无刷驱动单轴旋翼系统控制算法设计
无刷直流电机自适应调速控制系统的设计
犇犲狊犻犵狀狅犳犅狉狌狊犺犾犲狊狊犇犆 犕狅狋狅狉犃犱犪狆狋犻狏犲犛狆犲犲犱犆狅狀狋狉狅犾犛狔狊狋犲犿
LuJun1,ChengShiqing1,Huang Haibo1,ChenYufeng1,GaoYun2,WangZhihu2
收 稿 日 期 :2018 12 24; 修 回 日 期 :2019 05 28。 基 金 项 目:湖 北 省 中 央 引 导 地 方 科 技 发 展 专 项 (2018ZYYD007),湖 北 省 科 技 支 撑 计 划 项 目(2015BAA049)。 作 者 简 介 :卢 军(1989 ),男 ,安 徽 宿 州 人 ,硕 士 ,讲 师 ,主 要 从 事汽车电子控制技术方向的研究。 黄 海 波(1974 ),男 ,湖 北 十 堰 人 ,博 士 ,教 授 ,主 要 从 事 汽 车 电 子控制技术方向的研究。
为了使得三相直流无刷电机在各控制系统中得到更好 的运用,设 计 生 产 一 款 稳 定 的、控 制 性 能 优 越、成 本 低 廉 的驱动控制器将成为直 流 无 刷 电 机 发 展 的 重 要 需 求[46]。 本 系统设计的是 基 于 SPANSION MB9BF121K 单 片 机 的 三 相 直流无刷电机控制系统,系统采用上位机实现电机转速设
犓犲狔狑狅狉犱狊:DCbrushlessmotor; MB9BF121K;mixedspeed measurement;adaptivespeedcontrol
0 引 言
直流电动机具有运行效率高、调速性能好等诸多优点 而得以广 泛 的 运 用。 但 传 统 的 直 流 电 动 机 大 都 采 用 电 刷, 以机械换相方式进行换相即有刷电机,由于摩擦等物理因 素进而存在噪声、火 花、无 线 电 干 扰 以 及 寿 命 短 等 弱 点 。 [1] 随着半导体行业的飞跃发展发展,借助位置传感器和电子 换 相 线 路 来 替 代 机 械 换 相 的 直 流 无 刷 电 机 应 运 而 生 [2 3]。
基于硬件FOC的无刷直流电机驱动器设计
基于硬件 FOC 的无刷直流电机驱动器设计邮编:114051摘要:随着科技水平的快速发展,对电机的控制要求越来越高,在工业上:电子装备过程中对电机的控制要求越来越高;在医疗领域中:远程控制手术、医护人员使用设备进行细微手术中对设备电机的精度要求越来越高。
并且目前电子数码消费品、工业控制、无人机、机械臂、云台、仿生机器人等设备的电机均需要高精度的闭环或者开环控制,以实现其精准化。
与有刷直流电机相比,无刷直流电机( brushless DC, BLDC) 用电子换向器取代了机械换向器,因此 BLDC 既具有直流电机良好的调速性能等特点,又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点,广泛应用于电子数码消费品、工业控制、医疗设备、家用电器等领域。
本课题所设计的FOC矢量控制可以使电机的运行更加平稳和高效。
本课题还对传统的电机驱动进行升级改造,并能够实现双路电机同步控制。
并且使用了Simulink电机环境配置软件,进行电路模拟仿真,提高模块的实用性和可行性。
本项目能够实现实物与模型的同步,先基于模型的仿真控制,再进行实物的设计与升级。
关键词:FOC;Simulink;同步控制引言:目前对于电机的控制主要是BLDC,BLDC的驱动控制的方式有方波驱动与正弦波驱动。
方波驱动控制简单,但会产生刺耳的噪音,在电机的低速状态下非常难控制; 尽管正弦波驱动能够做到平滑的换向,在低速状态也具有良好的控制效果,但在高速状态下,由于电流环必须跟踪频率不断升高的弦波信号,还要克服由于振幅和频率不断提高的电机反电动势,当达到控制器的极限带宽时,这种控制就失去了作用。
矢量控制( field oriented control,FOC) 既具有正弦波驱动的平滑控制,又解决了高速状态下失控的问题,并且由于其控制特点,能够使电机运行更加高效。
