精密机械设计
精密机械设计基础零件的精度设计与互换性
孔的公差带在轴的公差带相交 形成过渡配合
H/h的配合
公孔 差的 过带公 盈之差 配下带 合,在 形轴 成的
基准轴与各种基本偏差的孔相互配合——基轴制
上偏差es=0
ei=IT(标准公差) 精密机械设计基础零件的精度设计与 互换性
-25
基本偏差代号为js, 所有公差等级和基本 尺寸,其基本偏差为
上偏差或下偏差, 数值均为
对于间隙
最 小 间 隙
Tf= Xmax- Xmin
Tf= Th+ Ts
最
孔
大
间 隙
轴
对于过盈
最 小 间 隙
Tf= Ymin- Ymax
轴
最
大
间 隙
孔
精密机械设计基础零件的精度设计与
互换性
对于过渡 Tf= Xmax- Ymax
Ymax
Xmax
Ymax
Xmax
Ymax
Xmax
精密机械设计基础零件的精度设计与 互换性
S7
U7
孔孔的的常优用先公公差差带带((4143种种))
孔的一般公差带(精1密0机5械种设计)基础零件的精度设计与
互换性
间隙配合
过
过盈配合
渡
配
合
基孔制优先、常用配合
精密机械设计基础零件的精度设计与 互换性
间 隙 配 合
过渡配合
过盈配合
精密机械设计基础零件的精度设计与 互换性
例 Φ50H8/f7
4.根据轴的上、下偏差画 出轴的公差带
公差带组成:公差带大小+公差带位置
(由标准公差确定)(由基本偏差确定)
精密机械设计基础零件的精度设计与 互换性
二、标准公差、基本偏差系列及其应用
精密机械设计基础复习题
精密机械设计基础复习题精密机械设计基础复习题⼀、判断题1、具有⼀个⾃由度的运动副称为Ι级副。
()2、平⾯⾼副连接的两个构件间,只允许有相对滑动。
()3、在平⾯机构中⼀个⾼副引⼊两个约束。
()4、任何机构的从动件系统的⾃由度都等于零。
()5、平⾯机构具有确定运动的条件是机构的⾃由度数等于1。
()6、⽆急回运动的曲柄摇杆机构,极位夹⾓等于00,⾏程速⽐系数等于 1。
()7、平⾯连杆机构中,同⼀位置的传动⾓与压⼒⾓相等。
()8、平⾯⾼副连接的两个构件间,只允许有相对滑动。
()9、⾏星轮系是机构⾃由度等于 1 的周转轮系。
()10、平⾏四边形机构没有曲柄。
()11、⼀对外啮合齿轮传动的中⼼距,等于两齿轮的分度圆半径之和。
()12、渐开线在任⼀点的法线总是切于基圆。
()13、曲柄摇杆机构中,以曲柄为主动件时,最⼩传动⾓出现在曲柄与连杆两次共线的位置之⼀处。
14、增⼤模数,可以增加齿轮传动的重合度。
15、仿形法加⼯齿轮时,因为不需要专⽤的机床,所以适于⼤批量⽣产。
16、当压⼒⾓为900时,机构将处于⾃锁状态,所以应该避免⾃锁现象。
()()()()⼆、填空题1、平⾯机构具有确定运动的条件是机构的⾃由度数等于。
2、连杆是不直接和相联的构件;连杆机构中的运动副均为3、⽆急回运动的曲柄摇杆机构,极位夹⾓等于,⾏程速⽐系数等于。
4、平⾯连杆机构中,同⼀位置的传动⾓与压⼒⾓之和等于。
5、平⾏轴外啮合斜齿圆柱齿轮的正确啮合条件是、、。
6、⼀对外啮合齿轮传动的中⼼距,等于两齿轮的圆半径之和。
7、⾏星轮系是机构⾃由度等于的周转轮系。
8、平⾏四边形机构有个曲柄。
9、⼀个曲柄摇杆机构,极位夹⾓等于36o,则⾏程速⽐系数等于。
10、为减⼩凸轮机构的压⼒⾓,应该凸轮的基圆半径。
11、凸轮推杆按等加速等减速规律运动时,在运动阶段的前半程作运动,后半程作运动。
12、增⼤模数,齿轮传动的重合度;增多齿数,齿轮传动的重合度。
13、平⾏轴齿轮传动中,外啮合的两齿轮转向相,内啮合的两齿轮转向相。
精密机械设计(裘祖荣) 第七章答案 齿轮传动
