几种背景建模方法的研究
详细介绍上述背景建模的原理和作用。
详细介绍上述背景建模的原理和作用。
背景建模是图像处理和计算机视觉领域中的一个关键技术,它可以将图像中的前景和背景分离出来,是很多应用的基础,如视频监控、运动检测、基于内容的图像检索等。
在背景建模中,首先需要将一个场景中的静态背景建模出来。
这个过程中需要一系列的框架和算法来进行图像的处理和分析。
最初的背景建模方法可以被理解为几个阶段的连续处理,首先将一个视频序列的每个像素的值当做时间序列数据,然后对于像素序列使用统计方法(如高斯混合模型、均值移动等)对数据建模,并估计出每个像素点的背景模型。
之后,使用更新的算法来调整原有算子,以使得该算法可以跟踪物体的运动轨迹,进而完成功能和目标的跟踪。
背景建模的过程中,需要依靠一些假设和前提。
首先需要假设场景中的物体并不是彻底的静止不动的,背景建模的过程中,我们可以接受在场景中运动的一些物体,但是我们假定背景应该是一个静态的部分。
这个假设是默认成立的。
第二个假设是场景中的物体的底部有部分是与背景相同的,因此,在背景建模中,我们可以将底部设定为接近于背景的部分,然后我们可以在这个基础上对其他的物体进行关注。
通过这么做,背景建模就可以忽略掉底部部分的影响,直接从图像中筛选出目标物体,然后进行进一步的图像分析和处理。
背景建模的作用是将场景中的静态背景和动态前景进行有效的区分和提取,为后续的目标检测、跟踪、分割等任务提供了基础。
通过背景建模技术,我们可以消除光照变化、天气变化等因素对图像的干扰,使得我们对于物体的目标分析更加准确、清晰。
此外,背景建模还可以将场景中的多个目标进行分离,提高了视觉系统的识别能力。
然而,背景建模的精度和效率仍然面临许多挑战。
例如,场景中出现的相似物体容易产生干扰,不稳定的光照和天气变化也会对背景建模的精度造成影响。
因此,未来,需要不断优化和改进背景建模方法和算法,提高背景建模的性能和鲁棒性。
星空背景的建模与仿真

星空背景的建模与仿真引言利用计算机仿真技术生成的动态场景图象已被广泛地应用于虚拟战场仿真、目标识别与跟踪、导弹寻的模拟等众多国防领域中,它为未来国家防御系统和军事装备体系的建立和拓展奠定了基础。
其中,深空环境中星空背景的景象生成技术是实现对太空目标的识别与跟踪、导弹寻的等的关键技术之一。
虽然美国、英国和法国等发达国家已经对深空环境的仿真进行了长期的研究,研制了相应的计算机模拟系统,并在高技术战争中发挥了巨大的作用,但我国针对深空环境的计算机仿真研究仍处于起步阶段。
近年来,航天机电集团二院207所基于国际上公开发表的红外星表(IRASD的LRS数据),对指定时刻的任意方向和任意大小视场探测器所看到的红外星空点源背景进行了背景建模和仿真研究。
本文提出了一种基于星表数据的建模和仿真方法,模拟在任意观测时刻、任意观测地点观测到的星空背景。
根据球面天文学知识,利用依巴谷星表,首先经过一系列时间转换,将所提供的星表历元时刻的恒星位置数据转换到当前指定时刻的位置数据,然后经过一系列空间坐标转换,将恒星视位置坐标统一转换到观测点坐标,得到恒星在指定时刻相对于观测者的视位置,最后利用星空背景建模的结果,绘制出了在不同的观测时刻和不同观测地点所观测到的星空背景。
1.星空背景建模的总流程由于所采用的依巴谷星表的历元时间是2000年1月1日,也就是说,所得到的恒星位置数据相当于一个位于地心的观测者在没有大气的情况下在2000年1月1日所看到的恒星视位置,但需要的是在任意时刻、任意观测地点的恒星视位置,所以建模中最主要的就是时间和空间坐标的转换。
从而需要先将2000年1月1日的星表位置数据转换到当前指定时刻的位置数据,再经过空间坐标转换,得到恒星在指定时刻相对于观测者的视位置。
星空背景建模和仿真的流程框图如图l所示。
2.恒星视位置的计算根据依巴谷星表所提供的恒星在星表历元时刻的平位置和恒星的自行、视差等参数,通过一系列的时间和空间的转换,可以计算在观测瞬间时刻恒星相对于观测点的视位置。
wa 找背 原理

wa 找背原理背景是一个数学概念,通常用于图像处理和计算机视觉领域。
它是指通过一个模型来预测图像中的物体或场景。
背景模型是通过对一系列图像进行训练而得到的,它可以根据输入图像的特征来判断图像中的背景信息。
在传统的背景建模方法中,常用的技术包括高斯混合模型、自适应背景模型等。
这些方法在一定程度上可以有效地处理静态背景的问题,但是对于复杂的场景和动态背景来说,效果并不理想。
近年来,随着深度学习的发展,一些新的方法被提出来用于背景建模。
其中一种方法就是基于wa的背景建模。
wa是一种基于深度学习的图像处理技术,它通过对图像中的物体进行分类和定位,来实现对背景的建模。
wa的背景建模方法可以分为两个步骤:特征提取和分类定位。
在特征提取阶段,wa会对输入图像进行预处理,提取出图像中的关键特征,例如颜色、纹理和形状等。
这些特征可以帮助wa更好地理解图像中的物体。
