汽车防追尾和防侧撞安全系统设计
汽车防碰撞系统研究文献综述
汽车防碰撞系统研究文献综述1.引言汽车碰撞有汽车碰撞到固定的物体或与行驶中的汽车相撞两种类型。
为了防止汽车在行驶中,特别在高速行驶时发生碰撞,一些现代汽车已装备了自动控制防碰撞系统,这是一种主动安全系统。
汽车行驶时,防碰撞系统处于监测状态,当汽车接近前车车尾或超越前车时,该系统将发出警告信号。
在发出警告后,如果驾驶员没有采取减速制动措施,该系统便启动紧急制动装置,以避免发生碰撞事故。
2.概述防碰撞控制系统装有测距传感器,它们利用激光、超声波或红外线,测得汽车与障碍物间的距离,这个距离信号,加上车速传感器和车轮转角传感器的信号送入电子控制器,通过计算求出行驶汽车与前方物体的实际距离以及相互接近的相对速度,并向驾驶员发出预告信号或显示前方物体的距离。
当将要碰撞时,控制器向制动装置和节气门控制电路发出控制指令,使汽车发动机降速并及时制动,从而有效地避免碰撞。
3.测距传感器(1)防碰撞传感器① CCD照相机CCD(电荷耦合器件)摄像元件可以读取受光元件接收的光通量放出的电流值,并作为图像信号输出。
在夜间,由于照相机处于低照度的环境,只有在汽车前、后照灯打开时才能确认障碍物。
汽车装设的CCD照相机如上图所示,当点火开关接通时,变速器换档杆换到前进档或倒档,多功能显示板上就能显示出车辆前方或后方的图像。
② 激光雷达激光雷达是从激光发送至被测物体,然后反射回来被接收,其间的时间差即用来计算至障碍物的距离。
早期的车用激光雷达都是发送多股激光光束,并依靠前车反射镜的反射时间来测定距离。
现代汽车除了测定前方车的距离外还要对前方多辆车的位置进行辨识,因而开始采用扫描式激光雷达。
根据物体的反射特性,激光的反射光亮变化很大,因此可能检测出的距离也是变化的。
由于车辆后部的反射镜等容易反射,故可以检测出稳定的较长距离。
有少许凹凸的铁板等因不能得到充足的反射光量,故测出的距离较短。
另外,在检测侧面方向及后方的障碍物时,与检测前方障碍物的情况不同,如果障碍物上没有反射镜,那么由于各种障碍物的反射特性变化很大,故可能稳定测出的距离 变短。
汽车防追尾碰撞系统的研究

式中5 为临 界行 车安 全车 距 , 两车 不致 相 撞 指 的最短 距 离 , 见 建 立 防撞 数 学 模 型 的 关 键 是 求 可
高速公路的事故类型 , 大多数为车辆追尾碰撞 事故 , 这是由高速公路的特点所决定 的。高速公路 属于全封闭、 立体交叉 、 具有中央分隔带 。所 以行车
故极少 。但因其车速高, 以在雨 、 所 雪天气路面溜滑 或雾天视线不 良等情况下很容易发生制动侧滑 、 甩 尾或行 车视距 不 足而导 致追 尾碰 撞事 故 。
从 安全行 车 的 角度 考 虑 , 动 防撞 远 远优 于传 主
开 始 预报警 时刻
…
V 。
统的被动防撞 , 只是由于成本较高 目前尚不能普及 。 随着 主动 防撞技 术 的逐 步 完 善 , 在 未来 的 汽 车上 它
外a 和 a 可 由下列 两式 求得 : :
a1
—
la) 2 o ,f +t2 ] 1+ -
V a+ l la) o t一 。 + ll o f
— 一
d】 v
’ { X2
d vl 2
根据 有关 资 料 , 可作 以下 假 设 : t . , =12St =
Vo . No. 16. 2
Jn 20 u .,0 6
文章编号 :6 1 44 (0 6 0 —0 0 0 17 — 6 4 20 )2 0 4— 3
汽 车 防追尾 碰 撞 系统 的研 究
丁士 清 , 郑 波2