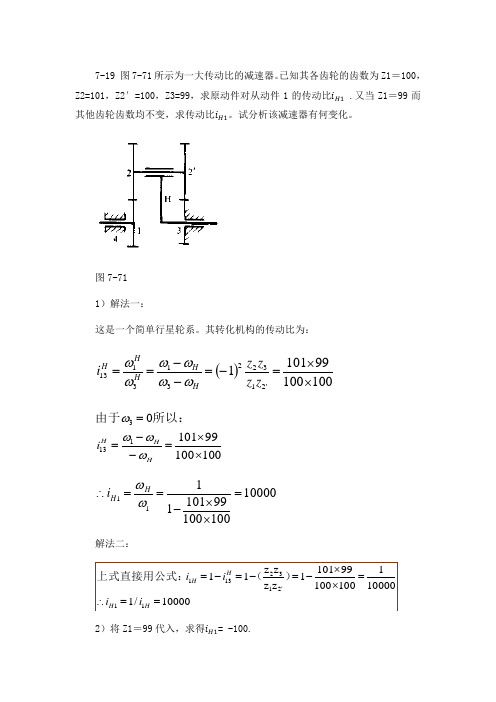
7-19 图7-71所示为一大传动比的减速器。
已知其各齿轮的齿数为Z1=100,Z2=101,Z2′=100,Z3=99,求原动件对从动件1的传动比i H1 .又当Z1=99而其他齿轮齿数均不变,求传动比i H1。
试分析该减速器有何变化。
图7-71 1)解法一:这是一个简单行星轮系。
其转化机构的传动比为:()100100991011'21322313113⨯⨯=-=--==z z z z i H H H HH ωωωωωω1001009910101133⨯⨯=--==H H Hi ωωωω所以:由于10000100100991011111=⨯⨯-==∴ωωH H i解法二:10000/1100001100100991011zz z z 11112132131==∴=⨯⨯-=-=-='H H HH i i i i )(上式直接用公式:2)将Z1=99代入,求得i H1= -100.3)齿轮1的转向从与原动件H 相同变为与原动件H 相反。
7-20 在图7-72示双螺旋桨飞机的减速器中,已知18,30,20,265421====z z z z ,及1n =15000r/min ,试求Q P n n 和的大小和方向。
(提示:先根据同心,求得3z 和6z 后再求解。
)图7-72解:由图可知n 3=n 6=0 根据同心条件:66202262213=⨯+=+=z z z 64253021866z z z =+=+⨯=1)1-2-3-P(H)组成行星轮系 i 13P=n 1−n p n 3−n p=15000−n p 0−n p=−z 3z 1=−6626解得n p =4239.5r/min (与n 1同向) n 4=n p =4239.5r/min 2)4-5-6-Q(H)组成行星轮系 i 46Q=n 4−n Q n 6−n Q=4239.5−n Q−n Q=−z 6z 4=−6630解得min /737.1324r n Q =(与n 1同向).7-21 在图7-73所示输送带的行星减速器中,已知:z 1=10, z 2=32, z 3=74, z 4=72, z 2,=30 及电动机的转速为1450r/min ,求输出轴的转速n 4。
青大精密机械设计教学大纲

青大精密机械设计教学大纲05010092《精密机械设计》教学大纲学分4学时:(60+8)一、课程性质和目标本课程是为仪器仪表类及相近专业的本科学生开设的学科基础课,学时为68学时。
作为专业骨干课程,本课程是在具备机械制图、工程力学知识的基础上展开的。
它融合机械原理,机械零件,工程材料与热处理,零件的精度设计于一门课程,对精密机械及仪器仪表中常用机构和零部件的工作原理,适用范围,结构设计,理论计算方法,工程材料以及零件几何精度的基础知识等诸方面进行阐述,是该专业本科学习期间的一门综合性机械类课程。
在课程科学知识体系上,充分考虑仪器仪表类专业精密机械设计的特点,削减了对仪器仪表专业应用性较弱的知识点,贯彻落实“少而精,教给手”的教育理念,著重培育学生的结构设计能力,工程化和标准化设计能力。
充分利用一流设计手段,强化课堂教学环节,注重精密机械设计特点,特别强调设计方法和设计者素质的培育。
通过本课程的自学:1)使学生基本掌握精密仪器仪表中通用机构的结构分析、运动分析、动力分析及其设计方法;2)并使学生掌控通用型零、部件的工作原理、特点、选型及其计算方法,培育学生能够运用所学基础理论科学知识,化解精密机械零、部件的设计问题;3)培养学生具有设计精密机械传动和仪器机械结构的能力,以及对某些典型零、部件的精度分析,并提出改进措施;4)并使学生介绍常用机构和零、部件的试验方法;初步具备某些零、部件的性能测试和结构分析能力;5)使学生了解零件的材料与热处理方法、精度设计和互换性方面的基本知识,并能在工程设计中如何正确选用。
