仿真技术实验程序及思考题解答完整版

实验一 连续系统的数字仿真
一、实验目的
1. 熟悉Matlab 中m 文件的编写;
2. 掌握龙格-库塔法的基本原理。
二、实验设备
计算机、MATLAB 软件
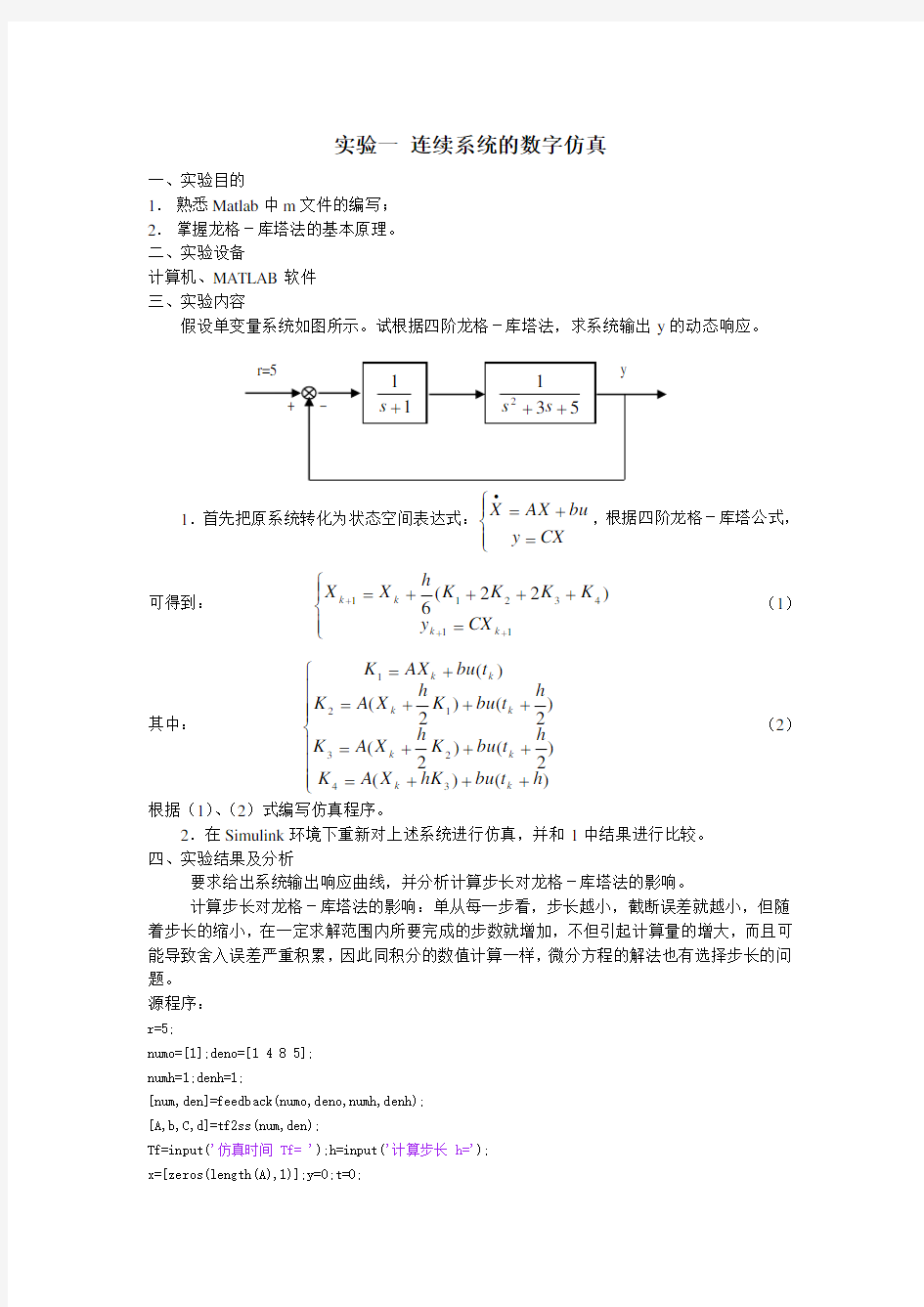
三、实验内容
假设单变量系统如图所示。试根据四阶龙格-库塔法,求系统输出y 的动态响应。
1.首先把原系统转化为状态空间表达式:?????=+=?CX
y bu AX X ,根据四阶龙格-库塔公式,
可得到: ??
???=++++=+++1143211)22(6k k k k CX y K K K K h X X (1) 其中: ?????????+++=+++=+++=+=)
()()2()2()2()2()(3423121h t bu hK X A K h t bu K h X A K h t bu K h X A K t bu AX K k k k k k k k k (2) 根据(1)、(2)式编写仿真程序。
2.在Simulink 环境下重新对上述系统进行仿真,并和1中结果进行比较。
四、实验结果及分析
要求给出系统输出响应曲线,并分析计算步长对龙格-库塔法的影响。
计算步长对龙格-库塔法的影响:单从每一步看,步长越小,截断误差就越小,但随着步长的缩小,在一定求解范围内所要完成的步数就增加,不但引起计算量的增大,而且可能导致舍入误差严重积累,因此同积分的数值计算一样,微分方程的解法也有选择步长的问题。
源程序:
r=5;
numo=[1];deno=[1 4 8 5];
numh=1;denh=1;
[num,den]=feedback(numo,deno,numh,denh);
[A,b,C,d]=tf2ss(num,den);
Tf=input('仿真时间 Tf= ');h=input('计算步长 h=');
x=[zeros(length(A),1)];y=0;t=0;
for i=1:Tf/h;
K2=A*(x+h*K1/2)+b*r;
K3=A*(x+h*K2/2)+b*r;
K4=A*(x+h*K3)+b*r;
x=x+h*(K1+2*K2+2*K3+K4)/6;
y=[y;C*x];t=[t;t(i)+h];
end
plot(t,y)
Tf=5 h=0.02
五、思考题
1.试说明四阶龙格-库塔法与计算步长关系,它与欧拉法有何区别。
计算步长对龙格-库塔法的影响:单从每一步看,步长越小,截断误差就越小,但随着步长的缩小,在一定求解范围内所要完成的步数就增加,不但引起计算量的增大,而且可能导致舍入误差严重积累,因此同积分的数值计算一样,微分方程的解法也有选择步长的问题。
区别:四阶龙格库塔法与欧拉法都是基于在初值附近展开成泰勒级数的原理,所不同的是取泰勒级数的项数,欧拉公式仅取到h项,四阶龙格库塔法取到h4项。
实验二面向结构图的仿真
一、实验目的
1.掌握连接矩阵及系统状态方程的确定方法;
2.掌握面向结构图的仿真方法。
二、实验设备
计算机、MATLAB软件
三、实验内容
仿真基本步骤:
1.给定输入信号,确定典型环节及环节参数;
2.确定连接矩阵;
3.输入仿真时间和计算步长;
4.求H,H-1和Q阵,确定A、B阵;
5.根据龙格-库塔法求状态方程的解;
6.根据1~5编写仿真程序。
四、实验结果及分析
源程序:
r=10;
P=[0 1 1 0;2 1 2 0;10 1 10 0];
W=[0 0 -1;1 0 0; 0 1 0];
W0=[1;0;0];
Wc=[0 0 1];
Tf=input('仿真时间 Tf =');h=input( '计算步长 h=');
A1=diag(P(:,1));B1=diag(P(:,2));C1=diag(P(:,3));D1=diag(P(:,4));
H=B1-D1*W;Q=C1*W-A1;
A=inv(H)*Q;B=inv(H)*C1*W0;
x=[zeros(length(A),1)];y=[zeros(length(Wc(:,1)),1)];
t=0;
for i=1:Tf/h;
K1=A*x+B*r;
K2=A*(x+h*K1/2)+B*r;
K3=A*(x+h*K2/2)+B*r;
K4=A*(x+h*K3)+B*r;
x=x+h*(K1+2*K2+2*K3+K4)/6;
y=[y;Wc*x];t=[t;t(i)+h];
end
plot(t,y) 仿真时间Tf=10 计算步长h=0.05
图一 仿真曲线
五、思考题
1. 典型环节的确定必须满足什么条件?
