机器人轨迹跟踪误差
不确定性机器人轨迹跟踪控制的粒子群算法

设 计 控 制 器 时 , 需要 对 建 立 的 机 器 人 动 力 学方 程 进 行参 数 线性化 处 理 ,同时 ,需 要大 量计 算 用 以 确 定 回归 矩 阵 ,方 法 实现 时 计 算 量 较 大 。为 简化
迭 代 的 进化 计算 技 术 ,它 是 通过 模 拟 鸟 类 结 成 群
体 捕 食 行 为 的优 化 算 法 ,可 以 用 于研 究 复杂 受控
对 象 的 优化 计 算 问题 。同 时 ,粒 子 群 算 法 原 理 简 单 , 没 有 遗 传 算 法 的 交 叉 和 变 异 等 复 杂 进 化 过 程 ,只 是模 拟 成 鸟 类 的 多 个粒 子 在 解 空 间 内追 寻
的 不 确 定性 因素 ,实 现 机 器人 系统 运 动 轨 迹 跟 踪 的 良好 控制 。首 先 ,对 机 器人 系统 进 行 动 力 学 建 模 ,提 出 了控 制 器 的 设 计 方 法 , 针对 其 系统 中存
动 时存 在 诸 多 的不 确 定 性 。一 般 来 说 ,用 经典 的
控制方法u 如 计 算 力 矩 法 实现 机 器 人 运 动 时 ,往 往 存 在 较 大 的运 动 误 差 ,难 以 得 到 期 望 的运 动 轨 迹 。针 对这 一 问题 ,有 学者 引入 自适 应控 制方 法口 J
搜 索 功 能 、优 化 效 率 高和 算 法 实 现 简单 等优 点 , 已广 泛 应 用 于 智 能 计算 、 自动 控 制 、机 器 人 学等
领域 ,成 为解决 复 杂优化 问题 的一 种新方 法 。 本 文 利 用粒 子 群 算 法 的进 化 学 习功 能 ,设 计 了相 应 的 学 习控 制 器 来 消 除机 器 人 动 力 学 系 统 中
煤矿救援机器人轨迹跟踪研究
asymptotic stability can be achieved by the feedback control law.
· 46 ·
机床与液压
第 4O卷
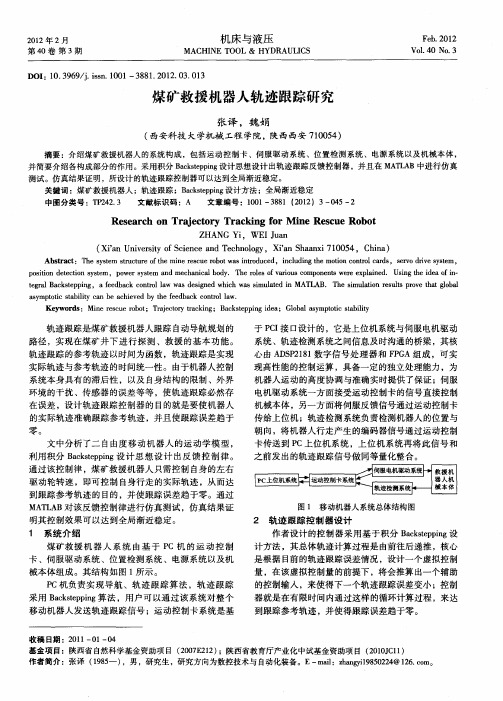
下 面是该控制器 的具体设计过程 。 使用 两个直 角坐标 系来对 机器人模 型进 行分 析 , 这 两个直 角坐标 系分别是 :以二维平面某 一点为原点 的全局坐标 系 xOy;固定 于机器人本身 的局部 坐标系 0~Y (该坐标系横轴正方 向始终 与机器人朝 向相一 致 )。机器人模型如 图 2所示 ,为独立 驱动式移 动机 器人 ,全局坐标系 (xOy)下 的坐标 ( ,Y)为机器 人 的位置 , 轴正方 向到移动机器人 正前方 向的角度 0为机器人 的朝 向。两驱动轴之 间 的距离 为 R,每个 驱动轮 的半径为 r,左驱 动轮的转速 为 n.,右驱 动轮 的转速为 n ,机器 人运 动时 的车体 瞬 时半径 为 P, 和 ∞分别为机器 人在 局部 坐标 系下 的线速 度和 角速 度 。
收 稿 日期 :2011一O1—04 基 金项 目 :陕西省 自然科学基金资助项 目 (2007E212);陕 西省教育厅产业化 中试基金资助项 目 (2010JC11) 作 者简 介 :张译 (1985一 ),男 ,研究生 ,研究方向为数控 技术 与 自动化装备 。E—mail:zhangyi19850224@126.tom。
(4)空投 着 陆是一个 复 杂 的过 程 ,而 且要 受 到 地形 、气象 、风速等诸多因素的影响。因此 ,为 了实 现对气 动人工肌 肉的准确伺服控制.就必须针对具体 的应用对象对 气动 人工 肌 肉进 行 建模 。McKibben气 动人工 肌肉由于具有非线性 、时变特性 ,并且在工作 时伴 随有迟滞现象 ,因而难 于对 其进行 建模 和控制 。 大多数 已有研究 中对 于 McKibben气 动人工 肌 肉的建 模都采用 Chou和 Hannaford基 于虚功原理给 出的理论 模型。此模型给 出了肌 肉出力的理想估计 ,然而此理 论模 型直接应用于实 际控制并不 能得 到 良好 的效果 。 因而 ,能否建立正确的气动人工 肌肉模 型也是研究 的 关键 。 参考 文献 : 【1】臧克 江,郭艳玲 ,马岩.编织 型气 动人工肌 肉几何特性研