(. 1 南京工业职业技术学院 机械工程 系, 南京 20 1 ; 江苏 10 6 2 南京晓庄学院 化 学系, 南京 20 1) . 江苏 10 7
道上 的 车辆与横 向 车辆 、 人 及 对 面 车 辆 相 撞 的 事 行
一种汽车开门主动防撞预警装置的设计与研发

一种汽车开门主动防撞预警装置的设计与研发1. 引言1.1 背景介绍汽车是人们日常生活中不可缺少的交通工具,在现代社会中起着重要的作用。
随着汽车数量的不断增加,交通事故也随之增多。
开车门时与其他车辆或行人相撞的情况时常发生,造成了严重的人身伤害和财产损失。
为了解决这一问题,一种汽车开门主动防撞预警装置应运而生。
汽车开门主动防撞预警装置利用先进的传感技术和智能控制系统,能够及时感知周围环境中的车辆和行人,并发出警示信号,提醒驾驶员注意开门的安全。
这种装置不仅可以有效避免开门时发生碰撞事故,还可以提高驾驶员的安全意识和驾驶体验。
通过对汽车开门主动防撞预警装置的设计与研发,可以为汽车安全性能的提升做出贡献,减少交通事故的发生。
这项技术的推广应用也将对整个社会产生积极影响,提升交通安全水平,保障行人和车辆的安全。
对这一技术进行深入研究和开发具有重要意义。
1.2 研究意义汽车开门主动防撞预警装置的设计与研发具有重要的研究意义。
随着汽车数量的持续增加,车辆之间的交通密度也在不断增加,容易发生相互碰撞的情况。
尤其是在停车场、狭窄道路和拥挤的城市街道中,车辆开门时往往存在盲区,很容易造成侧面相撞的事故。
通过研发一种能够主动防撞的汽车开门预警装置,可以有效地减少此类事故的发生,提升汽车的安全性和行车舒适度。
汽车开门主动防撞预警装置还具有提升驾驶员和乘客的安全意识的作用。
驾驶员在使用这种预警装置的会对车辆周围的情况有更加全面的了解,提高了开车时的警惕性,减少了意外的发生几率。
乘客也能够通过装置的警示声音或光线提醒,注意避免开门造成的意外伤害。
研究开发汽车开门主动防撞预警装置有助于提升整个交通系统的安全性和效率,对未来的交通出行发展具有重要意义。
1.3 研究目的研究目的:本研究旨在设计和开发一种汽车开门主动防撞预警装置,通过使用先进的传感技术和智能算法,实现对汽车开门时周围环境的实时监控和预警,有效减少因车门开启不慎而导致的碰撞事故。
汽车防碰撞控制装置系统分析

即从激光 扫描雷达所获 “ 距 离与方位 ” 的大量 数据组 中抽取有用 数据。第二步是进行安全危险判定 , 即判断追尾碰撞的危 险程度 。 2 雷 达 防碰 撞 装 置 车辆行驶 路径是根据后 面的汽车 动力学特征 , 如 车速 、 转 向角及 雷达是利用 目 标对电磁波的反射来发现 目标并测定其位置的。 横 向摆动速率等来估算 的。 2 . 1 雷达系统的组成及工作原理 。 雷达的组成及简单工作原理如 根据路 面状 况 、 后 面车速及 相对 车速 , 计 算 出“ 临界 车 间距 离” , 该值 是由路径估算方法确定的车间距离的微分值 。 判 定安全, 图1 所 示 危险 的方法 , 就是将 实际测量的车间距离与临界车 间距 离进 行 比 较 。在临界车间距离非常接近实 际测量 的车间距 离的某一时刻 , 报警器发出警告信号 。当临界车间距离等于或小于实际测量 的车 间距离时 , 自动制动控制系统启动 。 3 . 3 带有 自动制动操作机构 的车辆控制 。由安全, 危险预警 信号 控制 的 自动制动操 作机构 , 配有 防抱死 制动 系统 , 并 采用高 速电 图1 雷达 的 组 成及 简单 工作 原 理 磁 阀进行纵 向加速度反馈控制 。