答: G(S)=bs
a ds ++=c U(S)X(S)式中u 为典型环节的输入,x 为典型环节的输出。 1.为了保证H 的逆1-H 存在,应严格按照i
b ≠0的原则确定每个典型环节,既避免以纯比例、
纯微分环节作为典型环节。
2.在输入向量不全为阶跃函数的情况下,只要在确定典型环节时,注意使含有微分项系数即
d≠0)的环节不直接与参考输入连接。
(
i
实验三连续系统的快速仿真
一、实验目的
1.熟悉增广矩阵的构建方法;
2.掌握连续系统的快速仿真基本原理。
二、实验设备
计算机、MATLAB软件
三、实验内容
假设某系统结构图如下,要求采用快速仿真方法求系统输出响应。Array
仿真基本步骤:
1.给定输入信号,确定典型环节及环节参数;
2.确定连接矩阵;
3.输入仿真时间和计算步长;
4.求H,H-1和Q阵,确定A、B阵;
5.构建增广矩阵;
6.采用增广矩阵法求齐次方程的解和系统输出响应。
根据1~6编写仿真程序。
四、实验结果和分析
源程序:
r=10;
[num,den]=series(1,[1,0],2,[1,2]);
[num,den]=series(num,den,10,[1,10]);
[num,den]=cloop(num,den);
[A1,B1,C1,D1]=tf2ss(num,den);
A=[A1,B1;0,0,0,0];
C=[C1,0];
Tf=10;
h=0.05;
k1=eye(size(A));
k2=A*h;
k3=k2*k2/2;
k4=k3*k2/3;
k=k1+k2+k3+k4;
x=[zeros(size(A1,1),1);10];
y=0;
t=0;
for i=1:Tf/h
x=k*x;
y=[y,C*x];
t=[t,i*h];
end
plot(t,y)
五、思考题
1.增广矩阵法和四阶龙格-库塔法有何区别?
答: ...t A !
31t A 21At I e 3322A ++++=!t 如果取t A e 的泰勒级数前五项,则增广矩阵的计算与四阶龙格库塔法相同。
四阶龙格库塔法具有很高的精度,但运行速度很慢,而增广矩阵法既满足了精度又满足了速度。
实验四 离散相似法仿真
一、实验目的
1. 掌握离散化的基本原理;
2. 掌握非线性系统的离散化仿真方法。
二、实验设备
计算机、MATLAB 软件
三、实验内容
已知非线性系统结构图如下,求系统输出响应。
1. 给定参考输入,输入仿真时间,采样周期(T=0.1s );
2. 将被控对象离散化;
3. 给定参数初始值;
4. 计算误差和非线性环节输出;
5.计算系统输出;
6.参数值更新;
7.若仿真时间到,则结束,否则转1。
编写仿真程序,求解系统输出响应。
四、实验结果及分析
源程序:
%backlash.m
function [x,u1]=backlash(u1,u,x1,s)
if (u>u1)
if ((u-s)>=x1) x=u-s;else x=x1;end else if (u if ((u+s)<=x1) x=u+s;else x=x1;end else x=x1; end end u1=u; 主程序: r=10; [num,den]=series([1 0.5],[1 0.1],[1],[1 0]); [num,den]=series(num,den,2,[1,2]); [num,den]=series(num,den,10,[1 10]); [A,B,C,D]=tf2ss(num,den); Tf=10; T=0.025; [G,H,C,D]=c2dm(A,B,C,D,T,'zoh'); x=zeros(size(G,1),1); y=0; t=0; s=1; e1=0;u1=0; for i=1:Tf/T e=r-y(end); u=backlash(e1,e,u1,s); x=G*x+H*u; y=[y,C*x+D*u]; t=[t,i*T]; u1=u; e1=e; end; plot(t,y) 五、思考题 1.试比较零阶保持器与双线性变换法区别。 答:零阶保持器与双线性变换都能够实现将连续系统的离散化,只是所使用的方法不同,零阶保持器是在系统中加入了s e Ts --1实现离散化,而双线性变换是直接将1 12+-=z z h s 代入传递函数实现离散化。 实验五 采样控制系统的数字仿真 一、实验目的 3. 掌握采样控制系统基本原理; 4. 掌握常用的离散化方法; 5. 掌握采样控制系统的仿真方法。 二、实验设备 计算机、MATLAB 软件 三、实验内容 已知采样系统结构如下图所示,求系统的输出响应。 将系统中连续部分采用零阶保持器离散化,系统采用离散化方法进行仿真(同步采样),其具体步骤如下: 1、 给定参考输入,输入仿真时间,采样周期(T=0.1s ),PID 控制器参数; 2、将被控对象按零阶保持器方法离散化; 3、给定参数初始值; 4、计算误差和控制器输出; 5、计算系统输出; 6、参数值更新 7、若仿真时间到,则结束,否则转1。 编写仿真程序,并调整控制器参数,使得系统输出响应较为合理。 四、实验结果及分析 源程序: r=1; Tf=20; Tm=1; T=0.01; kp=0.4; ki=0; kd=0; [A,B,C,D]=tf2ss(1,[1 1 0]); [G,H,C,D]=c2dm(A,B,C,D,T,'zoh'); u1=0; e2=0; e1=0; x=zeros(2,1); y=0; t=0; for i=1:Tf/T e=r-y(end); u2=u1+kp*(e-e1)+ki*e+kd*(e-2e1+e2); x=G*x+H*u2; y=[y,C*x+D*u2]; t=[t,i*T]; e2=e1;e1=e;u1=u2; end plot(t,y); 五、思考题 2. 同步采样与异步采样在程序实现上有何区别? 答:同步采样:T=h ,异步采样T=N*h 同步采样时,在程序中只要一个for 循环即可实现,而异步采样需要两个for 循环实现。 实验六 串联超前校正 一、实验目的 1. 掌握超前校正装置的基本特性; 2. 熟悉串联超前校正方法。 二、实验设备 计算机、MATLAB 软件 三、实验内容 设有一单位负反馈系统,其开环传递函数为:) 2()(0+=s s k s G ,要求系统的稳态速度误差系数k v =20(1/s),相位裕量r>50,幅值裕量k g >10db ,试确定串联校正装置。 设计基本步骤: 1. 根据性能指标确定开环增益k ; 2. 利用确定的开环增益k 画出未校正系统的Bode 图,并求其相位裕量r0和幅值裕量 k g ; 3. 确定所需增加的超前相位角ε+-=Φ0r r c ,ε一般取5~15; 4. 令超前校正装置最大超前角c m Φ=Φ,则c c Φ+Φ-=sin 1sin 1α; 5. 将校正装置的最大超前相位角处的频率m w 作为校正后系统的剪切频率c w ,则: α1 |)(|0=c jw G ; 6. 根据c m w w =,可求得:αc w T 1 =; 7. 画出校正后系统Bode 图,检验指标是否满足,如不满足,增大ε重新设计。 四、实验结果及分析 源程序见课本P220 num0=40;den0=conv([1,0],[1,2]); [Gm1,Pm1,Wcg1,Wcp1]=margin(num0,den0); r=50;r0=Pm1; w=logspace(-1,3); [mag1,phasel]=bode(num0,den0,w); for epsilon=5:15 phic=(r-r0+epsilon)*pi/180; alpha=(1+sin(phic))/(1-sin(phic)); [i1,ii]=min(abs(mag1-1/sqrt(alpha))); wc=w(ii); T=1/(wc*sqrt(alpha)); numc=[alpha*T,1];denc=[T,1]; [num,den]=series(num0,den0,numc,denc); [Gm,Pm,Wcg,Wcp]=margin(num,den); if(Pm>=r); break; end end printsys(numc,denc) printsys(num,den) [mag2,phase2]=bode(numc,denc,w); [mag,phase]=bode(num,den,w); subplot(2,1,1);semilogx(w,20*log10(mag),w,20*log10(mag1),'--',w,20*lo g10(mag2),'-.'); grid;ylabel('?