带钢卷取机跑偏电液伺服控制系统的仿真
基于Simscape的电液伺服阀建模与仿真分析
基于Simscape的电液伺服阀建模与仿真分析摘要:电液伺服阀是典型的机电液一体化产品,其机械、液压、电磁等子系统的原理构成都很复杂。
为避免采用多软件联合仿真易出现的接口复杂等问题,利用MATLAB软件的拓展模块Simscape在同一的平台上对伺服阀进行多领域建模仿真。
以常见的力反馈式两级电液伺服阀为例,介绍其结构组成及工作原理,利用软件对各子系统建模,建立了开环液压控制系统,依据国外某标准产品设置参数,对其进行动态仿真,分析伺服阀各环节的动态特性。
结果表明所建模型能较好的反映出伺服阀的动态特性,为伺服阀的优化设计提供了新思路。
关键词:电液伺服阀;多领域建模;喷嘴挡板;液动力0引言电液伺服阀作为电液伺服控制系统的核心元件,最为普遍的两级力反馈式电液伺服阀的组成包括力矩马达、前置级喷嘴挡板阀和功率级滑阀等,各子系统的原理构成很复杂。
传统的机电液一体化系统仿真的接口技术复杂,多个程序同时占用计算机资源,且必须保证各仿真程序同步并行运行,其仿真过程复杂耗时,且易出现仿真软件的兼容性问题[1]。
运用Simscape软件,针对其结构原理,在统一平台上建立子系统模型,并构建简单伺服阀开环控制系统,依据国外标准伺服阀的参数来设置模型进行仿真。
1工作原理两级力反馈式电液伺服阀的前置级液压放大器是由永磁动铁式力矩马达控制的双喷嘴挡板阀,功率级液压放大器为三位四通滑阀,利用反馈杆将阀芯与衔铁挡板组件连接,组成滑阀位移力反馈回路,结构原理如图1所示。
在没有控制电流输入的情况下,弹簧管将衔铁托起在两块导磁体之间,挡板位于两个喷嘴之间,由于发奎干小球的约束条件下使滑阀的阀芯停在中间位置,此时,伺服阀不存在液压输出[2];当控制电流为差动控制电流Δi=i1-i2输入的情况下,使得衔铁上能够产生与顺时针方向相反的电磁力矩,进而驱动衔铁挡板组件以弹簧管转动中心为基准向逆时针方向偏转,迫使弹簧管以及反馈杆发生形变,使得挡板位置发生变化,进而使得喷嘴挡板阀的间隙由两侧相等变为右小左大,最终导致滑阀腔右侧压力p2p升高,左侧压力p1p降低,使得推动滑阀阀芯向左侧运动,进而推着反馈杆上的小球向做侧滚动,加剧反馈杆的形变。
浅论热轧带钢卷取钢卷的卷形控制
浅论热轧带钢卷取钢卷的卷形控制浅论热轧带钢卷取钢卷的卷形控制仲昭平(⽇照钢铁有限责任公司,⼭东⽇照276806)摘要:针对热轧钢带卷取成型过程中产⽣的钢卷不良问题。
从⼯艺过程和控制过程对各种形态的塔形产⽣的机理进⾏了分析。
以提⾼钢带卷⼀次成材率提⾼热轧钢带卷直发率为⽬标提出并实施应⽤新的控制思想和⽅法。
关键词:卷取;塔形;原因分析;改进控制;Abstract : Thetelescoping problens with coiling hot rolled strip steel are conce rned with in the article。
the formation mechanism of various telescopes are elucidated in terms of the processes and controls employed in coiling and a new control method is propose and put into USE , in order to increase the primary acceptance rate of hot 2rolled strip coil , and to maximize its direct 2delivery rate。
Finally 。
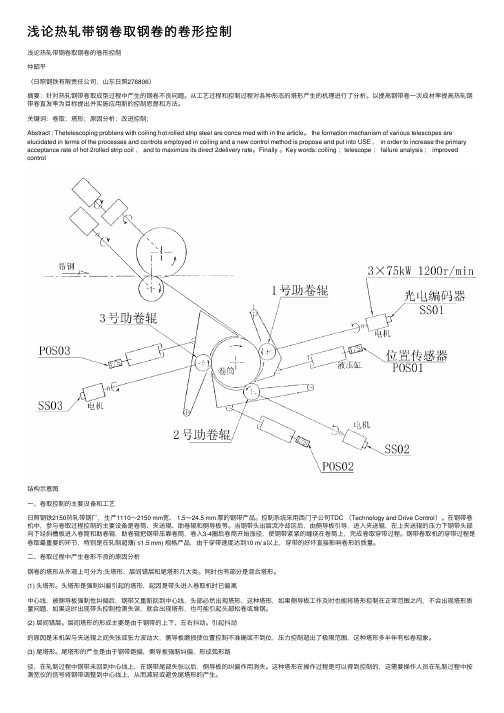
