surface application cases of DGPS. Key words:DGPS;high precision;underwater positioning 大地坐标点的测量有两种工作状态需要考虑.第一,水中和海底运动目标大地坐标的实时测量.这在ROV 、水下机器人等的水下作业和潜艇、潜器、水下无人作战平台等军事武备水下实验过程中是经常遇到的.第二,固设于海底处的大地测量控制点坐标的测量.这是被称为 海洋大地测量!任务的一项基础性工作[1],它对于潜艇水下航行、各种水下作业、海底地图测绘等有重要作用. 近年来,由于差分式全球定位系统(DGPS)和高精度水声定位技术的飞速发展,为水下以及海底高精度大地坐标的精确测量提供了更先进的技术手段.尤其是国家海事局在北起大三山、南至防城和三亚港,沿整个海岸线建成的包括总计有20个差分站组成的RBN/DGPS 系统,使无线电差分信号有效地覆盖了我国以海岸为基线的大约300km 的水域范围.再加上美国出于自身商业利益的考虑,取消了C/A 码上的精度干扰,使得DGPS 系统的应用更加方便和有效. 近年来国内外的水声定位技术不断发展,定位精度不断提高,轻便易用的超短基线水声定位系统(USBL 系统)原有的相位模糊(目标定位位置跳象限)、在与基阵面垂直向下的方向和水平方向存在低精度区等缺点,已被克服,加上采用一系列的近代信号处理技术,使USBL 系统能以稳定的高精度测量结果参与水下或海底点坐标测量系统[2,5]. 收稿日期:2002-06-28. 作者简介:张 炜(1961-),男,工程师,主要研究方向:测控技术. 第30卷第9期 应 用 科 技 Vol.30,?.92003年9月 Applied Science and Technology Sep.2003
导游如何带好团队。范文电子教案
很多新导游常常感叹,团太难带,赚不到钱,受累还受气,面对比孙猴子还精的客人,客人走错了就可以看到特产,老导游也时常出现日暮西山的苍凉。 黑格尔有句名言——存在即合理,造成今天这种局面不是某个人的错,是恶性竞争也好,是游戏规划太残酷也好,都不是我们今天要讨论的,我们要做的是,在这“内忧外患”的时刻,战斗在旅游业最前线的导游兄弟姐妹们如何武装自己,杀出重围,争得自己的一席之地。 经历过“非典”和“地震”的我,深知作为导游的艰辛,几点心得体会愿与兄弟姐妹们分享,正所谓有则改之,无则加勉,不足之处,请多指正。 一、如何标准化带团(“标准”释义为一般而言,起码) 1、接团之前的准备工作 通过上网查询了解客源地基本情况,如经济状况、特产、名人、新闻等,在讲解时偶尔穿插,尤其是特产、名人不但可引起客人的共鸣,并且可在一定程度上满足客人的虚荣心。 如果是系列团的第二批,一定要问清楚第一批的基本情况,尤其是加点购物的价格、数量等。 给全陪或领队打个电话,告诉对方气温变化,嘱咐客人带好衣物、雨具、晕车药。 跟司机衔接好,确定车型、车况、有无话筒,千万不要忽视了这些细节的东西,导游本身就是一个需要面面俱到管家式的工作,注重每一个细节,防微杜渐,你会发现受益最大的其实是你自己。 2、务必精彩的欢迎词 接团之后,用不低于15分钟的时间致欢迎词一个行程当中最重要的两次讲解,一个是欢迎词,一个欢送词。为什么呢?俗话说:好的开始是成功的一半,精彩的欢迎词是为了打开局面,其实一般的游客都可以从导游上车后的前半个小时通过穿着打扮,语速语调以及导游词的精彩程度判断出导游的水平高低,游客初来乍到,什么都感到新鲜,什么都想知道,这个时期的游客是最缺乏安全感的,是需要被引导的,如果在这个时候能让客人通过你的欢迎词感受到你的热情,幽默和真诚,便可乘虚而入,在客人心中留下美好的第一印象,从而更好的开展后面的工作。 3、第一次亲密接触 当第一次讲解完毕或是第一个晚上入住酒店时,务必对客人进行第一次摸底,也就是搞清楚团队的属性。首先,客人是否同一个单位?什么单位?公费还是自费抑或“半公半自”?团里面最大的头是谁?管钱的又是谁?几男几女?有没有夫妻等等基本情况。然后当行程快走到一半的时候,最好通过跟客人互动做游戏的方式找出三个人,第一,说话最管用的;第二,最活跃最配合你的;第三,毛病最多最不配合你的。具体操作如下:尊重说话最管用的,拉拢最活跃的,提防最讨厌的。
人脸识别技术的几个主要研究方向
