演示文稿机构及机构运动简图
合集下载
第二章自由度及机构运动简图ppt课件
如多个行星轮。
编辑版pppt
33
6.两构件构成高副,两处接触,且法线重合。 如等宽凸轮
注意: 法线不重合时,变
成实际约束!
n2
n1
A n1
A’ n2
编辑版pppt
W
n1
n2
A
A’
n1
n2
34
注意:各种出现虚约束的场合都是有条件的 ! 虚约束的作用: ①改善构件的受力情况,如多个行星轮。
②增加机构的刚度,如轴与轴承、机床导轨。 ③使机构运动顺利,避免运动不确定,如车轮。
编辑版pppt
30
⑦已知:AB=CD= B EF, 且AB ∥ CD 1 ∥ EF,试计算图示
平行四边形 机构的 A
自由度。
2C D3 F
E 4
虚约束
解: 重新计算:n=3, PL=4, PH=0
F=3n - 2PL - PH =3×3 -2×4 =1 特别注意:此例存在虚约束的几何条件是:
AB 、CD、EF三杆平行且相等。
机动示意图——定性地表示机构的组成及运动原理 而不严格按比例绘制的机构运动简图。
编辑版pppt
13
常用机构运动简图符号
在 机 架 上 的 电 机
齿 轮 齿 条 传 动
圆
带
锥
传
齿
动
轮
传
动
编辑版pppt
14
链
圆柱
传
蜗杆
动
蜗轮
传动
外啮 合圆 柱齿 轮传 动
凸 轮 传 动
编辑版pppt
15
内啮
棘பைடு நூலகம்
合圆
轮
编辑版pppt
20
经运动副相联后,构件自由度的变化:
平面机构运动简图及自由计算PPT课件

第36页/共46页
课堂练习
计算下列图示机构自由度,并判断机构是否有确定的相对运动?
F A B E C D
第37页/共46页
计算下列图示机构自由度,并判断机构是否有确定的相对运动?
F
8
6
D
F
7A
6
1
B
52 E
5 3
C
4
E
2
B
4
C 3
1A
D
(1)
(2)
(1) n=8,PL=10,PH=0 F=3n-2PL-PH=3×8-2×10-0=1 W=F>0,机构具有确定的相对
二、机构运动简图
动画
➢1.机构运动简图
撇开实际机构中与运动无关的因素,用简单的线条和符号 表示构件和运动副,并按一定比例定出各运动副的位置,表示机 构各构件间相对运动关系的图。
➢2.机构示意图
只是定性地表示机构的组成及运动原理,而不用严格按比例 绘制的简图,通常称为机构示意图。
第14页/共46页
机构运动简图
F 8
A2
1
3
6
B
E
4
7D
C
5
动画
动画2
第15页/共46页
♥ 3.绘制机构运动简图的方法和步骤
1)找出各构件和选定视图平面
动画
一般选定的视图平面应与各构件平行,由原动件→从动件及 机架
2)找出联接构件的各运动副
由从原动构件出发沿运动的传递路线,分析各构件间的相对 运动性质;确定活动构件数目、运动副的类型和数目根据运动副 类别画上相应的符号,并逐个注上表示运动副的代号A、B、C、 D….,和构件的数目1、2、3、….
面内运动,则称为该机构为平面机构。(实例1、实例2)
课堂练习
计算下列图示机构自由度,并判断机构是否有确定的相对运动?
F A B E C D
第37页/共46页
计算下列图示机构自由度,并判断机构是否有确定的相对运动?
F
8
6
D
F
7A
6
1
B
52 E
5 3
C
4
E
2
B
4
C 3
1A
D
(1)
(2)
(1) n=8,PL=10,PH=0 F=3n-2PL-PH=3×8-2×10-0=1 W=F>0,机构具有确定的相对
二、机构运动简图
动画
➢1.机构运动简图
撇开实际机构中与运动无关的因素,用简单的线条和符号 表示构件和运动副,并按一定比例定出各运动副的位置,表示机 构各构件间相对运动关系的图。
➢2.机构示意图
只是定性地表示机构的组成及运动原理,而不用严格按比例 绘制的简图,通常称为机构示意图。
第14页/共46页
机构运动简图
F 8
A2
1
3
6
B
E
4
7D
C
5
动画
动画2
第15页/共46页
♥ 3.绘制机构运动简图的方法和步骤
1)找出各构件和选定视图平面
动画
一般选定的视图平面应与各构件平行,由原动件→从动件及 机架
2)找出联接构件的各运动副
由从原动构件出发沿运动的传递路线,分析各构件间的相对 运动性质;确定活动构件数目、运动副的类型和数目根据运动副 类别画上相应的符号,并逐个注上表示运动副的代号A、B、C、 D….,和构件的数目1、2、3、….
面内运动,则称为该机构为平面机构。(实例1、实例2)
机构运动简图
机构运动简图
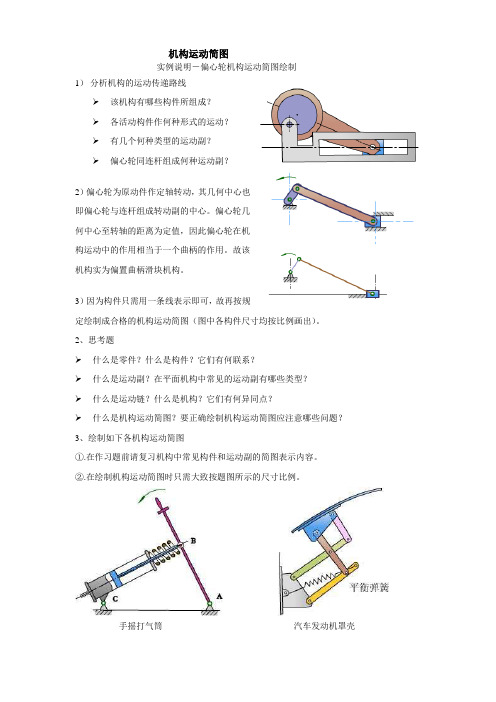
实例说明-偏心轮机构运动简图绘制
1)分析机构的运动传递路线
➢该机构有哪些构件所组成?
➢各活动构件作何种形式的运动?
➢有几个何种类型的运动副?
➢偏心轮同连杆组成何种运动副?
2)偏心轮为原动件作定轴转动,其几何中心也
即偏心轮与连杆组成转动副的中心。
偏心轮几
何中心至转轴的距离为定值,因此偏心轮在机
构运动中的作用相当于一个曲柄的作用。
故该
机构实为偏置曲柄滑块机构。
3)因为构件只需用一条线表示即可,故再按规
定绘制成合格的机构运动简图(图中各构件尺寸均按比例画出)。
2、思考题
➢什么是零件?什么是构件?它们有何联系?
➢什么是运动副?在平面机构中常见的运动副有哪些类型?
➢什么是运动链?什么是机构?它们有何异同点?
➢什么是机构运动简图?要正确绘制机构运动简图应注意哪些问题?
3、绘制如下各机构运动简图
①.在作习题前请复习机构中常见构件和运动副的简图表示内容。
②.在绘制机构运动简图时只需大致按题图所示的尺寸比例。
手摇打气筒汽车发动机罩壳
泵手动冲孔机
颚式破碎机偏心轮传动机构4、习题答案
手摇打气筒(弹簧不为构件)颚式破碎机
泵手动冲孔机汽车发动机罩壳偏心轮传动机构
机构运动简图校内课程校外实训
一、绘制如下各机构运动简图(在绘制机构运动简图时只需大致按题图所示的尺寸比例)
手摇打气筒汽车发动机罩壳
泵手动冲孔机
颚式破碎机偏心轮传动机构班级:姓名:学号:。
100套机构运动简图