二、课程基本建议本门课是一门实践性很强的技术基础课。
主要由课堂教学,实验教学和集中课程设计。
在课堂教学中主要通过教师讲授与应用多媒体课件结合,采用启发式,问答式等方法进行教学。
实验教学为学生提供实验指导,由院实验中心组织任课老师和实验员负责实验的准备和实施,通过形式生动的实验教学,培养学生的感性认识。
《精密机械设计基础(第二版)》裘祖荣习题参考答案

第一章 结构设计中的静力学平衡1-1 解:力和力偶不能合成;力偶也不可以用力来平衡。
1-2 解:平面汇交力系可以列出两个方程,解出两个未知数。
取坐标系如图,如图知 ()100q x x = 1-3 解:则载荷q(x) 对A 点的矩为1()()(2)66.7()A M q q x x dx KN m =⋅-≈⋅⎰1-4 解:1)AB 杆是二力杆,其受力方向如图,且 F A ’=F B ’2)OA 杆在A 点受力F A ,和F A ’是一对作用力和反作用力。
显然OA 杆在O 点受力F O ,F O 和F A 构成一力偶与m 1平衡,所以有 1sin300A F OA m ⋅⋅︒-=代入OA = 400mm ,m 1 = 1N ⋅m ,得 F A =5N 所以F A ’=F A =5N , F B ’= F A ’=5N ,即 杆AB 所受的力S =F A ’=5N3)同理,O 1B 杆在B 点受力F B ,和F B ’是一对作用力和反作用力,F B =F B ’=5N ;且在O 1点受力F O1,F O1和F B 构成一力偶与m 2平衡,所以有 210B m F O B -⋅= 代入O 1B =600mm ,得 m 2=3N.m 。
1-5 解:1)首先取球为受力分析对象,受重力P ,墙 壁对球的正压力N 2和杆AB 对球的正压力N 1,处于平衡。
有:1sin N P α⋅= 则 1/s i n N P α=2)取杆AB 进行受力分析,受力如图所示, 杆AB 平衡,则对A 点的合力矩为0: 1()cos 0A M F T l N AD α=⋅⋅-⋅=3)根据几何关系有(1cos )sin tan sin a a a AD αααα+=+=最后解得:2211/cos 1sin cos cos Pa Pa T l l αααα+=⋅=⋅- 当2cos cosαα-最大,即α=60°时,有T min =4Pa/l 。
精密机械设计基础习题

解: F=3n-2PL-PH n=13,Pl=18,PH=2 F=1=原动件数 机构的确定运动。
例1:如图所示为摆动从动件盘形凸轮机构,凸轮为一偏心圆盘,其半径 r=30mm,偏距e=10mm,LAB=90mm,LBC=30mm,ω1=20rad/s。 求:
(1)找出机构的所有瞬心;(2)求图示位置的vC。
解: F=3n-2PL-PH n=8,Pl=11,PH=1 F=1
在D、E处存在复合 铰链;滚子绕自身 几何中心B的转动自 由度为局部自由度; FG杆及其两端的转 动副所引入的约束 为虚约束。
自由度计算实例:
B
A
C
G D
F
I
E
H J
习题2:如图,已知AD∥BE∥CF,并且AD=BE=CF;LN=MN=NO,构件1、 2为齿轮,且齿轮2与凸轮固连。试计算机构自由度(若有复合铰链、局部自 由度和虚约束,请指出)。机构有无确定运动?为什么?