人脸识别技术的几个主要研究方向 1 引言 计算机人脸识别是指基于已知的人脸样本库,利用计算机分析图像和模式识别技术从静态或动态场景中,识别或验证一个或多个人脸。通常识别处理后可得到的基本信息包括人脸的位置、尺度和姿态信息。利用特征提取技术还可进一步抽取出更多的生物特征(如:种族、性别、年龄..) 。计算机人脸识别是目前一个非常活跃的研究课题,它可以广泛应用于保安系统、罪犯识别以及身份证明等重要场合。虽然人类对于人脸的识别能力很强,能够记住并辨识上千个不同的人脸,可是对于计算机则困难多了,其表现在:人脸表情丰富;人脸随年龄的增长而变化;发型、胡须、眼镜等装饰对人脸造成的影响;人脸所成图像受光照、成像角度以及成像距离等影响。 计算机人脸识别技术是近20年发展起来的,90年代更成为科研热点,仅从1990 年到1999年之间,EI 可检索到的相关文献多达数千篇,关于人脸识别的综述也屡屡可见[1] 。自动人脸识别系统包括两个主要技术环节首先是人脸检测和定位,然后是对人脸进行特征提取和识别(匹配)。本文着重介绍人脸识别技术的各类方法,通过对比指出各类方法的优缺点及今后的发展方向。 2 人脸检测和定位 人脸检测和定位即对于给定的一幅图像检测图像中是否有人脸,若有则确定其在图像中的位置,并从背景中分割出来。这是个极富挑战性的问题,因为人脸是非刚体,且人脸在图像中的大小和方向以及人的肤色和纹理等方面有很大的可变形。人脸检测问题主要有四种:(1)对于给定的一幅人脸图像,将其中的人脸定位并给出其位置;(2)在一幅混乱的单色场景图中检测出所有的人脸;(3)在彩色图像中检测(定位)所有人脸;(4)在某一视频序列中,检测和定位出所有人脸。文献[2]对人脸检测进行了较为详细的综述,指出常用的人脸检测方法有四种:(1)基于知识的方法;(2)基于人脸固定特征的方法;(3)基于模板匹配的方法;(4)基于外貌的方法(Appearance-based methods),在基于模板匹配的方法中所采用的是预先确定的模板,而在基于外貌的方法中其模板的选择是通过对一系列图像的学习而确定的。一般来说,基于外貌的方法依靠统计和学习技术来找出人脸和非人脸图像的相关特征。在该方法中有特征脸法、基于聚类的方法、神经网络方法和支持向量机的方法。CMU库是常用的人脸检测库,主要的算法评定指标为错误接受率(FAR)和错误拒绝率(ARR)。 3 人脸特征提取和识别 目前大部分研究主要是针对二维正面人脸图像,也有基于三维人脸模型的方法,还有一种所谓的混合系统的身份鉴定系统。 3.1 二维正面人脸识别 在对人脸图像进行特征提取和分类之前一般需要做几何归一化和灰度归一化。几何归一化是指根据人脸定位结果将图像中人脸变换到同一位置和同样大
人脸识别技术的主要研究方法
1、绪论 人脸识别是通过分析脸部器官的唯一形状和位置来进行身份鉴别。人脸识别是一种重要的生物特征识别技术,应用非常广泛。与其它身份识别方法相比,人脸识别具有直接、友好和方便等特点,因而,人脸识别问题的研究不仅有重要的应用价值,而且在模式识别中具有重要的理论意义,目前人脸识别已成为当前模式识别和人工智能领域的研究热点。本章将简单介绍几种人脸识别技术的研究方法。 关键词:人脸识别 2、人脸识别技术的主要研究方法 目前在国内和国外研究人脸识别的方法有很多,常用的方法有:基于几何特征的人脸识别方法、基于代数特征的人脸识别方法、基于连接机制的人脸识别方法以及基于三维数据的人脸识别方法。人脸识别流程图如图2.1所示: 图2.1人脸识别流程图 3、基于几何特征的人脸识别方法 基于特征的方法是一种自下而上的人脸检测方法,由于人眼可以将人脸在不此研究人员认为有一个潜在的假设:人脸或人脸的部件可能具有在各种条件下都不会改变的特征或属性,如形状、肤色、纹理、边缘信息等。基于特征的方法的目标就是寻找上述这些不变特征,并利用这些特征来定位入脸。这类方法在特定的环境下非常有效且检测速度较高,对人脸姿态、表情、旋转都不敏感。但是由于人脸部件的提取通常都借助于边缘算子,因此,这类方法对图像质量要求较高,对光照和背景等有较高的要求,因为光照、噪音、阴影都极有可能破坏人脸部件的边缘,从而影响算法的有效性。 模板匹配算法首先需要人TN作标准模板(固定模板)或将模板先行参数化(可变模板),然后在检测人脸时,计算输入图像与模板之间的相关值,这个相关值通常都是独立计算脸部轮廓、眼睛、鼻子和嘴各自的匹配程度后得出的综合描述,最后再根据相关值和预先设定的阈值来确定图像中是否存在人脸。基于可变模板的人脸检测算法比固定模板算法检测效果要好很多,但是它仍不能有效地处理人脸尺度、姿态和形状等方面的变化。 基于外观形状的方法并不对输入图像进行复杂的预处理,也不需要人工的对人脸特征进行分析或是抽取模板,而是通过使用特定的方法(如主成分分析方法(PCA)、支持向量机(SVM)、神经网络方法(ANN)等)对大量的人脸和非人脸样本组成的训练集(一般为了保证训练得到的检测器精度,非人脸样本集的容量要为人脸样本集的两倍以上)进行学习,再将学习而成的模板或者说分类器用于人脸检测。因此,这也是j 种自下而上的方法。这种方法的优点是利用强大的机器学习算法快速稳定地实现了很好的检测结果,并且