在分类定位阶段,wa会利用训练好的深度神经网络模型对提取的特征进行分类和定位。
通过对图像中的物体进行分类,wa可以将背景和前景进行区分。
同时,wa还可以通过定位物体的位置来更准确地建模背景。
wa的背景建模方法相比传统方法有以下优点:1. 更好的适应性:wa可以根据输入图像的特征来动态调整背景模型,适应不同的场景和环境。
2. 更高的准确性:wa使用深度学习技术,可以更准确地分类和定位图像中的物体,从而更精确地建模背景。
3. 更快的处理速度:wa的背景建模方法可以利用GPU加速,提高处理速度,适用于实时应用。
然而,wa的背景建模方法也存在一些挑战和限制:1. 数据需求:wa的背景建模方法需要大量的标注数据来训练深度神经网络模型,这对于一些特定的场景来说可能比较困难。
2. 计算资源:深度神经网络模型需要大量的计算资源来进行训练和推理,这对于一些资源有限的设备来说可能存在问题。
3. 对输入图像的要求:wa的背景建模方法对输入图像的质量和分辨率有一定要求,低质量的图像可能会影响模型的准确性。
背景替换算法
背景替换算法1. 引言背景替换算法是图像处理中的一项重要技术,用于将图像中的背景与前景分离,从而实现背景的替换或去除。
通过使用背景替换算法,人们可以轻松地在图像中更改背景,增强图像的可视性,或者将图像中的对象提取出来用于其他应用。
本文将深入探讨背景替换算法的原理、应用以及未来的发展方向。
2. 原理2.1 色彩模型背景替换算法的基础是对图像进行色彩模型的分析。
常见的色彩模型包括RGB(红绿蓝)、HSV(色调饱和度亮度)和CMYK(青、品红、黄、黑)等。
通过对图像的每个像素进行色彩分析,可以将背景与前景进行区分。
2.2 背景建模背景建模是背景替换算法的核心步骤之一。
它通过对连续的图像帧进行分析,建立背景模型。
常见的背景建模算法包括高斯混合模型和自适应背景建模算法。
高斯混合模型利用高斯分布来表示像素值的概率分布,从而判断像素是否属于背景。
自适应背景建模算法则根据图像中像素值的变化来自动更新背景模型,适应场景的变化。
2.3 前景提取在背景建模的基础上,背景替换算法需要对前景进行提取。
常见的前景提取算法包括基于阈值分割的方法、基于边缘检测的方法和基于纹理分析的方法等。
这些算法通过将像素进行分类,将属于前景的像素与背景进行分离。
2.4 背景替换背景替换是背景替换算法的最终步骤。
在前景提取之后,算法将前景与新的背景进行合成,用于替换原始图像的背景。
这一步骤可以使用图像融合算法、深度合成算法或者其他合成算法来实现。
通过合理选择合成算法,背景替换算法可以实现平滑自然的背景切换。
3. 应用3.1 视频制作背景替换算法广泛应用于视频制作领域。
在电影特效制作中,背景替换算法被用于将演员拍摄的视频与虚拟背景进行合成,创造出奇幻的视觉效果。
同时,背景替换算法也可以应用于视频剪辑中,让用户可以轻松更改视频的背景,实现个性化的创作。
3.2 虚拟现实背景替换算法在虚拟现实应用中有着重要的地位。
通过使用背景替换算法,可以将真实环境中的背景替换为虚拟场景,提供更加沉浸式的虚拟现实体验。
一种融合纹理和颜色信息的背景建模方法

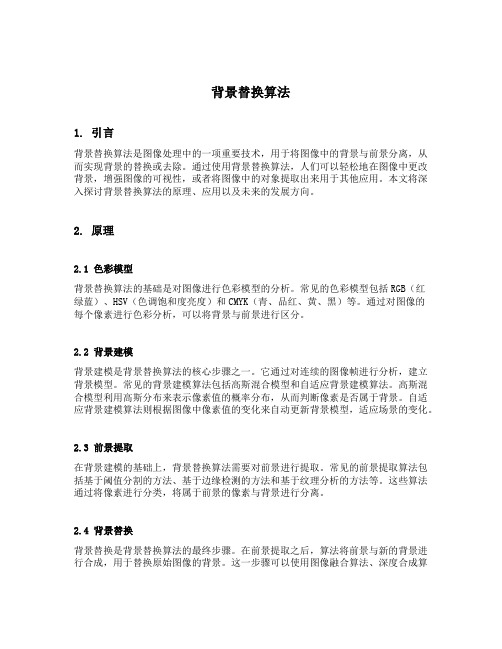
一种融合纹理和颜色信息的背景建模方法王吉文;何加铭【摘要】鉴于目前视频序列的运动目标检测常使用背景差分法,但其受光照变化以及阴影影响,不能准确区分出运动物体的特点,因此提出一种新的背景建模算法。
该算法融合纹理信息和颜色信息建立背景模型,其中的纹理信息采用LBP算子进行描述。
为更好地描述纹理信息,进一步改进了基本的LBP算子,并同时引入抗噪因子增强抗噪声影响。
实验证明,提出的算法在大多数情况下都取得良好的效果。
%Currently, the background subtraction is often used in moving target detection of video sequences. However, with the varying illumination and shadow, this method can not accurately distinguish motioning objects. To tackle this shortfall, a new background modeling algorithm which fuses texture and color information to create a background model is proposedin this paper. The texture information is often described with LBP (local binary pattern, local binary mode) operator. The basic LBP operator is improved in this work to characterize the texture information, while theanti-noise factor is also introduced to enhance the anti-noise impact. Experimental results show that the proposed algorithm has achieved satisfactory results in most cases.