机器人焊缝跟踪标定方法

机器人焊缝跟踪标定方法我折腾了好久机器人焊缝跟踪标定方法,总算找到点门道。
说实话,这事儿一开始我也是瞎摸索。
我就知道,要让机器人能精确地沿着焊缝走,这个标定可太重要了。
最开始我觉得,这肯定就是把机器人的一些参数按照手册上给的标准值设好就行了呗。
我就对着那手册一阵摆弄,给机器人的视觉系统设置各种分辨率啊,对焦距离之类的参数,可搞完后发现,机器人追踪焊缝的时候,那轨迹歪得不像样。
后来我又想,会不会是坐标的问题呢?于是我就开始尝试去标定焊接工作区域的坐标。
我在工作台上到处找参考点,拿了个尺子量来量去的,还做记号,就像小时候做手工课一样认真。
那时候我就觉得,这每一个点就像地图上的宝藏位置,要精确定位才行。
我把这些点的坐标值输入到机器人系统里面,本以为这次行了,结果呢,机器人开始焊接的时候还是有些偏差。
又有一次,我就想是不是得根据焊缝的类型来标定啊。
我就找了不同形状的焊缝来试验,像那种直线焊缝我就觉得好标定一点,我先让机器人沿着焊缝大概扫描一次,就好像是个士兵先探探路一样,然后根据这个扫描结果来调整标定参数。
可是遇到那种弯弯扭扭的焊缝就不行了,那些参数感觉完全乱套了。
不过我没有放弃,还继续捣鼓。
后来我发现,在考虑所有外在因素之前,必须要先保证机器人传感器是干净准确的。
有时候传感器上有一点灰尘或者小划痕,就会让采集的数据出现大偏差。
就像你的眼睛被灰尘眯住了,看东西肯定不清楚。
我就开始每次标定之前,都仔细清理传感器,然后再进行下面的步骤。
还有就是对于robots 的运动学模型必须要非常清楚。
我一开始根本没重视这一点,以为只要把传感器和外部参数调好就行了。
后来我专门花时间去研究机器人各个关节的运动范围和可能出现的误差。
这就像你要知道一个人的手脚能伸展到什么程度,动作的时候可能哪里会失误一样。
我根据这个运动学模型重新精确校准了一些基础参数之后,总算在焊缝跟踪标定上取得了一点成功。
之后再慢慢调整和优化其他的参数,像视觉系统里图像识别的对比度、亮度这些参数,也和标定有重要关系。
机器人工程基础知识单选题100道及答案解析

机器人工程基础知识单选题100道及答案解析1. 机器人的定义是()A. 一种能够自动执行任务的机械装置B. 一种能够模仿人类行为的电子设备C. 一种能够进行复杂计算的计算机系统D. 一种能够感知环境并作出反应的智能系统答案:A解析:机器人通常被定义为一种能够自动执行任务的机械装置。
2. 工业机器人最常见的驱动方式是()A. 液压驱动B. 气压驱动C. 电动驱动D. 以上都是答案:D解析:液压驱动、气压驱动和电动驱动在工业机器人中都较为常见。
3. 机器人的运动学主要研究()A. 机器人的运动轨迹B. 机器人的速度和加速度C. 机器人的受力情况D. 机器人的能量消耗答案:A解析:运动学主要关注机器人的运动轨迹,不考虑力等因素。
4. 以下哪种传感器常用于机器人的位置测量()A. 温度传感器B. 压力传感器C. 光电编码器D. 湿度传感器答案:C解析:光电编码器能精确测量机器人的位置。
5. 机器人的控制系统中,负责计算关节运动轨迹的是()A. 传感器B. 控制器C. 驱动器D. 执行器答案:B解析:控制器承担计算关节运动轨迹的任务。
6. 机器人的精度主要取决于()A. 机械结构B. 控制系统C. 传感器精度D. 以上都是答案:D解析:机器人的精度受机械结构、控制系统和传感器精度等多方面因素影响。
7. 以下哪种机器人常用于医疗领域()A. 工业机器人B. 服务机器人C. 特种机器人D. 教育机器人答案:B解析:服务机器人在医疗领域有较多应用,如辅助手术等。
8. 机器人的编程语言中,应用最广泛的是()A. C 语言B. PythonC. JavaD. 汇编语言答案:B解析:Python 在机器人编程中应用广泛,具有丰富的库和易用性。