Key words: coiling ;telescope ; failure analysis ; improved control结构⽰意图⼀、卷取控制的主要设备和⼯艺⽇照钢铁2150热轧带钢⼚,⽣产1110~2150 mm宽、 1.5~24.5 mm 厚的钢带产品。
控制系统采⽤西门⼦公司TDC (Technology and Drive Control)。
在钢带卷机中,参与卷取过程控制的主要设备是卷筒、夹送辊、助卷辊和侧导板等。
当钢带头出层流冷却区后,由侧导板引导,进⼊夹送辊,在上夹送辊的压⼒下钢带头部向下经斜槽板进⼊卷筒和助卷辊,助卷辊把钢带压靠卷筒,卷⼊3-4圈后卷筒开始涨径,使钢带紧紧的缠绕在卷筒上,完成卷取穿带过程。
热轧带钢卷取机的卷取控制方法及其发展
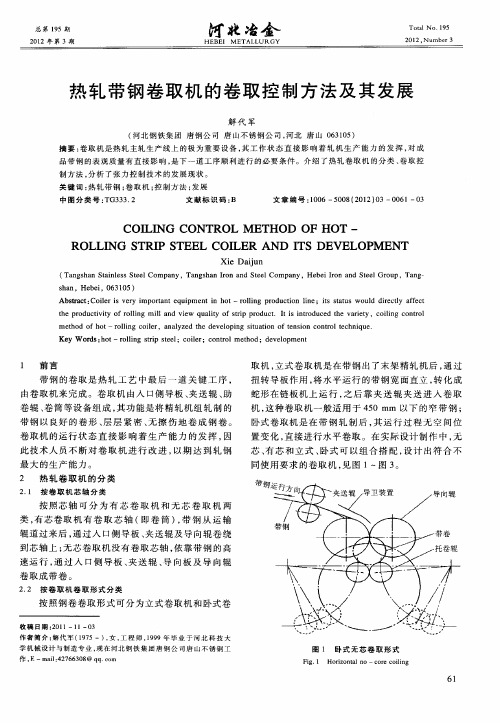
F g. Hor on a o e c ie i 2 i z t lc r o l r
力控 制 的负 面影 响 , 间接 张 力 和 直 接 张力 的有 机 是
结合 。
间接 张力 控制 稳定 性好 , 精度 低 、 在 稳 态误 但 存
间距 、 带钢 的金 属 变 形 弹力 系 数 和 卷 径 等有 关 。带
直 接 张力控 制 系统是 将 张力计 测 量 出的 实 际张 力值 反 馈 到输入 端 , 形成 张力 负反 馈 , 通过 张 力调 节 器对 张 力进 行 控 制 , 是一 种 闭环 控 制 系 统 。与 间接
6 2
3 4 张 力 控 制 技 术 的 发 展 现 状 .
3
卷 取 控 制 方 法
在 轧制 过程 中 , 了保证 稳定 的轧制 , 钢 的卷 为 带
取 是依 靠一 定 的张 时 , 以得 到 好 的卷 形 , 不会 错 边 , 不 会 形 可 既 也 成塔 形 , 不会 划伤 带钢 。在 我 国轧 钢生产 中 , 更 目前 广泛 采 用 的张力 控 制方法 有 间接 张力 控制 和 直接 张 力控 制 , 绝大 多数 是 采用 间接 法进 行张 力控 制 。 且 近 年来 , 结合 直 接 和 间接 的复 合 张 力 控制 方 法 也 逐
COI NG LI CONTROL ETHOD M oF HoT — ROLLⅡ S G TRI S P TEEL COI LER AND TS DEVELOP ENT I M
Xi i n eDai u
( a gh nSane sSe lC mp n T n s a tils te o a y,T n s a rn a dSe lC mp n a gh nIo n te o a y,He e r na d Se l o p,T n — b i o n te Gr u I a g
卷取机的卷形控制参数优化

中不存在这种理想的情况 , 带钢头部在建张 以前要么就是跑向一侧 , 要么就像蛇一样在 层冷辊道在层冷上左右来 回窜动。下面根据 两张卷取实拍图图 3 做卷形分析便可知。
加 载前 的短 行程关 闭 的位 置控 制和 加载后 的 压 力关 闭控 制 。在 位 置控 制 的 时 候 , 统 会 系 根据 现 场情 况进 行 自动补 偿 零 调 , 正 常 补 在
取机夹送辊前侧导的控制对于卷取机卷型有
很 大的影 响 。适 当的参数 设定 不但 能减 少堆
钢, 而且能改善卷形。
卷取机 的卷形控制参数优化
一
炼轧 厂 余
摘 要
斌
在 C P热 轧线上 , S 钢卷的卷形与卷取机侧导板的控制有着 密切的联 系, 本文从侧导 控制顺 序上 寻找改善卷形 的控制办 法 , 从而改善钢卷卷形。
ห้องสมุดไป่ตู้
1 引言
对 于常规 C P热 轧 线 的卷 取机 来 说 , S 卷
的时候投入 2个伺 服阀, 其他动作一般使用 1 个伺服阀即可满足要求。 侧 导控制 模 式 分 为 2种 , 1种 是 卷 取 机