【期刊名称】《宁波大学学报(理工版)》【年(卷),期】2013(000)001【总页数】5页(P43-47)【关键词】运动目标检测;背景差分;背景建模;纹理信息;局部二值模式;抗噪因子【作者】王吉文;何加铭【作者单位】宁波大学通信技术研究所,浙江宁波 315211; 浙江省移动网应用技术重点实验室,浙江宁波 315211;宁波大学通信技术研究所,浙江宁波 315211; 浙江省移动网应用技术重点实验室,浙江宁波 315211【正文语种】中文【中图分类】TP391.4运动目标检测在视频监控、智能交通等领域都有着广泛的应用. 背景差分法凭借对硬件要求低、算法设计相对简单、效果良好等优点,成为了运动目标检测的重要方法. 背景差分就是将背景从视频图像中除去,提取运动目标. 但由于背景模型受到自然环境等因素影响,使得背景建模是一个长期而艰难的研究课题.背景的描述通常分成两类:一类是采用颜色等图像像素信息来描述背景,另一类是采用纹理等图像结构信息来描述背景. 第一类算法以高斯模型[1]为代表,对所有像素点都使用高斯模型,共同组成背景模型. 由于高斯模型无法解决风吹动树叶、光照的变化等外界干扰,Grimson[2]提出了混合高斯模型(Mixture of Gaussian,MOG),建立多个模型来描述背景,因此对这些问题的解决有一定的效果. MOG也是目前使用最广泛的算法,但对该算法的改进[3-4]也一直进行着. 这类算法对于大多数情况甚至包括光照渐变具备很好的效果,但对于阴影的处理却表现得不尽人意. 另一类算法以纹理信息建立背景模型为代表,其中最著名的算法是Heikkila等人[5]提出统计某个区域内的基本LBP (Local Binary Pattern,局部二值模式)纹理得到 LBP纹理直方图,并利用其直方图建立的背景模型. 由于纹理信息几乎不受光照变化及阴影的影响,使得纹理建模,特别是LBP纹理模型深受研究者[6-7]的喜爱. 此类算法在绝大多情况下都有很好的效果,但对于区域纹理特征不丰富的情况下,表现也不尽人意. 如再天空、海洋等区域纹理特征不丰富的情况,就无法区分前景与背景,此时判断得出的背景就往往出现空洞等情况.通过分析两类算法的优缺点后可知,若将两者融合,即融合颜色信息与纹理信息描述背景信息,似乎可以得到很好的背景模型. 近年来,对融合颜色与纹理信息描述背景的算法[8],在一定程度上改善了单一模型无法解决的问题,但在如何更好地结合两者,却成为了亟待解决的问题. 目前大多数的融合算法都采用联合参数[9-11]方法,但比较生硬结合,不能很好解决这个问题.笔者采用的融合算法区别于通过联合参数进行融合的方法,采用纹理筛选,再结合颜色信息建立背景模型的融合方法,算法简单,效果也有明显改进.1.1 LBP纹理特征LBP是一种灰度变化描述算子[5],该算子通过对像素与邻域像素的差值进行二值化,从而得到二元图,LBP算子定义如下:其中,gc表示区域内中心位置(xc,yc)处的像素灰度值;gp表示均匀分布在中心(xc,yc)半径为R的圆周上P个点的灰度值,对于那些不能落在精确位置的像素点进行灰度值内插.图1为3×3邻域(半径取1,圆周上8个点),其中1到8即为LBP算子编码的顺序. 一般情况下,选取圆周上点数越多,纹理描述越准确,但是复杂度也相应提高.1.2 LBP算子改进LBP算子进行纹理描述时虽有很多优点,但也存在一些不足. 首先,像素之间差值有3种状态,即 =0,> 0,< 0. 它们分别表示不同意义, > 0与<0分别表示像素值变大或变小, =0表示像素值不变,显然将 LBP算子运用到纹理建模不应该将 = 0与> 0情况归为一类. 因此为提高抗噪声能力,引入抗噪因子n,即可以改进的LBP算子如下:利用(2)式将 3种状态进行区分. 引入抗噪因子n∈ {2,5},文中根据经验值取n=3. 但是(2)式存在一个问题,即将2p改为 22p时,计算量也由此大大增加,内存也消耗过大. 所以对LBP算子再次作了如下改进:(3)式中将u>n表示为(1,0),u<n表示为(0,1), −n≤u≤n表示为(0,0)),同样能够表达(2)式的 3种情况. 通过统计区域内像素点的基本 LBP纹理得到 LBP直方图,引入二元直方图的方式表示LBP算子,虽然2次计算LBP算子,但是准确度却大大提高,同时较(2)式表示方法也大大降低了计算的复杂度,节约了内存.1.3 颜色信息描述颜色信息模型就是对图像中的每个像素的颜色或灰度值进行建模,以此获取每个像素的颜色信息. 