考虑铁芯磁饱和的开关磁阻电机电感及转矩解析建模
开关磁阻电机等效磁网络模型的建立与仿真
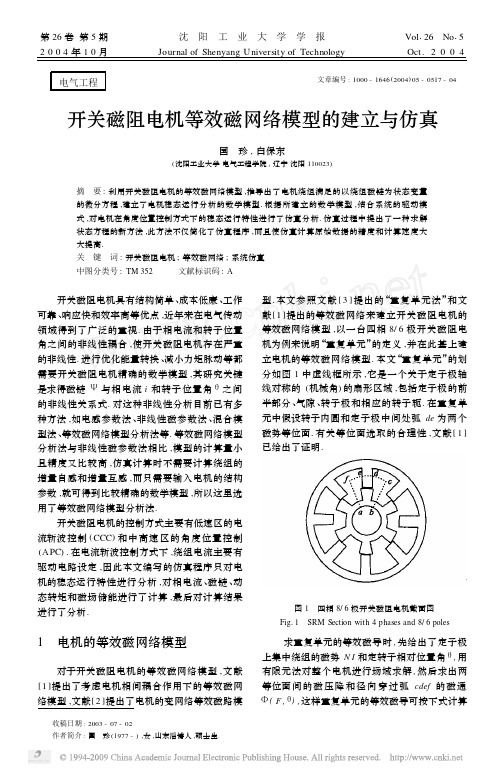
收稿日期:2003-07-02作者简介:国 珍(1977-),女,山东淄博人,硕士生.电气工程文章编号:1000-1646(2004)05-0517-04开关磁阻电机等效磁网络模型的建立与仿真国 珍,白保东(沈阳工业大学电气工程学院,辽宁沈阳110023)摘 要:利用开关磁阻电机的等效磁网络模型,推导出了电机绕组满足的以绕组磁链为状态变量的微分方程,建立了电机稳态运行分析的数学模型.根据所建立的数学模型,结合系统的驱动模式,对电机在角度位置控制方式下的稳态运行特性进行了仿真分析.仿真过程中提出了一种求解状态方程的新方法,此方法不仅简化了仿真程序,而且使仿真计算原始数据的精度和计算速度大大提高.关 键 词:开关磁阻电机;等效磁网络;系统仿真中图分类号:TM 352 文献标识码:A 开关磁阻电机具有结构简单、成本低廉、工作可靠、响应快和效率高等优点,近年来在电气传动领域得到了广泛的重视.由于相电流和转子位置角之间的非线性耦合,使开关磁阻电机存在严重的非线性.进行优化能量转换、减小力矩脉动等都,其研究关键是求得磁链Ψ与相电流i 和转子位置角θ之间的非线性关系式.对这种非线性分析目前已有多种方法,如电感参数法、非线性磁参数法、混合模型法、等效磁网络模型分析法等.等效磁网络模型分析法与非线性磁参数法相比,模型的计算量小且精度又比较高,仿真计算时不需要计算绕组的增量自感和增量互感,而只需要输入电机的结构参数,就可得到比较精确的数学模型,所以这里选用了等效磁网络模型分析法.开关磁阻电机的控制方式主要有低速区的电流斩波控制(CCC )和中高速区的角度位置控制(APC ).在电流斩波控制方式下,绕组电流主要有驱动电路设定,因此本文编写的仿真程序只对电机的稳态运行特性进行分析,对相电流、磁链、动态转矩和磁场储能进行了计算,最后对计算结果进行了分析.1 电机的等效磁网络模型对于开关磁阻电机的等效磁网络模型,文献[1]提出了考虑电机相间耦合作用下的等效磁网络模型,文献[2]提出了电机的变网络等效磁路模型.本文参照文献[3]提出的“重复单元法”和文献[1]提出的等效磁网络来建立开关磁阻电机的等效磁网络模型,以一台四相8/6极开关磁阻电机为例来说明“重复单元”的定义,并在此基上建立电机的等效磁网络模型.本文“重复单元”的划分如图1中虚线框所示,它是一个关于定子极轴线对称的(机械角)的扇形区域,包括定子极的前半部分、气隙、转子极和相应的转子轭.在重复单元中假设转子内圆和定子极中间处弧de 为两个磁势等位面.有关等位面选取的合理性,文献[1]已给出了证明.图1 四相8/6极开关磁阻电机截面图Fig.1 SRM Section with 4phases and 8/6poles 求重复单元的等效磁导时,先给出了定子极上集中绕组的磁势N I 和定转子相对位置角θ,用有限元法对整个电机进行场域求解,然后求出两等位面间的磁压降和径向穿过弧cdef 的磁通Φ(F ,θ),这样重复单元的等效磁导可按下式计算第26卷第5期2004年10月沈 阳 工 业 大 学 学 报Journal of Shenyang University of TechnologyVol 126No 15Oct.2004G =Φ-(F ,θ)/F 假设电机绕组采用反向串联方式,这样根据电机结构的对称性只需分析半个电机的情况,图2就是对应于电机的等效磁网络模型.电机绕组采用正向串联方式时,可按同样思路分析.图2中参数的含义和计算方法如下:G 1~G 4为重复单元的等效磁导,其计算方法已在前面进行了讨论.图2 开关磁阻电机的等效磁网络模型图Fig.2 Equivalent magnetic circuit for SRM G 5~G 8为定子极根后半部分的等效磁导G i =μFe B p L s /B 0 (i =5,6,7,8)μFe 为定子轭部分铁心的磁导率;B p ,H p 分别为定子极的极宽和极高;L s 为定子铁心长度;S sl 为相邻极间等效漏磁导G sl =015μ0H J L s /B 0μ0为空气的磁导率;B 0为定子大槽的平均宽度.G 9~G 12为每段定子磁轭的等效磁导G i =μFe A c /L c (i =9,10,11,12)A c 为定子轭的等效截面积;L c 为每段定子轭的长度.F 1~F 4为定子极上集中绕组产生的磁势,F k =N I k (k =1,2,3,4);N 为集中绕组的匝数;I k 为第k 相的相电流.2 电机绕组满足的状态方程根据网络图中节点的编号,列出图2等效磁网络的节点方程如下AU =B F(1)式中 U 为节点磁势列向量;F 为绕组集中磁势列向量,A ,B 为系数矩阵.根据图2的等效磁网络图,分析穿过定子极的磁链还可以得到一组等式,即穿过第i 个定子极绕组中的磁链可表示为Ψi =N (U i -F i /2)G i (i =1,2,3,4)(2)写成矩阵形式Ψ=DU +EF (3)式中 D 、E 分别为参数矩阵,列向量U 、F 定义上面已给出.对于电机的各相绕组,它们满足方程v k =ri k +d Ψk d t =rN F k +d Ψk d t(4)式中 r 为绕组电阻;i k ,v k 分别为第i 相绕组的相电流和外加电压,Ψi 为第i 相绕组的磁链.将式(4)写成矩阵形式V =r N F +d Ψd t(5) 由式(1),(3),(5),消去列向量U ,F ,可以得到一个以磁链列向量Ψ为状态变量的状态方程d Ψd t =-rN(DA -1B +E )-1Ψ+V (6)利用方程(6)求出各相绕组的磁链以及磁链的变化率之后就可以计算绕组的相电流i k =1r v k -d Ψk d t (k =1,2,3,4)(7)令A 1=A -1B ,A 2=DA -1B , A 3=DA -1B +E ,基于本文样机结构参数,定子极数8,转子极数6,定子外径130mm ,定子轭内112mm ,定子内径70mm ,气隙014mm ,定子铁心长110mm ,所得矩阵值为A 1= 81881504×10-3 9103184×10-3 1158901×10-2-41521927×10-3 71928579×10-3 41411436×10-2-31099288×10-3-51835667×10-3-51274107×10-3-41423302×10-3 41415813×10-3 71866403×10-3A 2=-31484179×10-9 11773934×10-9 81265619×1012 11773934×10-9-31622158×10-9-21787549×10-12 81265534×10-9-21787548×10-9-11124036×10-8A 3= 31888119×10-7 11773934×10-9 81265619×1012 11773934×10-9 31974208×10-7-21787549×10-9 81265534×1012-21787548×10-9 61961374×10-9电机稳态运行时,系统磁场储能增量,电源输入电能及输出的机械能之间满足的关系式d We =d W m +d W mec(8)在d t 时间内电源输入的净电能为d We =∑4k =1(vk -i k 2r )d t(9)815 沈 阳 工 业 大 学 学 报第26卷电机在稳态运行的转子转速被认为是恒值,在d t时间内电机输出的机械能为d W mec=(T+T′)ωd t(10)式中 T为电机的瞬时转矩;T′为摩擦损耗和其他杂散损耗对应的转矩;ω为转子的机械角速度.