该 自动制动操作机构的优点是 , 如果驾驶员 的脚 制动力大于 自 雷达工作 时 , 定时器触发调制器 , 调制器 产生调制脉 冲 , 使振 当 自动操作机构处于工作状态 时 , 那么驾驶员 的脚制动力有效 。一旦 自动 荡器产生大功率脉冲信号经 天线 向空 间辐射电磁波。在天线控制 动制动控制 的前动力 时, 脚 制动系统并 不受影响 , 由于采用液压 制动 系统 的作用 下 , 天线波束按规定 方式在空 间扫描 。若 电磁波遇到 制 动操作机构失灵 , 目标 , 则 目标反射 回来 的回波信号经 天线 接入接 收机 , 在通 过信 分泵 , 不会使两液压 回路之间产生压差 。 号处理后 , 最后送到终端设备 , 得 到 目标 的坐标工作原理。 通过试验使用表 明, 这 种基于汽车间 的距离 、 相对速度 、 后面 2 . 2 电磁波雷达 防撞装置 。在 汽车行驶过程 中 , 当发射机采用微 车辆 的速度及道路状 况等信息建立 的安全/ 危险情况 判定法 , 不仅 波调频连续波体 制发射 电磁波时 , 雷达窄波束 向前发 射调频连续 可避免与前 面暂停车辆或停驻 车辆 的追尾碰撞 , 而且还 能防止与 波信 号。当发射信号遇到 目标时 , 被反射 回来 的电磁 波被 同一天 前 面实施紧急制动的车辆之 间的追尾碰撞 。这个系统在保护乘客
汽车防追尾系统设计分析
引 言
自 2 纪 6 代 以来 , 车 技 术 已经 步 人 了 0世 0年 汽
键 的 因素之 一 。 它是 汽车 速度 为 u时 , 驾驶员 开 始 从 操 纵制 动控 制装 置 ( 动 踏板 ) 制 到汽 车完 全停住 所驶
f me ,a d t e h h o y o e t c n q e o e l s rd s l c me t e s ri n lz d-f a l h o sb l y fra p yn t n t e r a d n h n t e t e r f h e h i u f h a e ip a e n n o sa a y e t t s i l t e p si i t p li g i i h n y i o a e ft e C l s n S se i s e t i e . r a o h o l i y tm sa c ran d io
( oay1 7 T tl 9 ) l
汽车 防追尾系统 设计分析
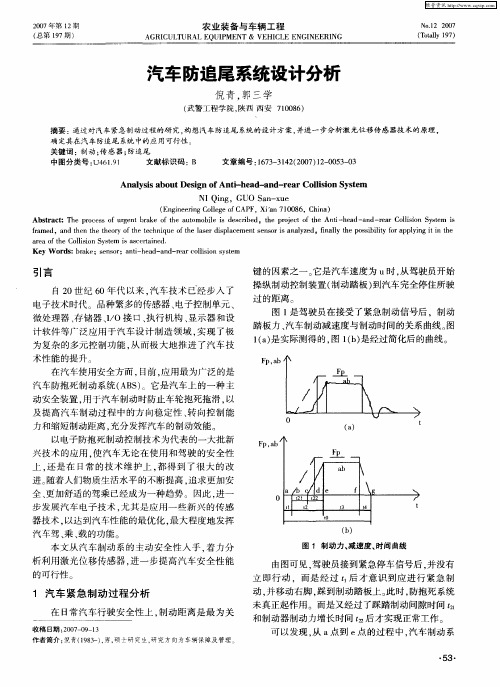
倪青 , 郭三学
( 武警 工程学院 , 陕西 西安 70 8 ) 10 6 摘要 : 通过对汽车紧急制动过程 的研 究, 想汽车防追尾 系统的设计方案 , 构 并进一 步分析激光位 移传感器技 术的原理 , 确 定其 在 汽 车 防追尾 系统 中的应 用可 行性 。
维普资讯
20 第 1 07年 2期
农 业装 备与 车辆 工程
A I U T R LE UP N GRC L U A Q IME T& V HIL N I E R N E C EE G N E I G
汽车防追尾的车辆识别系统设计
摘
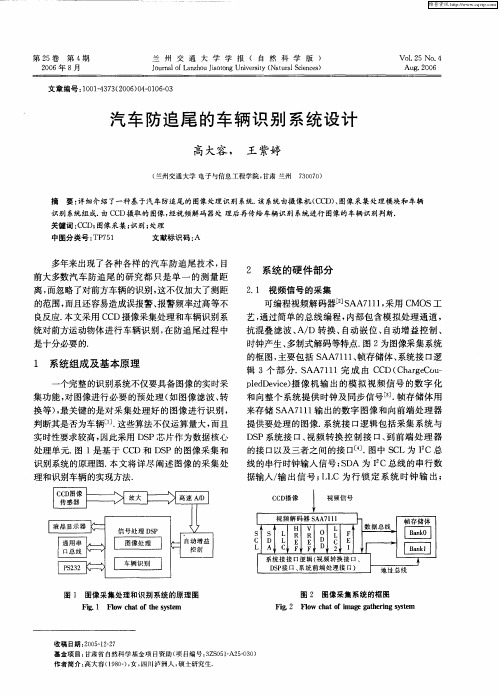
要: 详细介 绍 了一种基于汽车防追尾的 图像处理识别 系统. 系统 由摄像 机 ( C 、 该 C D) 图像 采集处理模块 和车辆
识 别 系统组 成. C D摄取 的 图像 , 由 C 经视频 解码 器处 理 后再传给 车辆识别 系统进行 图像的车辆识别判断.
