第十章 机械传动系统及其传动比
第十章 机械传动系统及其传动比 第一节 定轴轮系的传动比计算
在实际应用的机械中,为了满足各种需要,例如需要较大的传动比或作远距离传动等,常采用一系列互相啮合的齿轮来组成传动装置。这种由一系列齿轮组成的传动装置称为齿轮系统,简称轮系。 一、轮系的分类
轮系有两种基本类型:
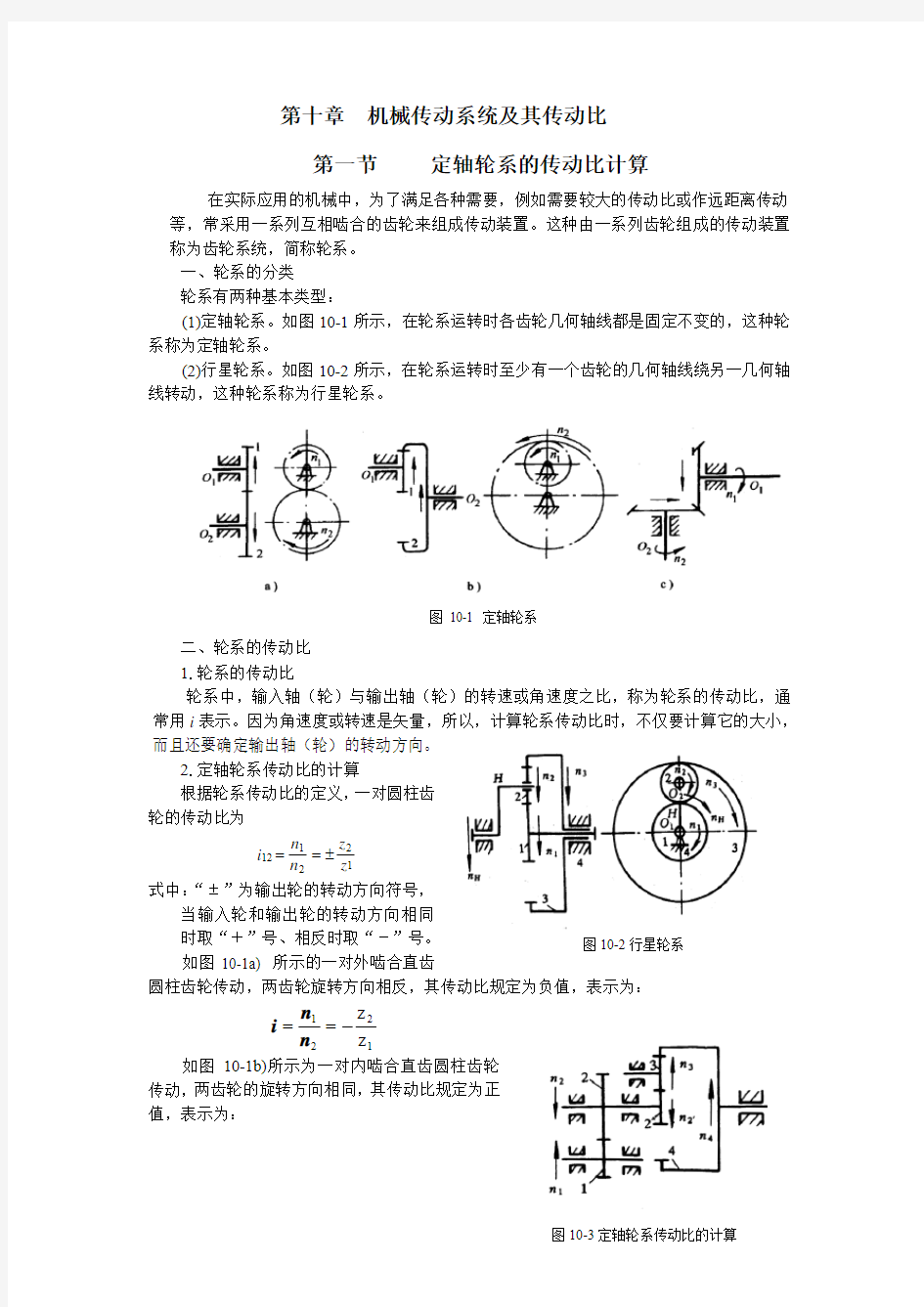
(1)定轴轮系。如图10-1所示,在轮系运转时各齿轮几何轴线都是固定不变的,这种轮系称为定轴轮系。
(2)行星轮系。如图10-2所示,在轮系运转时至少有一个齿轮的几何轴线绕另一几何轴线转动,这种轮系称为行星轮系。
二、轮系的传动比 1.轮系的传动比
轮系中,输入轴(轮)与输出轴(轮)的转速或角速度之比,称为轮系的传动比,通常用i 表示。因为角速度或转速是矢量,所以,计算轮系传动比时,不仅要计算它的大小,而且还要确定输出轴(轮)的转动方向。
2.定轴轮系传动比的计算 根据轮系传动比的定义,一对圆柱齿轮的传动比为
i 121221z z n n ±==
式中:“±”为输出轮的转动方向符号,
当输入轮和输出轮的转动方向相同时取“+”号、相反时取“-”号。 如图10-1a) 所示的一对外啮合直齿
圆柱齿轮传动,两齿轮旋转方向相反,其传动比规定为负值,表示为:
1
2
21z z =
=n n i 如图10-1b)所示为一对内啮合直齿圆柱齿轮传动,两齿轮的旋转方向相同,其传动比规定为正值,表示为:
图 10-1 定轴轮系
图10-3定轴轮系传动比的计算
图10-2行星轮系
1
2
21z z =
=
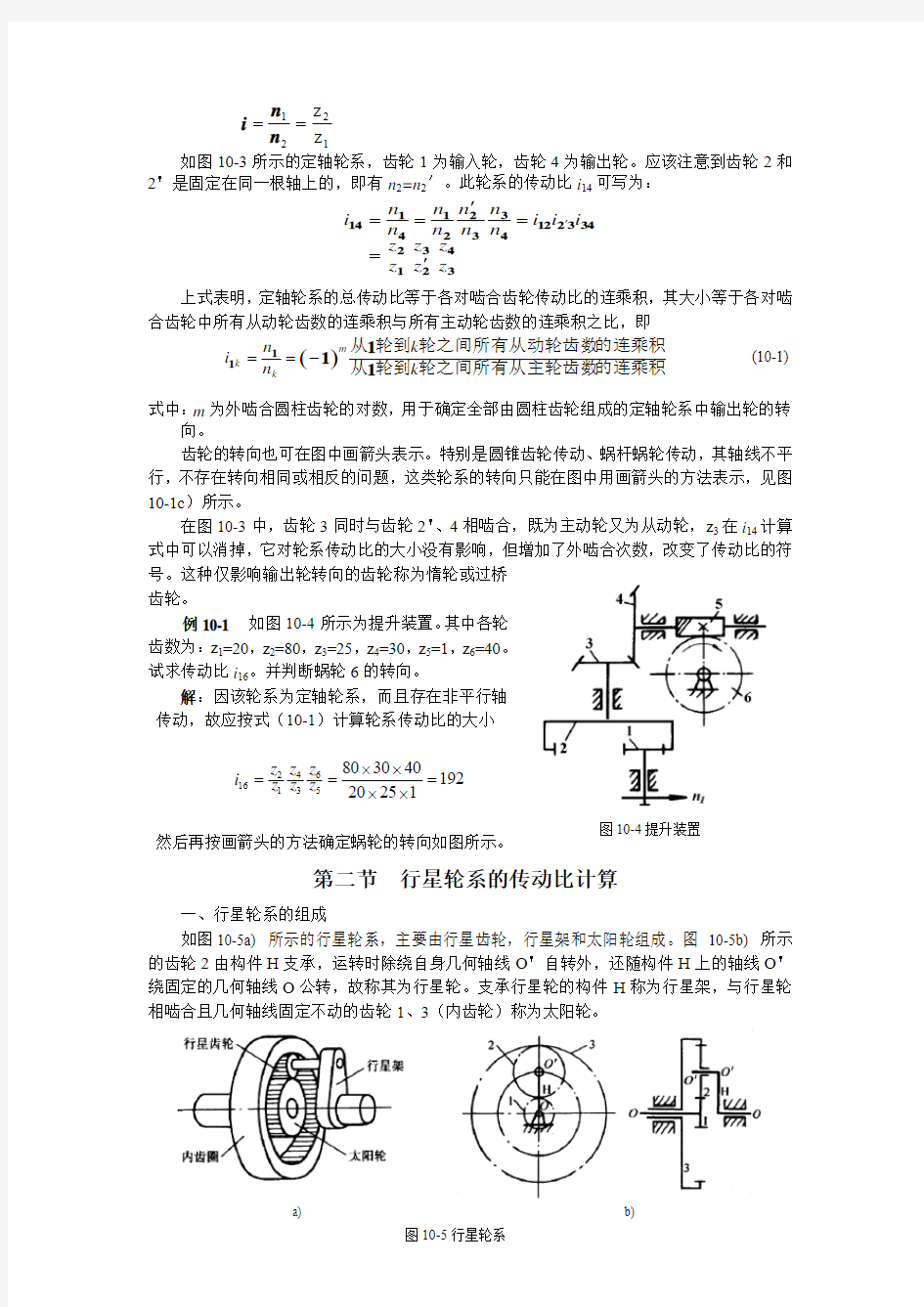
n n i 如图10-3所示的定轴轮系,齿轮1为输入轮,齿轮4为输出轮。应该注意到齿轮2和2'是固定在同一根轴上的,即有n 2=n 2′。此轮系的传动比i 14可写为:
34
231234
32124
332214114z z z i i i n n
n n n n n n i '=
='==' 上式表明,定轴轮系的总传动比等于各对啮合齿轮传动比的连乘积,其大小等于各对啮
合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比,即
()的连乘积轮之间所有从主轮齿数轮到从的连乘积
轮之间所有从动轮齿数轮到从k k n n i m k k 11111-== (10-1)
式中:m 为外啮合圆柱齿轮的对数,用于确定全部由圆柱齿轮组成的定轴轮系中输出轮的转
向。
齿轮的转向也可在图中画箭头表示。特别是圆锥齿轮传动、蜗杆蜗轮传动,其轴线不平行,不存在转向相同或相反的问题,这类轮系的转向只能在图中用画箭头的方法表示,见图10-1c )所示。
在图10-3中,齿轮3同时与齿轮2'、4相啮合,既为主动轮又为从动轮,z 3在i 14计算式中可以消掉,它对轮系传动比的大小没有影响,但增加了外啮合次数,改变了传动比的符号。这种仅影响输出轮转向的齿轮称为惰轮或过桥齿轮。
例10-1 如图10-4所示为提升装置。其中各轮齿数为:z 1=20,z 2=80,z 3=25,z 4=30,z 5=1,z 6=40。试求传动比i 16。并判断蜗轮6的转向。
解:因该轮系为定轴轮系,而且存在非平行轴传动,故应按式(10-1)计算轮系传动比的大小
然后再按画箭头的方法确定蜗轮的转向如图所示。
第二节 行星轮系的传动比计算
一、行星轮系的组成
如图10-5a) 所示的行星轮系,主要由行星齿轮,行星架和太阳轮组成。图10-5b) 所示的齿轮2由构件H 支承,运转时除绕自身几何轴线O '自转外,还随构件H 上的轴线O '绕固定的几何轴线O 公转,故称其为行星轮。支承行星轮的构件H 称为行星架,与行星轮相啮合且几何轴线固定不动的齿轮1、3(内齿轮)称为太阳轮。
图10-4提升装置
a) b)
图10-5行星轮系
192
1
252040308056341216=????==z z
z z z z i
因为行星轮除绕本身轴线自转外,还随行星架绕固定轴线公转,所以行星轮系的传动比计算不能直接采用定轴轮系传动比计算公式。最常用的方法是转化机构法,也称反转法。
定轴轮系和行星轮系的根本区别在于行星轮的公转。实际上,我们完全可以认为定轴轮系是行星轮系中公转速度等于零的特例。换言之,当行星轮的公转速度等于零时,该行星轮系就变成了定轴轮系。现假想给图10-6a)所示的整个行星轮系,加上一个与行星架的转速n H 大小相等方向相反的公共转速“-n H ”,则行星架H 的转速从n H 变为n H +(-n H ),即变为静止,而各构件间的相对运动关系并不变化,此时行星轮的公转速度等于零,得到了假想的定轴轮系(图10-6b )。这种假想的定轴轮系称为原行星轮系的转化轮系。转化轮系中,各构件的转速见表10-1所示:
表10-1 转化轮系中各构件的转速
转化轮系中1、3两轮的传动比可根据定轴轮系传动比的计算方法得
()
1321321313
113
z z =z z z
z 1===H H H H H n n n n n n i
将以上分析归纳为一般情况,可得转化轮系传动比的计算公式为
的连乘积
轮之间所有从主轮齿数轮到从的连乘积轮之间所有从动轮齿数轮到从k G k G n n n n i H k H G H
GK ±=--= (10-2)
式中:G 为主动轮,K 为从动轮。
应用上式求行星轮系传动比时须注意: (1)将n G 、n K 、n H 的值代入上式时,必须连同转速的正负号代入。若假设某一转向为正,则与其反向为负。
(2)公式右边的正负号按转化轮系中G 轮与K 轮的转向关系确定。
(3)在n G 、n K 、n H 三个参数中,已知任意两个,就可确定第三个,从而求出该行星轮系
中任意两轮的传动比。GK H
GK i i ≠;H