综合式(8)~(10),可以得到瞬时转矩的计算公式T=1ω∑4k=1(v k i k-i k2r)-d W mωd t-T=1ω∑4k=1(v k i k-i k2r)-d W mdθ-T′(11)离散的磁场能表示成傅立叶级数W m=α2+∑∞n=1a n cosnπθl+b n sinnπθl(12)a n=1n∫l-lW m(θ)cosnπθldθ(n=0,1,2…)b n=1n∫l-lW m(θ)sinnπθldθ(n=1,2,…)上式中(-l,l)为磁场储能的变化周期,这样有d W mdθ=∑∞n=1-a nnπlsinnπθl+b nnπlcosnπθl(13)可以根据要求的计算精度确定上式求和项的项数,一般取前4项就可以了.3 系统仿真的实现在电流斩波控制方式下,绕组电流主要由驱动电路设定,因此本文编写的仿真程序只对电机的稳态运行特性进行了分析.仿真程序中只需输入电机的结构尺寸,转速,外加电压,开通角,关断角等参数就可求出状态方程的系数矩阵,然后应用MA TLAB中龙格库塔法函数ode45求解状态方程,求得磁链和电流.本文编写的仿真程序与文献[3]不同的是引用了MA TLAB中的函数求解,简化了程序,使程序易于编写与调试,原始数据的计算精度和计算速度都得到了提高.本文样机控制参数为:绕组开通角0°,关断角18°,转速为1000r/min,绕组电阻015Ω,主功放桥臂电压80V.基于以上参数,所得仿真图形如图3所示.图3 系统的仿真波形Fig.3 Simulation results of the system 以上图形是在本文建立的数学模型下得到的,从仿真结果来看,电机在稳态运行时产生负转矩,这主要是由于相电感处于下降段所致,要减小负转矩,可采取减小关断角,使关断位置提前的方法,但关断角太小又会使导通角缩短,对电机运行不利,在实际中,应适当选择开通角和关断角,以保证电机获得最佳运行性能和最大功率.4 结 论本文利用开关磁阻电机的等效磁网络模型,推导出了电机绕组满足的以绕组磁链为状态变量的微分方程,建立了电机稳态运行分析的数学模型.根据所建立的数学模型,对电机在角度位置控915第5期国 珍等:开关磁阻电机等效磁网络模型的建立与仿真 制方式下的稳态运行特性进行了仿真分析,这是对开关磁阻电机理论分析的新探索,新发展,通过预先在计算机中进行SRM仿真分析,可以优化设计,提高性能,对实际工作有着重要的意义.参考文献:[1]童怀.磁阻电机动态特性的非线性分析与计算机仿真[M].北京:科学出版社,2000.(Tong puter simulation and nonlinear analysis for dinamic characteristics of SRM[M].Beijing:Science Press,2000.)[2]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1999.(Wang H H.Speed adjustment technique for SRM[M].Beijing:China Machine Press,1999.)[3]詹琼华.开关磁阻电动机[M].武汉:华中理工大学出社,1992.(Zhan Q H.Switched reluctance motor[M].Wuhan: Huazhong University of Technology Press,1992.) [4]贺益康.交流电机的计算机仿真[M].北京:科学出版社,1990.(He Y puter simulation for AC machines[M].Beijing:Science Press,1990.)[5]Russa K.Torque2ripple minimization in switched reluc2tance machines over a wide speed range[J].IEEE Transactions on Industry Applications.1998,34(5): 1105-1112.[6]Cheok D.A new torque and flux control method forswitched reluctance motor drives[J].IEEE Transactions on Power Electronics,2002,17(4):543-557.Equivalent magnetic circuit model of switched reluctancemotor and system SimulationGUO Zhen,BAI Bao2dong(School of Electrical Engineering,Shenyang University of Technology,Shenyang110023,China)Abstract:A steady state analysis model of the switched reluctance motor was presented in this paper,with the state equations established by taking the flux linkages of the phase windings as state variable,based on the use of the magnetic equivalent circuit of the motor.The steady state characteristics of the switched re2 luctance motor is simulated for the angle2place2control model.The new solution of the switched reluctance motor is proposed in this paper.The new method is more concise and more precise.K ey w ords:switched reluctance motor;equivalent magentic circuit;system simulation 025 沈 阳 工 业 大 学 学 报第26卷。
ANSYS-Maxwell-2D求解齿槽转矩、饱和电感、饱和磁链的几种方法
齿槽转矩、一、问题描述1.齿槽转矩T cog :当永产生的转矩即为T cog ,它是是永磁电机特有的问题之关键问题。
2.饱和电感:绕组存在导致绕组电感变化。
考虑高电机模型精度有重要意3.饱和磁链:绕组交链存在饱和现象。