4、机械效率用功表示为(=Wr/Wd );用驱动力表示为(= 理想驱动力/ 实 际驱动力 )。
5、串联机组的效率等于(机组每台机器效率的连 乘积 )。串联机器的数目越多, 机械效率越( 低 )。
6、当驱动力任意增大恒有( 0
)时,机械将发生自锁。
7、机械在运动过程中的三个阶段:(起动)阶段、(稳定运转)阶段和(停车)阶
6、整转副存在的条件?曲柄存在的条件?双摇杆机构中有无整转副?
7、在摆动导杆机构中,行程速度变化系数K与导杆摆角ψ的关系是 ( K=(180º+ ψ )/(180º- ψ ))。 8、曲柄摇杆机构中,当摇杆为原动件,曲柄为从动件, 且(曲柄与连杆 ) 共线时,机构处于死点位置。 9、对心曲柄滑块机构中,以曲柄为原动件时,传动角在( 曲柄和导路垂 直时)最小;在(曲柄和机架共线时)最大。 10、一曲柄摇杆机构,当行程速比系数K( ﹥1 )时该机构有急回特性。 11、设计连杆机构时,为了具有良好的传动条件,应使(传动)角大些。 12、曲柄摇杆机构处于死点位置时,其传动角为(0),压力角为 (90º )。 13、曲柄摇杆机构中,当曲柄为原动件时,最小传动角γmin发生在(曲 柄和机架共线的位置之一 )的情况下。
精密机械设计课件:可变光阑 -
10.1 光闌的作用和設計要求
攝影鏡頭中是通過特設的通光孔徑來控制成像光束 的大小,控制軸上點及軸外點光束大小的通光孔徑叫 做孔徑光圈或有效光闌,即光圈。
1.作用 (1)改善攝影鏡頭的成像品質 (2)控制攝影鏡頭的光功率、聚光本領和景深等 (3)攔截攝影鏡頭系統中的雜散光等 (4)改變光圈的大小還可以得到不同的景深
10.2 虹彩光闌
最常見的一種圓孔可變光闌,其各 級光孔所對應的光圈刻度一般是不等間 隔的。
基本結構組成:活動環、固定環 和光闌片。
Байду номын сангаас
10.2 虹彩光闌
設計時的已知參數有:
1)對應各檔光圈數的光闌孔徑2 i,包括最大光孔直徑2 max
和最小光孔直徑2 m ; in 2)限制光闌機構外形尺寸的有關結構參數,如安裝光闌機 構處的允許最大徑向尺寸與最大軸向尺寸等。
孔徑,按照刻制的數字(F數)裝定所需要的光圈大小。
可變光闌機構的結構類型不多 按光孔的形狀分:光孔接近圓形的方孔
可變光闌(圖10.1) 圓孔可變光闌(圖10.2)
若按光圈刻度間隔分:等間隔光闌 不等間隔光闌兩種。
10.1 光闌的作用和設計要求
設計方法:
(1)計算法 (2)圖解法
在許多場合,用圖解法比計算法迅速、簡便,尤其用 圖解法設計等間隔光闌的導槽形狀時,更顯得直觀和方便。
10.2.1、計算法
按銷釘位置分三種情況: 1.銷釘位置在光闌片的中心線上
2. 活動銷釘向外偏離中心線
3. 固定銷釘向內偏移、活動銷釘向外偏移
10.2 虹彩光闌
10.2.2、圖解法
1.求光闌片的形廓參數 2. 求光闌片數目
3. 求活動環轉角
設計光闌應該求出:
精密机械学基础课程设计
精密机械学基础课程设计1. 引言精密机械学是一门研究微观尺度下精密机械件的设计、制造与应用的学科。
通过本课程设计,旨在帮助学生掌握精密机械学的基本理论和实践技能,为将来从事相关领域工作奠定扎实的基础。
2. 课程目标本课程的主要目标如下:•了解精密机械学的基本概念和原理;•掌握精密机械件的设计方法和流程;•学习常用的精密加工技术和工艺;•能够分析和解决精密机械问题;•提高学生的实践操作能力。