关 键 词 : C 图像 采 集 ; 别 ; 理 C D; 识 处
理 和识别 车辆 的实 现方法 .
据输人/ 出信号 ; l 输 I C为行 锁定 系统 时钟输 出;
CD C 摄像 I 视频信号
地 址 总线
图 1 图像采集处理和识别 系统 的原理 图
F g Flw a f t e s se i.1 o d1 t y t m o h
良反应. 本文采用 C D摄像采集处理和车辆识别 系 C
可编程视频解码器[S A l1采用 C S 。 A 7l, ] MO 工 艺, 通过简单 的总线编程, 内部包含模拟处理通道 , 抗混叠滤波 、 / A D转换 、 自动嵌 位、 自动增益控制 、 时钟产生、 多制式解码等特点. 2 图 为图像采集 系统 的框 图, 主要包括 S 7 1、 AA 1 1帧存储体、 系统接 口逻 辑 3个 部 分. A 7 1 完 成 由 C D( hre o — S A 11 C C agC u peD v e摄像机 输 出的模 拟视频信号 的数 字化 l ei ) d c 和 向整个 系统提供时钟及 同步信号=. 3 帧存储体用 ] 来存储 S 7 1 输 出的数字 图像和向前端处理器 AA 11 提供要处理 的图像. 系统接 口逻辑包括采集 系统与 D P系统接 口、 S 视频转换控 制接 口、 到前端处理 器 的接 口以及 三者 之 间的接 口[. 中 S L为 lC总 4 图 ] C 。
一种汽车开门主动防撞预警装置的设计与研发
一种汽车开门主动防撞预警装置的设计与研发随着汽车的普及,交通事故也随之增加,其中一个常见的事故类型就是开车门时与其他车辆发生撞击。
这种事故不仅会造成车辆损坏,还可能导致人员伤亡。
为了解决这一问题,我们设计并研发了一种汽车开门主动防撞预警装置,旨在提高车辆开门安全性,减少交通事故的发生。
一、设计思路我们的设计灵感来源于现有的车辆倒车雷达和预警系统,通过雷达技术检测车辆周围的距离和速度,从而提前预警可能发生的碰撞。
我们将这一技术应用在汽车开门的安全性设计中,通过在车辆侧面安装雷达和预警系统,实时监测车辆周围的环境和动态,当检测到潜在的碰撞危险时,系统会发出警报并通过闪烁灯光或声音提醒车辆内的乘客,从而避免开门时与其他车辆发生碰撞。
二、技术实现1. 雷达检测技术我们选用先进的雷达检测技术,通过在车辆侧面安装多个雷达传感器,实现对车辆周围环境的全方位覆盖。
这些传感器能够精准地检测周围车辆和障碍物的位置、速度和距离,从而实现对潜在碰撞危险的及时预警。
2. 数据处理和分析通过对雷达传感器获取的数据进行处理和分析,我们可以准确地判断车辆周围环境的情况,包括车辆的距离、速度和方向等信息。
在系统内部设定一定的碰撞危险阈值,当检测到距离和速度等数据超过设定阈值时,系统会自动触发预警机制。
3. 警报方式预警系统可以通过声音、闪灯等方式向车辆内的乘客发出警报。
在检测到潜在碰撞危险时,系统会立即发出响亮的警报声,同时闪烁车辆侧面的灯光,提醒车辆内的乘客注意可能的危险情况。
三、产品特点1. 主动预警与传统的被动防撞系统不同,我们的设计是一种主动预警装置,能够在车辆未发生开门动作时就能够探测到潜在的碰撞危险,并及时发出警报。
这种主动预警机制能够大大提高车辆开门的安全性,减少交通事故的发生。
2. 多传感器全方位监测3. 易安装和兼容性强我们的预警系统设计紧凑,安装方便,可轻松应用于各种车辆类型。
我们的系统还具有较强的兼容性,可以与车辆原有的安全系统进行无缝接口,不会对车辆原有的功能产生影响。
汽车智能防撞系统
