第五章 雷达接收机(3)
第五章 雷达定位与导航

第二节 雷达干扰和假回波
一、雷达干扰 船用导航雷达的荧光屏上除了显示实际物 标的回波外,还会显示一些干扰杂波,影 响正常的雷达观测。这些干扰杂波主要是 海浪干扰、雨雪干扰、同频雷达干扰、电 火花干扰以及明暗扇形干扰等,面简单介 绍它们的特点及抑制的方法。
1.海浪干扰
海浪反射雷达波产生的干扰杂波称为海浪干扰。 其特点是: (1)近处海浪回波非常强,但随着距离的增加, 强度按距离的指数规律(1/R4)急剧减弱。一般 风浪时,海浪干扰范围可伸展到6—8 n mile, 大风浪时可达8—10n mile。 (2)海浪干扰的强度还与相对风向有关,上风 舷强且伸展得远。 (3)海浪干扰的特征是在扫描中心周围呈鱼鳞状 亮斑,而风浪大时会变成辉亮实体,淹没其中 的弱小物标回波。幅度较大的长涌,可在屏上 见到一条一条的浪涌回波。
第五章 雷达定位与导航
雷达定位就是用雷达测出物标的距离和/ 或方位,在海图上作图求出自己的船位。
要船位准确就要做到: (1)物标要认得准、选得合适; (2)测量方法要正确; (3)测量数据要准; (4)测量速度要快
第一节 物标的雷达图像
雷达是用以一定速度(15—30r/min)匀速顺时针 旋转的定向天线向外发射具有一定宽度的 (o.05—2 us)超高频无线电脉冲波并定向接收从 物标反射回来的回波,由显示器根据电波从天线 至物标间往返所经历的时间计算的距离及接收天 线送来的方位信号,以加强亮点的方式在荧光屏 上显示物标的相对于本船的距离和方位。因此, 物标的雷达图像不同于物标实际的形状。也不同 于海图上标志的形状。主要区别有如下几个方面:
一、雷达图像是平面位置图像 从雷达的工作原理可知,在雷达荧光屏上显示的 是物标相对于本船 ( 天线 ) 的方位和距离,不能显 示物标的高度、厚度和水下的深度。如图5—1— 1所示的小岛,雷达显示屏上仅显示小岛迎向雷达 天线一侧各点相对于天线的方位、距离的回波亮 点的组合,它的形状近似于小岛迎向天线一侧侧 面在与天线高度相等的水平面上的垂直投影面形 状。
大气科学概论第五章气象雷达
径向速度特征:由于降水范围大,因而径向速度场范围分布的 范围也大,等值线分布比较稀疏,切向梯度不大,在零径向速 度线两侧分布着范围较大且数值不大的正负中心,另外还常存 在流场符合或辐散区。
对流云阵性降水——块状回波(1)
▪ 气象回波——气象目标物对雷达电磁波的散射或反射引
起的回波。
降水回波 非降水回波
非气象回波
▪ 地物回波
特点:回波边缘特别清晰,位置固定不变,且回波和地物 所在的位置是一致的。
常用的识别方法
比较法:地物回波强度很大,位置固定不变,而降水回波则不 是;
PPI探测时改变天线仰角识别法 RHI探测法识别
平面位置显示器(PPI)
平面位置显示 器是天气雷达应用 得最多显示器,简 称平显,也叫PPI (Plan Position Indicator)。
当天线仰角为 00,天线围绕铅直 轴转动时,平面位 置显水器表示的是 波束扫描平面上的 降水分析。
距离高度显示器(RHI)
为了了解云、雨的形成和垂直结构情况,在天气雷达上还 有一种常用的显示器——距离高度显示器。距离高度显示器简 称高显或RHI(Rang Height Indicator)。在高显中,横坐标表 示云、雨目标的斜距,纵坐标是云雨目标的高度。