二、基于Maxwell 2d 的求Maxwell 2D 可以有效对于求Tcog,方法很多为模板,介绍3种方法。
打开该案例后,首先Settings 中设置“Fract 算例,将新算例的类型修例,删除RMxprt 算例,按1.静磁场扫描转子旋转角首先,选中转子轭和4在弹出窗口中将旋转角度弹出的窗口中,定义变量磁链等随电流变化的规律ANSYS Maxwell 求解、饱和电感、饱和磁链永磁电机绕组不通电时,永磁体和定子是永磁体与电枢齿之间相互作用力的之一,是高性能永磁电机设计和制造中在电感,当电机负载不同时,铁心的虑不同负载电流、不同转子角度下的绕意义。
链有磁链,跟电感一样,磁链也受电流求解T cog 的方法仿真得出永磁电机电磁方案的齿槽转多。
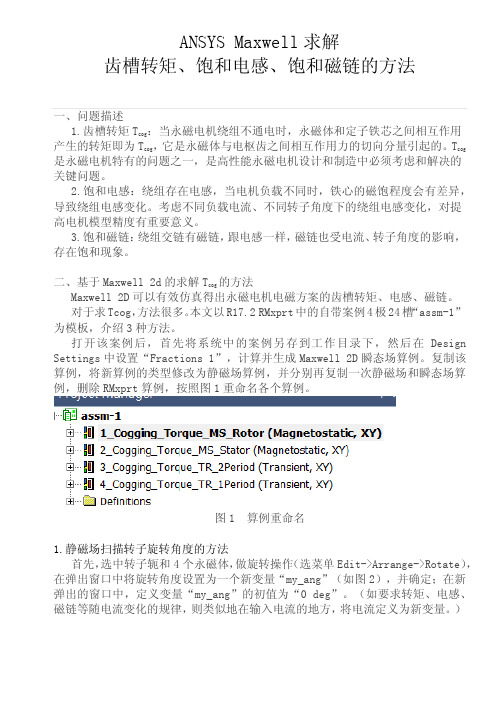
本文以R17.2 RMxprt 中的自带案例先将系统中的案例另存到工作目录ions 1”,计算并生成Maxwell 2D 修改为静磁场算例,并分别再复制一按照图1重命名各个算例。
图1 算例重命名角度的方法个永磁体,做旋转操作(选菜单Edit 度设置为一个新变量“my_ang”(如图量“my_ang”的初值为“0 deg”。
律,则类似地在输入电流的地方,将电链的方法子铁芯之间相互作用的切向分量引起的。
T cog 中必须考虑和解决的的磁饱程度会有差异,绕组电感变化,对提流、转子角度的影响,转矩、电感、磁链。
例4极24槽“assm-1”录下,然后在Design 瞬态场算例。
复制该一次静磁场和瞬态场算t->Arrange->Rotate),图2),并确定;在新(如要求转矩、电感、电流定义为新变量。
)图2 旋转转子然后,选中模型中的“Band”区域,选菜单“Maxwell2D->Parameters->Assign-> Torque” 中,定义求解转矩(如要求电感或磁链,则选“…->Matrix…”,另外在此前还要先定义有电流的区域“Excitations->Assign Current”),如图3所示。
E型铁心开关磁通电机的电磁性能解析计算

E型铁心开关磁通电机的电磁性能解析计算杨玉波;王宁;王秀和【摘要】Because of the complexity of magnetic field, it is difficult to calculate the magnetic field of flux switching permanent magnet( FSPM) motor by analytical method. The analytical model of E-core FSPM motor was advised with the subdomain method. The whole domain was divided into several subdomains based on the electronic and magnetic properties, and the partial differential equations were built in all subdomains. With the general solution and boundary condition, the magnetic vector potential was ob-tained. Then the flux density, coil flux and coil EMF were calculated. At last, the calculated results are verified with finite element method( FEM) . Although the saturation can not be considered in the analyti-cal model, itis very useful in the initial design and optimization design of FSPM motor because of the short computation time.%由于复杂磁路的影响,开关磁通电机电磁性能的解析计算是个难点。
(完整版)三相6_4极开关磁阻电机转矩特性分_析与优化设计毕业设计
密级:内部三相6/4极开关磁阻电机转矩特性分析与优化设计Analysis and Optimal Design of Torque Characteristics of Three-phase 6/4 Pole SwitchReluctance Motor学院:电气工程学院专业班级:电气工程及其自动化1003班姓名:陈运楷指导教师:张殿海(讲师)2014年6月摘要近年来随着电力电子技术和控制技术的发展,诞生了一种新的特种电机—开关磁阻电机。
该电机具有结构简单、调速性能优良、成本低廉、可靠性高、起动转矩大、效率高等优点。
因此,被广泛应用于牵引传动、通用工业、家用电器等众多领域。
然而,由于开关磁阻电机的双凸极结构所引起的磁路非线性和饱和效应以及特殊的供电方式,与传统的电机相比存在着振动和噪声大的缺点,这就大大限制了开关磁阻电机向更多应用领域的拓展。
因此为了得到更好的开关磁阻电机的动静态性能,如何降低转矩脉动和抑制噪声已经成为今后开关磁阻电机控制系统的研究重点。
首先根据开关磁阻电机的运行机理,以三相6/4极开关磁阻电机作为分析模型,利用ANSOFT软件中的Maxwell模块完成电机的建模和分析。
其次通过修改开关磁阻电机转子极弧系数以及在转子表面开口的方法,改善电机的输出转矩特性。
结合MATLAB软件分析修改转子对平均转矩和转矩脉动的影响。
最后利用实验室自行开发的多目标优化软件对平均转矩和转矩脉动进行多次优化,经过比较后找到最佳解,得到平均转矩提高、转矩脉动下降的结果,达到优化设计的最终目的。
关键词:开关磁阻电机;转矩脉动;平均转矩;优化设计AbstractIn recent years, with the development of power electronic technology and control technology, a new motor called switch reluctance motor, which has so many advantages such as simple structure, excellent performance of speed adjustment, low cost, high reliability, and large starting torque, high efficiency was developed. Therefore, it was applied in many fields such as traction drive, general industrial, and household appliances etc.However, due to the double salient structure of switch reluctance motor which caused