汽车智能防撞系统汽车智能防撞系统是指一套基于现代计算机技术和感知技术,能够在汽车行驶过程中实时监测道路情况,预测潜在危险,并采取相应措施避免碰撞的系统。
它是车辆主动安全系统的核心部分,能够大大提升驾驶者和乘客的安全性。
汽车智能防撞系统主要由传感器、控制单元和执行器三部分组成。
传感器主要用于收集道路和车辆信息,包括雷达、摄像头和激光雷达等。
控制单元负责处理传感器所获得的信息,并进行危险预警和预测,确定合适的措施来避免碰撞。
执行器则根据控制单元的指令,控制车辆的刹车、转向等动作以避免碰撞。
汽车智能防撞系统基于现代计算机技术和人工智能技术,能够准确判断道路情况和潜在危险,比如前方车辆的距离和速度、行人的位置等。
当系统判断存在碰撞危险时,会通过警报和报警器提醒驾驶者,同时自动采取控制措施,如自动刹车或自动转向等,保证车辆安全。
汽车智能防撞系统的效果在很大程度上取决于传感器的准确性和敏感性。
现代汽车智能防撞系统采用多种传感器的组合,以提高系统的准确性和可靠性。
激光雷达可以提供非常精确的距离测量,摄像头可以识别车辆和行人,雷达可以检测周围车辆的速度和方向等等。
这些传感器通过数据融合技术,将各自的信息进行整合和处理,得出最终的判断结果。
随着智能科技的不断进步,汽车智能防撞系统越来越智能化和自动化。
近年来出现了基于人工智能技术的自主驾驶汽车,这些汽车通过深度学习等技术,能够实现全自动驾驶,进一步提升了驾驶安全性。
汽车智能防撞系统是通过集成多种传感器和计算机技术,提供实时监测和预警服务的系统,能够大大提升驾驶者和乘客的安全性。
随着科技的进步和智能化水平的提高,汽车智能防撞系统的功能将会不断升级,为驾驶者带来更加安全和便利的驾驶体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
獭瓣鳓辆蘸i簿篱藤豢蔓袋≤藜≥‘≤蒜藕:藩辫羚尘二兰兰鎏垦垦垦鱼垦
汽车防追尾和防侧撞安全系统设计
高俊祥1。高孝亮2,陈斐彪1
(1.湖南财经工业职业技术学院,湖南衡阳421002;
2.湖南交通工程学院,湖南衡阳421001)
高俊祥
摘要:汽车追尾和侧撞是交通事故的主要表现形式,本文从汽车主动安全技术角度出发,设计了汽车防追尾和
防侧撞安全系统。在汽车行驶过程中遇到追尾和侧撞危险时,根据驾驶员有无避让动作,启动自动防御系统。
关键词:汽车追尾;侧撞;预防;安全系统
中图分类号:U463.522
文献标识码:A
文章编号:1003—8639(2015)11枷23—02
Design
of
AntiCollision
Safety
System
GAOJun—xiang’,GAOXiao-lian92,CHENFei—bia01
(1.HunanFinacialandIndustrialVocationalTechnicalCollege,Hengyang421002,China;
2.HunanInstitute
of枷C
Engineering,Hengyang
421001,China)
Abstract:Ananticollisionandside
impactsafetysystemisdesignedherefromtheangle
ofvehicle
active
safetytechnology.Whenthecollisionandsideimpactdangers
Occur,theautomaticsafety
system
will
judge
tostart
according
to
thedriver,Savoidanceaction.