▪ 对流云阵性降水包括阵雨、雷雨、冰雹、暴雨等; ▪ 一般出现在快速移行锋面上、冷锋前暖区、气团内部、副高边缘、
台风外围等; ▪ 持续时间在十几到几十分钟,平均约20-30min(与单体的尺度大
小有关); ▪ 回波强度特征
PPI回波特征 通常由许多的分散的回波单体组成,随不同天气过程排列成带状、条装、 离散装或其他形状; 回波单体结构紧密、边界清晰、棱角分明,强度大,持续时间变化大,单 体水平尺度在几到几十公里,回波单体中包含许多尺度更小的回波泡;
雷达原理雷达接收机PPT课件
雷达接收机的组成
低噪声放大器的主要指标
1、噪声系数(Noise Figure):输入信号与输出信号的信 噪比(SNR)之比。 NF=(SNR)in/(SNR)out 通常情况下,它是以分贝为单位的。 2、增益(Gain):负载吸收功率与信源资用功率之比。 3、带内平坦度(Gain Flatness):通带内最大增益与最 小增益的差值。 4、驻波比(Standing Wave Ratio):最大电压与最小电 压之比。 5、输出功率(Power Out)
14
雷达接收机的组成 (一)关于低噪声放大器
低噪声放大器(Low Noise Amplifier,简称LNA)是射频接 收机前端的主要部分。 它主要有以下几个特点: 1、处于接收机的前端就要求它的噪声系数越小越好。 为了抑制后面几级噪声对系统的影响,还要求有一定的 增益,为了不使后级器件过载,产生非线性失真它的增 益又不能太大。在此放大器在工作频段内应该是绝对稳 定的。
17
雷达接收机的组成
具体指标在实际中的应用:
在实际应用中,为了有足够的增益,放大器通常是 若干级放大管(或模块)级联而成,即由单个的放大管 组成一个低噪声放大器。那么,在设计之初这个低噪声 的放大器的一些指标就得通过一定公式来计算得到。
下面以噪声系数为例,给出级联后的噪声系数的计算
公式:
F
F1
上次课作业
2、在什么情况下选用主振放大式发射机?在什么情 况下选用单级振荡式发射机? 解: 对发射信号的频率、相位和谱纯度任一参数有较高要 求的情况下选用主振放大式发射机,3 参数均无较高 要求的情况下选用单级振荡式发射机。
上次课作业
3、用带宽为 10Hz 的测试设备测得某发射机在距主 频 1KHz 处的分布型寄生输出功率为 10μ W,信号 功率为 100mW,求该发射机在距主频 1KHz 处的频 谱纯度。
雷达原理与系统知识要点总结(必修)

成绩构成:平时20%(原理10%+系统10%,含考勤和课堂测试),期中30%,期末40%,课程设计10%。
雷达原理与系统(必修)知识要点整理第一章:1、雷达基本工作原理框图认知。
2、雷达面临的四大威胁3、距离和延时对应关系4、速度与多普勒关系(径向速度与线速度)5、距离分辨力,角分辨力6、基本雷达方程(物理过程,各参数意义,相互关系,基本推导)7、雷达的基本组成(几个主要部分),及各部分作用第二章雷达发射机1、单级振荡与主振放大式发射机区别2、基本任务和组成框图3、峰值功率、平均功率,工作比(占空比),脉宽、PRI(Tr),PRF(fr)的关系。