K
H G
H G K n n i =为转化轮系中G 轮与K 轮转速之比,其大小及正负号按定轴轮系传动比的计算方法确定。K G GK n n i = 是行星轮系中G 轮与K
图10-6行星轮系及其传动比的计算
轮的绝对速度之比,其大小及正负号由计算结果确定。
例10-2 在图10-6a )所示的行星轮系中,已知 n 1=100 r/min ,轮3固定不动,各轮齿数
为z 1=40,z 2=20,z 3=80。求①H n 和2n ;②H
i 12和12i 。
解:由式(10-2)得 1
313113
1z z n n n n i H H H
)(-=--= 取n 1的转向为正,将n 1=100 r/min ,n 3=0代入上式得:n H =33.3r/min 求得的n H 为正,表示n H 与n 1的转向相同。
由式(10-2)2
1402011212112-=-=-=--=z z n n n n i H H H
)(
仍取1n 的转向为正,将n 1=100 r/min 代入上式得: n 2=-100r/min
求得的 n 2为负值,表示n 2与n 1 的转向相反。
注意: 1212i i H
≠ ; 1
212z z i -≠。
例10-3图10-7所示为圆锥齿轮组成的轮系,已知各轮齿数z 1 = 45,z 2 = 30,z 3 = z 4 = 20 ;n 1=60r/min,n H =100r/min,若n 1与n H 转向相同,求n 4、i 14。 解:由式(10-2)得
20
×4520
×30±
=z z z z ±==31424114
H H H n n n n i 用画箭头的方法可知转化轮系中H n 1与H
n 4的转向相同,故H i 14应为正值。即
45
30
4114=
--=
H H H n n n n i 将 n 1= 60r/min ,n H =100r/min 代入上式得
45
30180180604=
--n
解得n 4 = 40 r/min ,。由此得
5.140
60
4114===
n n i 正号表明1、4两齿轮的实际转向相同。
第三节 典型机械传动系统及其传动比计算
一、机械传动系统的一般组成及各种传动形式的选择
如图10-8 所示带式输送机,由电动机(原动机)经减速器及链传动(传动系统)将运动和动力传给带轮,用皮带传动(执行机构)完成货物的输送。由此可见,机械传动系统是
1100
100
2
112-=-
==
n n
i
图10-7圆锥齿轮行星轮系
图10-8带式输送机 图10-9牛头刨床
将原动机的动力传给工作机的中间装置,原动机通过传动系统驱动工作机工作。显然,传动系统是机器三大组成部分中的重要组成部分,是机械设计中关键的一环。
为了满足生产过程的各种运动要求,机器并不只是由某一种机构或传动件组成的,而是由多种机构和传动件组合成机械系统。其中,传动系统占的比重最大。传动系统的设计,主要是传动类型的选择及其组合设计。如第一章中叙述的牛头刨床(图10-9),要把原动机的运动转换为执行机构(滑枕、工作台)所需要的运动,单靠某一种机构或传动件是很难实现的,需要根据各执行构件协调动作的要求,将带传动、齿轮传动和连杆机构等一些传动件和机构组合起来,构成一个传动系统,才能完成这一工作。
为了将多种机构和传动件组合应用,使机器能完成某一生产过程的各种运动要求,必须合理地解决传动类型的选择及组合设计问题。为此,应了解前面所学各种传动形式的特点、性能,如表10-2所示。
表10-2 各种传动形式的选择
在机械设计中,传动类型的选择及其组合设计,一般是根据对工作机的各项要求,考虑机械的工作条件,参照各种传动形式的特点、性能,选择几个传动类型进行组合设计,然后通过技术分析和经济评比等,确定最优方案。最后根据前面所学的知识,设计、计算各种传动机构的参数、强度、传动比等。
选择传动类型的基本原则如下:
(1)大功率、高速和长期使用的机械,应选用承载能力大、效率高、传动平稳的齿轮传
动等传动形式。
(2)中、小功率、速度较低、传动比较大的机械,可采用蜗杆传 动、齿轮传动、带、链与齿轮组合传动等。
(3)工作环境恶劣或要求保持环境整洁时宜采用闭式传动。
(4)相交轴间的传动,可用圆锥齿轮传动,交错轴间的传动,可采用蜗杆传动等。 例10-4 图10-8所示为式输送机传动装置,为了降速及远距离传动,采用了减速箱及链传动,带传动等机构,其中减速箱是机械传动中常用的装置。已知各轮齿数z 1=17,z 2=51,z 2′=17,z 3=60,z 3′=18,z 4=34,滚筒直径d =360mm ,试求输送带的速度,并指出电动机的转向。
解:该轮是由圆锥齿轮、圆柱齿轮及链传动组成的定轴轮系,故由式(10-1)得
2018171734
60513
214324
14=????=''=
=
z z z z z z n n i 电 将电n = 960 r/min 代入上式得
960/n 4=20, 则n 4=48 r/min
已知滚筒直径d =360 mm ,故滚筒圆周速度即带速为
7.542864836014.34=??===dn dn v ππ筒mm/min= 0.9m/s
电动机的转向可从带的运动方向开始画箭头确定,如图中所示。
二、轮系在各种机械设备中的主要功能
由前述可知,轮系广泛用于各种机械设备中,其功能主要有以下几个方面: 1.传递相距较远的两轴间的运动和动力
当两轴间的距离较大时,若仅用一对齿轮来传动,则齿轮尺寸过大,既占空间,又浪费材料(图10-10中双点划线所示)。改用轮系传动,就可克服上述缺点(如图10-10中实线所示)。
2.实现变速、变向传动
金属切削机床、汽车、起重设备等机械中,在主轴转速不变的情况下,输出轴需要有多种转速(即变速传动),以适应工作条件的变化。如图10-11所示汽车变速箱,输入轴Ⅰ与发动机相连,输出轴Ⅳ与传动轴相连,Ⅰ轴与Ⅳ轴之间采用了定轴轮系。当操纵杆移动齿轮4或6,使其处于啮合状态时,可改变输出轴的转速及方向。
