MOSAIC 拼接设置
ERDAS操作技巧

ERDAS操作技巧加载波段成影像:interpreter---utilities---layer stackERDAS 操作⼩技巧:1、配准影像图:从Viewer 中打开两幅图(⼀幅参照,⼀幅配准)从菜单栏Raster 中选Geometric correction (⼏何校正)在Set Geometric Model 中选Polynomial ,后点击ok ,打开Polynomial Model Properties 对话框,在Parameters 中Polynomial Order (多项式次⽅)中选1或2[最少GCP 公式:2)2)(1++n n (],在Projection (投影参数)中Map Units 选Meters 点击Add/Change Projection 在Custom 中选择所需的Projection Type ,Spheroid Name ,Datum Name ,Scale factor at central meridian ,Longitude of central meridian (可以参考参照图中Imagine info 中的信息),Latitude of origin of projection ,False easting (⼀般选500000meters ),False northing (⼀般忽略为零),点击Ok Set Projection from GCP Tool 中选择Collect Reference Point From (选择视窗采点模式)中的 Existing Viewer 选项,Ok 。
RMS 误差(均⽅根)=22)()i r i r y y x x -+-(这⾥:x i 和y i 是输⼊的原坐标;x r 和y r 是逆变换后的坐标定义:RMS 误差是指GCP 的输⼊(原)位置和逆变换的位置之间的距离(或者说是在⽤转换矩阵对⼀个GCP 作转换时,所期望输出的坐标与实际输出的坐标之间的偏差)。
QMosaic操作手册

多条带侧扫声呐图像精拼接方法研究
2021年5期创新前沿科技创新与应用Technology Innovation and Application多条带侧扫声呐图像精拼接方法研究*高飞1,王晓2*,杨敬华2,张博宇2,周海波2,陈佳星2(1.青岛市勘察测绘研究院,山东青岛266032;2.江苏海洋大学海洋技术与测绘学院,江苏连云港222005)引言随着陆地资源日益枯竭,世界各国已将资源开发和利用的重点转向海洋,我国为此制定了“海洋强国”战略。
针对海洋的勘察活动日益增多,了解海底表层及浅表层结构对海洋科学研究和海洋工程建设意义重大[1]。
侧扫声呐(Side Scan Sonar ,SSS )作为海底高分辨率图像的快速获取技术,在海洋工程建设、海底资源开发和目标探测、识别等领域应用广泛[2-7]。
由于侧扫声呐拖曳式作业和海洋中潮汐、波浪等环境影响,由测量船GNSS 坐标推算所得托鱼位置存在偏差,地理编码图像位置不准,因此,多条带编码拼接图像存在相邻条带目标错位问题;常用的国外数据处理软件诸如Isis (Triton )、Sips (Caris )、SonarWeb (Chesaspeake )等,均提供地理拼接功能[8,9],不能实现海底地貌“一张图”精细获取。
为解决此问题,Zhao等[10,11]提出了相邻条带SSS 图像SURF 特征拼接方法,为解决SURF 特征匹配耗时问题,采取了基于航迹坐标的图像分段策略,一定程度上提高了运算效率;王爱学等[12]顾及目标的局部畸变问题,给出了弹性匹配策略,实现了共视海床目标的绝对保形;郭军[13],倪先锋[14],侯雪[15],伍梦[16],潘建平[17]等也研究了相关SSS 图像SURF 特征拼接问题;但前述所有方法SURF 特征匹配耗时均不能满足大区域图像拼接程序实时处理的要求。
且传统特征拼接时,固定一幅图像,旋转变换其余条带,最远端条带图像拼接后,地理位置丢失;若存在不能特征拼接条带,也无法联合地理编码和特征实现海底地貌“一张图”精细获取。
