【精品毕设】水平多关节机器人设计
多关节机器人PPT

Thanks!
这种机构的机器人最著名的有 DeVilbiss Trallfa、Nordson机器 人,它们都采用液压驱动系统。 Unimation PUMA和ASEA都是由 电动机驱动的机器人。
2.5 并联型机器人
这是一种新型结构的机器人,它通过各件 的复合运动,给出末端的运动轨迹,以完 成不同类型的作业。该结构机器人的特点 是刚性好,可用来完成数控机床的一些功 能,因此也称为并联机床。 目前已有样机,可以完成复杂曲面的加工, 特别是精细的加工,是数控机床的一种新 的结构形式,也是机器人功能的一种拓展。 但其控制计算十分复杂,工作范围也非常 小,而其精度目前比数控机床低。
机器人的速度时间特性曲线
6、位臵精度 位臵精度在不同厂家的样本中有不同的描述。但是这些描述所 表示的内容,都是重复定位精度。 机器人的发展使重复定位的精度逐渐的提高,现在已达到 ±0.03mm的高精度,这种产品用在目前的机器人所担负的工作 来看,已充足有余。机器人经过示教后,各个轴把经过的路线在 各自的存储器中记录下来。当再现时,达到了记录的位臵。这种 方法就是机器人的重复再现的基本原理,但是驱动系统能否做到 如此的灵活与准确,这就是机器人运动的重复定位所追求的。
3、机器人的作业空间
作业空间也有的称为工作范围,它是指机器人手臂或者末端操作器的工 具安装点(注意,这个点就是安装法兰盘的中心点)所能到达的所有空 间区域。但是不包括末端操作器本身所能到达的区域。 作业空间的大小与机器人各个臂的动作极限范围有关,而动作极限范围 与结构有关。多关节机器人的作业空间是一个中空的球体。
这种结构较其他各种结构更容易伸入到 上下倾斜的孔德内部,当又这种需求时 应优先考虑球坐标型机器人。 c
2.3 直角坐标型机器人
关节型搬运机器人设计

关节型搬运机器人设计摘要随着现代工业机器人技术的发展,工业机器人的使用迅速增长。
本文通过对国外工业机器人的分析,并结合搬运所需要的条件,设计出了工厂自动化生产和生产线使用的搬运机器人。
本文着重对搬运机器人的总体设计方案、机构及控制系统从理论上进行了详细的分析和设计。
在搬运机器人总体设计中,采用了应用最为广泛的平面关节型;在机构设计中,主要设计了搬运机器人末端执行器、手腕、手臂和腰的机械结构;在末端执行器设计上采用了一种具有接近觉、接触觉及滑动觉的初级智能机械手;在控制系统的设计中,采用可编程控制器(PLC)进行控制,并对控制系统的硬件原理做了分析,对PLC 的程序也进行了编译;在驱动系统设计中,采用了气动和电机两种驱动方式,主要动作采用电机驱动。
关键词:搬运机器人,三感觉机械手,可编程序控制器Design of the joint transporting robotAbstractUnder the development of the modern industrial robot’s technology , the use of industrial robot increases rapidly. Through analyzing the domestic and foreign industrial robots, combing the conditions of the transportation, the transporting robot for the factory automation produce and the production line is designed in this article.The emphasis on this article is to analyze and design the transporting robot in theory. The analytical objects include the total