一、驱动器设计原理FOC实现了电流矢量的控制和机电定子磁场的矢量控制,转矩波动小、效率高、噪声小、动态响应快,FOC技术有低转速下控制,电机换向,力矩控制,我们通过利用硬件设计软件立创EDA设计FOC 控制电路,设计基于STM32F407VET6的电机驱动控制模块,通过简单的焊接,实现FOC的模型化,实现对无刷直流电机的精准化控制, BLDC 的驱动控制的方式有方波驱动与正弦波驱动。
无人机应用知识:无人机的控制系统及算法介绍
无人机应用知识:无人机的控制系统及算法介绍无人机是一种无人驾驶的飞行器,大幅提升了人类的观察、勘察和采集能力。
无人机的控制系统和算法是无人机成功运作的关键,本文将为大家介绍无人机控制系统的工作原理和常用的算法。
一、无人机控制系统的工作原理无人机控制系统的核心是飞行控制器(Flight Controller,FC)。
飞行控制器主要包括传感器、CPU、调制解调器和电源系统等组成,其中传感器和CPU是最为重要的部分。
1.传感器飞行控制器的传感器主要包括以下几种:(1)加速度计(Accelerometer):用于测量飞行器的加速度,确定其加速度的大小和方向。
(2)陀螺仪(Gyroscope):用于测量飞行器的角速度,确定其旋转速度和方向。
(3)磁力计(Magnetometer):用于测量飞行器所处的磁场,确定其所在的方向。
(4)气压计(Barometer):用于测量飞行器所处的高度,确定其海拔高度。
2. CPU飞行控制器中的CPU负责运算和控制,其主要功能包括数据采集、信号处理、控制计算和控制输出等。
通过分析传感器采集的数据,CPU可以得到飞行器的实时状态信息,从而根据预设的控制算法进行计算,输出给各个执行机构控制指令,从而调整飞行器的运动状态。
3.调制解调器调制解调器是飞行控制器与地面站进行通信的设备,主要负责接收地面站发送的指令,并将飞行器状态信息上传到地面站。
4.电源系统飞行控制器需要电源供电,无人机通常使用锂电池作为主要电源。
电源系统设计不当会对飞行控制器的性能产生影响,例如电源电压波动会导致飞行控制器输出的控制指令不稳定。
二、常用的无人机控制算法无人机的控制算法是控制系统重要的组成部分,其好坏直接决定着飞行器飞行的稳定性和精度。
以下是几种常用的无人机控制算法。
1. PID控制算法PID控制算法是一种常见的飞行器控制算法,其作用是通过将飞行器的状态与期望状态之间的误差作为控制量,不断调整飞行器的姿态以尽可能减小误差。
基于STM32的四旋翼飞行器控制系统设计

基于STM32的四旋翼飞行器控制系统设计引言:四旋翼无人机近年来逐渐走向商业化和日常生活化,广泛应用于航拍、货运、农业等领域。
为了保证飞行器的平稳、安全飞行,需要设计一个可靠的控制系统。
本文基于STM32单片机,设计了一种适用于四旋翼飞行器的控制系统。
一、硬件设计1.主控板主控板采用STM32单片机,该单片机具有高性能、低功耗、强大的控制能力等优势。
它能够完成飞行器的数据处理、控制输出等任务。
2.传感器为了获取飞行器的姿态信息,需要使用加速度传感器和陀螺仪。
加速度传感器用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度。
这些传感器通常被集成在一块模块上,直接连接到主控板。
3.遥控器为了实现飞行器的遥控操作,需要使用遥控器。
遥控器通过无线通信与主控板进行数据传输,控制飞行器的起降、悬停、转向等操作。
4.电源管理飞行器控制系统需要提供可靠的电源供电。
因此,需要设计一个电源管理模块,包括锂电池、电池充电管理电路和电源开关等。
二、软件设计1.姿态估计通过加速度计和陀螺仪的数据,使用滤波算法(如卡尔曼滤波)对飞行器的姿态进行估计。
根据姿态的估计结果,可以计算出飞行器的控制输出。
2.控制算法针对四旋翼飞行器,常用的控制算法有PID控制算法和模糊控制算法。
PID控制算法通过比较飞行器的期望姿态和实际姿态,计算出相应的控制输出。
模糊控制算法可以根据模糊规则和模糊集合来计算出控制输出。
3.通信模块为了实现与遥控器之间的无线通信,需要使用无线通信模块,例如蓝牙模块或者无线射频模块。
通过与遥控器进行数据传输,可以实现遥控操作,并接收遥控器发送的命令。
三、控制流程1.初始化飞行器启动时,首先进行传感器的初始化,包括加速度传感器和陀螺仪的初始化。
然后进行电源管理的初始化,确保电源供电正常。
2.传感器数据采集通过传感器采集飞行器的姿态数据,包括加速度和角速度。