基于LBP的人脸识别算法研究
基于LBP的人脸识别算法研究 一、应用背景 随着社会的发展以及技术的进步,人们对快速、高效的自动身份验证的要求日益迫切,生物识别技术在科研领域得到了极大的重视和发展。在人与人的接触中,人脸所包含的视觉信息占据了重要地位,它无疑是区分人与人之间差异的最重要特征之一。相对于指纹、虹膜、掌纹、步态、笔迹、声纹等生物特征,利用人脸来识别具有不可比拟的优势:操作隐蔽,特别适用于安全、监控、和抓逃工作;非接触式采集,无侵犯性,容易接受;方便、快捷、强大的实时追踪能力;符合人类识别习惯,交互性强;应用摄像头即可完成图像采集,设备成本较低。人脸识别属于计算机科研领域的一项热门技术,它是一种基于生物特征的识别技术,利用计算机从图像或图像序列中检测出人脸,并判断其身份。 人脸识别目前主要运用在如下三个方面: 第一,刑侦破案方面。例如,公安部门获得案犯的照片之后,可以利用人脸识别技术在存储罪犯照片的数据库中找出最相像的人,即嫌疑犯。 第二,证件验证方面。如身份证、驾驶执照以及其他很多证件上都有照片,现在这些证件多是人工验证的,如果应用人脸识别技术,这项任务就可以交给机器去完成,从而实现自动化智能管理。 第三,人口控制方面。此应用范围很广,例如可以设在楼宇单位或者私人住宅入口的安全检查,也可以是计算机系统或者情报系统等的入口检查。 世界上很多国家都在积极地开展对人脸识别技术的相关研究,不同的研究机构或研究人员按照不同的划分标准,对人脸识别的研究内容的分类不尽相同。在此处按其所研究得具体技术的范围可以大致将人脸识别分为如下四个方面的内容来进行阐述: (1)人脸检测,主要的方法有:基于轮廓(或肤色等)信息人脸检测方法,基于Adaboost 算法人脸检测方法,基于支持向量机(SVM)人脸检测方法以及基于神经网络的人脸检测方法等; (2)人脸特征描述与提取即特征提取,主要方法:基于局部二值模式纹理特征提取方法,基于人脸几何特征的特征提取方法,还有基于主成分特征(PCA)特征提取方法,基于独立元特征的特征提取算法,如Gabor等,还有2D 和3D 形变模型方法等; (3)人脸特征降维,主要方法:线性降维方法如主成分分析PCA和LDA (Linear Discriminate Analysis) 等发展到非线性降维方法如局部线性嵌入(LLE) 、等距嵌入
电子导游
一、电子导游的定义 电子导游是相对于人工导游而言的,目前对电子导游的理解,是指利用电子技术原理制造的各种导游讲解设备系统,用于改变原有人工导游讲解方式和方法,称之为电子导游,英文经常翻译为Audio Guide。其中包括采用数码技术供游客自由选听的“数码按键播放机”,另外利用视频与网络技术将重要文物做成视频图像和配上解说供参观者观赏的“触摸式视频讲解系统”,还有在固定景点上使用的而且最方便管理的投币方式的“电子导游机”,再有目前最为先进的通过对游客进行了简单定位,从而根据游客位置的变化,自动介绍这个景点内容的“自动导游讲解器”等等。 二、电子导游在国内外旅游景点的应用现状 (一)国际旅游景点电子导游应用现状 目前先进的发达国家大都采用非导游讲解的讲解器。在博物馆等室内展馆,基本上取消了导游讲解。特别是噪音比较大而又影响其他人参观的高音喇叭,在国外基本上找不到它的踪影。游客进展馆后,自己拿讲解器按说明书上的说明听讲解,听完以后自觉放回原处,以便供下位游客继续使用。所以他们的博物馆很安静,根本没有人为的杂音。 此外,美国马萨诸塞州一家公司还发明了一种便携式电子导游器,它储存了包括美国大陆主要高速公路在内的35000项数据资料。只要游人提供目的地的里程和方面,便可定出旅游计划。在旅途中,游人只需输入所在州名、高速公路、方向及最近的里程碑,便可获得餐馆、加油站、医院、旅游景点等信息。除此之外,它还可以提供地方高速公路交通警的电话号码,当地天气、旅游公司、汽车旅馆以及俱乐部等有关情况。这种电子导游器起到了电子地图和指引路线的作用,因此,只要手持电子导游器,游人就不会迷路。 在美国、英国、法国、加拿大等国的一些旅游城市都有出租最先进的电子导游,租金平均是约合350人民币一天,或者1600人民币一周。这种电子导游看上去和普通的掌上电脑没什么区别,当你带上它开车经过或者走过相关的景点的时候,这款电子导游就会播放一段该景点的语音介绍,告诉你相关的历史和故事。光讲故事可不够,电子导游还可以告诉你如何行车到达目的地,前方有什么景点、餐馆或者酒店。这种电子导游最受外国游客和自驾游朋友的欢迎。 (二)我国电子导游应用现状 在我国电子导游还是个新生事物,2000年开始在广西桂林漓江开始出现,6年来国内的各著名旅游景点都已经开始引入电子导游,但是国内的应用主要还停留在数码按键播放机和触摸式视频讲解系统上,前者如广西桂林漓江、陕西皇帝陵、天津博物馆等大部分旅游景点采用的数码按键播放机,每一个新景点按一下相应的键,然后就可以听到导游词;后者如广