机构运动简图的用途:能反映各个构件之间的连接关系、运动关系。
Hale Waihona Puke 用规定的简单线条和符号代表构件和运动副按比例尺定出运动副的位置准确表达机构运动特征的简单图形
100套 机 构 运 动 简 图
机构运动简图:用规定的简单线条和符号代表构件和运动副,按比例尺定出运动副的位置,准 确表达机构运动特征的简单图形。机构运动简图一定要按比例尺绘制,否则只能称之为机构示 意图。机构运动简图比例尺是实物尺寸(m)比上图纸尺寸(mm),单位是m/mm,机械制图 比例尺是图纸尺寸(mm)比上实物尺寸(mm),无单位。
Hale Waihona Puke 用规定的简单线条和符号代表构件和运动副按比例尺定出运动副的位置准确表达机构运动特征的简单图形
100套 机 构 运 动 简 图
机构运动简图:用规定的简单线条和符号代表构件和运动副,按比例尺定出运动副的位置,准 确表达机构运动特征的简单图形。机构运动简图一定要按比例尺绘制,否则只能称之为机构示 意图。机构运动简图比例尺是实物尺寸(m)比上图纸尺寸(mm),单位是m/mm,机械制图 比例尺是图纸尺寸(mm)比上实物尺寸(mm),无单位。
平面机构的运动简图绘制34页PPT

例7
F = 3n - 2Pl - Ph F’ 9 12 1 ==31 -2 - -1
2-7虚约束对机构工作性能的影响
• 虚约束虽不影响机构运动,但能起到 改善机构受力状况,使动力平衡,增 加机构刚度和稳定性,克服机构的运 动不确定性等作用 。
•不论哪种虚约束,都对几何尺寸提出严 格的要求,否则虚约束将变成实际约束。
F=3n-2Pl-Ph =3 -2 2 -3 1
2
=-1 错
1
➢移动副导路平行 ➢转动副轴线重合 ➢平面高副接触点共法线
“移动副”
“转动副”
注意事项(续)
局部自由度F’ —除去
机构中某些构件所具 有的局部运动,并不影响 机构运动的自由度。
这时
F = 3n - 2Pl - Ph 3 3 1
==32 -2 -
——Ⅱ级机构 最高级别为Ⅲ级组的基本杆组所构成的机构
——Ⅲ级机构
3. 平面机构的结构分析 判断机构由哪些基本杆组组成 确定机构的级别
II级机构
1 8
5
4 6
3
7
2
8 5 6 7
4
2
3
III级机构
小结
1 机器和机构的概念 机器——机构——构件——零件
机构中的构件可分为固定件、原动件 、从动件
2 运动副的三要素
2-4 机构具有确定运动的条件 2-6 计算平面机构自由度时应注意
的事项 2-7 虚约束对机构工作性能的影响 2-8 平面机构的组成原理、结构分类
及结构分析
学习提示:
重点是: 1 计算机构自由度时的注意事项 2 机构具有确定运动的条件
难点是: 虚约束的识别与处理
2-6 计算平面机构自由度时应 注意的事项