3.姿态估计根据传感器采集的数据,使用滤波算法对飞行器的姿态进行估计。
飞行器飞行控制系统设计与实现
飞行器飞行控制系统设计与实现随着科技的不断进步和人类对空中运输的需求日益增长,飞行器成为了现代交通工具的重要组成部分。
飞行器的飞行控制系统是确保飞行器飞行安全和稳定性的核心技术之一。
本文将介绍飞行器飞行控制系统的设计与实现。
一、飞行控制系统的概述飞行控制系统是飞行器飞行过程中的关键系统,其主要功能是对飞行器进行监测、控制和导航。
飞行控制系统由传感器、执行器、控制算法和人机界面等组成。
1. 传感器:飞行控制系统需要通过传感器获取飞行器的姿态、速度、位置、气压等信息,常用的传感器包括陀螺仪、加速度计、磁力计、GPS等。
2. 执行器:飞行控制系统需要通过执行器对飞行器进行控制,常见的执行器包括舵机、电机、螺旋桨等。
3. 控制算法:飞行控制系统需要设计合适的控制算法,通过对传感器数据的处理和分析,控制执行器的工作,实现飞行器的稳定飞行和导航。
4. 人机界面:飞行控制系统还包括与飞行员进行交互的界面,用于输入飞行指令和显示飞行参数。
二、飞行控制系统的设计与实现1. 需求分析:在设计飞行控制系统之前,首先需要明确飞行器的飞行任务和性能需求。
需求包括飞行器的最大飞行速度、载重能力、最大爬升率等。
根据需求分析,确定飞行器的主要参数和性能指标。
2. 系统架构设计:根据需求分析的结果,设计飞行控制系统的整体架构。
一般包括飞行器的导航系统、姿态控制系统和推力控制系统等子系统。
每个子系统都有特定的功能和工作模式,彼此之间需要进行良好的协调和集成。
3. 传感器选择与布置:根据飞行器的需求,选择合适的传感器,并合理布置在飞行器的不同位置。
传感器需要与控制系统进行数据通信,保证传感器的数据准确性和及时性。
4. 控制算法设计:根据飞行器的动力学特性和控制要求,设计相应的控制算法。
控制算法可以根据不同的控制目标,如姿态控制、高度控制等,选择合适的控制策略,如PID控制、模糊控制、自适应控制等。
5. 执行器选择与布置:根据飞行器的需求,选择合适的执行器,并合理布置在飞行器的不同位置。
无人机植保技术 3.项目一 植保无人机部件构成及基础知识(任务四)
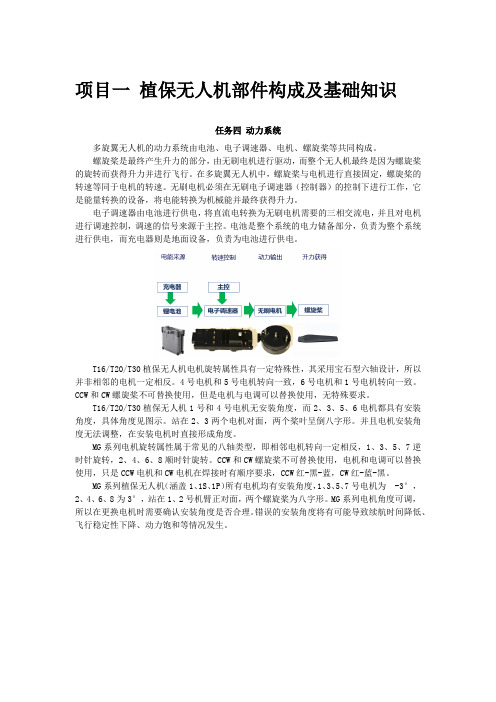
项目一植保无人机部件构成及基础知识任务四动力系统多旋翼无人机的动力系统由电池、电子调速器、电机、螺旋桨等共同构成。
螺旋桨是最终产生升力的部分,由无刷电机进行驱动,而整个无人机最终是因为螺旋桨的旋转而获得升力并进行飞行。
在多旋翼无人机中,螺旋桨与电机进行直接固定,螺旋桨的转速等同于电机的转速。
无刷电机必须在无刷电子调速器(控制器)的控制下进行工作,它是能量转换的设备,将电能转换为机械能并最终获得升力。
电子调速器由电池进行供电,将直流电转换为无刷电机需要的三相交流电,并且对电机进行调速控制,调速的信号来源于主控。
电池是整个系统的电力储备部分,负责为整个系统进行供电,而充电器则是地面设备,负责为电池进行供电。
T16/T20/T30植保无人机电机旋转属性具有一定特殊性,其采用宝石型六轴设计,所以并非相邻的电机一定相反。
4号电机和5号电机转向一致,6号电机和1号电机转向一致。
CCW和CW螺旋桨不可替换使用,但是电机与电调可以替换使用,无特殊要求。
T16/T20/T30植保无人机1号和4号电机无安装角度,而2、3、5、6电机都具有安装角度,具体角度见图示。
站在2、3两个电机对面,两个桨叶呈倒八字形。
并且电机安装角度无法调整,在安装电机时直接形成角度。
MG系列电机旋转属性属于常见的八轴类型,即相邻电机转向一定相反,1、3、5、7逆时针旋转,2、4、6、8顺时针旋转。
CCW和CW螺旋桨不可替换使用,电机和电调可以替换使用,只是CCW电机和CW电机在焊接时有顺序要求,CCW红-黑-蓝,CW红-蓝-黑。
MG系列植保无人机(涵盖1、1S、1P)所有电机均有安装角度,1、3、5、7号电机为 -3°,2、4、6、8为3°,站在1、2号机臂正对面,两个螺旋桨为八字形。
MG系列电机角度可调,所以在更换电机时需要确认安装角度是否合理。
错误的安装角度将有可能导致续航时间降低、飞行稳定性下降、动力饱和等情况发生。