遥感图像处理流程
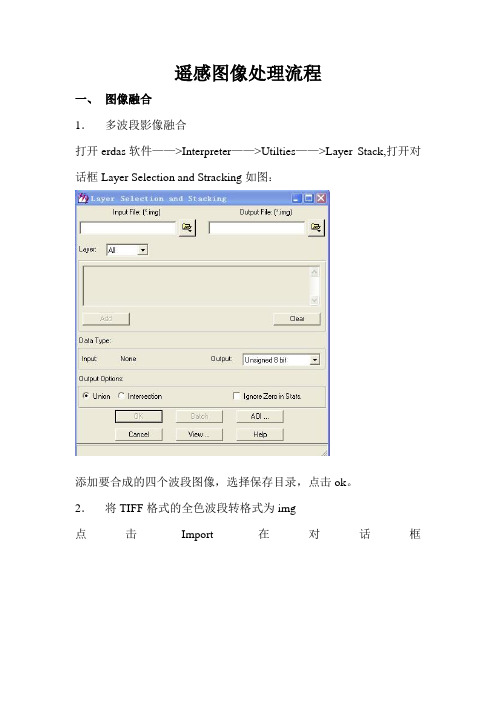
遥感图像处理流程一、图像融合1.多波段影像融合打开erdas软件——>Interpreter——>Utilties——>Layer Stack,打开对话框Layer Selection and Stracking如图:添加要合成的四个波段图像,选择保存目录,点击ok。
2.将TIFF格式的全色波段转格式为img点击Import在对话框分别选择“Import”,type选择“TIFF”,点击ok完成转格式。
3将两张全色图像拼接Erdas——>Data prepertion——>Mosaic images——>Mosaic Tools打开对话框如图,点击Edit add images,添加两幅全色影像图如图点击在出现的工具栏点击出现对话框,选择第一项自动生成合成范围如图点击process→run Mosaic,输出合成图像。
注:平时我们处理图像时可以选择自主划线,所画的线(可以是shp格式)应该避免与现状物体相切,迫不得已需要相交时,尽量斜相交。
4.重采样:先将已知坐标系统变换到另一个坐标系统,然后估计函数在-新坐标系统下的数值。
Erdas——>Data prepertion——>Mosaic images——>Mosaic Tools Edit→add images添加影像图点击Edit→output image options根据影像图的分辨率修改,淮南数据全色为2.5,多分辨率为10。
输出数据,完成重采样。
5.分别切出全色图像和多光谱图像重合部分打开ARCGIS,新建面图层,画出两幅图的重叠区域保存切图(略)6.全色图像和多光谱图像的融合Erdas→Interpreter →spatial Enhance →Resolution mergerHigh resolution input file选择全色图像,multispectral input file选择多光谱图像,method选择第一个,resampling选择第三个主成份。
新旧桥梁拼接技术和应用论文
新旧桥梁拼接技术探讨和应用摘要:随着国民经济的发展,公路交通的运输量大幅度增长,车流量越来越大,原有道路通行能力趋于饱和,对原有道路的改扩建施工是今后几年公路建设的重要组成部分。
在对道路的改扩建施工中,往往需要对新旧桥梁进行拼接施工,而影响拼接的因素有以下几种:(1)老桥沉降相对过大;(2)新桥基础沉降;(3)新桥上部结构收缩、徐变;(4)后浇拼接混凝土收缩、徐变;(5)、原桥的车辆荷载。
关键词:拼接、沉降、收缩、徐变abstract: along with the development of national economy, highway traffic traffic volume increased, more and more cars, the original road traffic capacity tend to be saturated, the expansion of the original road construction is in the next few years is an important part of highway construction. in the construction of roads and expansion, it is often required to new and old bridge construction mosaic, and influence factors of joining together have the following kinds: (1) the old bridge settlement relative too big, (2) the new bridge foundation settlement; (3) xinqiao upper structure