Keywords:collision;side
impact;prevention;safety
system
随着人们生活水平的提高。汽车普及率也越来
越高,与之相应,交通事故也越来越多。(2014年国
民经济和社会发展统计公报》指出,2014年汽车交
通事故死亡人数相对2013年增长率为8.5%,相比
2012年增长率为13.46%,相I:L2011年的增长率为
15.78%。可见,近些年来,我国交通事故死亡人数
呈逐年小幅度上升趋势[1]。
对大量交通事故的分析表明,80%以上的车祸
是由于驾驶员反应不及时引起的.车辆相撞事故中属于追尾相撞的超过65%。其余则属于侧面相撞和正面相撞12]。所以设计一种实时、可靠、适应性好的车辆防碰撞系统是为提高车辆行驶安全而采用的非常重要的技术措施。1防碰撞安全系统设计1.1原理设计车辆防碰撞系统在汽车有追尾碰撞和侧面碰撞危险时,能立刻发出报警信号,警示驾驶员及时采取处理措施.并在驾驶员无避险操作的时候自动启动制动系统,避免发生交通事故。系统原理见图1。整个系统由传感器单元、中央处理单元以及信息输出单元构成。传感器单元收集车辆的内外环境信息,包含车辆上的各种传感器;中央处理单元用震惫翥速卜——◆咖主掣慧染油门卜——◆昏控处理盥憋要凛嘉粪H豁151卜兀e雷达测距传感器117l接l’r,图1系统原理于评估车辆行驶的安全状态.由信息采集单元与主
控制单元组成;信息输出子系统为驾驶员提供汽车
行驶的安全状态信息,由声光报警模块与显示模块
组成。
汽车防撞安全系统的工作原理:利用安装在汽
车前保险杠上和两侧的雷达传感器实时测量自车与
前方目标物间及自车与两侧面目标物的距离和相对
速度等信息,传送至信息采集单元;利用霍尔传感
器获得的车速信号,输出至信息采集单元进行车速
计算;制动、油门位置及路面附着系数也输入至信
息采集单元;各种传感器信息经信息采集单元处理
后,传送至主控制单元;主控制单元实时判断行车
安全状态,发出相应的报警信号,警示驾驶员采取
措施或系统自动采取措施。
汽车追尾时,系统采用两次报警的方式.如果
收稿日期:2015—10-09;修回日期:2015—10—13
基金项目:“湖南省教育厅资助科研项目”《汽车主动安全技术应用研究》论文,项目编号:12C0979。
作者简介:高俊祥(1972-),男,湖南衡阳人,副教授,研究方向为汽车安全技术,E-mail:qwe一9981@163.corn。
<汽车电器>2015年第”期∞
万方数据
实际测量间距小于危险报警距离,为危险报警状
态,红灯闪烁,产生短间隔报警音,要求驾驶员紧
急制动或自动制动;如果实际测量间距大于提醒报
警距离,为安全行车状况,绿灯亮、无报警音;如
果实际测量间距小于提醒报警距离而大于危险报警
距离,为提醒报警状态,黄灯闪烁,产生长间隔报
警音,提醒驾驶员需要松开油门踏板。汽车侧撞时,系统采用一次报警方式。1.2制动距离的计算为了保证绝对安全,自车制动停止后,两车之间应保持一定的安全间距磊。如越大,系统的虚警率越高;越小,系统的安全保障能力越小。如的取值因驾驶员的驾驶风格而异,国内外的资料一般选取为2~5in,为了保证系统的安全性,本系统取最大值5m。1)危险报警距离计算公式..2前车静止时:db-旦+O.知l+52口.,2前车加速或匀速运动时:以=掣+0.