ù?죨dB£?');title('--Go,-.Gc,-GoGc'); subplot(2,1,2); semilogx(w,phase,w,phasel,'--',w,phase2,'-.',w,(w-180-w),':'); grid;ylabel('相位(度)');xlabel('频率(radc )') title(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB ,','相位裕量=',num2str(Pm),'度']); disp(['校正前:幅值裕量=',num2str(20*log10(Gm1)),'dB,','相位裕量 =',num2str(Pm1),'度']); disp(['校正后:幅值裕量=',num2str(20*log10(Gm)),'dB,','相位裕量 =',num2str(Pm),'度']); 五、思考题 1.简述串联超前校正的基本思想。 答:串联校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前脚,以补偿原来系统中元件造成的过大相位滞后。因此校正时应使校正装置的最大超前相位出现在校正后系统的开环剪切频率。 实验七 控制系统的计算机辅助分析 一、实验目的 1.掌握控制系统的稳定性分析; 2.掌握控制系统的时域分析; 3.学会利用MATLAB 软件求解控制系统性能指标。 二、实验设备 计算机、MATLAB 软件 三、实验内容 1.已知闭环系统的开环传递函数为 1 22532423)(2345234+++++++++=s s s s s s s s s s G 判断系统的稳定性,并给出不稳定极点。 num=[3 2 1 4 2];den=[3 5 1 2 2 1]; [z,p]=tf2zp(num,den); ii=find(real(p)>0);n1=length(ii); if (n1>0) disp('The Unstable Poles are:'); disp(p(ii)); else disp('System is Stable'); end The Unstable Poles are: 0.4103 + 0.6801i 0.4103 - 0.6801i 2.对于典型二阶系统 2222)(n n n s s s G ωξωω++= 试绘制出自然振荡频率ωn =6,阻尼比ξ=0.2时系统的单位阶跃响应,并求出稳态误差、上升时间,最大超调量及调节时间。 wn=6;zeta=0.2; num=wn^2;den=[1,2*zeta*wn,wn^2]; t=0:0.01:10; [y,x,t]=step(num,den,t); plot(t,y) %求稳态误差 num0=wn^2;den0=[1,2*zeta*wn,0]; sys=tf(num0,den0); sys1=1+sys; sys2=tf(sys1.den,sys1.num); num1=[1,0];den1=[1];sys3=tf(num1,den1); num2=1;den2=[1 0];r=tf(num2,den2); dcg=dcgain(sys2*sys3*r); disp(['稳态误差 dcg=' num2str(dcg)]); %求超调量 [M,lab]=max(y); M=((M-1)/1)*100; disp(['最大超调量 M=' num2str(M) '%']) %求上升时间 t1=t(lab); [Val,lab1]=min(abs(y(1:lab)-1)); Tr=t(lab1); disp(['上升时间 Tr=' num2str(Tr)]); %求调节时间 s=1; L=length(t); while s lab2=find(abs(y(L:end)-1)>0.05); if length(lab2)>0; s=0; else L=L-1; end end L=L+1; Ts=t(L); disp(['调节时间 Ts=' num2str(Ts)]); 四、实验结果及分析 实验八积分分离PID控制算法及仿真 一、实验目的 1.掌握积分分离PID控制算法原理; 2.掌握积分分离PID控制器设计。 二、实验设备 计算机、MATLAB软件 三、实验内容 已知某被控对象传递函数为1 60)(80+=-s e s G s ,采样时间为20s ,延迟时间为4个采样时间,试设计积分分离PID 控制器,并求出系统输出响应。 积分分离算法: ∑=--+ +=k j d i p T k e k e k T j e k k e k k u 0))1()(()()()(β 式中,β为积分项开关系数, ???>≤=εεβ)(0)(1 k e k e 设计基本步骤: 1、给定参考输入,输入仿真时间,采样周期(T=0.1s ),积分分离PID 控制器参数; 2、被控对象离散化:y(k)=-den(2)y(k-1)+num(2)u(k-5); 3、给定输入信号r(k)=40; 4、设定阈值ε>0,计算当前误差e(k),若ε>)(k e 时,采用PD 控制,避免超调过大,同时使系统响应较快;当ε≤)(k e 时,采用PID 控制,保证精度。 5、计算系统响应y(k)。 四、实验结果及分析 %Integration Separation PID Controller clear all ; close all ; ts=20; %Delay plant sys=tf([1],[60,1],'inputdelay',80);%构造exp(80),inputdelay 不能少 dsys=c2d(sys,ts,'zoh'); [num,den]=tfdata(dsys,'v'); u_1=0;u_2=0;u_3=0;u_4=0;u_5=0; y_1=0;y_2=0;y_3=0; error_1=0; ei=0; for k=1:1:200 time(k)=k*ts; rin(k)=40; kp=0.80; ki=0.005; kd=3.0; %Delay plant yout(k)=-den(2)*y_1+num(2)*u_5; %I separation error(k)=rin(k)-yout(k); M=2; if M==1 %Using integration separation if abs(error(k))>=30&abs(error(k))<=40 beta=0.3; elseif abs(error(k))>=20&abs(error(k))<=30 beta=0.6; elseif abs(error(k))>=10&abs(error(k))<=20 beta=0.9; else beta=1.0; end elseif M==2 beta=1.0; %Not using integration separation end kp=0.80; ki=0.005; kd=3.0; ei=ei+error(k)*ts; %积分作用 u(k)=kp*error(k)+kd*(error(k)-error_1)/ts+beta*ki*ei; if u(k)>=110 % 限制PID输出值 u(k)=110; end if u(k)<=-110 u(k)=-110; end u_5=u_4;u_4=u_3;u_3=u_2;u_2=u_1;u_1=u(k); y_3=y_2;y_2=y_1;y_1=yout(k); error_2=error_1; error_1=error(k); end figure(1); plot(time,rin,'b',time,yout,'r'); xlabel('time(s)');ylabel('rin,yout'); figure(2); plot(time,u,'r'); xlabel('time(s)');ylabel('u'); 五、思考题 1、试比较PID与积分分离PID控制算法。 