3.可获得大的传动比
当两轴间的传动比要求较大而结构尺寸要求较小时,可采用定轴轮系或行星轮系来达到目的。如图10-12所示自动进刀读数装置的行星轮系,若已知z a =100,z g =z f =20,z b =99。则主动手柄K 与读数盘W(从动轮)的传动比i H a 可由(10-2)式有
图10-10远距离两轴间的传动 图10-11汽车变速箱
20
10099
20a a a ??=
=--=f b g H b H H b
z z z z n n n n i (其中0=b n ) 解上式得 100a =H i 。
又如图10-13 所示渐开线少齿差行星减速器,若已知各轮齿数z 1=100,z 2=99,z 2′=100,z 3=101,可由式(10-2)得:
1001001019902
13213113??='=--=--=z z z z n n n n n n n i H H H H H
求出 10000
1=H i 。为正,说明行星架的转向与齿轮1的相同。
由此例可知,行星架H 转10000圈太阳轮1只转一圈,表明机构的传动比很大。
4.用于运动的合成分解
如图10-14所示滚齿机行星轮系中,z 1 = z 3,分齿运动由轮1传入,附加运动由行星架H 传入,合成运动由齿轮3传出,由式(10-2)有
11
33113
-=-=--=z z n n n n i H H H
解上式得n 3 = 2n H -n 1 ,可见该轮系将两个输入运
动合成一个输出运动。
如图10-15所示汽车差速器是运动分解的实例,当汽车直线行驶,左右两后轮转速相同,行星
轮不自转,齿轮1、2、3、2'如同一个整体,一起随齿轮4转动,此时n 3=n 4= n 1,差速器起到联轴器的作用。
汽车转弯时,左右两轮的转弯半径不同,两轮行走的距离也不相同,为保证两轮与地面作纯滚动,要求两轮的转速也不相同。此时,因左右轮的阻力不同使行星轮自转,造成左右半轴齿轮1和3连同左右车轮一起产生转速差,从而适应了转弯的需求。差速器此时起到运动分解的作用。
三、新型齿轮系及应用
在机械传动中,除广泛应用的定轴轮系、行星轮系和复合轮系外,还有其它一些特殊的行星传动:渐开线少齿差行星传动、摆线针轮行星传动和谐波齿轮传动等。它们的共同特点是结构紧凑、传动比大、重量轻和效率高。在机械、轻工、化工、仪表、纺织等行业中得到广泛的应用。
1.渐开线少齿差行星传动
图10-12自动进刀读数装置
图10-13少齿差行星轮系 图10-14滚齿机行星轮系
图10-15汽车后桥差速器
图10-16所示为渐开线少齿差行星传动示意图,主要由太阳轮1(内齿轮),行星轮2,行星架H (常做成偏心轴结构)和一个输出机构WV 组成。运转时太阳轮1不动,运动由行星架H 输入,经行星轮2通过输出机构输出。由于太阳轮和行星轮的齿数相差很少(通常为1~4)故称少齿差行星传动。
其传动比可由式(10-2)求得
2
11221
z n n i H H H
=-= 将n 1= 0代入得
2
12
2z z z i i H HV --==
上式中齿数差z 1-z 2=1时,称为一齿
差行星轮系,其传动比2z i HV -=(此时
的HV
i 为最大值),式中负号表示H 与轮
2的转向相反。
2.摆线针轮行星传动
摆线针轮行星传动与渐开线少齿差行星传动的减速原理、输出机构形式是相似的。主要由摆线少齿差齿轮副(摆线轮、针轮)、行星架及输出机构组成。不同之处在于太阳轮采用带套筒的圆柱形针轮并与机架固定,行星轮采用摆线齿轮。如图10-17所示。
摆线针轮行星传动也称摆线少齿差传动,太阳轮齿数与行星轮齿数之差为1。其传动比与前述相
同。
3.谐波齿轮传动
如图10-18所示,谐波齿轮传动主要由波发生器(由转臂和滚轮组成,相当于行星 架)、刚轮(相当于太阳轮)、柔轮(相当于行星轮)等基本构件组成。柔轮与刚轮的齿距相同,但柔轮比刚轮少几个齿。
波发生器一般作为主动件,柔轮为从动件,而刚轮固定。柔轮为一薄壁构件,易变形,它的外壁有齿,内壁孔径略小于波发生器长度。在波发生器作用下,迫使柔轮产生弹性变形而呈椭圆形,椭圆长轴
两端附近的柔轮外齿和刚轮的内齿啮合,
而在短轴两端附近的轮齿完全脱开,其它
各处的轮齿则处于啮合和脱开的过渡阶段。当波发生器转动时,柔轮长、短轴的位置不断变动,从而使柔轮轮齿依次产生的弹性变形近似于谐波,故称谐波齿轮传动。
它的啮合过程和行星齿轮完全相同,故传动比可按行星轮计算,由式(10-2)有
g b H b H g H
gb z z n n n n i =--=
解得 g
b g
HV z i -
=,i HV 为负值表明柔轮和波发生器转向相反。齿数差z b -z g 应等于波
数或其整数倍。
图10-16渐开线少齿差行星轮系
图10-18谐波齿轮传动
图10-17摆线针轮行星轮系
习题十
10-1定轴轮系与行星轮系有何区别。试举例说明它们在生产中的应用。 10-2如何计算定轴轮系的传动比?怎样确定它们的转向?
10-3何谓转化轮系?H ab i 与ab i 有何本质区别?H
ab i 是行星轮系中a 、b 两轮间的传动比吗?
10-4行星轮系的传动比如何计算?运用式(10-2)时要注意哪些问题? 10-5轮系在机械传动中主要有哪些作用? 10-6三种其它类型行星传动有哪些共同特点?
10-7如图所示定轴轮系,已知各轮齿数z 1=20,z 2=50,z 3=15,z 4=30,z 5=1,z 6=40,求传动比16i ,并标出蜗轮的转向。
10-8如图所示机床主轴变速箱传动简图。已知电机转速n 1=1440 r/min,带轮直径D 1=125mm ,D 2=250mm ;各齿轮齿数如图示。求:(1)机床主轴可获得多少种转速?(2)机床主轴的最低及最高输出转速各是多少?