scheme, the mechanism design, and the control system design. In the total scheme design, the most wildly applied plane joint type is chosen. In the mechanism, the transporting robot’s end-effector, the wrist, the arm and the waist are mainly designed. A kind of the approaching sense, the contact sense and the skidding sense primary intelligence manipulator is adopted in the end-effector; In the control system, the programmable controller (PLC) is used, the principle of hardware is analyzed and the programs in PLC are compiled. In the actuating system, two driving types are used which include the pneumatic operation and the motor. The main movement is driven by the motor.Key words: Transporting robot, three feelings manipulators, programmable controller(PLC)1.引言本课题研制的搬运机器人,是一种综合了人和机器特长的拟人机械电子装置,既有人对环境状态的快速反应和分析判断能力,又有长时间持续工作、精确度高、抗恶劣环境的能力,是先进制造技术领域不可缺少的自动化设备。
多关节示教工业机器人的设计

多关节示教工业机器人的设计作者:王江华赵燕来源:《电脑知识与技术》2017年第16期摘要:为了将人们的双手从重复劳累且危险的工作中解放出来,故设计并制作一款多关节示教工业机器人,使之替代人类来完成重复性高且复杂并具有一定危险性的工作。
设计主要是对多关节示教工业机器人的运动路径进行控制,让其可以根据程序设定优化的路径或者示教路径进行自主运动,使用机械夹手完成指定的任务,同时还能借助于电脑上位机来实时操作以便完成有效的动作。
课题研究对于示教机器人领域的研究和发展具有一定的意义。
关键词:多关节;示教;示教路径;自主运动目前,在高端制造业中,工业机器人俨然已经成为工业生产中不可忽视的重要组成部分,它的智能性、高效性、精确性成为能够替代人类的巨大优势。
设计多关节示教工业机器人,主要是对它的运动路径进行控制,让其可以根据程序设定优化的路径或者示教路径进行自主运动,使用机械夹手完成指定的任务,同时还能借助于电脑上位机来实时操作,以便完成有效的动作。
在工业机器人中,大多数的工业机器人采用示教编程方式,先用人工操作的方式来起到示范的目的和作用,让工业机器人记住相关有效动作,进而使之能够在人工不干预的情况下进行预期的动作。
这种方法可以大大节省开发周期和成本,便于在不同的操作环境下进行,适应性强,因此,本研究对于示教机器人领域的研究和发展具有一定的意义。
1总体方案设计多关节示教工业机器人硬件采用STM32F103作为主控核心,利用松下MINAS系列的交流伺服电机来控制各关节的运动;软件利用RTX小型嵌入式系统。
RTX嵌入式系统是可裁剪的,用户可以根据自己的情况对系统进行配置,对于这种多任务的控制系统,使用嵌入式操作系统可以使软件设计更加高效、方便。
示教盒采用手轮脉冲发生器,手轮脉冲发生器一直使用在工控场合,它可以产生精确数量的脉冲,满足精准定位的要求,且脉冲频率可由用户来控制。