nonlinearity of the magnetic circuit and saturation effect as well as the special power supply pattern, compared with the traditional motor the vibration and noise is significant. This feature greatly limited the application of switch reluctance motor to more fields. Therefore, in order to achieve the better dynamic and static performance for the switch reluctance motor, how to reduce the torque ripple and noise has become the hot spot of the future research of switch reluctance motor and its control system.Firstly, according to the operating mechanism of the switch reluctance motor, a three-phase 6/4 pole switch reluctance motor is taken as the analysis model, the torque characteristics is analyzed by utilizing the ANSOFT Maxwell module.Secondly, in the optimization model, the rotor pole arc coefficient and sub-slot on the surface of rotor are taken as the design variables, the torqueripple and average torque are taken as two objective functions. The MATLAB software is applied to calculate the average torque and torque ripple from the Maxwell results.Finally, a multi-objective optimization algorithm which was developed by the laboratory is applied to find out the optimal solution. In order to determine the global optimal solution, the optimization procedure was carried out twice. From the results, the average torque and torque ripple characteristic were improved.Keywords:Switch reluctance motor; torque ripple; average torque; optimal design目录摘要 (I)A bstract........................................................................................................................ I I 第1章绪论 (1)1.1课题背景及意义 (1)1.2课题国内外研究现状及趋势 (3)1.2.1国内发展趋势 (3)1.2.2国外发展趋势 (4)1.3课题主要研究内容 (5)1.4本章小结 (6)第2章开关磁阻电机特点与设计方法 (7)2.1三相6/4极开关磁阻电机的结构与原理分析 (8)2.1.1三相6/4极开关磁阻电机的结构 (8)2.1.2三相6/4极开关磁阻电机的运行原理 (9)2.2开关磁阻电机分析与设计方法 (11)2.2.1 基于Ansoft 的开关磁阻电机有限元分析介绍 (11)2.2.2 转矩脉动、噪声和振动产生的根源 (13)2.2.3 采用的设计方法 (13)2.3本章小结 (14)第3章开关磁阻电机建模 (15)3.1创建电机几何模型 (15)3.1.1创建项目 (15)3.1.2建模过程 (16)3.2材料定义及分配 (21)3.3激励源与边界条件定义及加载 (23)3.4运动选项设置 (27)3.5求解选项参数设定 (28)3.6磁力线与磁密云图 (31)3.7外电路与有限元连接 (33)3.8本章小结 (34)第4章开关磁阻电机优化设计 (35)4.1优化与设计 (35)4.1.1多目标优化简介 (35)4.1.2响应表面的应用 (36)4.2修改转子极弧系数及结构 (37)4.3求解转矩 (38)4.4利用MATLAB求解平均转矩和转矩脉动 (41)4.5优化过程 (44)4.5.1一次优化 (45)4.5.2 二次优化 (46)4.6本章小结 (50)第5章结论 (51)参考文献 (53)致谢 (56)第1章绪论1.1课题背景及意义开关磁阻电机(Switch Reluctance Motor简称SR电机)具有结构简单、转子无绕组、无永磁体、可靠性高等特点,且有控制方式灵活、调速性能好等许多优点。
考虑磁场饱和效应的凸极同步电动机建模
严 重影响 高性 能电动机驱 动 系统的控 制精确度 , 凸极 同步 电动机 磁 场饱 和模 型进 行 了研 究 。 阐 对
述 了电动机 dq轴 交叉饱和 的机理 , 用稳 态饱 和 电感 , 态饱和 电感 以及 交叉饱和 电感来表 述磁 - 采 动 场非 线性 的特 征 , 建立 了凸极 同步 电动机 非线性磁 场饱 和模 型 , 同时给 出了其 状 态空间 方程 。采 用 矢量控 制策略 对 凸极 同步 电动机 的磁 场饱 和模 型进行 仿 真分 析 , 果表 明 电动机 的励磁 电流 能根 结
景 巍 , 谭 国俊 , 叶宗彬
(. 1 中国 矿 业 大 学 信 息 与 电气 工 程 学 院 , 苏 徐 州 2 10 ; 江 2 0 8
2 江苏省电力传动 与 自动控制工程技术研究 中心 ,江苏 徐州 2 1 1 ) . 2 16
摘
要 : 对 常规线性磁 场模 型难 以准确 描 述 凸极 同步 电动机 的稳 态和 动 态特性 , 场 饱和 效 应 针 磁
A s atTa io a l er an t i ut o e o l n—o yc rn u o r S b t c :rd i li a gei c cim dl f a et l sn ho o s t ( M)cnh rl d ・ r t n n m c r si p e m o a a y e d