3. 教学内容本课程的教学内容主要包括以下几个方面:3.1 精密机械学基础理论•精密机械学的定义和发展历史;•精密机械学的基本概念和原理;•精密机械零件的分类和特点;•精密机械设计的基本要素;•精密机械系统的分析方法。
3.2 精密机械件设计•精密机械件的设计思路和方法;•精密机械件的功能需求和约束条件;•精密机械件的工程图纸绘制;•常用的精密机械件设计软件介绍。
3.3 精密加工技术•精密加工的基本概念和流程;•精密加工的常见工艺和设备;•精密加工中的常见问题和解决方法;•精密加工中的质量控制和检测方法。
3.4 实践操作•使用CAD软件进行精密机械件的三维建模;•进行精密机械件的工程图纸设计;•学习使用精密加工设备进行实际加工操作;•进行精密机械件的装配和调试。
4. 教学方法本课程采用以下教学方法:•理论授课:通过讲解,让学生了解基本理论知识;•实验演示:通过实际演示,帮助学生理解和掌握实践操作技能;•实践操作:让学生亲自动手进行实践操作,提高实际操作能力;•讨论互动:组织学生进行讨论和互动,加深理解和交流。
5. 评估方式本课程的评估方式主要包括以下几个方面:•课堂考核:通过课堂测试和讨论,考察学生的理论掌握程度;•实验报告:要求学生按要求完成实验,撰写相关实验报告;•设计项目:学生独立设计完成一项精密机械件,并撰写设计报告;•课程作业:布置一定的课程作业,考察学生的实践操作能力。
6. 参考教材•精密机械学(第四版),陈鹤年等著,机械工业出版社,2019年。
精密机械设计答案庞振基
精密机械设计答案庞振基-CAL-FENGHAI.-(YICAI)-Company One1精密机械设计答案庞振基【篇一:精密机械设计第11章答案】s=txt>①很高的旋转精度②承受重载、冲击、振动③尽可能小的尺寸和可拆卸④低速、轻载、不重要的支承。
11-2滑动支承的轴瓦材料应具有什么性能?试举几种常用的轴瓦材料。
①疲劳强度②抗压强度③减摩性、耐磨性,摩擦系数小④抗胶合性⑤润滑油有较好吸附能力⑥适应性和嵌藏性⑦导热性,热膨胀系数小⑧经济性,加工工艺性。
11-3滚动轴承基本元件有哪些各起什么作用外圈1、内圈2,滚动体3,保持架4。
滚动体形成滚动摩擦,保持架均匀地隔开滚动体。
11-5球轴承和滚子轴承各有什么特点适用于什么场合球轴承转速快、低噪音,承载能力小。
滚子轴承转速相对来说比较低,承载能力大,适用于大载荷。
11-6滚动轴承的寿命和额定寿命是什么含义何谓基本额定动载荷何谓当量动载荷轴承中任一元件出现疲劳剥落扩展迹象前运转的总转数或一定转速下的工作小时数称为轴承寿命。
额定寿命是指90%可靠度、常用材料和加工质量、常规运转条件下的寿命。
基本额定寿命为106r时轴承所能承受的恒定载荷取为基本额定动载荷。
滚动轴承同时承受径向和轴向联合载荷,经过折算后的某一载荷。
11-7角接触轴承的内部轴向力是怎样产生的?角接触轴承的滚动体与滚道的接触线与轴承轴线之间夹一个接触角,使轴承对轴的反力并不完全指向径向,既有径向力又有轴向分力。
11-8轴在工作中会产生热胀冷缩,为此两端轴承应采取何措施?⑴采用一端固定,一端游动的方式,温度较高长轴。
⑵两端固定,但在外圈留出少量膨胀量,温度不高的短轴。