通过通道选择旋钮、倍率选择旋钮可以快速切换控制关节和脉冲倍频,从而控制各个电机的转速。
详解六轴关节机器人运动原理和机械结构!附送3D实体模型!
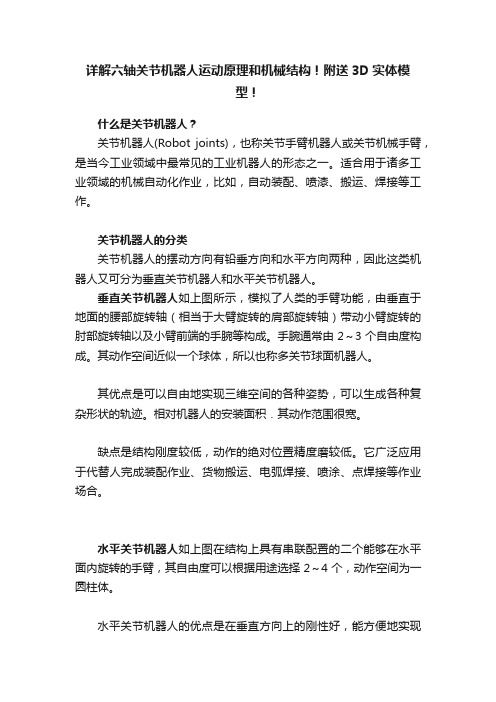
详解六轴关节机器人运动原理和机械结构!附送3D实体模型!什么是关节机器人?关节机器人(Robot joints),也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一。
适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。
关节机器人的分类关节机器人的摆动方向有铅垂方向和水平方向两种,因此这类机器人又可分为垂直关节机器人和水平关节机器人。
垂直关节机器人如上图所示,模拟了人类的手臂功能,由垂直于地面的腰部旋转轴(相当于大臂旋转的肩部旋转轴)带动小臂旋转的肘部旋转轴以及小臂前端的手腕等构成。
手腕通常由2~3个自由度构成。
其动作空间近似一个球体,所以也称多关节球面机器人。
其优点是可以自由地实现三维空间的各种姿势,可以生成各种复杂形状的轨迹。
相对机器人的安装面积.其动作范围很宽。
缺点是结构刚度较低,动作的绝对位置精度磨较低。
它广泛应用于代替人完成装配作业、货物搬运、电弧焊接、喷涂、点焊接等作业场合。
水平关节机器人如上图在结构上具有串联配置的二个能够在水平面内旋转的手臂,其自由度可以根据用途选择2~4个,动作空间为一圆柱体。
水平关节机器人的优点是在垂直方向上的刚性好,能方便地实现二维平面上的动作,在装配作业中得到普遍应用。
此外,还可以按照关节机器人的工作性质分类,可分为很多种,比如:搬运机器人,点焊机器人,弧焊机器人,喷漆机器人,激光切割机器人等。
关节机器人的优缺点关节机器人的优点1)结构紧凑,工作范围大而安装占地面积小。
2)具有很高的可达性。
关节坐标式机器人可以使其手部进入像汽车车身这样一个封闭的空间内进行作业,而直角坐标式机器人不能进行此类作业。
3)因为没有移动关节,所以不需要导轨。
转动关节容易密封,由于轴承件是大量生产的标准件,则摩擦小,惯性小,可靠性好。
4)所需关节驱动力矩小,能量消耗较小。
5)代替很多不适合人力完成、有害身体健康的复杂工作。
关节机器人的缺点1)肘关节和肩关节轴线是平行的,当大、小臂舒展成一直线时,虽能抵达很远的工作点,但机器人的结构刚度比较低。
多关节型搬运机械手结构设计分析
多关节型搬运机械手结构设计分析文章着手于多关节型搬运机械手的功用特点,通过对相关资料进行分析,有效得出多关节型搬运机械手的机构设计方案与控制系统的设计方案,以期为今后多关节型搬运机械手的创新与实际应用提供正确的参考。
标签:多关节型;搬运机械手;结构设计引言多关节型搬运机械手作为我国自动化技术发展过程中的产物,是新技术、新手段实际应用于加工生产中的重要体现。
多关节型搬运机械手常用于工业上圆柱形金属部件的几何特征检测系统中,其在实际应用中可以将大吨位的水平放置的金属部件安全平稳的放置到测量工位上,并且在测量结束以后还能实现将金属部件装车的工作效用,极大的降低了加工生产过程中的能源消耗,为企业节约了成本,在实际应用的过程中发挥出了重要作用。
1 多关节型搬运机械手的机械构造设计1.1 多关节型搬运机械手的整体设计通过对相关文献进行查阅,文章根据多关节型搬运机械手的工作目的以及工作环境,对该机械的整体机构进行有效设计[1]。
在本次设计过程中,多关节型搬运机械手由两个可移动关节与四个旋转关节所构成,在实际应用过程中可实现六个自由度变换,机械运动形式是多关节式。
多关节型搬运机械手的设计过程中,机械原动件作为机械定位工作与运动工作的重要保障性因素,在设计过程中采用液压缸与电机,有效提升多关节型搬运机械手的定位精度与动力强度。