第三章接收机1、超外差技术和超外差接收机基本结构(关键在混频)2、灵敏度的定义,识别系数定义3、接收机动态范围的定义4、额定噪声功率N=KTB N、噪声系数计算及其物理意义5、级联电路的噪声系数计算6、习题7、AGC,AFC,STC的含意和作用第四章显示器1、雷达显示器类型及其坐标含义;2、A型、B型、P型、J型第五章作用距离1、雷达作用距离方程,多种形式,各参数意义,PX=?Rmax=?(灵敏度表示的、检测因子表示的等)2、增益G和雷达截面A的关系2、雷达目标截面积定义3、习题4、最小可检测信噪比、检测因子表示的距离方程5、奈曼皮尔逊准则的定义6、虚警概率、检测概率、信噪比三者关系,习题.(会看图查数)由概率分布函数、门限积分区间表示的各种概率形式;6.5 CFAR●什么是CFAR●慢变化CFAR的框图和原理●快变化CFAR的框图和原理,(左右平均、左右平均选大)●CFAR的边缘效应,图及分析7、为什么要积累,相参积累与非相参积累对信噪比改善如何,相参M~M倍。
8、积累对作用距离的改善,(方程、结论、习题)9、大气折射原因、直视距离计算(注意单位Km还是m)10、二次雷达方程、习题。
11、分贝表示的雷达方程,计算、习题,普通雷达方程的计算。
第六章距离测量1、R,tr,距离分辨力、脉宽、带宽关系2、最短作用距离、最大不模糊距离与脉宽、重频关系3、双重频判距离模糊、习题。
雷达原理与对抗技术习题答案
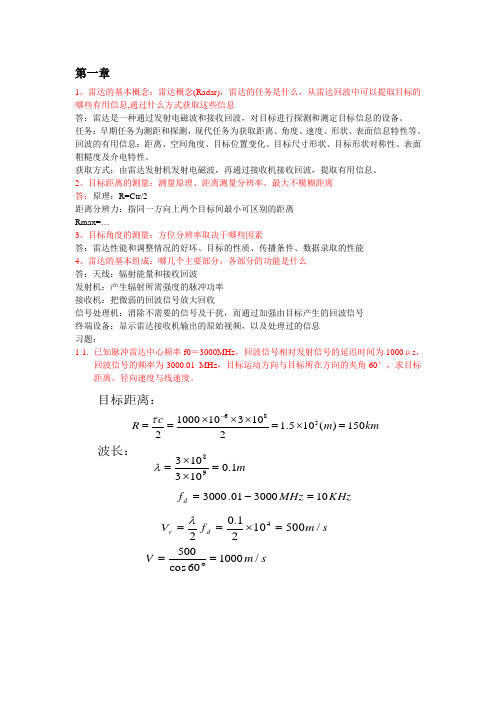
第一章 1、雷达的基本概念:雷达概念(Radar),雷达的任务是什么,从雷达回波中可以提取目标的哪些有用信息,通过什么方式获取这些信息 答:雷达是一种通过发射电磁波和接收回波,对目标进行探测和测定目标信息的设备。 任务:早期任务为测距和探测,现代任务为获取距离、角度、速度、形状、表面信息特性等。 回波的有用信息:距离、空间角度、目标位置变化、目标尺寸形状、目标形状对称性、表面粗糙度及介电特性。 获取方式:由雷达发射机发射电磁波,再通过接收机接收回波,提取有用信息。 2、目标距离的测量:测量原理、距离测量分辨率、最大不模糊距离 答:原理:R=Ctr/2 距离分辨力:指同一方向上两个目标间最小可区别的距离 Rmax=… 3、目标角度的测量:方位分辨率取决于哪些因素 答:雷达性能和调整情况的好坏、目标的性质、传播条件、数据录取的性能 4、雷达的基本组成:哪几个主要部分,各部分的功能是什么 答:天线:辐射能量和接收回波 发射机:产生辐射所需强度的脉冲功率 接收机:把微弱的回波信号放大回收 信号处理机:消除不需要的信号及干扰,而通过加强由目标产生的回波信号 终端设备:显示雷达接收机输出的原始视频,以及处理过的信息 习题: 1-1. 已知脉冲雷达中心频率f0=3000MHz,回波信号相对发射信号的延迟时间为1000μs,回波信号的频率为3000.01 MHz,目标运动方向与目标所在方向的夹角60°,求目标距离、径向速度与线速度。
6851000103101.510()15022cRmkm
m1.010310398KHzMHzfd10300001.3000smfVdr/5001021.024
smV/100060cos500
波长:目标距离: 1-2. 已知某雷达对σ=5m2 的大型歼击机最大探测距离为100Km, 1-3. a) 如果该机采用隐身技术,使σ减小到0.1m2,此时的最大探测距离为多少? 1-4. b) 在a)条件下,如果雷达仍然要保持100Km 最大探测距离,并将发射功率提高到10 倍,则接收机灵敏度还将提高到多少?