shrinkage, creep; (4) the pouring concrete shrinkage, creep joining together; (5), the original bridge vehicle load.keywords: joining together, settlement, shrinkage, creep中图分类号:u445 文献标识码:a 文章编号:前言目前我国经济正进入工业化、信息化的跳跃式发展阶段,经济的快速发展,需要方便、快捷、安全的交通服务,高速公路对国民经济和社会发展的促进作用是越来越明显。
10.ArcGIS影像数据处理

5.1ArcGIS支持的影像格式
中国科学院计算技术研究所教育中心
ArcGIS支持IMG,TIFF,GRID,JPEG,JP2,BMP,GIF,PNG等格 式
Page 29
5.2各种影像数据格式介绍
中国科学院计算技术研究所教育中心
BMP格式是最简单,基本就是图像点阵的内存拷贝。没有任 何压缩,也无法表示格外的数据。 缺点占用的空间大。
5-6都是矩形,要输入矩形范围
2-3需要输入点的坐标
4是Circle,要输入圆心(x,y)和半径
Inside是内部 ,outside是外部
Page 13
Extract by Mask
中国科学院计算技术研究所教育中心
是多边形切割,可以按一个已有矢量和影 像的范围切割影像
矢量图范围切割,输出格式由文件扩展名指 定,tif,img,没有扩展名是grid
3、加载影像,左键点击影像左下点,右键 输入对应控制点,输入对角,再是左上,最后更新配
准, 4、更新影像坐标系统和地图一致,
Page 4
配准后文件分析
中国科学院计算技术研究所教育中心
g-48-111-14.jgw是配准文件
RRD是金子塔信息
AUX,是一个用来保存栅格文件自身不能保 存的辅助信息的文件,它与栅格文件一起 存在同一目录中,文件名与栅格文件一致。
Page 21
新建Raster Catalog
中国科学院计算技术研究所教育中心
在geodatabase中右键,可以将多个raster放 在一起,下面的raster mangement type十分 重要。
Page 22
Raster Catalog装入影像
中国科学院计算技术研究所教育中心
气象雷达拼图在航空管制中的运用WeatherRadarMosaicintheUse
气象雷达拼图在航空管制中的运用Weather Radar Mosaic in the Use of the Air Traffic Control郭炜峻 陈绍伟(中国民用航空厦门空中交通管理站,厦门市,福建省,361006)摘要:为加强对大范围强对流天气的监视能力,提高航空飞行安全的保障能力,本文尝试讨论应用于航空管制的气象雷达拼图方法,向管制员开发拼图系统。
关键词:气象雷达拼图航空管制1.引言如何帮助管制部门和航空公司实现飞行的安全、快捷,是航空气象服务的主要任务。
随着飞行量的快速增长,强对流云活动对飞行的影响越来越大,如何在强对流云影响时,在保证飞行活动安全的同时提高空域的利用效率,是困扰管制部门和航空公司的一个难题。
强对流云活动经常伴随雷电、强降水、微下击暴流、冰雹、龙卷、积冰、颠簸等危险天气,它们对航空安全威胁很大,经常导致大量航班的绕飞、返航或延误。
在没有辅助工具的情况下,管制员仅凭机组的飞机报告,是很难掌握雷雨的分布情况的,因此管制部门希望能及时获取气象雷达资料,以便于更为直观地观察和监视危险天气的所在区域,及时调度飞机避让。
因此加强对强流云的监视和预警,对保障航空飞行安全、增强流量管理效能都有积极的意义。
早期对大面积区域强对流监视主要依赖卫星云图,但其时间间隔长,空间分辨率较低,且高云对中低云有显著的遮挡作用,因此逐渐被时空分辨率更好的气象雷达资料所取代。
单部雷达探测范围有限,大范围的监视需要多部雷达共同协作,但每部雷达资料又都是相互独立的,为实现综合利用多部雷达资料,雷达拼图技术得到发展。