不妨设像素点值的概率密度分布符合高斯分布,每个像素点由K个高斯模型表征,则第k个高斯分布的概率密度函数为:式中,kμ表示均值矢量,k∑ 表示协方差矩阵.当前像素点颜色值与该像素点位置的过去时刻像素颜色值相关,其概率为:式中,即是t−1时刻第k个高斯模型的均值;表示t时刻像素点的颜色值;表示时刻t 在(x,y)处,当前像素点的颜色值与上一时刻第k个高斯模型颜色均值的差是否在±2.5σ范围内,在范围内,则判断为当前像素点匹配第k个高斯模型,否则不匹配. 1.4 纹理信息融合颜色信息的背景描述纹理模型在绝大多数情况下都可以很好地区分前景与背景,但对于纹理特征不丰富的时候,由于其灰度值太过于接近,所以 LBP算子将无法区分前景和背景. 而颜色信息在绝大多数情况下保持稳定,当纹理特征不丰富的时候,颜色信息也同样具有很好的区分度,故融合纹理信息与颜色信息表示背景模型. 笔者将背景表示如下:其中,为像素点直方图信息;为颜色信息,采用混合高斯模型方式表征. 笔者采用二元LBP直方图的纹理模型与基于颜色特征的混合高斯模型进行融合,并且采用共同权值的方式. 对于1帧图像先进行LBP纹理信息建模,纹理筛选过滤混合高斯模型无法处理的阴影,再进行混合高斯模型处理,得到的背景受到的阴影影响不大,又不会出现明显空洞问题,而大量的实验也验证了此算法的有效性.2.1 背景建模本算法实施过程的前提是摄像头为静止,并且建模与更新都是针对像素点独立进行,但此并不影响算法有效性. 阐述像素点的建模过程如图2所示.在图2的流程中,首先对图像序列进行LBP编码,计算当前像素点的LBP直方图,将当前帧像素点的LBP直方图Ha与背景模型中对应像素的直方图Hb进行匹配性比较,即与当前背景模型的直方图进行相似性比较. 参考文献[5],用(8)式来衡量它们的相似性:式中:为LBP直方图,根据(3)式计算2次 LBP直方图,若1次的值相同则表示相似;N 为条目数. 相似性度量的阈值aT是用户设定的参数,根据文献[5],一般在0.6~0.7之间就可得到较好的结果. 对于背景模型包含的K个直方图,可根据其权值进行降序排列. 将当前帧中像素点的 LBP直方图Ha与降序排列好的进行相似性匹配. 如果背景模型中所有直方图相似度都小于aT,那么进行参数更新,最低权值的直方图将被Ha取代,并被赋予低的初始权值,此时一般取 0.01~ 0.05,同时作权值的归一化处理. 如果找到了匹配的直方图,则进行匹配模型更新. 需按(9)式更新背景直方图:式中,ba为用户设定的学习速率.直方图的权值更新如下:式中,kM对于匹配的直方图值为 1,其余值为 0.背景模型的更新速度由学习速率参数ba,wa来控制;其值由用户设定,数值越大模型更新越快,但易受噪声影响. 通常情况下它们取值较小,如0.01~0.05就可得到好的结果. 至此即完成了纹理筛选工作.2.2 背景更新和前景提取纹理筛选过的像素点依然满足高斯分布.若满足(6)式匹配为 1,判断为背景,否则判断为前景.如果判断出是背景,则进行下列更新:其中,ma与wa都为学习率. 通常情况下,它们取0.01~0.05间的较小值就可以得到较好的结果;取值越大,背景更新越快,此时适用于变化快的背景;而取值越小就适用于稳定的背景.背景定义如下:将 LBP直方图与高斯模型按照权值进行降序排序,并在K个降序排列好的直方图与高斯模型中选取满足下式的最少的前B个直方图与高斯模型来表征背景(BK< ):式中,BT为用户设定的1个阈值,其值与K紧密相关,参考文献[3],K值一般取3~5,BT一般取0.6~ 0.7.前景检测在背景模型更新前完成,而利用(6)式可进行前景提取.实验从多个常用数据测试集的测试序列中选取3个进行实验. 其中,图3为室外弱阴影,大量区域纹理接近视频序列. 图4选取的序列是室内灯光照射运动物体产生阴影的视频序列. 图5为交通监控的视频序列.首先,比较文中算法与其他算法的室外场景背景建模结果(图 3). 从图 3可以看出混合高斯模型无法解决阴影问题,而 LBP纹理建模却可以较好解决阴影问题,但是对于墙壁、地面这些纹理信息不丰富的情况却无法区分前景与背景;对于衣服纹理接近的情况下,则出现了大量的空洞. 而本文算法相对于混合高斯模型,阴影少了很多,相对于LBP纹理分割的结果,空洞也少了许多.对于室内的处理情况如图4所示. 从图4中可以很明显看出混合高斯模型在光照发生变化的时候,阴影问题非常突出;衣服纹理接近的情况下,LBP纹理分割算法显得无力. 而本文算法得到了较好的处理能力.为了更好说明本文算法的实用性,图5即为本文算法在高速公路上的处理效果. 从高速公路视频序列与其他算法比较可以看出,本文算法在真实场景中也具有很好的处理效果,可为智能交通监控应用提供了可靠的支持.最后,对本文算法性能也做了测试. 采用电脑的主频1.6GHz,内存为988MB. 图像的分辨率为360×240,参数的选择参照文中第2节与第3节内容,得到本文算法平均处理速度为21f·s-1,基本上满足实时性要求.