四旋翼飞行器动力控制系统研究与设计
力, 男。Em i 15 22 2 q cr。 — a : 9 36 @q .o l8 n
分量 将 克服 重力 , 飞行 器则 在水 平分 量作 用下 飞行 。
6 8 08
科
学
技
术
与
工
程
1 2卷
同理 , 减小 2( ) 转 子转 速 的 同 时 , 加 4 在 4号 增 () 2 号转 子转 速 , 使得 飞行平 台 向右 ( ) 将 左 飞行 , 同
因此在 设计 中 采 用 了体 积 小 、 量 轻 、 率 高 和 可 重 效 靠 性好 的 无 刷 直 流 电 机 , 设 计 以 ME A 并 G 8单 片 机 为 核心 的电机驱 动控 制 系统 。 四旋 翼 飞 行 器 的悬 停 、 进 后 退 、 转 等 各 种 前 旋 动作都 是 由 四个 转 子 的 速 度 决 定 。 当 四个 转 子 转
阻分压 网络 , 采样 电压 接 入 ME A G 8的 A C D 7通 道 , 可 以测 得 电池 电压 。
2 3 换 相控 制 . 新 西达 X D 2 X 2 1 2电机 采用 三相 星形联 结 , 个
有 很好 的发 展前 景 , 。
子产 生 的反扭 矩 能基 本 抵 消 , 因而 不需 要 传统 直 升
机 的尾翼 。
四旋 翼 飞 行 器 由 电池 驱 动 电 动 机 产 生 动 力 。 传 统 的直 流 电动 机 均 采用 电刷 , 以机 械 方 法 进 行 换 向, 因而存 在 机 械 摩 擦 , 由此 带来 了噪 声 、 花 、 火 无 线 电干 扰 、 寿命 短 、 造 成本 高及 维 修 困难 等 缺 点 。 制
第 l 2卷
第2 4期
2 1 8月 02年
三相直流无刷电机DSP控制系统的设计
1、实现电机的平稳启动和停止; 2、对于不同的负载,电机速度能自动调整; 3、电机位置能够准确跟踪给定位置;
4、在电机运行过程中,能够实时监测电机电流、电压等参数。
参考内容
引言
随着电力电子技术的发展,直流无刷电机(DC Brushless Motor,简称 BLDC)因其高效、节能、维护方便等特点在许多领域得到了广泛应用。而数字信 号处理器(Digital Signal Processor,简称DSP)作为一种强大的实时信号处 理工具,为直流无刷电机控制系统的设计提供了新的解决方案。本次演示旨在探 讨基于DSP的直流无刷电机控制系统的设计与研究。
相关技术综述
直流无刷电机控制系统中,无位置传感器技术和全数字化控制技术日益受到。 无位置传感器技术通过算法估算出电机转子的位置,从而控制电机运转。全数字 化控制技术则利用DSP进行数字化处理,实现电机的精确控制。这两种技术的应 用大大提高了直流无刷电机的性能和可靠性。
系统设计
1、硬件设计
本系统的硬件部分主要包括电源模块、驱动模块、信号调理模块和DSP模块。 其中,电源模块为整个系统提供稳定的工作电压;驱动模块负责驱动电机的三相 绕组;信号调理模块负责采集电机转速等信号,并进行必要的调理;DSP模块作 为主控单元,负责实现各种控制算法。
三相直流无刷电机DSP控制系统的 设计
01 引言
03 参考内容
目录
02 需求分析
引言
随着电力电子技术和微控制器的发展,数字信号处理器(DSP)在电机控制 领域的应用越来越广泛。三相直流无刷电机作为一种先进的电机类型,具有效率 高、维护少、调速性能好等优点,被广泛应用于各种工业领域。本次演示将介绍 如何设计一个基于DSP的三相直流无刷电机控制系统,并对其进行详细阐述。
四旋翼飞行器无刷直流电机调速系统的设计
中图分类号: P T2
文献标识码 : A
文 章 编 号 :1 7 — 2 6 2 1 )2 0 4 — 3 6 4 6 3 (0 1 1— 10 0
De i n o he br s l s sg ft u h e s DC o o o t o y t m n t a o o m t r c n r ls s e o he qu dr t r
翼飞行器 上使用 了新西达 21 2 7外 转 子 式 无 刷 直 流 电机 , 其 结 构 为 l 绕 组 7对磁 极 , 型 K 值 为 1 0 。 2 典 V 0 4 通 常 无 刷 直 流 电 机 的控 制 方 式 分 为 有 位 置 传 感 器 控 制