美国从下一代雷达(NEXRAD)布网成功就开始全国范围的拼图试验,国内地方气象系统近些年也做了许多有益的研究,而国内民航系统这方面的应用还较少,因此我们尝试将气象雷达拼图应用于航空管制方面做一些初步摸索。
2.资料介绍国内民航系统仅部分机场安装气象雷达,不能连接成片,雷达型号参差不齐,技术参数差异较大,拼图存在一些技术难题。
基于特征点的图像拼接方法
基于特征点的图像拼接方法张东;余朝刚【摘要】提出了一种基于特征点匹配的全景图像拼接方法.该方法首先利用sift算法提取各图像中的特征点并利用Harris算法对图像特征点提取进行了优化,然后采用基于K-d树的BBF算法查找和确定初始匹配点对,完成特征点的粗匹配,再根据图像配准结果使用稳健的RANSAC算法对粗匹配的特征点进行筛选,计算出图像间变换矩阵H,最后采用渐入渐出的加权平均的融合算法对两幅图像进行无缝拼接,形成一幅完整的全景画面.实验结果验证了该方法的有效性,拼接效果较好.%This paper proposes a panoramic image mosaic method based on feature points matching. This method firstly uses the sift algorithm to extract the image feature points and uses Harris algorithm to optimize the image feature extraction. Then the BBF algorithm based on K-d tree is used to find and determine the initial matching points and complete the coarse matching of the feature points. Then according to the result of image registration, robust RANSAC algorithm is utilized to filter coarse matching feature points and calculate the transformation matrix H. Finally, the gradually fading out fusion algorithm of the weighted average is used in the seamless Mosaic of two images, form a complete panoramic view picture. Experimental results verify the effectiveness of the proposed method and the splicing effect is better.【期刊名称】《计算机系统应用》【年(卷),期】2016(025)003【总页数】6页(P107-112)【关键词】图像拼接;sift特征点;图像配准;RANSAC;变换矩阵【作者】张东;余朝刚【作者单位】上海工程技术大学城市轨道交通学院,上海 201620;上海工程技术大学城市轨道交通学院,上海 201620【正文语种】中文随着计算机图像处理技术的不断发展, 全景图在生活中有着广泛的应用, 通常由于各种条件的制约, 人们往往很难拍出宽视角、高分辨率的全景图像, 因此, 可实现多幅图像无缝拼接的图像拼接技术应运而生.图像拼接就是将同一幅场景中有相互重叠的多幅图像拼接成大幅面、宽视角、失真小且没有明显缝合线的高分辨率图像[1]. 目前, 图像拼接算法主要可以分为两类: 一类是基于区域相关的图像拼接算法; 另一类是基于特征相关的图像拼接算法. 第一类是从图像的灰度值出发, 通过计算两幅图像的灰度相关性来确定相似程度, 得到拼接图像重叠区域的位置和范围,实现图像拼接; 而基于特征的拼接方法是通过提取图像特征点来对图像重叠部分的对应特征区域进行搜索匹配, 该类算法有比较高的稳定性, 应用也比较广泛[2]. 