提出了一种新的融合纹理和颜色信息的背景建模方法,通过大量的实验及替换多种场景,结果都验证了本文算法的有效性,新算法既解决颜色信息模型阴影问题,又解决了纹理信息模型在纹理信息不丰富的情况下无法区分前景与背景的问题.目前,本文方法还存在少量阴影与少量空洞问题. 因此,拟改进纹理建模与混合建模融合算法,采用动态融合方法改进阈值的选择,使之自适应视频序列的变化;拟引入运动学的形状分割技术对运动物体预判断;拟采用形态学图像处理相关技术优化处理结果;这些将是今后需研究的方向.【相关文献】[1] Wren C R,Azarbayejani A,Darrell T,et al. Real-time tracking of the human body[J]. IEEE Transaction on Pattern Analysis and Machine Intelligence,1997,19(7):780-785.[2] Stauffer C,Grimson W E L. Adaptive background mixture models for real-time tracking[C]. Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition,1999:246-252.[3] Lee D S. Effective Gaussian mixture learning for video background subtraction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(5):827-832.[4] Lin H H,Chuang J H,Liu T L. Regularized background adaptation:A novel learning rate control scheme for Gaussian mixture modeling[J]. IEEE Transactions on Image Processing,2011,20(3):822-836.[5] Heikkila M,Pietikainen M. A texture-based method for modeling the background and detecting moving objects[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(4):657-662.[6] Zhang Baochang,Gao Yongsheng. Kernel similarity modeling of texture pattern flow for motion detection in complex background[J]. IEEE Transactions on circuits and systems for video technology,2011,21(1):29-38.[7] Kim W,Kim C. Background subtraction for dynamic texture scenes using fuzzy color histograms [J]. IEEE Signal processing letters,2012,19(3):127-130.[8] Marks T K,Hershey J R,Movellan J R. Tracking motion,deformation,and texture using conditionally Gaussian processes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(2):348-363.[9] 徐剑,丁晓青,王生进,等. 一种融合局部纹理和颜色信息的背景减除方法[J]. 自动化学报,2009,35(9):1145-1150.[10] Chua T W. Fuzzy rule-based system for dynamic texture and color based background subtraction[C]. 2012 IEEE International Conference on FuzzySystems,Brisbane,QLD,2012:1-7.[11] 刘泉志,胡福桥. 混合高斯模型和 LBP纹理模型相融合的背景建模[J]. 微型电脑应用,2010,26(9):42-45.。
一种基于纹理和强度特征融合的多尺度背景建模方法[发明专利]
![一种基于纹理和强度特征融合的多尺度背景建模方法[发明专利]](https://img.taocdn.com/s3/m/b334068d561252d381eb6ec1.png)