10-9如图所示为某一机床回转工作台的传动机构,已知z 1=160,z 2=20,马达转速n M =14 r/min ,求回转工作台H 的转速n H 的大小及其转向。
10-10在图示的圆锥齿轮组成的轮系中,已知n a =85 r/min ,各轮齿数为z a =20,z g =30,z f =50,z b =80;求H n 的大小和方向。
10-11图示为车床溜板箱手动操纵机构。已知轮1、2的齿数为杂z 1=16,z 2=80;齿轮3的齿数为z 3=13,模数m =2.5mm,与齿轮3啮合的齿条被固定在床身上。试求当溜板箱移动速度为1 m/min 时手轮的转速。
题10-7图 题10-8图
题10-9图 题10-10图
题10-11图
中考物理压轴题专题机械效率的计算的经典综合题
一、初中物理有用功额外功总功机械效率的计算问题 1.如图是工人将重160 N 的物体匀速放下的过程,已知物体下降的距离为3 m ,用时3 s ,工人的拉力为50 N ,工人质量为50kg (物体未浸入水中,且不计绳重及摩擦)设此时工人放绳的速度为v 1, 滑轮组的效率η1 ;如果物体完全浸没水中后滑轮的机械效率为 η2,已知124 3ηη=∶∶(物体在水中仍匀速下降,动滑轮不会浸入水中且不计绳重及摩擦,g 取10 N/kg ) 设当物体完全浸没在水中后物体所受的浮力为F 浮,工人对地面的压力为F 2.则( ) A .v 1=1 m/s B .η1=62.5%。 C .F 2 =525 N D .F 浮=120 N 【答案】C 【解析】 【分析】 【详解】 A .物体下降速度为 3m =1m/s 3s h v t = = 因为有4段绳子,所以工人放绳的速度为 441m/s 4m/s v v ==?=1物 故A 不符合题意; B .已知物体下降的距离为3 m ,因为有4段绳子,所以绳子运动距离 443m 12m s h ==?= 放绳子的做的有用功 160N 3m 480J W Gh ==?=有用 放绳子的做的总功 50N 12m 600J W Fs ==?=总 滑轮组的效率 1480J 100%100%80%600J W W η=?=?=有用总 故B 不符合题意; CD .物体未浸入水中时,不计绳重及摩擦,动滑轮受到重物对它的拉力、本身的重力、绳子的拉力,由(1 )F G G n = +动 可得,动滑轮重力
4450N 160N 40N G F G =-=?-=动 已知η1:η2=4:3,则物体完全浸没水中后滑轮组的机械效率为 213380%60%44 ηη==?= 物体完全浸没水中后,滑轮组对物体的拉力做的功为有用功,不计绳重及摩擦,克服动滑轮重力做的功为额外功,则此时滑轮组的机械效率 260%40N W F h F W F h G h F η'= ==='++有用拉物拉物 总拉物动拉物 解得F 拉物=60N ;物体的重力为160N ,根据公式可得 ==160N-60N=100N F G F -浮拉物 故D 不符合题意; 完全入水后,动滑轮受到重物对它向下的拉力、本身向下的重力、4段绳子向上的拉力,由力的平衡条件可得 4F F G =+绳拉物动 则人对绳子的拉力 11 60N 40N)25N 44 ()(F F G =+=+=绳拉物动 因为物体间力的作用是相互的,所以绳子对人的拉力也为25N ;人的重力为 50kg 10N/kg 500N G m g ==?=人人 对人进行受力分析可知,人受竖直向下的重力、竖直向下的拉力、竖直向上的支持力,则人受到竖直向上的支持力 500N+25N=525N F G F =+=人绳支 因为物体间力的作用是相互的,则人对地面的压力为525N ,故C 符合题意。 故选C 。 2.如图所示,工人用250 N 的力将重400 N 的物体匀速提升2 m 。若不计绳重及摩擦,绳子自由端移动的距离是____m ,动滑轮的重力为____N ,该滑轮组的机械效率是______。
徐工集团工程机械股份有限公司_中标190920
招标投标企业报告徐工集团工程机械股份有限公司
本报告于 2019年9月19日 生成 您所看到的报告内容为截至该时间点该公司的数据快照 目录 1. 基本信息:工商信息 2. 招投标情况:中标/投标数量、中标/投标情况、中标/投标行业分布、参与投标 的甲方排名、合作甲方排名 3. 股东及出资信息 4. 风险信息:经营异常、股权出资、动产抵押、税务信息、行政处罚 5. 企业信息:工程人员、企业资质 * 敬启者:本报告内容是中国比地招标网接收您的委托,查询公开信息所得结果。中国比地招标网不对该查询结果的全面、准确、真实性负责。本报告应仅为您的决策提供参考。
一、基本信息 1. 工商信息 企业名称:徐工集团工程机械股份有限公司统一社会信用代码:913203001347934993工商注册号:320300000017304组织机构代码:134793499 法定代表人:王民成立日期:1993-12-15 企业类型:/经营状态:存续 注册资本:783366.843万人民币 注册地址:江苏省徐州经济技术开发区驮蓝山路26号 营业期限:1993-12-15 至 / 营业范围:工程机械及成套设备、专用汽车、建筑工程机械、物料搬运设备及配件、矿山机械、环卫机械、商用车、载货汽车、工程机械发动机、通用基础零部件、仪器、仪表、衡器制造、加工、销售、维修;环保工程施工;二手车机械再制造、收购、销售、租赁。(依法须经批准的项目,经相关部门批准后方可开展经营活动) 联系电话:*********** 二、招投标分析 2.1 中标/投标数量 企业中标/投标数: 个 (数据统计时间:2017年至报告生成时间) 304
传动比计算
传动比计算 一、已知轮系中各齿轮的齿数分别为Z 1=20、Z 2=18、 Z 3=56。求传动比i 1H 。 解:1-3为太阳轮,2为行星轮,H 为行星架 8.22056 1 3 3113-=- =-=--= z z n n n n i H H H 03=n 8.31=∴H i 1、如图所示轮系中,已知241=z ,482=z ,302='z ,903=z , 403='z ,204=z ,805=z ,求传动比i H 1。又当 n 1=1450r/min 时,n H =?(15分) 2、 图示轮系,已知:Z 1=20,Z 2=40,Z 3=80,Z 4=Z 5=30,Z 6=90。求i 16= n3=n4 (n4/n6)=(z6/z4)=3 nH=n6 (n1-n6)/(n3-n6)=-(z3/z1)=-4 i16=-7 解: 1、2、3、H 为周转轮系, ()()630 24904821323113 -=??=-=--='Z Z Z Z n n n n i H H H 3/、4、5为定轴轮系 23535353-====''H n n n n n n i 得H n n 23-= 联立以上二式得 ()()() () 62131-=---=--H H H H H n n n n n n n n 所以191 1== H H n n i min /3.76191r n n H ==
2、Z 1=15,Z 2=25,Z 3=20,Z 4=60。n 1 =200r/min (顺时针)n 4=50r/min (顺时针)试求H 的转速。 解:1、4为太阳轮,2、3为行星轮,H 为行星架 5201560 253 14 24114-=??- =-=--= z z z z n n n n i H H H min /755 50200r n n n H H H =-=-- H 的转速为75r/min ,顺时针方向。 步骤: 1. 先看准图,看清图! 2. 拆分! 3. 按照拆分的结果进行组合! 4. 1、 图示为滚齿机滚刀与工件间的传动简图,以知各轮的齿数为: Z 1=35,z 2=10,Z 3=30,z 4=70,Z 5=40,Z 6=90,Z 7=1,Z 8=84.求毛坯回转一转时滚刀轴的转数。 解: 126140303584 9070107 5318 6428118=??????= = =z z z z z z z z n n i 答:毛坯回转一周滚刀轴转126转。 5. 图示轮系,已知各轮齿数Z 1=Z 2'=41,Z 2=Z 3=39,求手柄H 与轮1的传动比 i 1H 。
静液压传动工程机械的制动系统
静液压传动工程机械的制动系统 摘要国内外研制和应用静液压传动的工程机械越来越多,本文简要介绍了其制动系统的特点、类型,分析了不同工况下制动系统的作用以及不同制动系统的应用范围。 关键词:静液压传动工程机械制动系统 根据技术要求及通行安全,采用静液压传动的工程机械与常规机械一样,需要具备行走制动、停车制动和应急制动等3套制动系统。它们的操纵装置必须是彼此独立的。 1 行车制动系统 行车制动系统应能在所以运行状态下发挥作用。它首先用以使运动中的车辆减速,继而在必要时使车辆完全停止运动处于静止状态。对行走制动系统的要求是:第一,在车辆运动的整个速度范围内均能产生足够的制动阻力,使车辆减速直至停车;第二,具有足够的耗能或贮能容量来吸收车辆的动能;第三,行走制动装置的作用必须是渐进的;第四,行走制动系统的操纵功能必须是独立的,不应受其它正常操纵机构的影响,不能在离合器分离或变速器空档时丧失制动能力。从原则上说,凡是能完全满足上述要求的装置,均可用于行走制动系统。行走制动是使用最频繁的制动装置,一般称为主制动系统。 现代工程机械行走制动系统除普遍采用带有较大容量的制动盘、鼓等摩擦式机械制动器作为主执行元件外,也越来越多地利用发动机排气节流、电涡流、液涡流等作为辅助的吸能装置。后几种装置的优点是本身没有产生磨损的元件,能更好地控制减速力(矩),从而减少主制动元件(刹车盘、片等)的磨损和延长其使用寿命。但它们的制动力都与行走速度有关,一般无法独立使车辆完全停止,只能作为辅助制动装置(缓速装置)来使用。 静液压传动系统由连接在一个闭式回路中的液压泵和液压马达构成。对这种传动装置所选用的泵和马达,除了有与一般液压元件相同的高功率密度、高效率、长寿命等性能要求外,还要求两者均能在逆向工况下运行,即在必要时马达可作为泵运行,泵可成为马达运行,使整个系统具备双向传输功率或能量的能力。这样当泵的输出流量大于马达在某一转速下需要的流量时,多余的流量就使马达驱动车辆加速,而加速力的反作用力通过马达使入口压力升高,液压能转化为车辆的动能增量;反之,如调节变量泵的排量使其通过流量不敷于马达的需求时,马达出口阻力增大,在马达轴上建立起反向扭矩阻止车辆行驶,车辆动能将通过车轮反过来的驱动马达使其在泵的工况下运行,并在马达出油口建立起压力,迫使泵按马达工况拖动发动机运转,车辆的动能将转化为热能由发动机和液压系统中的冷却器吸收并耗散掉。由于静液压传动系统产生的阻力(矩)原则上只取决于系统压力和马达排量而与行走速度无关,所以这种系统既能象上述“缓速器”那样使车辆减速,又能使其完全停止运动,不仅能满足行走制动全部功能要求,而且在制动过程中没有元件磨损且可控性良好。因此,静液压传动系统本身完全可以作为行走制动装置使用。装有静液压传动系统的车辆一般无须另行配置机械制动器,但系统中不能有驾驶员可随意操纵的使功率流中断的装置(如液压系统中的短路阀、马达与驱动之间的离合器或机械换