11-9为什么要调整轴承游隙如何调整轴承游隙过大,将使承受载荷的滚动体数量减小,轴承的寿命降低,同时还会降低轴承的旋转精度,引起振动和噪声,轴承游隙过小,轴承容易发热和磨损,降低轴承寿命。
调整:使轴承内外圈作适当的相对轴向位移。
《精密机械设计基础》课程教学大纲(本科)
精密机械设计基础(Fundamentals of Precision Machinery Design)课程编号:03410034学分:3.5学时:56 (其中:讲课学时:50实验学时:6上机学时:0)先修课程:工程图学、工程力学适用专业:测控技术与仪器,光信息科学与工程等专业教材:《精密机械设计》,庞振基,机械工业出版社,2004年3月第1版一、课程性质与课程目标(-)课程性质《精密机械设计基础》主要讲授精密机械及仪器仪表中常用机构和零部件的工作原理、适用范围、结构、设计计算方法,以及工程材料、零件几何精度的基础知识等。
具体内容包括精密机械设计的基础知识,工程材料和热处理,零件的几何精度,平面机构的结构分析,平面连杆机构,凸轮机构、摩擦轮和带轮传动,齿轮传动,轴、联轴器、离合器,支承。
本课程强调工程观点、定量运算、实验技能和设计能力的训练,强调理论与实际的结合,提高分析问题、解决问题的能力。
止匕外,由于本课程是一门理论与实践密切结合的设计性课程,在教学过程中,除进行理论讲课外,还安排有习题课、实验课及课程设计等实践性教学环节。
为培养复合型人才奠定了工程基础。
(-)课程目标.能正确描述机械和精密机械的基本概念,及零件的设计方法;1.根据材料的分类,能正确划分常用工程材料;根据各种热处理方法的不同,在实际应用中能正确选用合适的热处理手段;2.能正确计算孔和轴配合的各种尺寸;能在图纸上正确标注形位公差和粗糙度等;.能正确绘制出给定实际机构的运动简图;能对给定的高副机构进行低代处理;能利用机构的组成原理正确进行结构分析;3.根据钱链四杆机构中曲柄存在的条件,由已知条件能求出未知杆长范围;能运用常见钱链四杆机构的设计方法,进行合理设计;.根据凸轮机构从动件常用运动规律,由给定的条件能用图解法设计常见的凸轮机构;4.能正确进行带传动中带的受力分析,能根据给定的工作条件正确选择合适的带传动;.能合理地设计直齿圆柱齿轮传动,并能正确进行校核;能利用适当的方法,正确计算各种轮系的传动比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《精密机械设计》是2010年北京大学出版社出版的图书,作者是田
明、冯进良、白素平。本书围绕仪器设备中的精密机械运动系统的组
成、功能、原理、特点、结构、精度和设计计算方法展开叙述。
内容简介
该书主要围绕仪器设备中的精密机械运动系统的组成、功能、原理、
特点、结构、精度和设计计算方法展开叙述,重点是研究精密机械的
基本理论、设计方法和设计手段,在传统相关教材基础上,增加了精
密仪器中的锁紧及微动装置、凸轮调焦机构、可变光阑及快门等新的
知识点,以适应现代精密仪器发展的需要。
本书共12章,分为五篇,内容为传动、运动支承、连接、仪器常用
组合件和弹性元件。全书重点内容突出,主线鲜明,结构严谨。
对于未编人的有关内容,可结合课程设计和毕业设计,引导学生通过
查阅参考书、设计手册拓宽知识面,以培养和提高学生运用文献资料
解决工程实际问题的独立工作能力。
本书可作为测控技术与仪器专业、光电专业的本科生教材,也可作为
相关专业工程技术人员的参考书