水下砼灌注桩钢筋笼的准确定位及防止其上浮的措施
水下砼灌注桩钢筋笼的准确定位及防止其上浮的措施 1 保证安装在砼灌注桩中钢筋笼位置的准确的方法1.1 桩基定位要准确和做好保护桩的工作在桩施工前,首先要进行桩基位置的定位,桩位的准确是保证桩基及钢筋笼子位置准确的前提条件,这里就涉及到工程施工中桩基的定位的问题,施工员的工作不仅要把桩基的位置找准,而且还要做好保护桩的工作,以备桩基施工钢筋定位等后期使用。施工现场都要出入一些大型工程车辆,一不注意就将事先布置好的保护桩碾压破坏掉,因此在做保护桩的时候,考虑的是不仅能方便恢复桩位点,而且还要尽量避免做好的保护桩遭到破坏。以上只是最基本的保证桩基位置准确的方法,更重要的是保证钢筋笼在桩基中混凝土位置的准确,下面进行一些简要的介绍。1. 2 护筒的质量、规格要满足施工的要求钻孔使用的护筒要圆而且制作护筒的钢板不能小于8 毫米(冲击钻施工时用的护筒的钢板不能小于12 毫米),护筒的直径应比桩基的直径大约200~300 毫米左右即可(冲击钻施工时护筒的直径要比上述值适当大些),埋设护筒时使其中心与桩位的中心重合,(规范中规定误差不能超过50 毫米,实际操作中要控制在20 毫米内),因为护筒是保证钢筋笼位置准确的第一个屏障,钢筋笼子要通过护筒安装进桩基钻孔内。另外护筒周围的回填土要尽量用不易渗水的粘土或煤矸石粉沫等回填,并要夯打结实。防止钻孔施工时外溢的泥浆渗过护筒周围的回填土,从而使护筒的位置倾斜或者发生位置改变。1. 3 做到钻杆中心和桩位中心重合埋好护筒后开始稳钻机,钻机的基础平
台要平整和结实,稳钻机时最重要的是保证钻杆的中心和桩位的中心要重合,并且要保证钻机的竖直,使钻机的磨盘中心和桩位的中心重合为止(通过吊线坠检查两者误差不宜超过10 毫米);冲击钻是使其钢丝绳中心和桩位的中心重合,经校和无误后才能制备泥浆准备钻孔。在钻孔的过程,通过保护桩恢复桩位中心,在钻孔时,要经常检查、校和钻杆的中心是否与桩位中心重合。1.4 壁杆与吊线坠相结合的方法来控制钢筋笼子的位置准确性为了保证安装后的钢筋笼能在钻孔灌注桩的中心位置,通常在安装钢筋笼之前,用长6m~8m,直径50~80mm 的钢管在一端焊接上?型的挂钩,制作4~6 个壁杆,均匀挂在护筒的四周后,才能开始安装钢筋笼子。在护筒的周围均匀安装4~6 个壁杆的目的是能使钢筋笼在壁杆的挤靠下,在钻孔内保持垂直,同时也能有效防止钢筋笼嵌入孔壁的泥里,设计上在钢筋笼周围上焊接几个长几十厘米长的]型的钢筋来做混凝土的保护层几乎是没有用的,经过实践检验,壁杆的作用基本上能控制住钢筋笼的位置,使其不会有产生太大的偏差,使钢筋笼子的位置基本上能满足规范规定的要求。精确的控制还要用吊线坠来实现,在安装完钢筋笼后,通过保护桩恢复桩位的中心点,然后抽孔内的泥浆,直到漏出钢筋笼的顶面,在钢筋笼的顶端挂十字线,用线坠来校和钢筋笼上挂的十字线中心与桩位的中心是否重合,否则用大锤、钢管敲打、撬动钢筋笼的吊筋使其中心与桩位的中心重合为止。但当钢筋笼的顶面至泥浆的上面距离较大时,抽泥浆的方法往往容易造成塌方,因此用吊线坠的方法就不再适用。
精确定位相对点的常用方法
在AUTOCAD里完全能用的上啊,很好用的。 CAD图形对象通常是通过指定点的位置或输入坐标值来绘制的。尧创CAD2010的定位功能功能异常丰富,可以输入绝对坐标值定位,可以捕捉对象特征点精确定位,可以运用正交导航、极轴导航、对象追踪导航定位,还可以输入相对坐标值进行定位……。其中,输入相对坐标值定点的方法用得比较普遍,也最灵活多变。下面以如何定位图中的圆心为例介绍几种精确定位相对点的常用方法: 图(一) 1. 直接距离输入法 直接距离输入法:通过移动光标指示方向然后输入距离来指定点。 直接距离输入法与极轴导航结合使用,可以绘制指定长度和角度的直线。其操作步骤: 1)启动 LINE 命令并指定第一点; 2)移动光标,直到显示与要绘制直线相同的角度的导航虚线(前提:极轴导航开启,设置极轴导航角中包括所要绘制的角度)。 3)在命令提示下,输入距离。 直接距离输入法也可以和对象捕捉和对象追踪结合使用,准确定位相对于对象追踪点指定方向和距离的点。 图(一)中圆心的定位方法: 1)启动(指定圆心、半径)画圆命令; 2)移动光标到L2的中点稍作停留,将中点设置成对象追踪点; 3)沿中点向上移动光标,以指示方向; 4)输入距离13,圆心即可正确定位。 2. TK方法 追踪(命令:tk):可指定一系列临时点,每个点均自上一点偏移。 图(一)中圆心的定位方法: 命令: _circle 指定圆的圆心或 [三点(3P)/两点(2P)/相切、相切、半径(T)]: tk //启动画圆命令后,再输入tk追踪,