机械传动性能综合实验指导书
机械传动系统设计综合 实验指导书 目录 一、实验目的 (2) 二、实验内容 (2)
三、实验设备介绍 (2) 1. 实验设备的总体布局 (2) 2. 实验台各部分的安装连线 (3) 3. 实验台组成部件的主要技术参数 (5) 四、实验台的使用与操作 (5) 五、测试软件介绍 (7) 1.数据操作面板 (8) 2.电机控制操作面板 (8) 3.下拉菜单 (9) 六、实验注意事项 (14) 附录1:机械传动方案设计和性能测试综合实验任务卡 (15) 附录2:机械传动方案设计和性能测试综合实验方案书 (16) 附录3:机械传动方案设计和性能测试综合实验报告 (16) 附录4:实验系统各模块展示 (17) 附录5:转矩转速传感器介绍 (25) 一、实验目的 1.了解机械传动性能综合测试的工作原理和方法及计算机辅助实验的新方法; 2.掌握机械传动合理布置的基本要求和机械传动方案设计的一般方法;
3.加深对常见机械传动装置传动性能的认识和理解; 4.培养学生根据机械传动实验任务,进行自主实验的能力。 二、实验内容 1.从附录1中选择3~4个实验任务,自主设计满足要求的机械传动系统,并参照 附录2写出实验方案书; 2.按照所设计传动系统的组成方案在综合实验台上搭接机械传动性能综合测试系 统,并进行主电机转速一定载荷变化的性能测试及绘制性能参数曲线(转速曲线、 转矩曲线、传动比曲线、功率曲线及效率曲线等); 3.根据测试结果分析传动系统设计方案。 三、实验设备介绍 1.实验设备的总体布局 “机械传动性能综合测试实验台”由变频电机、联轴器、机械传动装置、加载装置(磁粉制动器)、转矩转速传感器和工控机等硬件模块及测试软件组成,如下图所示。变频电机、机械传动装置、加载装置(磁粉制动器)、转矩转速传感器之间用联轴器连接;两转矩转速传感器的信号线分别与安装在工控机主板上的两块转矩转速测试卡联接,两转矩转速传感器的信号由此传入工控机,系统性能参数的测量通过测试软件控制。学生可以根据不同的设计任务,设计相应的实验方案,选用不同机械传动装置,在此实验台上进行各种不同传动系统的搭建、安装调试和传动系统的各种性能测试,并分析系统传动性能,完成设计性实验、综合性实验或创新性实验。
徐工集团quy000产品简介 ()
Q U Y1000履带起重机 产品简介 徐工集团工程机械股份有限公司 二O一O年五月 QUY1000履带起重机是我公司为满足煤化工、核电、石化等大型工程的吊装需求、积极参与国际竞争而研制开发的超大吨位高端起重机产品。该机综合吸收国内外先进技术,运用先进的设计手段,结构设计优化,起重性能卓越。该机采用履带式底盘、多组合桁架式吊臂,具有接地比压小、可带载行驶、起升高度大、起重性能高等优点,塔式副臂可紧靠建筑物施工,可变超起配重半径的超起装置可提供超强的起重性能和机动灵活性。程序控制系统,保证起重机安全工作。闭式泵控变量液压系统,电比例操作,节能高效,控制精确。国际着名企业的电控、动力、传动元件,环保可靠。 2. 电比例操作系统,程序集成控制,充分体现以人为本的设计思想,实现了起重机的自动控制,大大提高起重机作业安全性、可靠性和作业效率。防水防尘措施的采用,保证了对恶劣工作环境的适应能力。 3. 液压系统为闭式泵控变量系统,与电比例操作系统紧密结合,大大提高起重机的控制性能,节能高效。微动性能好,动作平稳可靠。在液压系统特征点设置测压接头,方便系统运行状态监控和故障诊断。 4. 齐全的安全装置,彩色大屏幕实时监控发动机、作业状态及风速,确保起重机安全工作。 5. 桁架式吊臂,德国进口管材,重量轻,承载能力高。吊臂组合多,适用范围广。臂端单滑轮机构,可实现轻载的快速吊装,提高工作效率。 6. 美国康明斯发动机,德国高质量的液压、电气、传动元件和不旋转钢丝绳,确保了作业可靠性和环保性能。 7. 宽敞的操纵室,可调式座椅,配置冷暖空调和音响,环境舒适。工作时,操纵室可调整俯仰角度,扩大视野;运输时,操纵室可从侧方转到前方,减小运输宽度。
轮系及其传动比计算
第八章 轮系及其传动比计算 第四十八讲 齿轮系及其分类 如图8—1所示,由一系列齿轮相互啮合而组成的传动系统简称轮系。根据轮系中各齿轮运动形式的不同,轮系分类如下: ???? ? ? ?? ????? ?==?? ?成由几个周转轮系组合而和周转轮系混合而成或混合轮系:由定轴轮系)行星轮系()差动轮系(周转轮系(轴有公转)空间定轴轮系平面定轴轮系 定轴轮系(轴线固定)轮系12F F 图8—1 图8—2 图8—3 定轴轮系中所有齿轮的轴线全部固定,若所有齿轮的轴线全部在同一平面或相互平行的平面内,则称为平面定轴轮系,如图8—1所示,若所有齿轮的轴线并不全部在同一平面或相互平行的平面内,则称为空间定轴轮系;若轮系中有一个或几个齿轮轴线的位置并不固定,而是绕着其它齿轮的固定轴线回转,如图8—2,8—3所示,则这种轮系称为周转轮系,其中绕着固定轴线回转的这种齿轮称为中心轮(或太阳轮),即绕自身轴线回转又绕着其它齿轮的固定 轴线回转的齿轮称为行星轮,支撑行星轮的构 图8—4 件称为系杆(或转臂或行星架),在周转轮系中,一般都以中心轮或系杆作为运动的输入或输出构件,常称其为周转轮系的基本构件;周转轮系还可按其所具有的自由度数目作进一步的划分;若周转轮系的自由度为2,则称其为差动轮系如图8—2所示,为了确定这种轮系的运动,须给定两个构件以独立运动规律,若周转轮系的自由度为1,如图8—3所示,则称其为行星轮系,为了确定这种轮系的运动,只须给定轮系中一个构件以独立运动规律即可;在各种实际机械中所用的轮系,往往既包含定轴轮系部分,又包含周转轮系部分,或者由几部分周转轮系组成,这种复杂的轮系称为复合轮系如图8—4所示,该复合轮系可分为左边的周转轮系和右边的定轴轮系两部分。
工程机械动力传动系统的优化配置
工程机械动力传动系统的优化配置 摘要:机械动力传动系统的优化配置是改善机械性能和提高燃油经济性的重要手段。对动力传动系统进行优化配置,其技术经济效果显著。本文结合笔者多年工程机械教学经验,重点研究了改善工程机械的动力性能和燃料经济性。 关键词:工程机械动力传动优化 动力传动系统是工程机械的重要组成部分,它决定了整机的动力性能、作业性能、行驶性能和经济性等重要参数。工程机械不仅需要良好的机动性能,而且需要较高的作业率。特别是工程机械的动力传动系统比较复杂,有的机械需要边行驶、边作业,如装载机等;有的机械的作业装置具有多种作业机构,如:挖壕挖坑机的作业装置有铣刀和抛土器等。获取工程机械传动系统的载荷谱,才能得到合理、高效的动力传动系统功率。 一、采用新型装置组成传动系统 工作现场实践证明,采用微粒捕集器可以有效控制发动机工作过程中烟尘微粒的排放。特别是对于速度较低和中等以下载荷的工程机械,当所选微粒捕集器的负载参数选为 K54时,可以降低NO和CO的排放量,在一定程度上提高发
动机的功率,降低油耗,改善发动机的动力性能和经济性。 近年来国内外开发了一种成套高效传动装置(如德国的“ZF-EFFI”型),它包括主变速器、辅助变速器、轮边减速器、前桥、后桥、快速圆盘制动器和离合器等,同时装有停机待装管理系统。该系统可以在等待作业时处于睡眠状态,使之节能减耗。整个系统采用先进的信息化、数字化技术,配有智能化控制模块,种智能化控制模块是提高动力传动系统效率和节能降耗的核心技术。它能根据液力偶合器或变矩器的实时工况,控制变速器的相应工作,进而通过超越离合器装置控制发动机的转速,使发动机始终处于高效工况区段内,充分有效地利用发动机功率,从而达到降耗减排、经济运行的要求。 这套传动装置可代替工程机械的常规传动系统。在同等工作条件下完成相同的作业量,发动机的油耗可减少5%-20%,排放的污染物可减少10%-15%,设备生产效率可提高35%-40%;而且操作简便舒适,工作可靠性较高,使用寿命较长。 二、配置高效可靠的冷却系统 (一)采用自控系统控制温度 工程机械的载荷是不断变化的,因而工作油温也不断变化;通常情况下,工作油温在40-60℃范围内比较合适。传统的冷却系统,其风扇多为恒速运转,不能按照油温变化随
徐工集团员工手册
徐州工程机械集团有限公司 员工手册 ? 目? 录 第一章? 总则 第二章? 员工行为规范 第三章? 劳动关系 第四章? 入职及入职培训 第五章? 作息与休假制度 第六章? 薪酬政策 第七章? 保险、福利和劳动防护 第八章? 培训与发展 第九章? 违纪处理 第十章? 奖励 第十一章? 其他规定 第十二章? 附则 ? ?