近年来, 国内外研究人员提出了多种图像拼接算法, Lowe等人在2003年提出了完整的sift算法[3], 该算法将特征点检测、描述和匹配整合为一个统一的过程; Yanke等[4]针对sift算法计算量大、耗时长这一缺点, 提出了PCA-SIFT改进算法, 但计算量并未减少, 且对原有的特征点提取部分并没有改进; 赵向阳、杜立民[5]提出了一种基于特征点匹配的拼接算法, 其中使用Harris 算法[6]提取角点并进行匹配, 该算法使用鲁棒变换估计技术, 一定程度提高匹配算法的稳健性, 但计算速度较慢.本文结合sift算法和harris算法各自的特点, 首先提出了改进的sift算法来提取待拼接图像的特征点; 然后通过BBF算法搜索查找匹配点对, 进行粗匹配, 并结合RANSAC算法实现图像特征点的精确匹配, 同时估计出图像间的变换矩阵; 最后根据变换矩阵采用加权平均的融合方法进行图像的无缝拼接得到全景图像.1.1 sift特征提取算法尺度不变换特征(Scale Invariant Feature Transform, SIFT)是1999年由Lowe 提出的一种提取局部特征的算法, 它在尺度空间中寻找极值点, 并提取出其位置、尺度、旋转不变量. 其实现主要包括4个步骤: 尺度空间的构建; 空间极值点检测; 确定特征点方向; 生成特征描述符. 下面将详细介绍sift特征提取的流程.①尺度空间的构建在不同的尺度下观察一幅图像, 成像是不同的, 我们寻找的局部点就是那些图像尺度发生变化, 但其自身的相对位置仍保持不变的特征点. 而高斯核被证明是唯一的线型卷积核, 因此采用高斯卷积核对初始图像进行一系列的尺度变换.首先我们使用高斯函数与图像进行卷积运算对图像进行若干次的连续滤波处理建立了第一个尺度组. 然后对图像进行降采样运算将图像尺寸减小到原来的一半, 进行同样的高斯滤波形成了第二个尺度组, 之后重复上述操作直到图像小于某一给定的阈值为止. 最后对每个尺度组的高斯图像进行差分运算得到高斯差分图像, 即DOG 图像[7].DOG可由下式求得:其中, 是尺度可变的高斯卷积核, , 为二维图像, 为卷积运算, 是空间坐标, 是尺度空间因子.②空间极值点检测得到了高斯差分图像以后, 接下来就要对特征点进行检测. 本文选取这些高斯差分图像中的局部极值点作为图像的特征点, 在尺度空间极值点的检测过程中, 每一个采样点要和它所有的相邻点进行比较, 为了确保检测出来的特征点不仅是二维空间上的局部极值而且还是尺度空间中的极值, 除底层和顶层外中间层次的每个检测点都要和它同尺度的8个点和上下相邻尺度的92个点共26个相邻像素点进行比较, 如果该点为极值点, 就认为其是图像在该尺度下的一个特征点.此时得到的极值点中有不稳定的点, 这些点对噪声敏感, 这将影响后续匹配的稳定性和鲁棒性, 因此要对极值点进行精确定位, 去除那些对比度低的特征点和不稳定的边缘响应点. 根据Lowe的研究, 通过三维二次方函数可以确定采样点的位置. 尺度函数的二阶泰勒展开式为:式中表示特征点与采样点之间的尺度和位置偏移, 对上式求导并另其等于0, 得到了极值点位置 , 将的值带入式(2)运算求得极值的大小为, 判断其绝对值大小, 如果小于某阈值, 判定该点不稳定将其舍弃, 保留下来的极值点即作为特征点.③确定特征点方向利用特征点邻域像素的梯度方向分布特征为每一个特征点指定方向参数, 处的梯度值和方向分别为:以特征点为中心, 对它的邻域像素采样, 并用梯度方向直方图进行统计, 直方图每为一个柱将到分为36个柱, 直方图的峰值则代表了该像素特征点处邻域梯度的主方向, 即为该特征点的主方向. 当存在另一个与主峰值能量相当的峰值时, 将这个方向作为该特征点的辅方向.