图 3 三 相 全 桥 驱 动 电 路 图
Fi . Cic i o h e — h s rd e d v r g3 r u t ft r e p a e b g r e i i
电机 的软 启动 。 硬件 结合 实现 了 MO 软 S管 自检 、 流保 护 、 压 保 护 的 功 能 , 高 了 系统 的 安 全 性 。 过 欠 提 实验 表 明 , 速 系 调
统性 能 良好 . 正 常驱 动 新 西 达 2 1 能 2 7外 转 子 式 无 刷 直 流 电机
关键 词 :无 刷 直 流 电机 ;无 位 置 传 感 器 ;调 速 ;四旋 翼 飞 行 器 ;软 启 动
种 状态。
f 控系 飞 制统 行
J 控器 飞● 卜C 行制 I 总 2 线
无通 模 线 信 块}
▲
H
H无赢 犁流
鬃H 端蕊H 犁 无
网 . 压网 , 网
圜
_墼 H H 婆 H
图 2 四旋 翼 飞 行 器 控 制 系 统 结 构 图
blheli 电调 原理
blheli 电调原理
BLHeli电调是一种用于控制无刷直流电机的设备,可以用于多旋翼、飞行器等无人机的控制系统中。
BLHeli电调的原理主要包括以下几个方面:
1. 无刷直流电机控制:BLHeli电调通过对电机三相线圈的驱动方式,实现对电机的控制。
BLHeli电调根据需求向电机的不同线圈提供不同的电流和电压,从而驱动电机实现不同的转速和转向。
2. 电调调速算法:BLHeli电调内部通过调速算法来控制电机的速度。
调速算法可以根据输入信号(如遥控器输入的油门指令)和系统反馈(如电机的转速反馈)计算出合适的电机驱动参数,以使电机能够根据指令精确地调整转速。
3. 电机驱动保护:BLHeli电调还具备多种保护功能,用于保护电机和电调本身不受损坏。
例如,过压保护可以防止电压过高时对电机的损害,过温保护可以防止电机过热导致损坏,低电压保护可以防止电机因电池电压不足而无法正常工作。
4. 通信协议:BLHeli电调还支持与飞控系统进行通信,以接收飞控系统发送的指令,并反馈电机状态等信息给飞控系统。
通常使用PWM(脉宽调制)信号作为通信接口,通过调整PWM信号的占空比来控制电机的转速。
总之,BLHeli电调通过控制电机的电流、电压和相序实现对
电机的驱动,通过调速算法和保护功能来控制电机的速度和保护电机,同时与飞控系统进行通信以实现对电调的控制和状态反馈。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷驱动单轴旋翼系统控制算法设计 摘 要
现在随着科技知识的普及,大家对航模、旋翼飞机之类的科技产品都比较感兴趣。这类产品的主要控制原理相似,很多都是对直流电机的控制。 单轴旋翼系统就是其中的一个例子,它主要是通过用单片机控制电机的转速,从而达到控制电机位置的目的。主要的控制原理就是利用单片机控制PWM波的输出,从而调节电机的转速,使其可以停留在设定的位置上。 单轴旋翼系统使用AVR ATMEGA 328P单片机作为控制器,使用无刷电机驱动旋翼,使用微机电传感器姿态检测加速度、角速度、方位角。利用计算机发出位置指令,单片机接收到位置指令后,通过传感器检测实际位置,控制旋翼的旋转速度,使主轴运动到设定位置上。使用matlab设计控制算法,使重物能够稳定、准确、快速响应给定指令。 建立单轴旋翼系统的数学模型。数学模型,一般是指用数学语言、符号或图形等形式来刻画、描述、反映特定的问题或具体事物之间关系的数学结构。广义地讲,一般表现为数学的概念、法则、公式、性质、数量关系等。数学模型具有一般化、典型化和精确化的特点。 选择系统的控制方法是PID控制法,PID控制就是由比例环节、积分环节、微分环节组成的一种闭环控制方式。本设计主要选用了比例环节、积分环节和微分环节。 并且用SIMULINK对PID控制算法进行模拟仿真。SIMULINK,是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号处理的复杂仿真和设计,适当的调节比例环节、积分环节和微分环节的参数,可以使系统达到稳定、准确、快速。