9. 机器人的自由度是指()A. 机器人能够到达的空间位置数量B. 机器人关节的数量C. 机器人能够执行的任务种类数量D. 机器人的运动速度答案:B解析:自由度通常指机器人关节的数量。
差速论pid轨迹跟踪
差速轮PID(比例积分微分)轨迹跟踪控制器是一种常用于机器人或自动驾驶车辆的算法,它可以通过调整轮子的转速来控制车辆的运动,以实现对预定轨迹的精确跟踪。
以下是一些关于差速轮PID轨迹跟踪的基本概念和步骤:1. 系统建模:首先需要对差速轮机器人或车辆进行建模,确定其动态特性,包括轮子速度、转向机构延迟、摩擦力等。
建立数学模型来描述车辆的运动学和解算器,这将用于后续的控制算法设计。
2. 轨迹规划:规划车辆需要跟踪的轨迹,这通常涉及到确定一系列的waypoints(航点)。
轨迹可以是简单的直线或复杂的曲线,需要根据车辆的应用场景来设计。
3. 误差计算:计算车辆当前位置与预期轨迹之间的误差。
这通常通过计算当前位置的x、y坐标和偏航角与轨迹上相应点的差异来实现。
横向跟踪误差(CrossTrack Error, CTE)是一个常用的误差指标,它表示车辆前轴中心点到最近轨迹点的距离。
4. PID控制器设计:设计PID控制器,包括比例(P)、积分(I)和微分(D)三个部分。
比例部分根据当前误差提供直接的纠正输出。
积分部分对误差进行累积,用于消除静态误差。
微分部分则根据误差的变化速率提供纠正输出,用于预测误差的趋势。
5. 控制输出:根据PID控制器的计算结果,为差速轮机器人或车辆的轮子提供转速指令。
这些指令将调整轮子的转速,以减少跟踪误差并保持车辆在规划的轨迹上。
6. 参数调优:PID控制器的参数需要根据具体的系统和任务进行调优。
通常使用如遗传算法、粒子群优化等优化技术来寻找最佳的参数设置。
7. 执行与反馈:实施控制输出,并监控车辆的实际轨迹与预期轨迹之间的差异。
不断反馈信息,PID控制器将根据这些信息调整其输出,以实现更精确的轨迹跟踪。
差速轮PID轨迹跟踪控制器的关键在于精确的系统建模、合适的PID参数设置以及实时准确的误差计算。
通过不断的调整和优化,可以使车辆在复杂环境中实现高精度的轨迹跟踪。
关节空间内工业机器人抗干扰轨迹跟踪控制
Feb. 2021Vol. 49 No. 32021 年 2 月第 49 卷 第 3 期机床与液压MACHINE TOOL & HYDRAULICSDOI : 10.3969/j. issn. 1001 — 3881. 2021. 03. 011本文引用格式:吴晓燕,虞启凯,韩江义.关节空间内工业机器人抗干扰轨迹跟踪控制[J].机床与液压,2021,49(3):52-57.WU Xiaoyan ,YU Qikai ,HAN Jiangyi. Trajectory tracking control for an industrial robot in joint space with disturbancerejection technique [J]. Machine Tool & Hydraulics , 2021,49(3) :52-57.关节空间内工业机器人抗干扰轨迹跟踪控制吴晓燕1,虞启凯1,韩江义2(1.南京科技职业学院智能制造学院,江苏南京210048;2.江苏大学汽车与交通工程学院,江苏镇江212013)摘要:针对工业机器人在关节空间内轨迹跟踪精度差和易受集总干扰影响等问题,提出一种基于非线性扰动观测器的 快速连续非奇异终端滑模控制策略。
根据拉格朗日方程推导出四轴工业机器人的动力学模型,获得系统的输入输出关系。
引入非线性扰动观测器对集总干扰进行估计与补偿,设计快速连续非奇异终端滑模控制器来加快系统状态量的收敛速率, 提高关节空间内轨迹跟踪的精度。
由李雅普诺夫稳定性理论证明了此控制器的全局稳定性。
通过仿真案例与试验研究验证 了所设计控制策略的有效性,结果表明:该控制器能有效抑制集总干扰影响,保证工业机器人轨迹跟踪的精度,具有一定的工程参考价值。