第 5 章 雷达作用距离

程,
1/4
1/4
Rmax(4)3kT P0 tG Bn2F n2N Somin
Pt Ar2
42kT0BnFnN Somin
(5.2.6)
第 5 章 雷达作用距离
当用(5.2.4)式的方式, 用信号能量
Et
(4)3kT0FnBn
Bn Bn
D0
(4)P3ktTG0FtGnD r02LCB1/4
Rmax (4)2kETt0GFtnADr0LCB1/4
1
Bn
(5.2.7)
上式中增加了带宽校正因子CB≥1, 它表示接收机带宽失配所带 来的信噪比损失, 匹配时CB=1;L表示雷达各部分损耗引入的损 失系数。
第 5 章 雷达作用距离
“等效” 是指该球体在接收机方向每单位立体角所产生的功 率与实际目标散射体所产生的相同, 从而将雷达截面积理解为 一个等效的无耗各向均匀反射体的截获面积(投影面积)。因为 实际目标外形复杂, 它的后向散射特性是各部分散射的矢量合 成, 因而不同的照射方向有不同的雷达截面积σ值。
散射特性。若假定目标可将接收到的功率无损耗地辐射出来,
则可得到由目标散射的功率(二次辐射功率)为
第 5 章 雷达作用距离
P2 S1 4PtGRt2
(5.1.2)
第三章雷达接收机
4.中频的选择和滤波特性
中频选择与发射波形特性、接收机的工 作带宽、所能提供的高频部件和中频部 件的性能有关。一般在30M-500MHz
滤波特性---是减小接收机噪声的关键 输出信噪比最大化---匹配滤波
5. 接收机的噪声系数
接收机的噪声来源
若用对数表示,则称为增益
G=20lgK 雷达接收机的电压放大倍数一般为 106~109 倍 相应的增益为120-180dB
3. 动态范围
定义:接收机能够正常工作所容许的输入信号 强度变化范围。
在接收机内部噪声电平一定的条件下,信 号太弱便不能检测;信号太强,接收机会发生 饱和过载,使目标回波显著减小,甚至丢失。
kT0 BnGa
N F 1 kT0BnGa
关于接收机噪声系数的几点说明
1. 噪声系数只适用于接收机的线性电路和准 线性电路。(非线性电路,需要考虑输出信号 与噪声的交叉项)
2. 为使噪声系数具有单值确定性,规定输入 噪声以天线等效电阻在室温290K时产生的 热噪声为标准。噪声系数只由接收机本身 参数确定。
能检测的信号越微弱, 则接收机的灵敏度越高, 因而雷达的作用距离就越远。
1/ 4
Rmax
PtGA
(4π)2 Simin
1. 灵敏度
能
信号
量
目标距离
能
信号
量
目标距离
如果不存在噪声,则不管目 标回波有多小,理论上都能 够检测到。
噪声 但实际系统都不可避免地存 在噪声,因此接收机的输入 信号功率如果低于噪声水平, 目标就会完全淹没在噪声中, 从而不可能被可靠地检测出 来。
哈工大—雷达对抗第5章—雷达干扰技术

遮盖性干扰
5.3.2最佳遮盖干扰波形
• •
最佳干扰波形就是随机性最强或不确定性最大的波形。 在限制平均功率的情况下,熵最大的最佳遮盖干扰波 形为正态分布的噪声。 熵定义为H ( x) p ( x) log a p ( x)dx
p ( x)dx 1 条件 x 2 p ( x)dx 2
電子工程技術研究所
遮盖性干扰
5.3遮盖性干扰
•
• •
有源干扰按干扰信号的作用机理可分为:遮 盖性干扰和欺骗性干扰 前面分析的干扰方程一般形式主要针对的就 是单站雷达的遮盖性有源干扰 遮盖性干扰就是用干扰信号淹没有用信号, 阻碍雷达检测目标信息,实际就是降低信噪 比以在恒虚警检测中降低发现概率。
電子工程技術研究所
2 2
2
有效干扰扇面 j 2 2
Pj G j Gt
4 k j Rt 2 0.5 PG Kj t t Rj
電子工程技術研究所
干扰方程
干扰在目标上时有效干扰扇面要求
•
有效干扰扇面是指在最小干扰距离上干扰能压制 信号的扇面,在此扇面内雷达不能发现目标。
電子工程技術研究所
概述
干扰分类方法
•
• • •
能量来源:有源(Active),无源(Passive) 产生途径:有意干扰,无意干扰 作用机理:遮盖性干扰,欺骗性干扰 空间位置:远距离支援干扰(SOJ, Stand off Jam
ming),随队干扰(ESJ, Escort Jamming) ,自卫 干扰(SSJ, Self Screening Jamming) ,近距离干 扰(SFJ, Stand Forward Jamming)