第一个追踪点: //单击红色标识点作为第一个临时追踪点 下一点 (按 ENTER 键结束追踪): 20 //向第一个临时追踪点右方移动光标,输入偏移距离20,确定第二个临时追踪点 下一点 (按 ENTER 键结束追踪): 13 //向第二个临时追踪点上方移动光标,输入偏移距离13,确定第三个临时追踪点 下一点 (按 ENTER 键结束追踪): //按 ENTER 键结束追踪,距离红色标识点(@20,13)处的点被选中作圆心 指定圆的半径或 [直径(D)]: 6 //输入半径,回车完成
人脸自动定位算法设计的开题报告
毕业设计开题报告人脸自动定位算法设计 学院:电子工程学院 班级:电信0801 学生姓名:兰效晨 指导教师:何瑾 职称:讲师 2010 年11月22日
毕业设计开题报告
一、研究目的: 随着社会的不断进步以及各领域对快速有效的自动身份验证技术的迫切需求,生物特征识别技术在近几十年中得到了飞速的发展。生物特征识别技术是指通过计算机利用人体固有的生理或行为特征来进行身份识别和鉴定的科学,作为人的一种内在属性,并且具有很强的自身稳定性及个体差异,生物特征成为了自动身份验证的最理想依据。经过数十年的研究,生物特征识别在不同的领域获得了不同程度的成功,基于各种生物特征识别技术的身份识别系统具有更好的安全性,可靠性和有效性,正越来越受到人们的重视,并开始进入社会的各个领域。当前的生物特征识别技术主要包括有:指纹识别,视网膜识别,步态识别,静脉识别,人脸识别等。与其它识别相比,人脸识别由于具有直接,友好,方便的特点,使用者无任何心理障碍,易于为用户所接受,从而得到了广泛的研究与应用。 在人脸识别系统中,为了识别检测到的人脸,还需要进一步提取检测的人脸面部关键特征点的位置,比如眼睛,鼻子和嘴巴的位置,形状乃至整个人脸的外轮廓等信息。换句话说,就是利用计算机在一幅人脸图像或图像序列中自动的定位出人脸各个器官的准确位置。人脸自动定位可以为人脸识别,姿态表情分析,人脸跟踪等研究工作提供相应的基础数据,因而具有举足轻重的地位。 眼睛自动定位是人脸识别中一个非常重要的课题,因为与人连其他部位如鼻子、嘴巴相比,眼睛区域不仅包含了丰富的、区别于其它人的重要信息,而且是对图像进行旋转校正,归一化和均衡化的前提,同时也是人脸其他部位检测和提取的基础。 二、研究内容: 根据眼睛轮廓所具有的椭圆特性提出一种简单易行的定位算法。首先对人脸图像进行边缘提取,并对边缘上的点进行椭圆拟合,因为眼镜高和宽的比例是具有一定范围的,因此可以对椭圆的长轴和短轴设定一个阈值,已确定眼睛的候选位置,再运用支持向量机分类器粗略定位眼睛区域,最后在该区域内应用基于方向性圆形霍夫变换(Circle Hough Transform(CHT))的检测算子来定位眼球中心。 各步骤功能用途简介: 1.边缘提取为了减少计算量及背景对眼睛检测的影响,所选择的算子应具备:在所提取的边缘图像中,在包含眼睛轮廓的前提下,其它边缘点应尽可能的少。综合考虑,选择眼睛区域边缘点较丰富的Canny边缘检测算子进行边缘提取。 2.最小平方椭圆拟合椭圆拟合中最为常用的是最小平方拟合。它主要是通过找到
人脸识别技术研究背景与方法
人脸识别技术研究背景与方法 1人脸识别技术研究背景 .................................................................................... 错误!未定义书签。 1.1人脸检测技术概述 ................................................................................. 错误!未定义书签。 1.2人脸检测的研究内容 ............................................................................. 错误!未定义书签。 2 人脸检测方法 ................................................................................................... 错误!未定义书签。 