实验一 实验内容和步骤 练习图像的读取、显示和保存图像数据,步骤如下: (1)使用命令figure(1)开辟一个显示窗口 (2)读入一幅RGB图像,变换为灰度图像和二值图像,并在同一个窗口内显示、二值图像和灰度图像,注上文字标题。 (3)保存转换后的灰度图像和二值图像 (4)在同一个窗口显示转换后的灰度图像的直方图 I=imread('BaboonRGB.bmp'); figure,imshow(I); I_gray=rgb2gray(I); figure,imshow(I_gray); I_2bw=Im2bw(I_gray); figure,imshow(I_2bw); subplot(1,3,1),imshow(I),title('RGB图像'); subplot(1,3,2),imshow(I_gray),title('灰度图像'); subplot(1,3,3),imshow(I_2bw),title('二值图像'); imwrite(I_gray,'Baboongray.png'); imwrite(I_2bw,'Baboon2bw.tif'); figure;imhist(I_gray); RGB 图 像灰度图 像二值图 像 050100150200250 500 1000 1500 2000 2500 3000 (5)将原RGB 图像的R 、G 、B 三个分量图像显示在figure(2)中,观察对比它们的特点,体会不同颜色所对应的R 、G 、B 分量的不同之处。 [A_RGB,MAP]=imread('BaboonRGB.bmp'); subplot(2,2,1),imshow(A_RGB),title('RGB'); subplot(2,2,2),imshow(A_RGB(:,:,1)),title('R'); subplot(2,2,3),imshow(A_RGB(:,:,2)),title('G'); subplot(2,2,4),imshow(A_RGB(:,:,3)),title('B'); (6)将图像放大1.5倍,插值方法使用三种不同方法,在figure(3)中显示放大后的图像,比较不同插值方法的结果有什么不同。将图像放大到其它倍数,重复实验;A=imread('BaboonRGB.bmp'); figure(3),imshow(A),title('原图像'); B=imresize(A,1.5,'nearest'); figure(4),imshow(B),title('最邻近法') C=imresize(A,1.5,'bilinear'); ; figure(5),imshow(C),title('双线性插值'); D=imresize(A,1.5,'bicubic'); figure(6),imshow(D),title('双三次插值 '); RGB R G B 数字图像处理 实验指导书 学院:通信与电子工程学院 专业:电子信息工程 班级: 学号: 姓名: XX理工大学 实验一 MATLAB数字图像处理初步 一、实验目的与要求 1.熟悉及掌握在MATLAB中能够处理哪些格式图像。 2.熟练掌握在MATLAB中如何读取图像。 3.掌握如何利用MATLAB来获取图像的大小、颜色、高度、宽度等等相关信息。 4.掌握如何在MATLAB中按照指定要求存储一幅图像的方法。 5.图像间如何转化。 二、实验原理及知识点 1、数字图像的表示和类别 一幅图像可以被定义为一个二维函数f(x,y),其中x和y是空间(平面)坐标,f 在任何坐标处(x,y)处的振幅称为图像在该点的亮度。灰度是用来表示黑白图像亮度的一个术语,而彩色图像是由单个二维图像组合形成的。例如,在RGB彩色系统中,一幅彩色图像是由三幅独立的分量图像(红、绿、蓝)组成的。因此,许多为黑白图像处理开发的技术适用于彩色图像处理,方法是分别处理三副独立的分量图像即可。 图像关于x和y坐标以及振幅连续。要将这样的一幅图像转化为数字形式,就要求数字化坐标和振幅。将坐标值数字化成为取样;将振幅数字化成为量化。采样和量化的过程如图1所示。因此,当f的x、y分量和振幅都是有限且离散的量时,称该图像为数字图像。 作为MATLAB基本数据类型的数值数组本身十分适于表达图像,矩阵的元素和图像的像素之间有着十分自然的对应关系。 图1 图像的采样和量化 根据图像数据矩阵解释方法的不同,MA TLAB把其处理为4类: 亮度图像(Intensity images) 二值图像(Binary images) 索引图像(Indexed images) RGB图像(RGB images) 数字图像处理实验报告 实验一数字图像基本操作及灰度调整 一、实验目的 1)掌握读、写图像的基本方法。 2)掌握MATLAB语言中图像数据与信息的读取方法。 3)理解图像灰度变换处理在图像增强的作用。 4)掌握绘制灰度直方图的方法,理解灰度直方图的灰度变换及均衡化的方 法。 二、实验内容与要求 1.熟悉MATLAB语言中对图像数据读取,显示等基本函数 特别需要熟悉下列命令:熟悉imread()函数、imwrite()函数、size()函数、Subplot()函数、Figure()函数。 1)将MATLAB目录下work文件夹中的forest.tif图像文件读出.用到imread, imfinfo 等文件,观察一下图像数据,了解一下数字图像在MATLAB中的处理就是处理一个矩阵。将这个图像显示出来(用imshow)。尝试修改map颜色矩阵的值,再将图像显示出来,观察图像颜色的变化。 2)将MATLAB目录下work文件夹中的b747.jpg图像文件读出,用rgb2gray() 将其 转化为灰度图像,记为变量B。 2.图像灰度变换处理在图像增强的作用 读入不同情况的图像,请自己编程和调用Matlab函数用常用灰度变换函数对输入图像进行灰度变换,比较相应的处理效果。 3.绘制图像灰度直方图的方法,对图像进行均衡化处理 请自己编程和调用Matlab函数完成如下实验。 1)显示B的图像及灰度直方图,可以发现其灰度值集中在一段区域,用 imadjust函 数将它的灰度值调整到[0,1]之间,并观察调整后的图像与原图像的差别,调整后的灰 度直方图与原灰度直方图的区别。 2) 对B 进行直方图均衡化处理,试比较与源图的异同。 3) 对B 进行如图所示的分段线形变换处理,试比较与直方图均衡化处理的异同。 图1.1 分段线性变换函数 三、实验原理与算法分析 1. 灰度变换 灰度变换是图像增强的一种重要手段,它常用于改变图象的灰度范围及分布,是图象数字化及图象显示的重要工具。 1) 图像反转 灰度级范围为[0, L-1]的图像反转可由下式获得 r L s --=1 2) 对数运算:有时原图的动态范围太大,超出某些显示设备的允许动态范围, 如直接使用原图,则一部分细节可能丢失。解决的方法是对原图进行灰度压缩,如对数变换: s = c log(1 + r ),c 为常数,r ≥ 0 3) 幂次变换: 0,0,≥≥=γγc cr s 4) 对比拉伸:在实际应用中,为了突出图像中感兴趣的研究对象,常常要求 局部扩展拉伸某一范围的灰度值,或对不同范围的灰度值进行不同的拉伸处理,即分段线性拉伸: 其对应的数学表达式为: 第十一章思考题参考答案 11.1 现浇单向板肋梁楼盖中的主梁按连续梁进行力分析的前提条件是什么?答:(1)次梁是板的支座,主梁是次梁的支座,柱或墙是主梁的支座。 (2)支座为铰支座--但应注意:支承在混凝土柱上的主梁,若梁柱线刚度比<3,将按框架梁计算。板、次梁均按铰接处理。