关 键 词:数学模型,pid控制算法,Simulink仿真,稳定、准确、快速 Uniaxial rotor system control algorithm design ABSTRACT With the popularization of scientific and technological knowledge, the class of model aircraft, rotorcraft technology products are more interested. DC motor control is similar to the main control principle of such products. Single spindle rotor system is one example of this, It is mainly by using single chip microcomputer control motor rotational speed, thus achieve the goal of control of motor position. Main control principle is the use of single-chip microcomputer control PWM wave output, so as to adjust the rotation speed of motor, make it can stay on the set position. Single spindle rotor system using AVR ATMEGA 328 p single chip microcomputer as controller, using brushless motor driven rotor, using micro-electro-mechanical sensor detect acceleration, angular velocity and azimuth. With position instruction from a computer, microcontroller receives the position command, the actual location by sensor, control the rotation of the rotor speed, make main shaft movement to set position. Design control algorithm, use matlab to make weight can be stable, accurate, fast in response to a given command. A mathematic model of the single shaft rotor system. Mathematical model, generally refers to the use of mathematical language, symbols or graphics to depict, description, reflect a specific problem or the mathematical model of the specific relationships between things. Broadly speaking, the general expression for the mathematical concepts, principle, formula, properties and quantitative relation, etc. Mathematical model has the characteristics of typical generalization, and high-precision. Selection control method of the system is PID control, PID control is the chain of proportion, integral element, differential