2.1基于知识的方法 ..................................................................................... 错误!未定义书签。 2.2基于特征的方法 ..................................................................................... 错误!未定义书签。 2.3模板匹配 ................................................................................................. 错误!未定义书签。 2.4基于外观的方法 ..................................................................................... 错误!未定义书签。 2.5 其他方法 ................................................................................................ 错误!未定义书签。 2.6人脸检测方法评析 ................................................................................. 错误!未定义书签。1人脸识别技术研究背景 在计算机及网络技术高速发展的现代社会中,信息安全显示出前所未有的重要性。身份识别及鉴定是保证系统安全的重要前提,在国家安全、公安、司法、电子商务、电子政务、安全检查、保安监控等应用领域,都需要准确的身份识别及鉴定。目前,个人身份鉴别主要依靠ID卡(如身份证、工作证、智能卡和储蓄卡等)和密码等手段,然而这些手段存在携带不便、容易遗失、由于使用过多或不当而损坏、密码易被遗忘和破解等诸多问题。由于技术的发展,犯罪分子伪造假证件的手段越来越高明,如假身份证、假工作证、假文凭等在现实社会中也不时发生;在信息界,黑客攻击别人的计算机系统,破译计算机口令亦常有之。美国每年在福利发放、信用卡交易、移动电话以及ATM交易方面由于身份诈骗而造成的经济损失高达60亿美元。因此,目前广泛使用的依靠证件、个人识别号码(PIN)、口令等传统方法来确认个人身份的技术面临着严峻的挑战,已不能适应现代科技发展和社会进步的需要。 人们希望有一种更加方便可靠的办法来进行身份鉴别,生物特征识别技术给这一愿望带来了实现的可能。早在古埃及时人们就开始通过人体生物特征的测量(如人脸、人手等)来鉴别人的身份;在刑侦领域,人们也早已使用最有效的人体生物特征之一—指纹来确定罪犯。人们可能会遗忘或丢失他们的卡片或密码,但绝不会遗忘或者丢失自己的生物特征,如人脸、指纹、虹膜、掌纹等。因此基于生物特征识别技术的个人身份识别系统具有更好的安全性、可靠性和有效性,正越来越受到人们的重视,并开始进入人们社会生活的各个领域,迎接新时代的挑战。美国政府在“9.11”事件以后连续签署了三个国家安全法案,要求采用生物识别技术。2003年6月,联合国国际民用航空组织公布了其生物技术的应用规划,将
深水条件水下帷幕灌浆钻孔定位方法研究
31 深水条件水下帷幕灌浆钻孔定位方法研究 王雍1,钟久安2,袁永定1,张五泉1 (1.国家电投云南国际电力投资有限公司,云南 昆明 650228; 2.北京振冲工程股份有限公司,北京 100102) 摘 要:介绍某水电站深水条件下水下帷幕灌浆钻孔定位的方法及通过制定严格的水下操作规程,进行潜水试验步聚,所有帷幕灌浆钻孔定位精度和施工质量满足规范标准要求,在高程962m 水位下,坝后渗漏量从灌浆前的290L/s 下降到102L/s,深水条件下帷幕灌浆成效明显。深水条件下钻孔定位精确的基础是必须建立稳固的水面作业平台。关键词:深水;帷幕灌浆;钻孔定位 中图分类号:TV543 文献标识码:B 文章编号:1006-3951(2016)05-0031-03DOI:10.3969/j.issn.1006-3951.2016.05.008 收稿日期:2016-04-08 科技项目:高面板堆石坝绕坝渗漏综合治理研究项目(CP1201602) 作者简介:王雍(1969),男,湖南邵阳人,高级工程师,工学硕士,主要从事水电工程设计与建设管理。 * 云南水力发电 YUNNAN WATER POWER 第32卷第5 期1 研究背景 云南省某水电工程以发电为主,工程等别为Ⅱ等大(2)型工程,拦河坝为混凝土面板堆石坝,最大坝高约144m。