由此引起的误差在计算荷载和力时调整。 (3)不考虑薄膜效应对板力的影响。 (4)在传力时,可分别忽略板、次梁的连续性,按简支构件计算反力。 (5)大于五跨的连续梁、板,当各跨荷载相同,且跨度相差大10%时,可按五跨的等跨连续梁、板计算。 11.2 计算板传给次梁的荷载时,可按次梁的负荷围确定,隐含着什么假定?答:假定板、次梁非连续,并且仅短向传力。 11.3 为什么连续梁力按弹性计算方法与按塑性计算方法时,梁计算跨度的取值是不同的? 答:两者计算跨度的取值是不同的,以中间跨为例,按考虑塑性力重分布计算连续梁力时其计算跨度是取塑性铰截面之间的距离,即取净跨度;而按弹性理论方法计算连续梁力时,则取支座中心线间的距离作为计算跨度,即取。 11.4 试比较钢筋混凝土塑性铰与结构力学中的理想铰和理想塑性铰的区别。答:1)理想铰是不能承受弯矩,而塑性铰则能承受弯矩(基本为不变的弯矩); 2)理想铰集中于一点,而塑性铰有一定长度; 3)理想铰在两个方向都能无限转动,而塑性铰只能在弯矩作用方向作一定限度的转动,是有限转动的单向铰。 11.5 按考虑塑性力重分布设计连续梁是否在任何情况下总是比按弹性方法设计节省钢筋? 答:不是的 11.6 试比较力重分布和应力重分布 答:适筋梁的正截面应力状态经历了三个阶段: 弹性阶段--砼应力为弹性,钢筋应力为弹性; 带裂缝工作阶段--砼压应力为弹塑性,钢筋应力为弹性; 破坏阶段--砼压应力为弹塑性,钢筋应力为塑性。 上述钢筋砼由弹性应力转为弹塑性应力分布,称为应力重分布现象。由结构力学知,静定结构的力仅由平衡条件得,故同截面本身刚度无关,故应力重分布不会引起力重分布,而对超静定结构,则应力重分布现象可能会导: ①截面开裂使刚度发生变化,引起力重分布; ②截面发生转动使结构计算简图发生变化,引起力重分布。 11.7 下列各图形中,哪些属于单向板,哪些属于双向板?图中虚线为简支边,斜线为固定边,没有表示的为自由边。 《数字图像处理》实验指导书 编写: 罗建军 海南大学三亚学院 10月 目录 一、概述 ....................................................................... 错误!未定义书签。 二、建立程序框架 ....................................................... 错误!未定义书签。 三、建立图像类 ........................................................... 错误!未定义书签。 四、定义图像文档实现图像读/写.............................. 错误!未定义书签。 五、实现图像显示 ....................................................... 错误!未定义书签。 六、建立图像处理类................................................... 错误!未定义书签。 七、实现颜色处理功能............................................... 错误!未定义书签。 (一) 亮度处理................................................................. 错误!未定义书签。 (二) 对比度处理............................................................. 错误!未定义书签。 (三) 色阶处理................................................................. 错误!未定义书签。 (四) 伽马变换................................................................. 错误!未定义书签。 (五) 饱和度处理............................................................. 错误!未定义书签。 (六) 色调处理................................................................. 错误!未定义书签。 八、实现几何变换功能............................................... 错误!未定义书签。 (一) 图像缩放................................................................. 错误!未定义书签。 (二) 旋转......................................................................... 错误!未定义书签。 (三) 水平镜像................................................................. 错误!未定义书签。 (四) 垂直镜像................................................................. 错误!未定义书签。 (五) 右转90度................................................................. 错误!未定义书签。 (六) 左转90度................................................................. 错误!未定义书签。 (七) 旋转180度............................................................... 错误!未定义书签。 九、实现平滑锐化功能............................................... 错误!未定义书签。 十、图像处理扩展编程............................................... 错误!未定义书签。 实 验 项 目 微程序控制器实验实验时间2015年10月31日 实验目的(1) 掌握微程序控制器的组成原理。 (2) 掌握微程序的编制、写入,观察微程序的运行过程。 实 验 设 备 PC机一台,TD-CMA实验系统一套 实验原理 微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制的硬件逻辑部件工作的微命令序列,完成数据传送和各种处理操作。它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,称为控制存储器,微程序控制器原理框图如图3-2-1 所示。 控制器是严格按照系统时序来工作的,因而时序控制对于控制器的设计是非常重要的,从前面的实验可以很清楚地了解时序电路的工作原理,本实验所用的时序由时序单元来提供,分为四拍TS1、TS2、TS3、TS4,时序单元的介绍见附录2。 微程序控制器的组成见图3-2-2,其中控制存储器采用3 片2816 的E2PROM,具有掉电保 护功能,微命令寄存器18 位,用两片8D 触发器(273)和一片4D(175)触发器组成。微地址寄存器6 位,用三片正沿触发的双D 触发器(74)组成,它们带有清“0”端和预置端。在不判别测试的情况下,T2 时刻打入微地址寄存器的内容即为下一条微指令地址。当T4 时刻进行测试判别时,转移逻辑满足条件后输出的负脉冲通过强置端将某一触发器置为“1”状态,完成地址修改。 在实验平台中设有一组编程控制开关KK3、KK4、KK5(位于时序与操作台单元),可实现对存储器(包括存储器和控制存储器)的三种操作:编程、校验、运行。考虑到对于存储器(包括存储器和控制存储器)的操作大多集中在一个地址连续的存储空间中,实验平台提供了便利 的手动操作方式。