关键词:工业机器人;轨迹跟踪控制;集总干扰;非线性扰动观测器;终端滑模中图分类号: TP242Trajectory Tracking Control for an Industrial Robot in JointSpace with Disturbance Rejection TechniqueWU Xiaoyan 1 , YU Qikai 1 , HAN Jiangyi 2(1. School of Intelligent Manufacturing , Nanjing Polytechnic Institute , Nanjing Jiangsu 210048 , China ;2. School of Automotive and Traffic Engineering , Jiangsu University , Zhenjiang Jiangsu 212013, China)Abstract : Aiming at the difficulty of poor trajectory tracking precision and susceptible to lumped disturbances in joint space con trol for an industrial robot , a fast-continuous nonsingular terminal sliding mode control strategy was proposed based on nonlinear dis turbance observer. The dynamical model of a 4-DOF robot was modeled by using Lagrangian equation , by which the inputs and outputsof the system were obtained. A nonlinear disturbance observer was introduced to estimate and compensate the lumped disturbances. Anda fast-continuous nonsingular terminal sliding mode controller was designed to accelerate the convergence of the system state variables ,which could improve the trajectory tracking precision in joint space. Meanwhile , the global stability of the controller was proved byusing Lyapunov theory. Some simulation cases and experiments were conducted to test the efficiency of the controller. The results showthat the proposed controller can be used to retrain the lumped disturbances and to ensure the trajectory tracking precision , which has aproject application value.Keywords : Industrial robot ; Trajectory tracking control ; Lumped disturbances ; Nonlinear disturbance observer ; Terminal slidingmode0 前言智能制造是现代工业升级的基础,随着信息技术、机器人技术、新能源、人工智能等重要领域和前 沿方向的革命性突破和交叉融合,正在引发新一轮的 产业变革°工业机器人是智能制造中的重要载体,支撑着产业发展°作为工业机器人的关键性问题之一, 关节空间内高精度轨迹跟踪控制一直是国内外学者们的研究热点与重点[1-2]°然而,机器人系统是一个强耦合、高非线性、多变量的系统,要获得高精度的轨 迹跟踪控制难度颇大°另外,系统的未建模特性、关 节摩擦间隙、外界干扰和末端未知负载等因素构成的 集总干扰也会进一步加剧设计轨迹跟踪控制器的难 度°上述问题导致机器人关节空间内抗干扰轨迹跟踪控制极具挑战性°收稿日期:2019-11-29基金项目:南京科技职业学院2019年院级科研项目(NHKY-2019-12)作者简介:吴晓燕(1979—),女,硕士,讲师,主要从事智能制造研究。