专利名称:一种基于纹理和强度特征融合的多尺度背景建模方法
专利类型:发明专利
发明人:王春恒,张重,肖柏华,周文
申请号:CN201110163655.7
申请日:20110617
公开号:CN102222339A
公开日:
20111019
专利内容由知识产权出版社提供
摘要:本发明是一种基于纹理和强度特征融合的多尺度背景建模方法。
对输入图像序列进行多尺度变换;对每个尺度的图像用尺度不变中心对称的局部三元模式算子表示,用自适应的模式核密度方法计算每个尺度图像中所述模式属于背景的概率,并把累加权值超过纹理比重阈值的概率密度分布作为背景,计算所述模式属于背景的概率;把每个尺度的强度图像表示为强度图像,把权值累加超过强度比重阈值的高斯模型作为背景,用简化的混合高斯模型计算此强度值属于背景的概率;将相同尺度的图像纹理和图像强度进行融合,再将不同尺度的图像进行融合得到属于背景的最终概率,当此概率大于前背景分割阈值时则属于背景,反之则属于前景。
申请人:中国科学院自动化研究所
地址:100190 北京市海淀区中关村东路95号
国籍:CN
代理机构:中科专利商标代理有限责任公司
代理人:梁爱荣
更多信息请下载全文后查看。
游戏开发中的场景建模技术

游戏开发中的场景建模技术一、引言随着科技的不断发展,游戏开发技术也在不断发展。
游戏开发中的场景建模技术是游戏开发中的一个重要环节,可以使游戏世界更加真实、自然、立体。
本文将介绍游戏开发中的场景建模技术。
二、3D建模技术3D建模技术是游戏开发中应用最广泛的技术之一。
它主要用于制作游戏场景和角色模型。
在游戏场景的建模中,3D建模技术可以通过一个三维模型来呈现游戏场景,给玩家创造出虚拟而真实的游戏环境。
3D建模技术包括多边形网格模型、曲面模型、NURBS模型等。
常被用于游戏场景建模的是多边形网格模型。
这种模型适用于游戏场景的建模,其制作方法相对简单,而且不占用太多的存储空间。
在制作多边形网格模型时,需要注意模型的细节,比如立体感、抛光度等。
三、材质与贴图材质和贴图是游戏场景建模中的一个重要环节。
材质和贴图可以使游戏场景更加写实,增加视觉效果。
游戏场景建模中的材质有多种,包括金属材质、木材材质、水材质等。
在制作材质时,需要考虑色调、光源和材质的表面反射度。
贴图是游戏场景建模中必不可少的一部分。
贴图可以让游戏场景表面显示出更多的细节和纹理。
常用的贴图有漫反射贴图、法线贴图、高光贴图等。
在制作贴图时,需要注意表面细节和纹理的贴图。
四、灯光效果灯光效果是游戏场景建模的重要环节。
它可以为游戏场景赋予更加真实的视觉效果。
在游戏场景建模中,灯光有很多种类型,包括环境光、定向光、点光源等。
环境光可以使游戏场景中没有直接光源时仍然看起来明亮,定向光可以让游戏场景中的某些物体显得更加明亮。
点光源则可以用于为游戏场景中的某些物体添加光影效果。
五、粒子特效粒子特效是游戏场景建模中常用的一种技术,它可以为游戏场景增加更加真实的气氛。
粒子特效可以用于制作雨、雪、火、烟等效果。
制作粒子特效时需要注意粒子的形状和大小、粒子的数量和速度等。
六、总结场景建模技术是游戏开发中的一个重要环节,可以使游戏场景更加真实、自然、立体。
3D建模技术、材质和贴图、灯光效果以及粒子特效是游戏场景建模的关键技术。
一种分步的融合 时空信息的背景建模
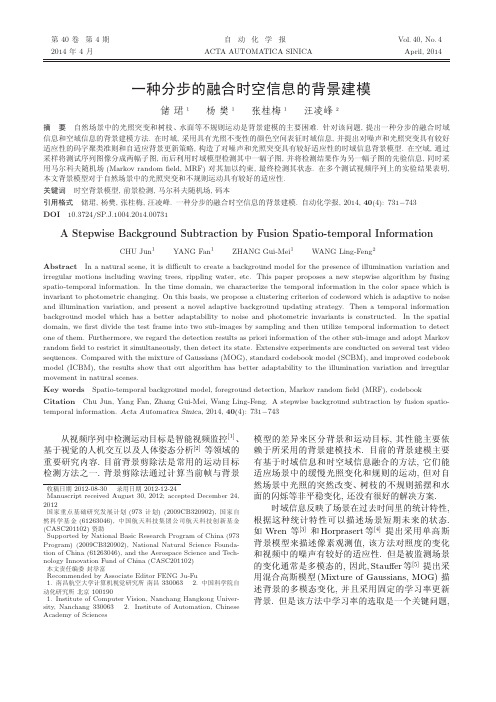
图1
Fig. 1
融合时空信息的背景模型算法框图
Flowchart of background subtraction by fusion spatio-temporal information
4期
储珺等: 一种分步的融合时空信息的背景建模
第 40 卷 第 4 期
2014 年 4 月
自 动 化 学 报
ACTA AUTOMATICA SINICA
Vol. 40, No. 4 April, 2014
一梅 1 汪凌峰 2
摘 要 自然场景中的光照突变和树枝、水面等不规则运动是背景建模的主要困难. 针对该问题, 提出一种分步的融合时域 信息和空域信息的背景建模方法. 在时域, 采用具有光照不变性的颜色空间表征时域信息, 并提出对噪声和光照突变具有较好 适应性的码字聚类准则和自适应背景更新策略, 构造了对噪声和光照突变具有较好适应性的时域信息背景模型. 在空域, 通过 采样将测试序列图像分成两幅子图, 而后利用时域模型检测其中一幅子图, 并将检测结果作为另一幅子图的先验信息, 同时采 用马尔科夫随机场 (Markov random field, MRF) 对其加以约束, 最终检测其状态. 在多个测试视频序列上的实验结果表明, 本文背景模型对于自然场景中的光照突变和不规则运动具有较好的适应性. 关键词 引用格式