以向00H 单元中写入332211 为例,对于控制存储器进行编辑的具体操作步骤如下:首先将KK1 拨至‘停止’档、KK3 拨至‘编程’档、KK4 拨至‘控存’档、KK5 拨至 ‘置数’档,由CON 单元的SD05——SD00 开关给出需要编辑的控存单元首地址(000000),IN 单元开关给出该控存单元数据的低8 位(00010001),连续两次按动时序与操作台单元的开关ST(第一次按动后MC 单元低8 位显示该单元以前存储的数据,第二次按动后显示当前改动的数据),此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M7——M0 显示当前数据(00010001)。然后将KK5 拨至‘加1’档,IN 单元开关给出该控存单元数据的中8 位(00100010),连续两次按动开关ST,完成对该控存单元中8 位数据的修改,此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M15——M8 显示当前数据(00100010);再由IN 单元开关给出该控存单元数据的高8 位(00110011),连续两次按动开关ST,完成对该控存单元高8 位数据的修改此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M23——M16 显示当前数据(00110011)。此时被编辑的控存单元地址会自动加1(01H),由IN 单元开关依次给出该控存单元数据的低8 位、中8 位和高8 位配合每次开关ST 的两次按动,即可完成对后续单元的编辑。 实验二MATLAB图像运算一、实验目的 1.了解图像的算术运算在数字图像处理中的初步应用。 2.体会图像算术运算处理的过程和处理前后图像的变化。 二、实验步骤 1.图像的加法运算-imadd 对于两个图像f x,y和 (x,y)的均值有: g x,y=1 f x,y+ 1 (x,y) 推广这个公式为: g x,y=αf x,y+β (x,y) 其中,α+β=1。这样就可以得到各种图像合成的效果,也可以用于两张图像的衔接。说明:两个示例图像保存在默认路径下,文件名分别为'rice.png'和'cameraman.tif',要求实现下图所示结果。 代码: I1 = imread('rice.png'); I2 = imread('cameraman.tif'); I3 = imadd(I1, I2,'uint8'); I4 = imadd(I1, I2,'uint16'); subplot(2, 2, 1), imshow(I1), title('?-ê?í???1'); subplot(2, 2, 2), imshow(I2), title('?-ê?í???2'); subplot(2, 2, 3), imshow(I3), title('8??í?????ê?'); subplot(2, 2, 4), imshow(I4), title('16??í?????ê?'); 结果截图: 2.图像的减法运算-imsubtract 说明: 背景图像可通过膨胀算法得到background = imopen(I,strel('disk',15));,要求实现下图所示结果。 示例代码如下: I1 = imread('rice.png'); background = imerode(I1, strel('disk', 15)); rice2 = imsubtract(I1, background); subplot(2, 2, 1), imshow(I1), title('?-ê?í???'); subplot(2, 2, 2), imshow(background), title('±3?°í???'); subplot(2, 2, 3), imshow(rice2), title('′|àíoóμ?í???'); 结果截图: 3.图像的乘法运算-immultiply 实验二不可压缩流体恒定流能量方程(伯诺利方程)实验 成果分析及讨论 1.测压管水头线和总水头线的变化趋势有何不同?为什么? 测压管水头线(P-P)沿程可升可降,线坡J P可正可负。而总水头线(E-E)沿程只降不升,线坡J 恒为正,即J>0。这是因为水在流动过程中,依据一定边界条件,动能和势能可相互转换。测点5至测点7,管收缩,部分势能转换成动能,测压管水头线降低,Jp>0。测点7至测点9,管渐扩,部分动能又转换成势能,测压管水头线升高,J P<0。而据能量方程E1=E2+h w1-2, h w1-2为损失能量,是不可逆的,即恒有h w1-2>0,故E2恒小于E1,(E-E)线不可能回升。(E-E) 线下降的坡度越大,即J越大,表明单位流程上的水头损失越大,如图2.3的渐扩段和阀门等处,表明有较大的局部水头损失存在。 2.流量增加,测压管水头线有何变化?为什么? 有如下二个变化: (1)流量增加,测压管水头线(P-P)总降落趋势更显著。这是因为测压管水头 ,任一断面起始时的总水头E及管道过流断面面积A为定值时,Q增大, 就增大,则必减小。而且随流量的增加阻力损失亦增大,管道任一过水断面上的总水头E相应减 小,故的减小更加显著。 (2)测压管水头线(P-P)的起落变化更为显著。 因为对于两个不同直径的相应过水断面有 式中为两个断面之间的损失系数。管中水流为紊流时,接近于常数,又管道断面为定值,故Q增大,H亦增大,(P-P)线的起落变化就更为显著。 3.测点2、3和测点10、11的测压管读数分别说明了什么问题? 测点2、3位于均匀流断面(图2.2),测点高差0.7cm,H P=均为37.1cm(偶有毛细影响相差0.1mm), 表明均匀流同断面上,其动水压强按静水压强规律分布。测点10、11在弯管的急变流断面上,测压管水头差为7.3cm,表明急变流断面上离心惯性力对测压管水头影响很大。由于能量方程推导时的限制条件之一是“质量力只有重力”,而在急变流断面上其质量力,除重力外,尚有离心惯性力,故急变流断面不能选作能量方程的计算断面。在绘制总水头线时,测点10、11应舍弃。 4.试问避免喉管(测点7)处形成真空有哪几种技术措施?分析改变作用水头(如抬高或降低水箱的水位)对喉管压强的影响情况。 下述几点措施有利于避免喉管(测点7)处真空的形成: (1)减小流量,(2)增大喉管管径,(3)降低相应管线的安装高程,(4)改变水箱中的液位高度。 数字图像处理程序 数字图像处理实验 图像处理实验(一)直方图 灰度变换是图像增强的一种重要手段,使图像对比度扩展,图像更加清晰,特 征更加明显。 灰度级的直方图给出了一幅图像概貌的描述,通过修改灰度直方图来得到图像 增强。 1、灰度直方图 (1)计算出一幅灰度图像的直方图 clear close all I=imread('004.bmp'); imhist(I) title('实验一(1)直方图'); (2)对灰度图像进行简单的灰度线形变换, figure subplot(2,2,1) imshow(I); title('试验2-灰度线性变换'); subplot(2,2,2) histeq(I); (3)看其直方图的对应变化和图像对比度的变化。 