第一章?总则 ? 第一条引言 徐工全体员工均应熟悉和遵守本手册。 本手册可以帮助你了解公司的概况、文化理念、需要遵守的规章制度、享有的基本权利和应尽的基本义务等多方面的内容,如对手册所述的方针政策和规章制度有任何疑问,请与部门负责人或所在单位人力资源部门联系。 衷心祝愿你工作愉快,并期待你用智慧、爱心和汗水谱写出公司发展和个人成长高度和谐统一的精彩华章。 第二条公司概况 徐州工程机械集团有限公司(以下简称公司)成立于一九八九年三月,成立22年来始终保持中国工程机械行业排头兵的地位,2010年实现营业收入660亿元,目前位居世界工程机械行业前10强,中国500强企业第125位,中国制造业500强第55位,是中国规模最大、最具竞争力和影响力的工程机械产品研发、制造和销售的大型企业集团。 公司以起重机械、土石方机械、筑路机械和混凝土机械等工程机械为主导产业,大力发展重型卡车和专用车、核心零部件,推进国际化发展战略,在“十二五”期间全力冲击世界工程机械行业前三强,致力于成为极具国际竞争力、让国人为之骄傲的世界顶级企业。 第三条公司文化理念
核心价值观:担大任、行大道、成大器。 企业愿景:成为全球着名的、极具国际竞争力、让国人为之骄傲的世界顶级企业。 企业精神:严格、踏实、上进、创新。 企业宗旨:满足超值需求,效力社会进步。 员工准则:忠诚信用,敬业守纪,团结协作,精准高效。 ? 第二章? 员工行为规范 ? 第四条职业道德规范 1. 员工应自觉遵守国家法律、法规,严格执行公司的各项规章制度,强化遵纪守法意识,加强道德约束。 2. 员工应忠诚信用,忠于企业,忠于岗位,以诚相待,信守承诺,恪守职责。 3. 员工不得利用职务或工作之便,谋取个人私利或损害公司利益,不得贪污腐败、损公肥私、见利忘义,不得对相关方进行误导。 4. 工作中应坚持原则、严于自律、勇于负责、忠于职守、讲究效率,努力做好本职工作,以高度的责任感对待岗位职责。 第五条基本行为规范 1. 员工应自觉维护公司利益与形象,爱护公司财产与环境,自觉遵守公共道德。
传动比计算
126 §5-6 定轴轮系传动比的计算 一、轮系的基本概念 ● 轮系:由一系列相互啮合的齿轮组成的传动系统; ● 轮系的分类: 定轴轮系: 所有齿轮轴线的位置固定不动; 周 转轮系:至少有一个齿轮的轴线不固定; ● 定轴轮系的分类: 平面定轴轮系:轴线平行; 空间定轴轮系:不一定平行; ● 轮系的传动比: 轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。 传动比的大小:当首轮用“1”、末轮用“k ”表示时,其传动比的大小为: i 1k = ω1/ωk =n 1/n k 传动比的方向:首末两轮的转向关系。 相互啮合的两个齿轮的转向关系: 二、平面定轴轮系传动比的计算 特点: ●轮系由圆柱齿轮组成,轴线互相平行; ●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。 1、传动比大小 设Ⅰ为输入轴,Ⅴ为输出轴; 各轮的齿数用Z 来表示;
127 角速度用ω表示; 首先计算各对齿轮的传动比: 所以: 结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向 在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。 (1)公式法 式中:m 为外啮合圆柱齿轮的对数 举例: (2)箭头标注法 采用直接在图中标注箭头的方法来确定首末两轮的转向,转向相同为“+”,相反为“-”。 举例: 12 2112z z i ==ωω322233 3 2z i z ωωωω''' = = = 334 34443z i z ωωωω' '' ===4 55 445z z i = = ωω1 1211) 1(--== k k m k k z z z z i ω ω
第13章 机械传动系统的设计
第十三章一般机械传动系统设计 现代机器由原动机部分、传动部分、执行部分三个基本部分组成。原动机部分是驱动整部机器以完成预定功能的动力源。通常,一部机器只用一个原动机,复杂的机器也可能有几个动力源。它们都是把其它形式的能量转换为可以利用的机械能。现代机器中使用的原动机多是以各式各样的电动机和热力机为主。执行部分是用来完成机器预定功能的组成部分。一部机器可以只有一个执行部分,也可以把机器的功能分解成好几个执行部分。传动部分由图13-1可知,是把原动机的运动形式、运动及动力参数转变为执行部分所需要的运动形式、运动及动力参数的中间传动装置。机器的传动部分多数使用机械传动系统。它是绝大多数机器不可缺少的重要组成部分,其质量和成本在整台机器的质量和成本中占有很大的比例。机器的工作性能在很大程度上取决于传动装置的优劣。因此,本章仅对机械传动系统的设计作一个简单的介绍。 →→???→传动机构传动机构 传动机构→ 图13-1 单路传动 §13.1机械传动方案的设计 传动系统方案设计是在完成了执行系统的方案设计和原动机的选型后进行的。机械传动系统除了进行运动和动力传递外,还可实现增速、减速或变速传动;变换运动形式;进行运动的合成和分解;实现分路传动和较远距离传动等。满足原动机和工作机性能要求的传动方案,是由不同的组合方式和布置顺序构成的。 13.1.1传动类型的选择 传动机构的类型很多,选择不同类型的传动机构,将会得到不同形式的传动系统方案。为了获得理想的传动方案,需要合理选择传动机构类型。常用传动机构及其性能见表13-l。 表13-1 常用传动机构及其性能
选择传动类型时,应根据主要性能指标:效率高、外廓尺寸小、质量小、运动性能良好、成本低以及符合生产条件等。选择传动类型的基本原则是: ①当原动机的功率、转速或运动形式完全符合执行系统的工况要求时,可将原动机的输出轴与执行机构的输入轴用联轴器直接联接。这种联接结构最简单,传动效率最高。但当原动机的输出轴与执行机构的输入轴不在同一轴线上时,就需要采用等传动比的传动机构。 ②原动机的输出功率满足执行机构要求,但输出的转速、转矩或运动形式不符合执行机构的需要,此时则需要采用能变速或转换运动形式的传动机构。 ③高速、大功率传动时,应选用承载能力大、传动平稳、效率高的传动类型。 ④速度较低,中、小功率传动,要求传动比较大时,可选用单级蜗杆传动、多级齿轮传动、带——齿轮传动、带——齿轮——链传动等多种方案,进行分析比较,选出综合性能较好的方案。 ⑤工作环境恶劣、粉尘较多时,尽量采用闭式传动,以延长零件的寿命。 ⑥尽可能采用结构简单的单级动装置。中心距较大时,可采用带传动、链传动。传动比较大时,优先选用结构紧凑的蜗杆传动和行星齿轮传动。 ⑦当执行机构的载荷频繁变化、变化量大且有可能过载时,为保证安全运转,可选用有过载保护的传动类型。 ⑧单件、小批量生产的传动,尽量采用标准的传动装置以降低成本,缩短制造周期。 13.1.2传动方案的设计 相同的传动机构按不同的传动路线及不同的顺序布置,就会产生出不同效果的传动方案。只有合理的安排传动路线,恰当布置传动机构,才能使整个传动系统获得理想的性能。 1.传动路线的选择
机械传动系统性能综合测试与分析
机械综合设计与创新实验 (实验项目三) 机械传动系统性能综合测试与分析 班级: 姓名: 学号: 指导教师: 时间:
实验三 机械传动系统性能综合测试与分析 一、实验目的 1、 了解、掌握综合机械系统的基本特性及实验测试原理与方法。 2、 掌握ZJS50系列综合设计型机械装置在现代实验测试研究中的应用。 3、 根据给定的实验项目内容、设备,提高学生的工程实践能力、科学实验能力、创新 能力、动手能力及团队合作能力。 4、 根据实验项目要求,通过实验测试与分析、定量评价,比较机械传动方案的优劣。 二、实验原理 机械传动效率是评价机械传动装置综合性能的重要指标。我们指导,机械传动系统输入功率等于输出功率与内部损耗功率之和,即 P i =P 0+P f 式中:P i 为输入功率,P 0为输出功率,P f 为损失功率。则机械效率η为 η= P 0/P i 根据力学知识,若机械传动的力矩为M ,转速为n ,则对应功率有如下关系 P = Mn 9550 式中:n 为传动机械的转速。 故传动效率也可以表示为 η = M 0n 0M i n i 因此,我们只需要利用仪器测出被测传动的输入输出转矩和转速即可计算出传动效率。 机械传动性能综合测试实验台的工作原理如下图所示。通过对转矩和转速的测量,利用转矩、转速与功率的数学关系间接导出功率数值,并通过对电机和负载的相应控制观察分析转速、转矩、功率的相应变化趋势,同时通过对减速器的输入功率和输出功率的测量分析,得出减速器的效率及其随不同情况的变化所呈现的变化趋势。 实验台工作原理图 被测传动 转矩转速 传感器 电机 转矩转速传感器 制动器 工控机