④生成特征描述符得到特征点主方向以后, 旋转特征点主方向, 使之与坐标轴方向重合, 然后在旋转后区域内取以特征点为中心的1616像素大小的邻域, 并将它分成16个44的子窗口区域, 每个子窗口区域形成一个8维向量种子点, 这样就构成了一个168=128维的特征向量, 即为sift特征向量描述符[7].1.2 改进sift特征提取算法根据Lowe的研究, 使用sift算法对物体进行识别时, 如果能够匹配的关键点达到3个以上, 则可以确定该图像中存在目标物体, 因此在图像拼接过程中只需要少量的特征点就可以完成对重叠部分的匹配, 然而, 对于一幅512512的图像, 一般可以检测出1000个左右的特征点, 在增强鲁棒性处理之后, 仍可以达到200到500个特征点, 在拼接时相当大部分的时间都用在了检测冗余的特征点上.本文利用Harris算法对sift算法进行了改进, 上文中假设采用sift算法共获取了N 个特征点, 每个特征点包含3个信息: 位置、尺度和方向, 可以表示为 , , 其中, 、表示特征点的位置信息, 表示特征点的横坐标和纵坐标, 和分别表示特征点的尺度和方向信息. 利用这些信息可以计算Harris角响应值, 表示计算自相关矩阵时的高斯加权函数的标准差. 矩阵表示为:式中为高斯加权函数, 为方向的梯度, 为方向的梯度, 自相关矩阵M具有两个特征值和 , 它同矩阵M的曲率成正比, 因此可以得到Harris角点的响应函数为:通常取值0.04到0.06, 计算所有特征点响应值并计算其绝对值的累加, 然后求其均值的一半作为阈值, 表达式如下所示:若则剔除该特征点, 保留下来的点则作为改进sift算法提取出的特征点2.1 基于K-d树的匹配算法特征点的匹配可以采用穷举法来完成, 但是这样的话会消耗大量的时间, 因此, 一般采用基于K-d树的数据结构来完成匹配搜索. 搜索的内容是与匹配目标图像特征点最邻近和次邻近的原始图像特征点. K-d 树是分割k 维数据空间的一种数据结构, 每个数据结点表示k 维空间的一个点. 每一层都是根据该层的判决器来对相应对象做出分枝决策, 顶层结点按由判决器决定的一个维度来进行划分, 下一层则按照该层的判决器决定的一个维进行划分, 同理在余下各维之间不断地划分. 直至一个结点中的点数少于给定的最大点数时, 结束划分[10].当用到高维数据搜索问题时, 这种方法的效率明显下降, 针对这一问题, 提出了基于K-d树的BBF算法[11], 这种算法的实现依靠一个优先级队列, 队列成员是按照搜索节点与目标节点之间距离的升序排列的. 在搜索中, 当依靠 K-d 树判决器值的决策沿某个分支方向搜索某个节点时, 一个元素会被加入到优先级队列, 此元素记录了该节点未被搜索分支的信息, 主要包括当前节点与目标节点之间的距离和当前节点在K-d树中的位置. 当一个叶节点搜索到后, 由优先级队列中队首元素的信息按相同方法搜索包含下一近邻节点的其他分支, 并删除队首元素. 在指定数量的节点搜索完后, 结束搜索, 将按距离升序排列的指定数量的近似近邻结果返回.利用基于K-d树的BBF算法进行匹配: 首先, 采用BBF算法找出目标点与待匹配点欧式距离最近的K个点, 因sift特征向量的维数很高, 使很多非匹配点与待匹配点之间的距离集中在一起. 因此使用最近邻中的最小距离点和次小距离点比较, 并设置一个阈值T , 如果两者的比值大于阈值T, 则说明待匹配特征点没有匹配点, 否则, 则匹配成功. 具体做法如下:在BBF搜索中, 假设找到了K个待匹配特征点p的近似最邻近特征点, 则K个特征向量表示为: , 且 (距离按升序排列), 对于匹配点的判断可用下式进行:其中, 表示为向量与之间的距离, 若上式成立, 则为匹配的特征点, 否则, 匹配失败. 使用上述基于K-d树的BBF算法搜索匹配获得的匹配点对通常存在一定数量的误匹配. 为此, 本文采用了RANSAC算法进一步完成匹配工作.2.2 RANSAC算法RANSAC(Random Sample Consensus)算法[12], 即随机抽样一致性算法, 是在矩阵估计、模式识别中最常用的对特征点进行提纯的方法. 根据一组包含错误数据的样本集计算出数据的数学模型参数, 得到有效样本数据, 也就是说首先提出假设的模型, 再通过已知数据进行验证, 判定出该模型是否成立. 