原图像 f(m,n) 的灰度范围 [a,b] 线形变换为图像 g(m,n),灰度范围[a’,b’]公式:g(m,n)=a’+(b’-a’)* f(m,n) /(b-a) figure subplot(2,2,1) imshow(I) J=imadjust(I,[0.3,0.7],[0,1],1); title(' 实验一(3)用g(m,n)=a’+(b’-a’)* f(m,n) /(b-a)进行变换 '); subplot(2,2,2) imshow(J) subplot(2,2,3) imshow(I) J=imadjust(I,[0.5 0.8],[0,1],1); subplot(2,2,4) imshow(J) (4) 图像二值化(选取一个域值,(5) 将图像变为黑白图像) figure subplot(2,2,1) 计算机科学与技术系 实验报告 专业名称计算机科学与技术 课程名称计算机组成原理 项目名称微程序控制器实验 班级 学号 姓名 同组人员 实验日期 一、实验目的与要求 实验目的 (1)掌握微程序控制器的组成原理 (2)掌握微程序控制器的编制、写入,观察微程序的运行过程 实验要求 (1)实验之前,应认真准备,写出实验步骤和具体设计内容,否则实验效率会很低,一次实验时间根本无法完成实验任务,即使基本做对了,也很难说懂得了些什么重要教学内容; (2)应在实验前掌握所有控制信号的作用,写出实验预习报告并带入实验室; (3)实验过程中,应认真进行实验操作,既不要因为粗心造成短路等事故而损坏设备,又要仔细思考实验有关内容,把自己想不明白的问题通过实验理解清楚; (4)实验之后,应认真思考总结,写出实验报告,包括实验步骤和具体实验结果,遇到的问题和分析与解决思路。还应写出自己的心得体会,也可以对教学实验提出新的建议等。实验报告要交给教师评阅后并给出实验成绩; 二、实验逻辑原理图与分析 画实验逻辑原理图 逻辑原理图分析 微程序控制器的基本任务是完成当前指令的翻译个执行,即将当前指令的功能转换成可以控制的硬件逻辑部件工作的微命令序列,完成数据传送和各种处理操作。 它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示成为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,称为控制存储器。 三、数据通路图及分析(画出数据通路图并作出分析) (1)连接实验线路,检查无误后接通电源。如果有警报声响起,说明有总线竞争现象,应关闭电源,检查连线,直至错误排除。 (2)对微控制器进行读写操作,分两种情况:手动读写和联机读写。 1、手动读写 6.3实验步骤 (1)对彩色图像的表达和显示 * * * * * * * * * * * *显示彩色立方体* * * * * * * * * * * * * rgbcube(0,0,10); %从正面观察彩色立方体 rgbcube(10,0,10); %从侧面观察彩色立方 rgbcube(10,10,10); %从对角线观察彩色立方体 %* * * * * * * * * *索引图像的显示和转换* * * * * * * * * * f=imread('D:\Picture\Fig0604(a)(iris).tif'); figure,imshow(f);%f是RGB真彩图像 %rgb图像转换成8色索引图像,不采用抖动方式 [X1,map1]=rgb2ind(f,8,'nodither'); figure,imshow(X1,map1); %采用抖动方式转换到8色索引图像 [X2,map2]=rgb2ind(f,8,'dither'); figure,imshow(X2,map2); %显示效果要好一些 g=rgb2gray(f); %f转换为灰度图像 g1=dither(g);%将灰色图像经过抖动处理,转换打二值图像figure,imshow(g);%显示灰度图像 figure,imshow(g1);%显示抖动处理后的二值图像 程序运行结果: 彩色立方体原图 不采用抖动方式转换到8色索引图像采用抖动方式转换到8色索引图像 灰度图像抖动处理后的二值图像 (2)彩色空间转换 f=imread('D:\Picture\Fig0604(a)(iris).tif'); figure,imshow(f);%f是RGB真彩图像 %转换到NTSC彩色空间 ntsc_image=rgb2ntsc(f); figure,imshow(ntsc_image(:,:,1));%显示亮度信息figure,imshow(ntsc_image(:,:,2));%显示色差信息figure,imshow(ntsc_image(:,:,3));%显示色差信息 %转换到HIS彩色空间 hsi_image=rgb2hsi(f); figure,imshow(hsi_image(:,:,1));%显示色度信息figure,imshow(hsi_image(:,:,2)); %显示饱和度信息figure,imshow(hsi_image(:,:,3));%显示亮度信息 程序运行结果: 原图 转换到NTSC彩色空间 流体力学课程实验思考题解答 (一)流体静力学实验 1、 同一静止液体内的测压管水头线是根什么线? 答:测压管水头指γ p Z + ,即静水力学实验仪显示的测压管液面至基准面的垂直高度。测 压管水头线指测压管液面的连线。从表1.1的实测数据或实验直接观察可知,同一静止液面的测压管水头线是一根水平线。 2、 当0 数字图像处理实验报告 实验一数字图像处理编程基础 一、实验目的 1. 了解MA TLAB图像处理工具箱; 2. 掌握MA TLAB的基本应用方法; 3. 掌握MA TLAB图像存储/图像数据类型/图像类型; 4. 掌握图像文件的读/写/信息查询; 5. 掌握图像显示--显示多幅图像、4种图像类型的显示方法; 6. 编程实现图像类型间的转换。 二、实验内容 1. 实现对图像文件的读/写/信息查询,图像显示--显示多幅图像、4种图像类型的显示方法、图像类型间的转换。 2. 运行图像处理程序,并保存处理结果图像。 三、源代码 I=imread('cameraman.tif') imshow(I); subplot(221), title('图像1'); imwrite('cameraman.tif') M=imread('pout.tif') imview(M) subplot(222), imshow(M); title('图像2'); imread('pout.bmp') N=imread('eight.tif') imview(N) subplot(223), imshow(N); title('图像3'); V=imread('circuit.tif') imview(V) subplot(224), imshow(V); title('图像4'); N=imread('C:\Users\Administrator\Desktop\1.jpg') imshow(N); I=rgb2gary(GRB) [X.map]=gary2ind(N,2) RGB=ind2 rgb(X,map) [X.map]=gary2ind(I,2) I=ind2 gary(X,map) I=imread('C:\Users\dell\Desktop\111.jpg'); subplot(231),imshow(I); title('原图'); M=rgb2gray(I); subplot(232),imshow(M); [X,map]=gray2ind(M,100); subplot(233),imshow(X); RGB=ind2rgb(X,map); subplot(234),imshow(X); [X,map]=rbg2ind(I); subplot(235),imshow(X); 四、实验效果 微程序控制器实验报告记录 ————————————————————————————————作者:————————————————————————————————日期: 计算机科学与技术系 实验报告 专业名称计算机科学与技术 课程名称计算机组成与结构 项目名称微程序控制器实验 班级 学号 姓名 同组人员无 实验日期 2015-11-11 一、实验目的 1.掌握微程序控制器的组成原理; 2.掌握微程序的编制、写入、观察微程序的运行情况。 二、实验逻辑原理图与分析 2.1 实验逻辑原理图及分析 微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制硬件逻辑部件工作的微命令序列,以完成数据传输和各种处理操作。它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。