路径跟踪
1.首先研究路径跟踪(参考机器人一些算法如:基于广义预测控制器的移动机器人路径控制算法、基于模糊逻辑推理的移动机器人导航控制算法、基于模糊神经网络的机器人导航控制算法等)思路一:(1)首先建立车辆按照预定路径行驶的控制系统模型(包括控制理论的选择、控制模型的数学推导和实现、控制模型的优化和总体方案实现)(2)利用SIMULINK建模仿真(包括:控制模型的仿真建模、作业环境的仿真建模、控制算法的程序实现)(3)按照要求设计各类仿真试验,并对控制模型进行仿真试验,依据试验结果进行完善调整直到仿真曲线满意为止(4)试验研究阶段(包括建立平台调试然后将调整后的控制算法移植到试验系统的控制算法程序中去,通过被控车辆的运动轨迹对该模型进行实物试验并依据结果对模型再进行调整直到结果满意为止)(5)分析结果总结。
(以上参考中南大学硕士论文深海集矿机的路径跟踪)2.路径跟踪中的误差如何消除?(在笛卡尔坐标空间中,采用误差矢量作为系统的反馈来快速消除跟踪误差。
参考南理工硕士论文——智能车辆体系结果及路径跟踪策略的研究)3.路径跟踪中的运动控制(分开环和闭环)开环策略就是试图寻找一个有界的控制输入序列来操纵系统使其从一个初始位形到任意的期望位形。
考虑非完整约束的智能车辆系统,是一个欠驱动的非完整系统,也是一个无漂移的零动力学系统。
此类系统不能用连续可微的时不变的纯状态反馈率来予以镇定。
因此,不连续控制、事变控制以及它们的混合策略就是必然的选择。
所以为其设计一个反馈控制规律,是目前非常活跃的研究领域。
4.由于高速公路的道路曲率变化较为缓慢,利用圆弧与直线的组合拟合目标路径。
(1)利用车载传感器测量时刻的三对道路预瞄点的坐标信息,根据所预测算法获得(K+1)T时刻道路预瞄点处坐标。
(2)根据最优控制理论,设计最优反馈控制器。
(3)最后仿真结果表明:基于所提路径预测法,最优反馈控制器能确保自主车实现跟踪性能。
(参考论文——基于路径预测的自主车最优跟踪控制)。
非连续路段下移动机器人的轨迹跟踪
mo d e l a n d oa r d m o d e l o f t h e m o b i l e ob r o t , he t a c q u i s i t i o n o f t h e t r a j e c t o y r i n f o r m a t i o n nd a he t d e s i g n o f t h e c o n t r o l l e r w a s s t u d i e d .F i r s t l y t h e
A b s t r a c t : A i m i n g a t t h e t r a j e c t o r y t r a c k i n g p r o b l e m o f w h e e l e d mo b i l e r o b o t i n d i s c o n t i n u o u s s e c t i o n s , t h e e s t a b l i s h m e n t o f t h e ma t h e m a t i c l a
( 1 .I n s t i t u t e o f E l e c t i r c a l a n d Me c h a n i c a l E n g i n e e i r n g , X i a n P o l y t e c h n i c U n i v e r s i t y , X i a n 7 1 0 0 0 0 ,C h i n a ;