links form a closed loop control method. This design mainly use the proportional and differential, integral link link. PID control algorithm and using SIMULINK simulation. SIMULINK, which is one of the most important component of MATLAB, it provides a dynamic system modeling, simulation and comprehensive analysis of the integration of the environment. In the environment, without a lot of writing program, and just through simple and intuitive the mouse operation, can construct a complex system. Simulink are adaptive area wide, clear structure and process and the simulation precision, practical, high efficiency, flexible etc, And based on the above advantages of Simulink has been widely applied in the control theory and complex simulation and design of digital signal processing, Regulation of appropriate proportion link and differential, integral link link parameters, can make the system to achieve stable, accurate and rapid.
Key words: mathematical model, pid control algorithm, Simulink simulation, stable, accurate and rapid 1
前 言 为了提高学生的课余活动的质量和种类,现在大家都提倡做一些集科技性、知识性、趣味性、实践性于一体的活动,从而越来越多的人热衷于航模、车模之类的活动。单轴旋翼直流电机的控制就是航模中最基础的控制系统,在此基础上还可以扩展为两旋翼、四旋翼等系统,非常具有研究前景。 该设计的单轴旋翼控制系统是靠控制电机的转速来实现的。电机上带有螺旋桨,电机依靠升力来调整位置。通过加速度传感器测得电机的实际位置,若实际位置低于设定位置,则使电机的转速增大,使其产生更大的升力,从而可以让电机的位置上升;若电机的位置高于设定位置,则降低电机的转速,使其升力减小,从而使电机位置下降,靠近设定位置,或是可以让电机反转落到设定位置。电机可以在垂直方向上60度的范围内自由转动。 整个系统是采用反馈调节的方式,利用闭环控制来实现电机的位置控制,也就是在反馈原理的基础上,通过检测偏差再纠正偏差的控制方式。闭环控制系统具有抑制烦扰的能力,对于元件特性变化不敏感,并善于改善系统的响应特性。 我们采用数学建模的方法,构造杆,螺旋桨和电机的数学模型,并计算出该系统的传递函数。选择系统的控制方法是PID控制法,PID控制就是由比例环节、积分环节、微分环节组成的一种闭环控制方式。本设计主要选用了比例环节、积分环节和微分环节。并且运用simulink仿真软件对pid算法进行仿真,通过不断调节pid各参数的使得整个系统是一个自动控制系统,自动控制螺旋桨转速产生合适的升力,使木杆悬浮在指定角度。可以实现: 1. 稳定。在外界扰动的情况下仍能正常工作; 2. 准确。尽量小的稳态误差; 3. 快速。快速运动到设定角度; PID算法是指在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点。