微程序存储在一种专用的存储器中,该存储器称为控制存储器,如图所示: 微程序控制器组成原理框图 控制器是严格按照系统时序来工作的,因而时序控制对于控制器的设计是非常重要的,从前面的实验可以很清楚地了解时序电路的工作原理。本实验所用的时序单元来提供,分为四拍TS1、TS2、TS3、TS4。 在微程序控制器的组成中,控制器采用3片2816的E^2PROM,具有掉电保护功能,微命令寄存器18位,用两片8D触发器(273)和一片4D(175)触发器组成。为地址寄存器6位,用三篇正沿触发的双D触发器(74)组成,他们带有清“0”端和预置端。在不判别测试的情况下,T2时刻打入微地址寄存器的内容即为吓一条微指令地址。当T4时刻惊醒测试判别式,转移逻辑满足条件后输出的负脉冲通过强置端将某一触发器置为“1”状态,完成地址修改。 《数字图像处理》 实验报告 学院:信息工程学院 专业:电子信息工程 学号: 姓名: 2015年6月18日 目录 实验一图像的读取、存储和显示 (2) 实验二图像直方图分析 (6) 实验三图像的滤波及增强 (15) 实验四噪声图像的复原 (19) 实验五图像的分割与边缘提取 (23) 附录1MATLAB简介 (27) 实验一图像的读取、存储和显示 一、实验目的与要求 1.熟悉及掌握在MATLAB中能够处理哪些格式图像。 2.熟练掌握在MATLAB中如何读取图像。 3.掌握如何利用MATLAB来获取图像的大小、颜色、高度、宽度等等相关信息。 4.掌握如何在MATLAB中按照指定要求存储一幅图像的方法。 5.图像的显示。 二、实验原理 一幅图像可以被定义为一个二维函数f(x,y),其中x和y是空间(平面)坐标,f 在任何坐标处(x,y)处的振幅称为图像在该点的亮度。灰度是用来表示黑白图像亮度的一个术语,而彩色图像是由单个二维图像组合形成的。例如,在RGB彩色系统中,一幅彩色图像是由三幅独立的分量图像(红、绿、蓝)组成的。因此,许多为黑白图像处理开发的技术适用于彩色图像处理,方法是分别处理三副独立的分量图像即可。图像关于x和y坐标以及振幅连续。要将这样的一幅图像转化为数字形式,就要求数字化坐标和振幅。将坐标值数字化成为取样;将振幅数字化成为量化。采样和量化的过程如图1所示。因此,当f的x、y分量和振幅都是有限且离散的量时,称该图像为数字图像。 三、实验设备 (1) PC计算机 (2) MatLab软件/语言包括图像处理工具箱(Image Processing Toolbox) (3) 实验所需要的图片 四、实验内容及步骤 1.利用imread( )函数读取一幅图像,假设其名为flower.tif,存入一个数组中; 2.利用whos 命令提取该读入图像flower.tif的基本信息; 3.利用imshow()函数来显示这幅图像; 4.利用imfinfo函数来获取图像文件的压缩,颜色等等其他的详细信息; 5.利用imwrite()函数来压缩这幅图象,将其保存为一幅压缩了像素的jpg文件设为flower.jpg语法:imwrite(原图像,新图像,‘quality’,q), q取0-100。 6.同样利用imwrite()函数将最初读入的tif图象另存为一幅bmp图像,设为flower.bmp。 7.用imread()读入图像:Lenna.jpg 和camema.jpg; 8.用imfinfo()获取图像Lenna.jpg和camema.jpg 的大小; 流体力学实验思考题解答 (一)流体静力学实验 1、 同一静止液体内的测压管水头线是根什么线? 答:测压管水头指γ p Z + ,即静水力学实验仪显示的测压管液面至基准面的垂直高度。测 压管水头线指测压管液面的连线。从表1.1的实测数据或实验直接观察可知,同一静止液面的测压管水头线是一根水平线。 2、 当0 学院计算机与通信工程学院专业生物医学工程专业 班级51111 学号5111133 姓名杨静 指导教师贾朔 2014年04月21日 实验一图像的基本运算 一、实验目的: 1、掌握图像处理中的点运算、代数运算、逻辑运算和几何运算及应用。 2、掌握各种运算对于图像处理中的效果。 二、实验内容: 1、(1)选择一幅图像lena8.jpg,设置输入/输出变换的灰度级范围,a=0.2,b=0.6,c=0.1,d=0.9. (2)设置非线性扩展函数的参数c=2. (3)采用灰度级倒置变换函数s=255-r进行图像变换 (4)设置二值化图像的阈值,分别为level=0.4,level=0.7 解:参考程序如下: I=imread('C:\lena8.jpg'); figure; subplot(2,3,1); imshow(I); title('原图'); J=imadjust(I,[0.3;0.6],[0.1;0.9]); %设置灰度变换的范围 subplot(2,3,2); imshow(J); title('线性扩展'); I1=double(I); %将图像转换为double类型 I2=I1/255; %归一化此图像 C=2; K=C*log(1+I2); %求图像的对数变换 subplot(2,3,3); imshow(K); title('非线性扩展'); M=im2bw(I,0.5); M=~M; %M=255-I; %将此图像取反 %Figure subplot(2,3,4); imshow(M); title('灰度倒置'); N1=im2bw(I,0.4); %将此图像二值化,阈值为0.4 N2=im2bw(I,0.7); %将此图像二值化,阈值为0.7 subplot(2,3,5); imshow(N1); title('二值化阈值0.4'); subplot(2,3,6); imshow(N2); title('二值化阈值0.7'); 经济管理学院信息管理与信息系统专业班 __组学号 姓名协作者教师评定_____________ 实验题目_ 微程序控制器实验_________________ 1.实验目的与要求: 实验目的:1.理解时序产生器的原理,了解时钟和时序信号的波形; 2.掌握微程序控制器的功能、组成知识; 3掌握微指令格式和各字段功能; 4.掌握微程序的编制、写入、观察微程序的运行,学习基 本指令的执行流程。 实验要求:按练习一要求完成测量波形的操作,画出TS1、TS2、TS3、TS4的波形,并测出所有的脉冲Φ的周期。按练习二的要 求输入微指令的二进制代码表,并单步运行五条机器指 令。 2.实验方案: 1.用联机软件的逻辑示波器观测时序信号: 测量Φ、TS1、TS2、TS3、TS4信号的方法: (1)按图接线,接一根即可; (2)把探笔的探头端按颜色分别插到试验仪左上角的CH1、CH2,黑探头插CH1,红探头插CH2,将黑探笔的探头插在Φ接线的上孔,将红探笔的探针夹在TS1两针之间; (3)将实验仪的STOP开关置为RUN、STEP开关置为EXEC,“SWITCH UNIT”中CLR开关置为1状态,按动START按键; (4)启动“组成原理联机软件”,点击“调试”菜单下的“显示逻辑示波器窗口”,点击示波器开关,即可在屏幕上看到波形。使用“步数”或“速度”调整波形,波形调整好后,不要用同步通道来稳定波形,应该单击示波器开关,这样整个波形都停下来;(5)鼠标停留在波形线上,会有时间提示,两者相减可以算出波形周期; (6)测完Φ和TS1后,接着测量TS1和TS2,把黑红探针分别夹在TS1两根针之间和TS2两根针之间,相互比较,可以测量TS1 和TS2之间相位关系。同理通过测量TS2、TS3可以测量出TS2数字图像处理实验1
数字图像处理四个实验报告,带有源程序
数字图像处理实验报告
混凝土结构第十一章思考题参考答案
数字图像处理实验指导书模板
微程序控制器实验2
数字图像处理实验 实验二
水力学实验报告思考题答案(想你所要)..
数字图像处理程序
微程序控制器实验
数字图像处理——彩色图像实验报告
流体力学实验思考题解答(全)
数字图像处理实验报告
微程序控制器实验报告记录
数字图像处理实验
流体力学实验思考题解答
数字图像处理实验
计算机组成原理实验3-微程序控制器实验