工程于2013年12月开始蓄水,蓄水后坝后量水堰渗漏量较大。为此,对左、右岸大坝趾板采取新增帷幕灌浆处理,其中大部分灌浆需要在水下施工,施工期间库水位控制在高程961~963m 之间,最大施工水深约53m。水深超过50m 环境下实施水下帷幕灌浆存在许多技术难题,动水条件下灌浆、钻孔定位[1]、深水作业等施工工艺难度大[2],国内类似工程很少见,针对这一工程问题开展系列施工技术研究,取得多项成果并成功应用于工程实际。 2 水下钻孔定位的难点和实现 水下帷幕灌浆钻孔孔位的准确性直接影响到帷幕是否能够达到设计要求,发挥应有的截水防渗功能;同时,由于大坝趾板宽度有限,为了避免新增帷幕灌浆钻孔定位不准确,造成对大坝趾板原防渗体系的破坏,故对新增钻孔需要精准定位钻进,才能保证新增帷幕灌浆质量。通过现场对水下精确定位多种方案的比较研究,克服了许多的技术困难[3],取得了技术成功。 2.1 深水下潜水作业 水深超过50m 进行水下潜水作业已经属于空气潜水的极限,虽然能够下潜至该深度,但是水下作业时间仅允许10min 左右,而减压时间却需 要60min,甚至更长[4],大量持续的水下作业对潜水员工作要求高。现场施工时需要进行55m 深水空气潜水试验,做好各项保护措施。 2.2 深水下定位测量 水下钻孔首先要解决的是将孔位坐标测放至大坝趾板开孔位置,开孔位置位于深水下,定位难度大,无法直接测出孔位。可以先将孔位坐标测放到已经固定好的水面作业平台上,在平台上通过测量绳、钻杆导引至水下,水下再由潜水员通过潜水表确定大致水深,确定钻孔大致位置,再通过水工结构物轮廓线进行精确测量定位钻孔。2.3 深水下淤积严重。 由于工程已蓄水运行较长,水下帷幕灌浆作业面已沉积大量泥沙堆积物,淤积厚度严重时超过3m 厚,大大增加了钻孔定位的难度。可以通过潜水员在水下先使用高压水对淤积覆盖层进行冲击清理[5],再采用跟管钻进的方式,钻进穿过淤厚积覆盖层。 2.4 钻孔作业面为倾斜面 大坝趾板面一般为斜面,在斜面上直接开孔时钻头容易偏移,造成开孔段孔斜控制难度大。需要潜水员水下先进行定位钢筋施工,后续开孔时,由潜水员指挥将钻具套至定位钢筋中,再开孔钻进。 3 深水下钻孔定位方法及步骤 按照水下淤积覆盖层厚度,分水底积淤能清
基于PCA的人脸识别算法研究毕业论文
基于PCA的人脸识别算法研究毕业论文 目录 摘要 .................................................. 错误!未定义书签。Abstract .............................................. 错误!未定义书签。第1章绪论 .. (1) 1.1选题背景及意义 (1) 1.2国外研究现状 (2) 1.2.1 国外研究现状 (2) 1.2.2 国研究现状 (3) 1.3人脸识别技术的研究容与技术难点 (3) 1.3.1 人脸识别技术研究容 (3) 1.3.2 人脸识别技术研究难点 (3) 1.4本文研究容与结构安排 (4) 第2章人脸识别相关技术介绍 (5) 2.1系统概述 (5) 2.2人脸识别主要技术 (5) 2.2.1 二维人脸识别算法介绍 (5) 2.2.2 三维人脸识别算法介绍 (6) 2.3常用的人脸图像库 (6) 2.4人脸的特征提取 (7) 2.4.1 几何特征提取法 (7) 2.4.2 代数特征提取法 (8) 2.5本章小结 (10) 第3章基于PCA的人脸识别算法 (12) 3.1引言 (12) 3.2K-L变换 (12) 3.2.1 K-L变换原理 (13) 3.2.2 K-L变换性质 (14)
3.3SVD定理 (15) 3.4距离的计算 (17) 3.5基于PCA的人脸识别 (18) 3.5.1 人脸的表示 (18) 3.5.2 特征脸空间的构造 (18) 3.5.3 特征提取 (19) 3.5.4 人脸识别 (20) 3.6MATLAB仿真实现 (20) 3.7结果分析 (26) 3.8本章小结 (28) 第4章与基于Fisherface方法的特征提取原理对比 (29) 4.1PCA方法的优缺点 (29) 4.2基于Fisherface法的人脸特征提取理论介绍 (29) 4.3FisherFace方法的优缺点 (31) 4.4两种方案的理论对比 (31) 4.5本章小结 (32) 结论 (33) 参考文献 (34) 致谢 (36) 附录 1 (37) 附录 2 (44) 附录 3 (48) 附录 4 (57)
高精度快速定位技术与算法