2 J n s n ie r gR sac e t r l t cl r ea d C n o , u h u2 1 , hn ) . i gu E gn e n ee rhC ne f e r a D v n o t l X z o 2 6 C ia a i r o E ci i r 1 1
M o l g o a i n - o e s n hr n u o o o sd g dei fs l tp l y c o o s m t r c n i e m n e r str t ne et a u a i f c o JN t , T N G ojn , Y o gbn , I G We A u- u E Z n .i
基于忆阻器的开关磁阻电机建模方法
基于忆阻器的开关磁阻电机建模方法梁燕1陈昊2于东升3(1.2.3 中国矿业大学江苏徐州221008 信息与电气工程学院)摘要三端忆阻器是在两端忆阻器数学模型的基础上提出的,是一种阻值可控的可以记忆的非线性器件。
本文依据开关磁阻(简称SR)电机相绕组的电磁特性,以理想线性电感模型为设计基础,建立了基于忆阻器且具有SR电机电感特性的电路模型。
首先把转子位置信号和电感端电压分别看作三端忆阻器的输入变量,使忆阻器的阻值跟随转子位置变化而变化。
根据需要建立了忆阻器向忆感器转换模型,并搭建了SR电机绕组的忆感器模型。
PSPICE仿真结果表明,所建模型等效电感值随输入转子位置信号的变化趋势与SR电机绕组线性模型电感曲线相同。
关键词:三端忆阻器忆感器开关磁阻电机线性电感模型0 引言早在1971年,蔡少棠教授根据科学的对称性原理,预言存在第四个基本电路元件—忆阻器[1-2],但是由于没有物理实现的元器件,忆阻器的研究没有引起足够的重视。
直到2008年5月,美国惠普实验室提出了忆阻器的物理模型,证实了它的存在[3]。
忆阻器是一种无源二端元件,有着独特的记忆功能,可以通过控制其两端的电压或是流过的电流来改变其阻值。
这种记忆信息的能力使其在非易失性存储器、人工神经网络、图像处理上具有较大的应用潜力,并且可能导致一种新型计算机存储器的产生[4]。
把忆阻器的概念扩展得到了忆感器、忆容器,它们同样具有记忆的功能[5],将会得到更广泛的应用。
SR电机具有结构简单坚固、制作成本低、可靠性强、效率高等特点。
为了对SR电机进行理论分析,需要建立数学模型,其关键之处是能够反映SR 电机的电感(或磁链模型)。
目前已有多种SR电机电感模型建模方法如线性法、准线性法、函数解析法以及有限元分析法等。
但是还没有文献提出忆感器在SR电机建模上的应用,本文为了简化模型的构建,采用了SR电机电感线性模型。
根据已提出的三端忆阻器方程建立了其电路模型,并将SR 电机线性电感模型与其组合,建立了SR电机相绕组的忆阻器模型。
开关磁阻电机的基本了解
开关磁阻电机的基本学习内容1 开关磁阻电机的基本原理以及结构开关磁阻电动机(Switched Reluctance Motor ,简称SRM) 定转子为双凸极结构,铁心均由普通硅钢片叠压而成,其定子极上有集中绕组,径向相对的两个绕组串联构成一相,转子非永磁体,其上也无绕组[1,3]。
SRM 的定转子极数必须满足如下约束关系:s r s N =2kmN = N + 2k (1-1) 其中,Ns ,Nr 分别为电机定、转子数;m 为电机相数值减1;k 为一常数。
以下图1-1所示一个典型四相8/6极SRM 为例,相数为4,因而m=3,取k=1,则Ns=6,Nr=8。
m 及k 值越高,越利于高控制性能控制,但相应成本越高,结构越复杂。
目前技术较为成熟,发展较为迅速的产品多为三、四相SRM [2]。
图1-1即为一典型四相8/6结构的SRM电机本体及其不对称功率变换器主电路的示意图(图1-1在末尾手画)。
为表述清晰,图中仅画出不对称半桥电路的一相,其他各相均与该相相同,并省略了相应的驱动及检测电路。
完整的开关磁阻电机调速系统(Switched Reluctance Motor Drive,简称SRD)则由SRM、功率变换器、控制器、位置检测器等四大部分组成,如下图1-2示。
SRM可以认为是同步电机的一个分支,它运行时遵循磁阻最小原理,同步进电机较为类似[2,30]。
其具体运行原理如下:首先要保证励磁相的定子凸极和最近的转子凹极中心线不重合,也即初始位移不能位于磁阻最小位置。
通以交流电后,经过一个整流桥变为直流电源,当开关S1和S2开通时,AA’相通电励磁,产生一个磁拉力。
在该电磁力的轴向分量作用下,产生电磁转矩,凸极转子铁心趋向于旋转到定转子极轴线B-B’与A-A’重合的位置;而电磁力的径向力分量则造成定子的“变形”,这也是产生转矩脉动和电机噪声的根本原因之一。
在该过程中电机吸收电能。
关断S1和S2,开通BB’相,此时AA’相经续流二极管VD1、VD2将电能回馈给电源,同时BB’相趋向运行到定转子极轴线C-C’与B-B’重合的位置。
开关磁阻电机毕业设计
performance ;modeling and simulation; MATLAB ;Control strategy
II
目录
摘 要...................................................................................................................................................... I ABSTRACT......................................................................................................................................... II 目录 ..................................................................................................................................................... III 1 绪 论 ................................................................................................................................................. 1 1.1 开关磁阻电机的研究历史和发展方向................................................................................... 1 1.2 本课题的主要任务 .................................................................................................................... 