通过最优模型的建立, 可以判断出不符合模型的外点, 也就查找出了特征点粗匹配中的误匹配, 然后剔除误匹配, 达到提纯的效果. 本文采用RANSAC算法对图像进行精确匹配, 同时得到图像间变换关系, 具体步骤如下:①待拼接的两幅图像之间由于存在一部分的重叠区域, 它们之间是存在相应变换的, 本文采用的是投影变换模型来准确的描述图像之间的关系, 投影变换模型可以准确描述图像间存在的变换情况, 不仅可以对图像的旋转、缩放、平移和规则性的变换准确描述, 也可以对一些不规则的变换进行描述. 变换公式为:式中, h11、h12、h21、h22为缩放及旋转因子, h13、h23为平移因子, h31、h32为仿射因子.②在粗匹配的匹配点集S中随机抽取4对匹配点, 判断其中是否有3点共线的, 若有则舍弃重新随机抽取, 直至4对匹配点中无3点共线的情况. 得到4对匹配点后计算其对应的变换模型.③上一步确定了一个模型之后, 需要匹配点集S中所有的数据来验证该模型的有效性, 即计算所有的粗匹配点是否满足该模型. 能被模型描述的点定义为内点, 相反, 不能被模型描述的点定义为外点. 统计出内点数量, 分别求出内点匹配点和变换点之间的欧式距离, 再进行求和处理. 距离之和公式如下:式中为满足模型的内点数量.④通过设定阈值来判断该距离之和是否满足该阈值来选择模型参数.⑤重复②③两步, 更新变换模型, 直至得到最优模型为止, 根据最优模型的内点来计算最终的模型参数, 即为所要求的变换矩阵, 并用实现图像的配准[13].经过图像匹配后, 根据图像间变换矩阵可以对相应图像进行变换来确定图像间重叠区域, 对图像进行拼接形成一幅全景图像. 需要注意的是, 由于相机角度和曝光时间的各种差异导致拍摄到的图像可能存在亮度上的差异, 图像边缘可能出现失真现象, 这样会导致拼接后的图像缝合线处出现明显的明暗变化. 为了消除图像拼接缝隙, 实现无缝拼接, 要对图像拼接处的缝合线进行平滑处理[14]. 本文采用渐入渐出的加权平均融合法.加权平均融合法类似于直接平均法, 但其重叠区域的像素值不再是简单的叠加, 而是先进行加权后再叠加平均. 假设为融合之后的图像, 、是待拼接的图像, 拼接后图像如公式(6)所示为:式中和分别是第一幅和第二幅图像重叠区域对应像素的权值, 并且满足 , , 选择合适的权值可以使重叠区域实现平滑过渡, 同时可以消除拼接缝隙.本文主要实现的是基于sift特征点匹配的全景图像拼接功能, 实验是在参数为Intel Core i3-350M 2.27G/2G/Visual Studio 2012的PC机上加以实现. 首先利用相机拍摄两幅不同视角的图片, 提取其特征点, 然后采用基于K-d树的BBF算法对特征点并进行粗匹配; 再利用RANSAC算法对粗匹配进行提纯, 删除“外点”, 得到筛选后的匹配点对; 利用这些匹配点对计算图像间变换矩阵, 采用渐入渐出的加权平均法进行融合得到拼接图像, 如图1所示.图1中, (a)、(b)是两幅原始图像, (c)、(d)为特征点的提取图像, 其中(c)图检测到特征点473个, (d)图检测到特征点398个, (e)为采用BBF算法匹配后的图像, 共有178个匹配点, 匹配时间为0.125秒, 可以看出, 在这178个匹配点中存在的误匹配对数比较多, (f)为RANSAC算法匹配后的图像, 匹配时间为0.082秒, 可以看出经过RANSAC算法提炼后基本无误匹配点对, 计算出变换矩阵后, 对图像进行拼接, (g)为直接进行拼接效果图, 重叠区域有明显明暗变换, (h)为使用渐入渐出的加权平均融合算法得到的拼接图像, 由图(h)可知, 图像拼接效果较好, 没有明显的亮度差异, 视觉效果自然.为了验证该方法的有效性, 使用数码相机拍摄了4幅图片进行拼接实验, 每幅图片之间有大约30%到50%的重叠区域, 如图2所示上下左右四幅图像, 图3为拼接的效果图, 由结果可以看出处理后拼接痕迹消除, 实现了重叠区域的平滑过渡, 效果良好, 得到了高品质的全景图像.