移动机器人的轨迹跟踪控制新方法
Fu t e mo e,t e g o a s mp o i t b l y i a a y e n a i a e . S mu a i n r s ls s o t e e r r rh r r h l b la y t t s a i t s n l z d a d v l t d c i d i l to e u t h w h r o s
o aetr rc igaec n eg d a dt eay tt tbl yo h ls dlo y tm u rne d f rjcoytakn r o v re , n h smpoi sa it f ec e psse i g aa te . t c i t o o s
Ab ta t C n iei g o h ie t s mo e f mo i o o ,t e tae t r r c ig c n r l sr c : o sd rn f t e k n ma i ’ c d l o b l r b t h r jco y ta kn o to e
移 动机 器 人 的轨 迹跟 踪 控 制新 方 法
赵 涛 , 明 雍 , 良荣 刘 周
( 北工业大学航海学 院, 安 西 西 707) 1 02
摘
要 : 对 运 动 学 模 型 描 述 的 移 动 机 器 人 系统 , 究 了 移 动 机 器 人 的轨 迹 跟 踪 控 制 问 题 , 于 L a u o 针 研 基 yp n v直 接 法 , 计 设
文献 所设 计 的控制 器过程 都相 当 的复杂 。
本文 在借 文 献 [ ,] 5 6 基础 上 , 计 了一种基 于 设
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人轨迹跟踪误差
一、引言
机器人轨迹跟踪误差是指机器人在执行预定轨迹时,实际运动轨迹与预定轨迹之间的差异。
这种误差是由多种因素引起的,包括机器人本身的特性、环境因素、传感器精度等。
机器人轨迹跟踪误差对机器人的精度和稳定性有着重要的影响,因此对其进行深入研究具有重要意义。
二、机器人轨迹跟踪误差的分类
1.位置误差:
位置误差是指机器人实际到达目标点与预期目标点之间的距离差。
位置误差通常由于机械结构刚度不足、摩擦力、惯性力等原因引起。
2.方向误差:
方向误差是指机器人实际运动方向与预期运动方向之间的角度偏移。
方向误差通常由于转动惯量不平衡、传感器精度不足等原因引起。
3.速度误差:
速度误差是指机器人实际运动速度与预期运动速度之间的偏移。
速度误差通常由于电机转速控制不准确、机械结构刚度不足等原因引起。
三、机器人轨迹跟踪误差的影响因素
1.机器人本身的特性:
机器人本身的特性包括机械结构、控制系统、传感器等。
这些特性对机器人轨迹跟踪误差有着直接的影响。
2.环境因素:
环境因素包括温度、湿度、磁场等。
这些因素会影响机器人传感器的精度和稳定性,从而导致轨迹跟踪误差。
3.控制算法:
控制算法是指用于控制机器人运动的数学模型和算法。
不同的控制算法对轨迹跟踪误差有不同的影响。
四、机器人轨迹跟踪误差的解决方法
1.提高传感器精度:
提高传感器精度可以减少位置误差和方向误差。
可以采用更高精度的传感器或者通过多传感器联合测量来提高精度。
2.优化控制算法:
优化控制算法可以减少位置误差、方向误差和速度误差。
例如,采用自适应控制算法、模糊控制算法等可以有效地提高轨迹跟踪精度。
3.改进机械结构:
改进机械结构可以减少位置误差和速度误差。
例如,增加机械结构的
刚度、减少摩擦力等可以有效地提高轨迹跟踪精度。
4.降低环境干扰:
降低环境干扰可以减少传感器的误差,从而提高轨迹跟踪精度。
例如,采用抗干扰传感器、隔离磁场等措施可以有效地降低环境干扰。
五、总结
机器人轨迹跟踪误差是机器人运动中不可避免的问题,但通过优化控
制算法、提高传感器精度、改进机械结构和降低环境干扰等方法,可
以有效地减少轨迹跟踪误差。
这些方法将有助于提高机器人的精度和
稳定性,从而更好地满足实际应用需求。