对多关节型搬运机械手的前三个自由度,在设计过程中采用电机驱动的方式,以此保证多关节型搬运机械手在实际应用过程中能够实现更加准确的定位操作。
在后三个自由度的设计过程中,由于考虑到多关节型搬运机械手的驱动力因素,所以,后三个自由度采用液压驱动装置,以此实现多关节型搬运机械手在满足定位精确的前提下,还能保证较高的驱动强度,使多关节型搬运机械手可以满足各种特殊操作的实际需要。
多关节型搬运机械手在设计过程中,其基础部件构成分别为基座、手臂、电机、立柱、末端执行器、后壳体、小臂俯仰电机、腰部回转电机、盖板、腕部回转液压缸[2]。
全气动多自由度关节型机器人的结构设计
南京理工大学毕业设计说明书(论文)作者: 学号:学院(系):机械工程学院专业: 机械工程及自动化题目: 全气动多自由度关节型机器人的结构优化研究指导者:(姓名)(专业技术职务)评阅者:(姓名)(专业技术职务)2007 年 6 月毕业设计说明书(论文)中文摘要毕业设计说明书(论文)外文摘要目次1 绪论 (1)1.1 课题研究的背景和意义 (1)1.2 国内外气动机器人的研究现状 (1)1.3 本课题研究的内容 (4)2 全气动关节型机器人的结构优化总体技术方案 (6)2.1 现有系统的结构分析 (6)2.1.1 腰部回转运动原有结构的分析 (7)2.1.2 直线运动转换为旋转运动的几种形式 (8)2.1.3 齿侧间隙 (10)2.2 系统结构优化总体技术方案 (10)2.2.1 同步带传动 (10)2.2.2 同步带的分类 (11)2.2.3 同步带传动的优点 (11)2.2.4 圆弧齿同步带传动 (12)3 全气动关节型机器人的优化结构研究 (14)3.1 圆弧齿同步带传动结构设计 (14)3.2 机械结构的设计和计算 (16)3.2.1 同步带轮的设计计算 (16)3.2.2 机架轴承的选用 (18)3.3 机械结构的强度校核 (19)3.3.1 带轮轴的强度校核 (19)3.3.2 平键的强度校核 (22)3.3.3 受力较大的螺纹联接强度校核 (22)4 全气动关节型机器人的腰关节控制方案研究 (25)4.1 ML2B伺服气缸基本特性分析 (25)4.2 CEU2专用控制器 (26)4.3 气动机器人腰部关节气动控制回路 (27)5 全气动关节型机器人优化结构试验研究 (29)5.1 试验方案 (29)5.2 实验结果和分析 (30)5.2.1 旋转电位器的标定 (30)5.2.2 试验过程和结果分析 (30)结论 (35)致谢 (36)参考文献 (37)附录 (39)1 绪论1.1 课题研究的背景和意义机器人技术是集合了诸多学科为一体的一门综合技术,是关键的自动化技术[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)感觉功能
感觉功能方面将实现多传感器信息的融合,以检测多变的外部环境,做出判断和决策,其实质类似于人的五官和身体的综合感觉功能,包括视觉、触觉、力觉、滑觉、接近觉、压觉、听觉、味觉、臭觉、温觉等。研究包括各类传感信息的采集及融合处理、传感器与驱动器一体化技术、感觉功能继承模块等。
NT/95环境。该语言易学医用,可用于各种开发环境,与大多数WINDOWS软件产品兼容。
(6)网络通用方式
大部分机器人采用了Ether网络通讯方式,占总量的41.3,其它采用RS-232、RA-422、RS-485等通讯接口。
(7)高速、高精度、多功能化
目前,最快的装配机器人最大合成速度为16.5m/s。位置重复精度为正负0.01mm。但有一种速度竞达到80m/s;而另一种并连机构的NC机器人,其位置重复精度大1微秒。
2、工业机器人技术发展现状
在普及第一代工业机器人的基础上,第二代工业机器人已经推广,成为主流安装机型,第三代智能机器人已占有一定比重(占日本1998年安装台数的10%,销售额的36%)
(1)机械结构