CHU Jun1 YANG Fan1 ZHANG Gui-Mei1 WANG Ling-Feng2 Abstract In a natural scene, it is difficult to create a background model for the presence of illumination variation and irregular motions including waving trees, rippling water, etc. This paper proposes a new stepwise algorithm by fusing spatio-temporal information. In the time domain, we characterize the temporal information in the color space which is invariant to photometric changing. On this basis, we propose a clustering criterion of codeword which is adaptive to noise and illumination variation, and present a novel adaptive background updating strategy. Then a temporal information background model which has a better adaptability to noise and photometric invariants is constructed. In the spatial domain, we first divide the test frame into two sub-images by sampling and then utilize temporal information to detect one of them. Furthermore, we regard the detection results as priori information of the other sub-image and adopt Markov random field to restrict it simultaneously, then detect its state. Extensive experiments are conducted on several test video sequences. Compared with the mixture of Gaussians (MOG), standard codebook model (SCBM), and improved codebook model (ICBM), the results show that out algorithm has better adaptability to the illumination variation and irregular movement in natural scenes. Key words Spatio-temporal background model, foreground detection, Markov random field (MRF), codebook Citation Chu Jun, Yang Fan, Zhang Gui-Mei, Wang Ling-Feng. A stepwise background subtraction by fusion spatiotemporal information. Acta Automatica Sinica, 2014, 40(4): 731−743
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
几种背景建模方法的研究
摘要:在本文中,我们比较了各种背景建模算法在城市交通视频序列中,对于检测运动车辆和行人的影响。
我们考虑了不同的方法,从简单的技术,如帧差分和中值滤波到更多复杂的概率建模技术。
说明各种算法在不同情况下性能优劣。
关键词:运动目标检测,帧差法,中值滤波法,混合高斯分布法
目前背景提取的算法很多,有基于时间轴的滤波方法,如中值滤波;有基于统计模型的方法,如混合高斯分布模型。
虽然方法很多,但是很难找到一种在各种情况下都表现最好的算法。
本文主要比较帧差法,中值滤波,混合高斯滤波在不同情况下的性能优劣。
1 帧差法
帧差法是最为常用的运动目标检测和分割方法之一,基本原理就是利用基于时间序列图像中相邻两帧或者几帧图像逐个像素进行对比得到一副差值图像,然后通过事先确定的阈值对差值图像进行二值化处理。
在环境亮度变化不大的情况下,如果对应像素值变化小于事先确定的阈值时,可以认为此处为背景像素如果图像区域的像素值变化很大,可以认为这是由于图像中运动物体引起的,将这些区域标记为
前景像素,利用标记的像素区域可以确定运动目标在图像中的位置。