本文主要对基于特征点的图像拼接算法进行了研究, 利用改进的sift算法提取图像的特征点, 并结合RANSAC算法实现了相邻帧图像特征点的精确匹配, 利用变换投影模型估计出两幅图像之间的变换矩阵, 最后利用渐入渐出的加权平均融合算法消除了图像拼接处的缝合线和色彩差异, 实现了全景图像的高质量拼接.1 Brown M, Lowe DG. Automatic panoramic image stitching using invariant features. IJCV. 2007. 59–73.2 汪华琴.基于特征点匹配的图像拼接方法研究[学位论文].武汉:华中师范大学,2007.3 Lowe DG. Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60(2): 91–110.4 Ke Y, Sukthankar R. PCA-SIFT: A more distinctive representation for local image description. Proc. of IEEE Computer Vision and Pattern Recognition Conference. 2004, 2. 506–513.5 赵向阳,杜立民.一种全自动稳健的图像拼接融合算法.中国图形图像学报,2004.9(4):417–422.6 Harris C, Stephen M. A combined Corner and edge detect. Proc. of 4th Alvey Vision conference. UK. 1988. 15–50.7 李寒,牛纪帧,郭禾.基于特征点的全自动无缝图像拼接方法.计算机工程与设计,2007,28(9):2083–2085.8 张恒.基于sift的图像拼接算法研究[学位论文].天津:河北工业大学,2012.9 郭晓冉,崔少辉.基于局部特征点配准的图像拼接算法.半导体光电,2014,35(1):89–94.10 王俊秀,孔令德.基于特征点匹配的全景图像拼接技术研究.软件工程师,2014,17(11):10–1311 Jeff B, Lowe DG. Shape indexing using approximate nearest-neighbor search in high-dimensional spaces. Conference on Compute Vision andPattern Recognition. 1997. 1000–1006.12 Hartley R, Zisserman A. Multiple View Geometry in Computer Vision. London: 2nd Cambridge University Press, 2004.13 宋宝森.全景图像拼接方法研究与实现[学位论文].哈尔滨:哈尔滨工程大学,2012.14 林诚凯,李惠,潘金贵.一种全景图生成的改进算法.计算机工程与应用,2004,40(35):69–71,159.。
arcgis正射影像处理流程
arcgis正射影像处理流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!正射影像是一种精确的遥感影像处理技术,可以实现地表特征的精准提取、分析和监测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MOSAIC 拼接设置点击鼠标右键,弹出右键对话框,点击nvidia控制面板
进入nvidia控制面板,点击设置MOSAIC模式,新建配置。
按照nvidia mosaic设置步骤,
一,选择布局,
显示器数量,布局,显示器方向,
二,选择显示器,这里要注意,选择的显示器分辨率一定要一样,如果有不一样的请到设置多个显示器选项里把显示器分辨率设置一致。
三,排列显示器,看一下显示器上出现的序号,然后将对应的显示器拖入想要的白框内,
排列好点击应用,此时会黑屏几秒,然后弹出是否应用当前设置,点击是,然后点击结束
此时拼接完成,得到我们需要的拼接分辨率。