3 2 开关磁阻电机调速系统...................................................................................................................4 2.1 开关磁阻电机的基本组成环节 ...............................................................................................4 2.1.1 功率主开关器件 ..................................................................................................................5 2.1.2 功率变换拓补电路 ..............................................................................................................5 2.1.3 控制器.................................................................................................................................. 7 2.1.4 位置检测 .............................................................................................................................. 7 2.1.5 电流检测 .............................................................................................................................. 8 2.2SRD 开关磁阻特点及应用........................................................................................................ 9 2.3 开关磁阻电机的原理.............................................................................................................. 10 3 SR 电动机的基本原理及数学模型.............................................................................................. 12 3.1 概述 ........................................................................................................................................... 12 3.2 开关磁阻电机的数学模型 ......................................................................................................12 3.3 SR 电动机的基本方程式........................................................................................................ 13 3.3.1 电路方程 ............................................................................................................................ 13 3.3.2 机械方程........................................................................................................................... 14 3.3.3 机电联系方程.................................................................................................................... 14 3.4.SR 电动机简化线性模型........................................................................................................ 15 3.5 SR 理想线性模型的 SR 电动机绕组磁链波形....................................................................16 3.6 基于线性模型的 SR 电动机绕组电流解析分析..................................................................17 4 开关磁阻电机的控制策略 .............................................................................................................21 4.1.1 角位置控制 ........................................................................................................................ 21 4.1.2 电流斩波控制.................................................................................................................... 22 4.1.3 电压斩波控制.................................................................................................................... 