①已关节型为主流,80年代发明的使用于装配作业的平面关节机器人约占总量的1/3。90年代初开发的适应于窄小空间、快节奏、360度全工作空间范围的垂直关节机器人大量用于焊接和上、下料。
(4)应用智能化的传感器
装有视觉传感器的机器人数量呈上升趋势,不少机器人装有两种传感器,有些机器人留了多种传感器接口。
(5)通用机器人编程语言
在ABB公司的20多个小型号产品中,采用了通用模化块语言RAPID。最近美国“机器人工作空间技术公司”开发了Robot Script
V.10通用语言,运行于该公司的通用机器人控制器URC的Win
在制造业中诞生的工业机器人是继动力机、计算机之后而出现的全面延伸人的体力和智力的新一代生产工具,作为现代制造业的主要自动化装备在制造业中广泛应用,并将在未来的制造企业中扮演越来越重要的角色。
机器人及其自动化成套装备已成为目前国内外极受重视的高新技术应用领域。机器人及其自动化成套装备是指以机器人为核心,以信息技术和网络技术为媒介,将所有设备连接到一起而形成的大型自动化生产线。它是先进制造装备的典型代表,是发展先进制造技术实现生产线的数字化、网络化和智能化的重要手段。
目前,机器人已经越来越多、越来越广泛地应用于生产生活的各个方面。金字塔探密,机器人功不可没。美国攻打伊拉克,机器人也发挥了重要作用。中国神州五号的成功发射,充分显示了我国在机器人某个领域的实力。
我国现代工业机器人技术发展现状的研究
1、工业机器人技术概念
工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。
据介绍,机器人及其成套设备的应用将使现代制造业产生变革,对改变传统生产模式,全面提升企业的综合竞争力具有重大作用。机器人及其自动化成套装备的拥有量和水平是衡量一个国家制造综合实力的重要标志之一。
在机器人中,人(操作者)是不可缺少的重要组成部分,在用这种装置完成一项操作任务的整个过程中,自始至终都必须有人的参加。同时,人通过观察系统对从动部件的工作情况及其周围环境保持直接或间接的视觉监视,从而能充分的依靠人的感觉和智力及时做出判断和决策,以适应工作对象或其周围环境的变化,随机应变地完成那些较为复杂的、或者事先难以预料的操作任务。
③采用基于PC的开放结构的控制系统已成为一股潮流,其成本低、具有标准现场网络功能。
(3)驱动技术
①80年代发展起来的AC侍服驱动已成为主流驱动技术用于工业机器人中。DD驱动技术则广泛地用于装配机器人中。
②新一代的侍服电机与基于微处理器的智能侍服控制器相结合已由FANUC等公司开发并用于工业机器人中,在远程控制中已采用了分布式智能驱动新技术。
本科生毕业设计(论文)
开题报告
学生姓名:沈维堂
学号:14021217
班级:140212
专业:机械工程及自动化
指导教师:张宏颖
开题报告
课题名称:水平多关节型工业机器人设计
——机身与大臂结构及控制系统设计
一、课题介绍:
课题背景:
据有关专家介绍,机器人充分体现了人和机器的各自优长,它比传统机器具有更大的灵活性和更广泛的应用范围。机器人的出现和应用是人类生产和社会进步的需要,是科学技术发展和生产工具进化的必然。
(8)集成化与系统化
当今工业机器人技术的另一特点是应用从单机、单元向系统发展。百台以上的机器人群与微机及周边智能设备和操作人员形成一个大群体(多智能体)。跨国大集团的垄断和全球化的生产将世界众多厂家的产品连接在一起,实现了标准化、开放化、网络化的“虚拟制造”,为工业机器人系统化的发展推波助澜。
3、技术发展趋势
②应3K和汽车、建筑、桥梁等行业需求,超大型机器人应运而生。如焊接树10米长、10吨以上大构件的弧焊机器人群,采取蚂蚁啃骨头的协作机构。
③CAD、CAE等技术已普遍用于设计,仿真和制造中。
(2)控制技术
①大多数采用32位CPU,控制轴数多达27轴,NC技术、离线编程技术大量采用。
②协调控制技术日趋成熟,实现了多手与变位机、多机器人的协调控制,正逐步实现多智能体的协调控制。