高精度快速定位技术与算法 RTK (Real Time Kinematic)技术是GPS实时动态定位技术,它将GPS与数传技术相结合,实时解算并进行数据处理,在 1~ 2s 的时间里得到高精度的位置信息。 常规 RTK技术是一种对动态用户进行实时相对定位的技术,该技术也可用于快速静态定位。进行常规RTK工作时,基准站需将自己所获得的载波相位观测值 (最好加上测码伪距观测值)及站坐标,通过数据通信链实时播发给在其周围工作的动态用户。于是这些动态用户就能依据自己获得的相同历元的载波相位观测值 (最好加上测码伪距观测值)和广播星历进行实时相对定位,并进而根据基准站的站坐标求得自己的瞬时位置。为消除卫星钟和接收机钟的钟差,削弱卫星星历误差、电离层延迟误差和对流层延迟误差的影响,在 RTK中通常都采用双差观测值。 RTK技术是建立在流动站与基准站误差强相关这一假设的基础上的。当流动站离基准站较近 (例如不超过 1 0~ 1 5km)时,上述假设一般均能较好地成立,此时利用一个或数个历元的观测资料即可获得厘米级精度的定位结果。然而随着流动站和基准站间间距的增加,误差相关性将变得越来越差。轨道偏差,电离层延迟的残余误差和对流层延迟的残余误差项都将迅速增加。从而导致难以正确确定整周模糊度,无法获得固定解。 这项技术始于2 0世纪 90年代初,极大地拓展了GPS的使用空间,代表着高精度GPS的最高水平。但是RTK技术有着一定局限性,当流动站和基准站间的距离大于 50 km时,常规 RTK的单历元解一般只能达到分米级的精度,使其在应用中受到限制: 1. 用户需要架设本地的参考站 2. 误差随距离增长 3. 误差增长使流动站和参考站距离受到限制 4. 可靠性和可行性随距离降低。 在这种情况下为了获得高精度的定位结果就必须采取一些特殊的方法和措施,于是网络 RTK技术便应运而生了。 VRS(Virtual Reference Station)是虚拟参考站,代表GPS网络 RTK技术。它的出现使一个地区的所有测绘工作成为一个有机的整体,扩展了 RTK的作业范围,使GPS的应用更广泛,精度和可靠性也进一步提高。
电子设计作品-全资料语音导游机
应用MSP50C30设计电子语音导游机 作者:空军工程大学电讯工程学院樊昌周郭英李宏伟来源:《国外电子元器件》 摘要:文章在简要介绍了MSP50C30的结构和特性的基础上,给出了利用M SP50C30设计电子语音导游机的硬件电路和软件编程方法。 关键词:MSP50C30 MELP算法语音合成电子导游机 1 概述 随着我国经济的发 展,旅游业也获得了长足 的发展,节假日外出旅游 已成为人们的首选,对大 多数零散游客来说,希望 有一种不受制于人的辅助 导游手段,迫切需要一种 携带方便、存储容量大且 不会机械磨损的电子语音 导游机(简称导游机),但 目前市场上已在使用的导 游机,要私体积大,不便 于携带;要么容量不够, 放音时间有限,因此制约 了其应用和推广。要实现 较长时间的数字放音有两 种方式:一是扩大存储空 间,但无限扩大存储空间 必增加系统成本,二是采 用语音压缩方法来降低数 据量。其于上述两种方法, 笔者选用了TI公司新近 推出的语音合成芯片MSP 50C30并采和MELP语音压缩算法,通过外接64M位存储器对语音信号进行了压缩存储和合成。经过这样处理合成后的语音音质良好,放音时间可长达6小时左右,且该机体积很小,较好地解决了上面所提到的问题。 2 MSP50C30的结构特点 MSP50C30是TI公司1998年推出的一款功能强大的语音合成芯片,其内部集成了8位微处理器、双通道语音合成器、RAM、ROM、I/O端口等功能模块。
其中微处理器利用其专用的61条指令可完成数字运算、逻辑功能和控制功能;语音合成器则利用其内部集成的12阶格型滤波器,采用LPC压缩算法来合成高质量的语音。在进行语音合成时,微处理器从内部RAM或外部ROM中读取语音数据进行译码,然后将译码后的语音数据送到语音合成器,语音合成器对译码数据进行插值计算并合成语音,再通过D/A变换后送到功放直接驱动扬声器发声。 表1 MSP50C30引脚说明 管脚名称管脚说明 DAC+ D/A输出 DAC- D/A输出 ID0ID7 数据输入端口 INIT 初始化输入(复位) OSC IN 时钟输入,使用内部时钟接地 OSC OUT 时钟返回,使用内部时钟时,作用PBI的I/O口 OA0OA22 23位外部存储器地址线64M bit PA0PA7 8位双向I/O口 PB0PB7 8位双向I/O口 PC0PC7 8位双向I/O口 PD0PD3 4位双向I/O口 VDD 5V电压输入 VSS 地 另外,MSP50C30内部集成有晶体振荡器,可提供系统所需的时钟。 MSP50C30引脚图如图1所示,管脚说明如表1所列。MSP50C30的主要特