24 5 开关磁阻电机仿真研究.................................................................................................................25 5.1 仿真软件 MATLAB/SIMULINK 简介......................................................................................25 5.2 仿真模型................................................................................................................................... 27 5.3 仿真结果与分析.......................................................................................................................31 6 结论 .................................................................................................................................................. 36
《开关磁阻电机》课件
电动汽车的驱动系统需要能够提供更高的扭矩和功率,同时还要具备较 高的可靠性和效率。开关磁阻电机能够满足这些要求,因此在一些高端 电动汽车中得到了应用。
在工业领域的应用
工业领域是开关磁阻电机的重要应用领 域之一,特别是在需要高扭矩、高可靠
性、高效率和高寿命的场合。
发展
开关磁阻电机在发展过程中不断改进和优化,以提高效率、降低成本、减小体积和重量等方面取得显著进展。目 前,开关磁阻电机已经在工业自动化、电动车、家用电器等领域得到广泛应用。
特点与优势
特点
开关磁阻电机具有结构简单、成本低、可靠性高、效率高、调速范围宽等优点。
开关磁阻电机具有更高的能效和可靠性,适 用于需要频繁启动、制动和调速的场合。此外,开关磁阻电机的控制系统简单, 维护方便,适用于各种恶劣环境。
开关磁阻电机的设计、制造和控制系 统已经得到了很大的发展,但仍存在 一些挑战和问题需要进一步研究和解 决。
对未来研究的展望
随着技术的不断进步和应用需求的不断提高,开关磁阻电 机的性能和功能需要进一步优化和完善。
未来的研究将更加注重开关磁阻电机的智能化、高效化、 小型化和轻量化等方面的研究,以适应更加复杂和多变的 应用场景。
在工业领域中,开关磁阻电机主要用于 驱动各种机械设备,如压缩机、泵、风 机、传送带等。由于其高效、可靠、维 护成本低等优点,开关磁阻电机在工业
领域中得到了广泛应用。
在工业自动化和智能制造领域,开关磁 阻电机的高效性和可靠性也得到了广泛 应用,如机器人关节驱动、自动化生产
线等。
在家用电器领域的应用
家用电器是开关磁阻电机的重要应用领域之一,特别是在需要高效、低噪音、低 维护成本的家电产品中。
饱和效应下的三相感应电动机精确建模
饱和效应下的三相感应电动机精确建模在考虑饱和效应的基础上建立了一种三相感应电动机模型。
该模型基于一个气隙通量与磁性调和函数的旋转参照系,通过实验描述非线性行为。
该模型也考虑到了磁场空间三次谐波磁通分布,其中电机自主磁通的饱和度模型经实验验证收到了良好的效果。
标签:三相感应电动机精确模型;气隙磁通;调和函数;三次谐波0 引言磁饱和影响气隙磁通主磁通路径主要有两个方面。
其一,最大空间磁通分布已不再涉及到線性磁化电流,此即为饱和的空间磁场的基本组成部分。
其二为磁饱和度失真,在空间磁通分布上,已经偏离了正弦波形。
而失真主要是由于出现三次谐波成分在空间通量密度分布。
因此本文提出了一种以dq轴为基本框架的三相感应电动机模型。
实验和模拟结果以三角形连接的三相感应电动机为例,验证了本文所提出的模型。
1 试验分析1.1 在气隙通量空间的饱和部分首先考虑饱和磁通的空间基础组成部分:气隙磁通分布。
同时需要将空间三次谐波气隙磁通分布列入考量范畴。
所提出的模型采用了固连于气隙磁通的旋转参考系,以d轴作为该旋转坐标系与磁通量的相对角速度。
图1为三相感应电动机基本模型。
其基本方程为:式中,为定子电压,为定子电阻等效压降,为定子电感,为旋转磁动势的速度,为等效励磁电压,为转定子电阻等效压降,为转子旋转速度,为定转子等效耦合电压。
为定子电流d轴分量,为转子电流d轴分量,为等效励磁电阻,为等效励磁电流,为微分算子。
1.2 考虑空间三次谐波磁通分布的影响当电机进入更深的磁饱和度,空间分布气隙通量没有较长的正弦,没有平坦的流量分配,而是由外部的第三空间谐波分量在这热流分布。
空间三次谐波磁通连接每个定子绕组是相同的,这是由于定子磁链的功能。
该空间三次谐波磁通连接每个转子绕组的空间方程:方程表明,该空间第三谐波磁通是一个零序分量。
在这一点上,有必要考虑到定子绕组连接以及计算的影响。
因此,对一个三角形连接定子绕组,空间三次谐波气隙磁通会诱使电流在转子以及在定子上循环。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考虑铁芯磁饱和的开关磁阻电机电感及转矩解析建模 左曙光;刘明田;胡胜龙 【摘 要】针对开关磁阻电机电感的非线性问题,提出了一种开关磁阻电机非线性电感解析计算模型,并在此基础上完成了电磁转矩的解析计算.运用分布式等效磁路法并考虑铁芯磁饱和的影响,通过分别确定各条磁路中气隙和铁芯的等效长度及磁导率,建立了含电机参数的非线性电感解析模型,并通过电感的有限元仿真结果验证了解析模型的准确性.在利用该电感解析模型求解得到磁链曲线族的基础上,使用能量法对电磁转矩进行了解析计算,并将电磁转矩的解析结果与有限元仿真结果进行了对比,结果表明:建立的非线性电感解析模型能够准确地预测出电机的动态电感,相对误差在9%以内,电磁转矩峰值处误差在6%以内,提出的电感解析模型能够获得较高精度的电感和转矩解析结果.
【期刊名称】《西安交通大学学报》 【年(卷),期】2019(053)007 【总页数】9页(P118-125,143) 【关键词】开关磁阻电机;电感;转矩;铁芯磁饱和;解析计算 【作 者】左曙光;刘明田;胡胜龙 【作者单位】同济大学新能源汽车工程中心,201804,上海;同济大学新能源汽车工程中心,201804,上海;同济大学新能源汽车工程中心,201804,上海