知d+52a前车减速运动时:db_坠坐掣+0.1(vj蜘reI)+5Zo2)提醒报警距离巩计算公式前车加速或匀速运动时:dw=db+Vd前车静止或减速运动时:dw=d一。上述公式中:秽,——自车速度;秽广前车或侧车速度;秽d——相对速度;r本车加速度。1.3相对距离和相对速度的测量车前及两侧采用毫米波雷达来作为测量传感器。毫米波雷达㈨的工作频率在30~300GHz,波长短,频率高,抗干扰性强,测距性能稳定,受对象表面和颜色的影响小.可以全天候工作,不受天气状况的影响.环境适应性能好,能精确地测量目标的距离和相对速度,并且雷达的外形尺寸很小,便于在汽车上安装。毫米波雷达有调频连续波(FMCW)和脉冲雷达两种.汽车毫米波雷达系统一般采用结构简单、成本较低、适合作近距离探测的调频连续波雷达方式。2自动制动系统的设计当实际测量间距小于危险报警距离,且信息采集单元没有检测到驾驶员的减速或制动信号时,主控单元自动启动制动系统。制动系统由制动伺服电机、齿轮齿条传动机构、液压缸等组成。主控单元输出的开关量,负责接通制动伺服电机,扭矩传感器将获得的扭矩大小转换成电压数字量,传送给伺服电机。伺服电机的角位移经齿轮齿条传动机构变成制动液压缸的位移,进而得到相应的制动力矩,攀{懒}2015年第11期完成自动制动任务,自动制动原理见图2。图2自动制动原理在车辆不同的负载和车速条件下.力矩传感器
输出的电压大小也不一样,伺服电机的角位移随之
变化,液压缸产生的压力大小就会不同,制动器就
能得到所需对应的制动力矩,实现最佳的制动效果。
3小结
汽车防撞安全系统设计主要针对追尾和侧撞的
情况,不针对倒车情况(因为车速较低,且驾驶员
注意力集中,危险系数较小)。本防撞安全系统在
出现追尾和侧撞危险报警时。优先采用人工制动,
只有在人工制动失效的情况下,自动制动系统才会
启动,并且能根据汽车不同的载荷和车速选择相应
的制动力矩,改善了制动效果。
系统测试以东风雪铁龙C4L1.6THP劲智版为试
验车型,该车最大扭矩240Nm。系统采用上海汽车
电子工程中心研制的SAE一100型毫米波雷达,工作
频率35GHz,毫米波雷达的探测距离在100in以上,
探测宽度为3.5nl,探测幅度为3Ill,与道路的升降
相对应。主控单元采用美国ATMEL公司生产的低电
压、高性能CMOS8位单片机AT89C52,它有40个
引脚,32个外部双向输入/输出(I/0)端口,可以
按照常规方法进行编程。也可以在线编程。遇到追
尾危险时,两次报警完备,侧撞一次报警,自动制
动系统的反应距离为0.5ITI。制动力矩与载荷和车速
相对应,制动效果良好。
参考文献:
[1]2014年全国道路交通事故数据统计[EB/OL].http://
WWW.peichang.cvJdetail/id2737.html,2015—03—13.
[2]车辆主动防碰撞控制系统设计[EB/OL].http://wenku.
baidu.com/link?url=yV2LCCLR5sPqXZsgvzr.,jNfPuSj5Y
txunj9pzkT92PdUw9一KKYl一G9QSboel7NqqYNSxp76Y3
ak4yZGz99bbVRmPxYklGCmZB8YdXfYq,2012—12—05.
[3]韩天龙.现代汽车防追尾系统研究[J].机电工程技术,
2008,37(8):76—78.
(编辑文珍)
万方数据