中考物理 综合计算题 第1讲 力学计算 有关机械效率的
题型之三 有关机械效率的综合题 功与能内容包罗万象,计算公式繁多.形式往往把滑轮、功与功率、机械效率综合起来,要求我们把握知识间的内在联系,正确应用相应公式进行计算. (2014·聊城)一辆重2×104 N 的四轮卡车,开进了一段泥泞的道路,不能继续行驶,司机找来一小型拖拉机绳子、动滑轮,采用如图所示装置,拖拉机在绳端用3 750 N 的水平拉力,将汽车以0.2 m/s 的速度水 平匀速拉出泥泞路段,用时10 s.若每一个车轮与地面接触面积为0.05 m 2. (1)求汽车对路面的压强; (2)求拉力F 做的功和功率; (3)若动滑轮的机械效率为80%,求汽车所受的阻力. 点拨:(1)卡车对地面的压力等于其自身重力,利用压强公式S F p = 可求得汽车对路面的压强;(2)利用速度公式变形s=vt 求出汽车前进的距离,根据动滑轮特点求出绳子移动的距离,再利用功的计算公式W=Fs 和t W P =求出拉力做的功和功率;(3)根据机械效率求得有用功,再利用W=Fs 变形求得牵引力,汽车匀速前进,牵引力等于车所受的阻力. 1.(2014·孝感)如图甲所示,滑轮组在竖直向上的拉力F 作用下,将重为105 N 的物 体匀速提起,在5 s 时间内绳子自由端移动的距离为s=3 m.图乙是滑轮组工作时的拉力 F 与绳自由端移动 距离s 的关系图. (1)计算物体上升的速度.
(2)图乙中阴影部分的面积表示的物理量是_________,并列式计算出该物理量. (3)计算滑轮组提升该重物时的机械效率. 2.(2014·哈尔滨)如图所示,小机车通过滑轮组提升重物,机车的最大输出功率为10 kW 重物重3 500 N,动滑轮重500 N.机车所受摩擦阻力不计,绳重及滑轮转动时摩擦忽略不计. (1)滑轮组的机械效率是多少? (2)若要求重物以1 m/s匀速提升,则机车能提升重物的最大重量为多少? 3.(2014·昆明)用如图所示的滑轮,使一个铁块以0.2 m/s的速度匀速上升了1 m,已 知铁块的体积为10-3 m3,求:
徐工集团QUY产品简介
QUY1000履带起重机 产品简介 徐工集团工程机械股份有限公司二O一O年五月
参与国际竞争而研制开发的超大吨位高端起重机产品。该机综合吸收国内外先进技术,运用先进的设计手段,结构设计优化,起重性能卓越。该机采用履带式底盘、多组合桁架式吊臂,具有接地比压小、可带载行驶、起升高度大、起重性能高等优点,塔式副臂可紧靠建筑物施工,可变超起配重半径的超起装置可提供超强的起重性能和机动灵活性。程序控制系统,保证起重机安全工作。闭式泵控变量液压系统,电比例操作,节能高效,控制精确。国际著名企业的电控、动力、传动元件,环保可靠。 1. 超起装置可提供超强的起重性能,超起配重半径可变提高了场地适应性。 2. 电比例操作系统,程序集成控制,充分体现以人为本的设计思想,实现了起重机的自动控制,大大提高起重机作业安全性、可靠性和作业效率。防水防尘措施的采用,保证了对恶劣工作环境的适应能力。 3. 液压系统为闭式泵控变量系统,与电比例操作系统紧密结合,大大提高起重机的控制性能,节能高效。微动性能好,动作平稳可靠。在液压系统特征点设置测压接头,方便系统运行状态监控和故障诊断。 4. 齐全的安全装置,彩色大屏幕实时监控发动机、作业状态及风速,确保起重机安全工作。 5. 桁架式吊臂,德国进口管材,重量轻,承载能力高。吊臂组合多,适用范围广。臂端单滑轮机构,可实现轻载的快速吊装,提高工作效率。 6. 美国康明斯发动机,德国高质量的液压、电气、传动元件和不旋转钢丝绳,确保了作业可靠性和环保性能。 7. 宽敞的操纵室,可调式座椅,配置冷暖空调和音响,环境舒适。工作时,操纵室可调整俯仰角度,扩大视野;运输时,操纵室可从侧方转到前方,减小运输宽度。 8. 穿绳技术、动力销技术、集中润滑系统、作业状态监视系统,减轻了劳动强度,体现了人性化。 9. 重型主臂、塔式副臂可套装运输,以减少运输车辆。除下部主机的运输宽度为3.538m 之外,其余部件的运输宽度均小于3.5m。
效率实验报告
机械传动性能综合实验报告 姓名: 学号: 班级: 任课老师:
(特别提示:本报告第一、二、三部分来自试验指导书,稍有更改。) 一、实验目的 1.了解机械传动系统效率测试的工程试验手段和常用的机械效率测试设备, 掌握典型机械传动系统的效率范围,分析传动系统效率损失的原因; 2.通过对典型机械传动系统及其组合的性能测试,加深对机械传动系统性能 的认识以及对机械传动合理布置的基本原则的理解; 3.通过对实验方案的设计、组装和性能测试等训练环节,掌握计算机辅助实 验测试方法, 培养学生创新设计与实践能力。 二、实验原理及设备 1、实验原理: 机械传动性能综合测试实验台的工作原理如图1所示。通过对转矩和转速的测量,利用转矩、转速与功率的数学关系间接导出功率数值,并通过对电机和负载的相应控制观察分析转速、转矩、功率的相应变化趋势,同时通过对减速器的输入功率和输出功率的测量分析,得出减速器的效率及其随不同情况的变化所呈现的变化趋势。 2、实验设备: 机械传动性能综合测试实验台采用模块化结构,由不同种类的机械传动装置、联轴器、变频电机、加载装置和工控机等模块组成,学生可以根据选择或设计的实验类型、方案和内容,自己动手进行传动连接、安装调试和测试,进行设计性实验、综合性实验或创新性实验。机械传动性能综合测试实验台各硬件组成部件的结构布局如图2所示。 图2(a) 实验台外观图
1-变频调速电机 2-联轴器 3-转矩转速传感器 4-试件 5-加载与制动装置 6-工控机 7-电器控制柜 8-台座实验设备包括机械传动综合效率实验台(包括台座、变频调速器、机柜、电控箱)、蜗轮蜗杆减速器、齿轮减速器、三相异步电动机、同步带传动装置、滚子链传动装置、V带传动装置、磁粉制动器、ZJ转矩转速传感器、计算机及打印机、其他零配件。典型实验装置包括齿轮减速传动装置、蜗轮蜗杆减速传动装置、V带+齿轮减速传动装置、齿轮减速+滚子链传动装置、同步带减速传动装置、V带减速传动装置、V带+同步带减速传动装置。实验装置由动力部分、测试部分、加载部分和被测部分等组成。各部分的性能参数如下: 1、动力部分 1)YP-50-0.55三相感应变频电机:额定功率0.55KW;同步转速 1500r/min;输入电压380V。 2)LS600-4001变频器:输入规格 AC 3PH 380-460V 50/60HZ;输出规格 AC 0-240V 1.7KVA 4.5A;变频范围 2~200 HZ。 2、测试部分 1)ZJ10型转矩转速传感器:额定转矩 10N.m;转速范围 0~6000r/min; 2)ZJ50型转矩转速传感器:额定转矩 50N.m;转速范围 0~5000r/min; 3)TC-1转矩转速测试卡:扭矩测试精度±0.2%FS;转速测量精度± 0.1%; 4)PC-400数据采集控制卡。 3、被测部分 1)三角带传动: 带轮基准直径 D1=70mm D2=115mm O型带L内=900mm; 带轮基准直径 D1=76mm D2=145mm O型带L内=900mm; 带轮基准直径 D1=70mm D2=88mm O型带L内=630mm。 2)链传动:链轮 Z1=17 Z2=25 滚子链 08A-1×71 滚子链 08A-1×53 滚子链 08A-1×66。
徐工集团员工手册
某工程机械集团某 员工手册 目录 第一章总则 第二章员工行为规X 第三章劳动关系 第四章入职及入职培训 第五章作息与休假制度 第六章薪酬政策 第七章保险、福利和劳动防护 第八章培训与发展 第九章违纪处理 第十章奖励 第十一章其他规定 第十二章附则