【正文语种】中 文 【中图分类】TM352 开关磁阻电机与其他电机相比,具有结构简单、无永磁体、调速范围宽、成本低等优点,可作为电动汽车驱动电机的备选方案[1]。然而,转矩波动是影响其应用的主要问题之一。目前,一般从两个方面来解决转矩波动问题:一是对电机的本体结构进行优化,包括从定子和转子的结构等方面进行优化[2-4];二是使用现代控制理论进行控制,如转矩分配函数控制[5]、转矩预测控制[6]、滑模控制[7]等。然而,由于开关磁阻电机运行时大都处于铁芯磁饱和状态,具有很强的非线性,很难通过建模的方法来对开关磁阻电机的性能进行分析,因此对电机结构方面的优化需要通过大量的有限元仿真来实现,但这将花费大量的时间。所以,建立用于快速评价电机特性的开关磁阻电机数学模型尤为重要。 目前,关于开关磁阻电机电感与转矩建模方面的研究较多,具体包括:司利云等分别利用人工神经网络和最小二乘支持向量机等机器学习算法对磁链曲线族数据进行学习,建立了电机模型[8-9];Mikail等预先建立了磁链-电流-转子位置表,然后使用查表法建立了开关磁阻电机模型[10];Nirgude等利用函数解析法即通过对电感族数据进行参数拟合建立了电机模型[11];Djelloul-Khedda等从磁场的角度对开关磁阻电机进行解析计算,并建立了电机模型[12]。由此可见,目前对开关磁阻电机建模时大都需要磁链曲线族作为建模基础,而以上研究中这些数据都是通过进行大量的有限元仿真或者实验来获得的。 在关于电感/磁链的解析计算方面,主要存在半解析和全解析两种方法。在半解析的方法中,丁文等对5个特殊位置的磁链数据值利用傅里叶级数分解和反正切函数拟合建立了电感模型[13],Chen等对传统的磁链拟合模型进行了修正,建立了快速磁链模型[14],但以上被拟合的磁链数据仍需要有限元仿真或实验获得。在全解析的方法中,Radun仅对开关磁阻电机定子和转子非对齐位置处的电感进行了解析计算[15],Mao等通过对定子和转子的对齐和非对齐这两个特殊位置的电感进行解析计算,而对中间位置处的电感用直线或者直线进行修正来近似表征电感的变化趋势[16-17],但以上方法仅对开关磁阻电机特殊位置处的电感进行解析计算,且精度较差,而且仅适用于施加恒定电流的工况,不能满足实际情况中的分析需求。目前,能同时对特殊位置和非特殊位置下电感进行准确解析的研究较少,且对铁芯磁饱和的处理大都需要借助有限元仿真的结果,具体包括:邓智全等在对无轴承开关磁阻电机气隙磁导推导的基础上,同时对特殊位置和非特殊位置下的电感进行了解析计算,但磁路中忽略了铁芯磁饱和的影响,精度较差[18];Yu等引入铁芯磁饱和导致的磁导率降落量,对考虑铁芯磁饱和影响下的磁链进行了解析计算,但磁导率降落量需要借助有限元仿真来获得[19];Yavuz等使用磁通管法得到了电感的解析结果,但由于是将磁路集中等效,不仅需要对8个气隙位置处的磁导计算分别进行复杂的定义,而且需要额外通过计算或迭代确定铁芯中各部分磁路的面积[20-21]。 从上述文献可知,作为开关磁阻电机建模基础的磁链曲线族目前主要通过有限元仿真或实验方法获得,这将花费大量的时间,不利于对电机的性能进行研究和优化。在电感的解析方面:半解析的方法仍需要借助有限元仿真的结果;全解析的方法分为两类,第一类是仅对特殊位置处的电感进行解析,这显然无法满足实际分析的需求,第二类是对全位置进行电感解析计算,但却基本都需要借助有限元仿真来考虑铁芯磁饱和带来的影响,且大都对磁路进行等效集中划分,对铁芯磁饱和局部性的处理效果不佳。由此可见,对开关磁阻电机电感的解析计算相较于传统的永磁电机更为困难,非线性更严重,这主要是由于开关磁阻电机特有的双凸极结构和运行时存在的更严重的局部铁芯磁饱和导致的。 针对上述问题,本文针对一款6/4极开关磁阻电机,采用分布式等效磁路的方法,并考虑铁芯磁饱和的影响,建立了较为准确的非线性动态电感解析模型,通过该模型能快速获得磁链曲线族,并在此基础上利用能量法建立了转矩的解析模型,与有限元仿真的结果进行了对比验证。 1 电机主要参数 开关磁阻电机的定子和转子均为双凸极结构,定子和转子上均没有永磁体,结构简单。定子仅有集中绕组,转子没有绕组,也没有换向器和滑环等。根据定子和转子的相对位置,采用角度位置与电流斩波相结合的控制方式来开通和关断定子的相电流,从而产生电磁转矩。本文采用的开关磁阻电机的主要参数如表1所示。 2 非线性电感解析计算及有限元验证 2.1 非线性电感解析模型 对开关磁阻电机而言,互感可以忽略[22],因此开关磁阻电机的电感可以用自感表示,解析模型为 表1 开关磁阻电机的主要参数参数数值电流I/A30定子极数Ns6转子极数Nr4定子内径Rs/mm41.4转子外径Rr/mm41定子齿高hs/mm21.6转子齿高hr/mm11.5定子齿距θs/rad1.05定子极弧βs/rad0.56转子极弧βr/rad0.52铁芯长度lz/mm91.5绕组匝数N134
(1) 式中:L为电感;Ψ为磁链;R为磁路的磁阻;Λ为磁导。 由式(1)可知,磁导Λ是计算开关磁阻电机电感的关键。为准确计算磁导Λ,运用分布式等效磁路原理,将电机的磁路沿周向均匀划分成N0份,如图1所示。 图1 磁场磁路划分 与电路电阻的并联原理类似,可求得该相的等效磁导为
(2) 式中:m、k分别为电感计算的上界和下界所对应磁路的编号;Λn为第n条磁路的磁导,公式为 (3) 其中,Riron,n为第n条磁路铁芯的磁阻,Rair,n为第n条磁路气隙的磁阻,gn为第n条磁路的气隙长度,μ0为真空磁导率,Sn为第n条磁路的截面积,ln为第n条磁路的等效铁芯长度,μiron,n为第n条磁路的铁芯磁导率。 由于电机的磁路沿周向均匀划分为N0份,故Sn可用公式表示为 Sn=2πRslz/N0 (4) 从式(1)~(4)可知,只要确定了电感的计算范围(式(2)中的k、m)以及每条磁路中的未知参量(式(3)中的gn、μiron,n、ln),即可得到开关磁阻电机的电感。 2.1.1 电感的计算原则 电感计算范围的确定本质上是要确定式(2)中k和m的值,根据开关磁阻电机的结构以及运行过程中磁力线分布的特点,按照以下原则来计算电感。 (1)在定子和转子的齿极重叠之前,磁力线的分布比较分散,所以电感L由定子极两边距离分别在θs/2范围内的磁场决定,此时电感取决于该范围内每条磁路的计算结果,即电感计算的上下界m、k的取值为定值,如图2所示。 图2 定子和转子的齿极重叠之前的电感计算区域 (2)在定子和转子的齿极重叠之后,磁力线集中分布在定子和转子的齿极所对应的区域,故电感L由定子和转子的齿极对应区域的磁场决定,此时电感值取决于该范围内每条磁路的计算结果,即电感计算的上界m的取值为定值,而下界k的取值随着转子位置发生变化,如图3所示。 图3 定子和转子的齿极重叠之后的电感计算区域 2.1.2 等效气隙长度 为确定每条磁路中的等效气隙长度gn,运用磁通管法对开关磁阻电机磁场的等效气隙长度进行计算。若将电机的气隙磁场划分成定子区域、转子区域以及中间区域,则电机磁场在圆周上的等效气隙长度g(θ,t)可表示为 g(θ,t)=g0+g1(θ)+g2(θ,t) (5) 式中:g0为电机中间部分的气隙长度;g1(θ)为定子的等效气隙长度;g2(θ,t)为转子的等效气隙长度;θ为电机圆周的空间角度;t为转子转过的时间。第n条磁路的气隙长度gn为 gn=g(θn,t) (6) 其中θn为第n条磁路对应的空间角度。 由于电机中间部分的气隙长度g0为定值,取为4×10-4 m,所以下面针对定子与转子的等效气隙长度分别进行讨论。 (1)定子的等效气隙长度g1(θ)。图4是定子和转子的等效气隙,可以发现,在定子齿顶处的等效气隙长度为零,而齿侧部分的等效气隙长度是与圆周空间角度有关的同心圆弧长,图4中的L1和L2分别表示定子和转子部分同心圆的半径。孙剑波等指出,在磁通管法中使用直线及圆弧代替实际的磁力线会引入误差,可以通过引入定子磁极两侧的倾角β1和转子磁极两侧的倾角β2进行修正[23]。所以,定子部分的等效气隙长度可以表示为
(7) (8) 式中αsr为定子和转子极轴线之间的夹角。 将定子的等效气隙长度进行傅里叶分解,得到