简单的两帧差对噪声有一定的敏感性,而且对象运动的速度不能太快,否则由于背景被运动物体的遮挡和重现使得计算出的运动区域的掩模要大于运动物体的尺寸。
两帧间运动物体的位移越大,这种差距就越大。
由于相邻两帧间的时间间隔非常短,用前一帧图像作为当前帧的背景模型具有较好的实时性,其背景不积累,且更新速度快、算法简单、计算量小。
2中值滤波
选择像素灰度,通过包含运动目标的序列帧提取初始背景。
对视频中的任意一个像素点,只有在前景运动目标通过该点时,它的灰度值才会发生明显变化,其余大部分时间处,该点的灰度值是基本保持不变的,总是在一个区域内波动,因此可以用这个区域内的中值作为该点的背景值。
若有L帧视频图像,只有当L帧图像内有一半以上是背景的灰度值,目标灰度和噪声很少的情况下,该算法才具有可行性。
在该算法中,L的选择很关键,如果取值过大,算法的运算时间较长,若小,检测运动缓慢的目标时将会产生漏检,甚至出现空洞现象。
3混合高斯
建立背景模型,假定初始背景中不含运动目标。
其基
本思想是:对于每个像素,定义K(基本为3~5个,K值越大处理波动的能力越强)个高斯模型来表征图像中各个像素点的特征,在新一帧图像获得后更新混合高斯模型。
用当前图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点.否则为前景点。
若每个像素点颜色取值用变量表示,其概率密度函数为:
4 实验结果与分析
本文所用仿真软件是MATLAB2012b,图4.1研究了将彩色图像转换成灰度图像,然后通过帧差法进行背景建模。
算法的不足在于对环境噪声较为敏感,对于比较大的、颜色一致的运动目标,有可能在目标内部产生空洞,无法完整地提取运动目标。
帧间差分法只能应用在摄像机静止情况下的动态目标检测。
图4.1 视频traffic1中的第九帧(帧差法)
图4.2研究了将彩色图像转换成灰度图像,然后通过灰度值的中值来进行背景建模。
总体来说中值法的效果比帧差法的效果理想。
该算法存在的问题在于:图像帧的像素点大多以数万,数十万的数量级出现,而用于取中值的图像帧数量L也应该比较大。
对如此大的数组进行排序取出中值,实现时计算量较大,处理较慢。
同时需要占用大量的内存单元用于存储数据。
图4.2 视频traffic1中的第九帧(中值法)
图4.3利用混合高斯法进行背景建模。
混合高斯适应背景随时间的缓慢变化,能描述背景中的一些较大的周期性扰动,能适应背景内容的变化。
但是无法精确提取缓慢运动的目标,不能适应背景的突然变化,存在噪声,阴影时容易导致误检或者漏检的现象。
混合高斯更适应于外部环境比较复杂的情况。
图4.3 视频traffic1中的第九帧(混合高斯法)
5 结束语
通过实验发现,帧差法和中值滤波法适合特定的场合,即外部扰动比较小的情况,混合高斯法在外部环境变化较大的情况下效果更好。
参考文献:
[1] R. Cucchiara, M. Piccardi, and A. Prati,“Detecting moving objects, ghosts, and shadows in video streams,”IEEE Transactions on Pattern Analysis and Machine Intelligence 25, pp. 1337-1342, Oct 2003.
[2] B. Lo and S. Velastin,“Automatic congestion detection system for underground platforms,”in Proceedings of 2001 International symposium on intelligent multimedia,video,and speech processing, pp. 158-161,(Hong Kong), May2001.
[3] Q. Zhou and J. Aggarwal,“Tracking and
classifying moving objects from videos,”in Proceedings of IEEE Workshop on Performance Evaluation of Tracking and Surveillance, 2001.
[4]Sen-Ching S. Cheung and Chandrika Kamath,”Robust techniques for background subtraction in urban traffic video,” in Proceedings of the SPIE 5308,Visual Communications and Image Processing 2004.
作者简介:郭茹侠( 1990.5.27-)陕西省西安市人,长安大学硕士研究生;李日财(1990.4. 25-)男,辽宁省大连市人,西安邮电大学硕士研究生。