第一章总则 第一条引言 徐工全体员工均应熟悉和遵守本手册。 本手册可以帮助你了解公司的概况、文化理念、需要遵守的规章制度、享有的基本权利和应尽的基本义务等多方面的内容,如对手册所述的方针政策和规章制度有任何疑问,请与部门负责人或所在单位人力资源部门联系。 衷心祝愿你工作愉快,并期待你用智慧、爱心和汗水谱写出公司发展和个人成长高度和谐统一的精彩华章。 第二条公司概况 某工程机械集团某(以下简称公司)成立于一九八九年三月,成立22年来始终保持中国工程机械行业排头兵的地位,2010年实现营业收入660亿元,目前位居世界工程机械行业前10强,中国500强企业第125位,中国制造业500强第55位,是中国规模最大、最具竞争力和影响力的工程机械产品研发、制造和销售的大型企业集团。 公司以起重机械、土石方机械、筑路机械和混凝土机械等工程机械为主导产业,大力发展重型卡车和专用车、核心零部件,推进国际化发展战略,在“十二五”期间全力冲击世界工程机械行业前三强,致力于成为极具国际竞争力、让国人为之骄傲的世界顶级企业。 第三条公司文化理念
核心价值观:担大任、行大道、成大器。 企业愿景:成为全球著名的、极具国际竞争力、让国人为之骄傲的世界顶级企业。 企业精神:严格、踏实、上进、创新。 企业宗旨:满足超值需求,效力社会进步。 员工准则:忠诚信用,敬业守纪,团结协作,精准高效。 第二章员工行为规X 第四条职业道德规X 1. 员工应自觉遵守国家法律、法规,严格执行公司的各项规章制度,强化遵纪守法意识,加强道德约束。 2. 员工应忠诚信用,忠于企业,忠于岗位,以诚相待,信守承诺,恪守职责。 3. 员工不得利用职务或工作之便,谋取个人私利或损害公司利益,不得贪污腐败、损公肥私、见利忘义,不得对相关方进行误导。 4. 工作中应坚持原则、严于自律、勇于负责、忠于职守、讲究效率,努力做好本职工作,以高度的责任感对待岗位职责。 第五条基本行为规X 1. 员工应自觉维护公司利益与形象,爱护公司财产与环境,自觉遵守公共道德。
齿轮传动比计算汇总
在图示的轮系中。已知z1=20, z2 =40, z2’ =20, z3 =30, z3’ =20, z4=40,求轮系的速比i14,并确定轴O 1和轴O 4的转向是相同还是相反? 6202020403040'3'214324114=????===z z z z z z n n i 在图示的轮系中,z1=16,z2=32, z3= 20, z4= 40, z5= 2(右旋蜗杆), z6= 40,若n1=800 r /min ,求蜗轮的转速n6并确定各轮的转向。 80220164040325316426116=????===z z z z z z n n i min /10808001616r i n n === 顺时针方向 如图轮系中,已知各轮齿数z1=28,z2=18,z2’=24,z3=70。求传动比i1H 。 '21321313113 )1(z z z z n n n n n n i H H H H H -=--== 202020403040'3'2143241????===z z z z z z n n 202020403040'3'2143241=????===z z z z z z n n 2 201640403253164261????===z z z z z z n n 875.124 28701801-=??-=--H H n n n
875.2875.1111=+==H H n n i 已知轮系中各轮齿数为z1=48,z2=48,z2’=18,z3=24,n1=250r/min ,n3= 100r/min ,转向如图中实线箭头所示。试求系杆的转速nH 的大小及方向。 解:划箭头得,转化轮系中齿轮1、3的转向相反。 18 482428100250??-=---H H n n 在图示轮系中,已知Z1=17,Z2=20,Z3=85,Z4=18,Z5=24,Z6=21,Z7=63,求: (1)当n1=10001r/min ,n4=10000r/min 时,np=? (2)当n1=n4时,np=? (3)当n1=10000r/min ,n4=10001r/min 时,np=? 解:nP=n7 421 186324)1(6475174-=??-=-=--z z z z n n n n H H 517 8512132231==-=z z z z n n )( H n n n ==132.0 (1)np=0.25 (2)np=0 (3)np= -0.25 在图示轮系中,各轮齿数Z1=32,Z2=34,Z2'=36,Z3=64,Z4=32,Z5=17,Z6=24,轴Ⅰ按图示方向以1250r /min 的转速回转,而轴VI 按图示方向以600r/min 的转速回转。试求 875.111-=+- H n n '2132 31z z z z n n n n H H -=--517 8512132231==-=z z z z n n )(
工程机械总复习题 - 副本
工程机械总复习题 一、填空题 1、推土机主要用来(开挖路堑)、(构筑路堤)、(回填基坑)、(铲除障碍)、(清除积雪)、(平整场地)等。 2、推土机可按(功率等级)、(行走装置)、(推土铲安装形式)、(传动方式)、(用途)等进行分类。 3、按推土机装备的发动机功率等级不同可分为(超小型)、(小型)、(中型)、(大型)和(特大型)五类。 4、按行走装置不同,推土机可分为(履带式)和(轮胎式)两种类型。 5、按推土铲安装方式不同,推土机可分为(固定式)和(回转式)两种类型。 6、按传动方式不同,推土机可分为(机械式传动)、(液力机械式传动)、(静液压传动)和(电传动)四种类型。 7、按用途分,推土机可分为(标准型)和(专用型)。 8、推土机作业过程可分为(铲土作业)、(运土作业)、(卸土作业)和(空驶回程)四个过程。 9、履带式推土机行走装置由(驱动链轮)、(支重轮)、(托轮)、(引导轮/张紧轮)、(履带)、(台车架)、(张紧装置)等组成。 10、推土机由发动机、(传动系统)、(行走系统)、(工作装置)、操纵控制系统等几部分组成。 11、推土机的机械传动系统由主离合器、联轴器、(变速器)、(中央传动装置)、(转向离合器)、(制动器)和终传动机构组成。 12、推土机常用的传动方式有(机械)传动、(液力机械)传动、(静夜压)传动。 13、液力机械传动由液力变矩器、动力换挡变速器、(中央传动装置)、(转向离合器)、(制动器)和终传动机构组成。 14、液力机械式传动系统与机械传动系统的区别在于前者用(液力变矩器)和(动力换挡变速器)取代了主离合器和机械式换挡变速器,可不停机换挡。 15、推土机液压传动系统由(双向变量液压泵)、(变量液压马达)和终传动机构组成。 16、采用机械传动和液力机械传动的推土机,通常采用(转向离合器)加(转向制动器)实现转向与制动。 17、采用液压传动方式的推土机,无需(转向器)和(行车制动器),只要控制每一侧液压马达的输出转速或旋转方向,就可实现转向和原地转向。 18、推土机的行走系统包括(机架)、(悬架)和(行走装置)。 19、推土机的工作装置包括(推土装置)和(松土器)。 20、推土机的推土铲由(推土板)和(推架)两部分组成。 21、采用固定式铲刀的推土机,其铲刀正对前进方向安装,成为(直铲)或(正铲)。 22、通常,向前推挖土石方、平整场地或堆积松散物料时,广泛采用(正铲)作业;傍山铲土或单侧弃土,常采用(斜铲)作业:在斜坡上铲削硬土或挖边沟,采用侧铲作业。 23、推土板主要由(曲面面板)和(可卸式切削刃)组成。 24、推土板的外形结构参数主要有(宽度)、(高度)和(积土面曲率半径)。 25、推土板的积土面形状常采用在(抛物线)或(渐开线)曲面。 26、推土板的外形结构常用的有(直线形)和(U形)两种。 27、推土板断面结构有(开式)、(半开式)和(闭式)三种形式。 28、松土器结构分为铰链式、(平行四边形)式、(可调式平行四边形)式和径向可调式四种基本形式。 29、松土器按松土齿的数量可分为(单齿)式和(多齿)式松土器。 30、松土齿由齿杆、(护套板)、(尖齿镶块)及固定销组成。 31、松土齿的齿杆形状有(曲齿形)、(直尺形)和折齿形三种基本结构。