( 带钢 宽 度 +B) 的位 置 。
图 1
e在卷取 机 夹 送 辊检 测 到加 载 信 号 后 , . 卷取机侧导执行第二次短行 程关闭 , 闭到 关 带 钢 宽度 的位 置。
侧导每侧 由 2个油缸并联组成 , 中间有
机械连接轴保证 2个油缸同步动作 , 油缸的 活塞侧和杆侧各装有一个压力传感器 , 用于 检测压力 ; 另外还安装了 M S T 公司的高精度 位置传感器用于实现位置控制 。侧导每侧油 缸配有 2个 伺服 阀 , 高 速 1 短 行 程 关 闭 在 次
带钢卷取助卷辊的人工智能和模糊技术控制实现

图 1 跳 跃量 控制 程序 图 图 中 ,设 定位 移 x是 助 卷 辊位 移 量 ( 跃 量 ) ,即 6 Z i 跳 +k6,换 算成 助 卷 辊 绕 支 臂 支 点 轴 摆 动 的 弧长 ,输 入 指 令 电位 器 。 反馈 分 为 位 置 ( 跳 跃 )反馈和 压 力反 馈 , 由磁 尺 ( 置传 感器 )和 压力 传感 器完 成 。 位 必须 经 常测量 助 卷辊 与 卷筒 在零 位 和其 它位 置 时的 间隙 ,修 正设 定 的 位 移 量 。影 响 因素 有辊 子 外径 磨 损 ,支 臂使 用 后微 量变 形 ,支 臂 转动 轴承 抬 起 、辊 缝 调整 、带 钢 末 端 抬起 ,甩 尾压 下控 制 、手动 控 制 、 自动校 准 功 能模块 、涨 径控 制模 块 , 由功 能选 择模 块进 行
选 择控 制 。 2 3 压 力 自动控 制 。对 液压 卷取 机来 说 , 当助卷 辊 压紧 带钢 进行 卷取 .
V . 6 O。
有 相 应 的直 接测 量 压 紧力 的传 感元 件 ,因此 压 紧力 只 能利用 液 压油 的 油压 间接 测 量 。液压 油 的油 压和压 紧 力之 间 的数值 转换 关系 由数 学模 型给 出 。
恒 压力 控制 系 统 的主 要 功能 :
2控 制系 统 的实现
自动跳 步控 制是 带钢 热连 轧 机 的一个 创 新的 控制 功 能 ,它完 成 了位 置 环 与压 力 环的 双环 切换 ,减 小在 卷取 时 由于 带头 和 助 卷辊 相撞 而 在 带钢 上 产 生 的压 痕 .有赖 于助 卷 辊 的径 向运 动控 制 采用 具 有 高响 应 性的 液压 伺 服 控 制系 统 , 以及 精 密 的带 头 检测装 置 和 准确 的数 学 模 型。 有助 于 优化 整 个 卷 取控制 系统 , 改善 系统 的品质 ,进 一步提 高带钢 成 品质 量 。A C J 控制 系统 包 括带钢 头尾 跟踪 、助 卷辊 位置 控制 和压 力控 制 。 2 1带钢 头 尾跟 踪模 块 。 自动跟 踪计 算 带钢 位 置并给 电气控 制 发送信 . 号 。每 个助 卷辊 都 装有 位 置和 压力 控 制器 ,在带 钢 卷取 过程 开 始后 ,每 当 带钢 头 部转 到距 离 任_。 辊 很近 的 位置 时 ,该 助 卷辊 都迅 速 抬起 ,和带 助卷 钢 脱离 接触 :而 当 带钢 头 部通 过助 卷 辊后 ,该助 卷 辊则 迅速 回靠 以压 紧卷 筒上 的 带钢 ,并 按压 力 控制 方 式运 行 。该 过程 将 持续 到 卷取 若 干 圈后 全部 助卷 辊 打开 为止 。 良好 的踏 步控 制 系 统应 在保 证 带钢 头 部不 与 助卷 辊 相撞 的前 提下 ,尽可 能缩 小助 卷 辊和 带钢 脱离 的时 间 ,使卷 形 不受影 响 。
《2024年UCM冷连轧机薄带钢轧制板形控制的研究及有限元仿真》范文
《UCM冷连轧机薄带钢轧制板形控制的研究及有限元仿真》篇一一、引言随着现代工业的快速发展,冷连轧机在钢铁生产中扮演着越来越重要的角色。
尤其对于薄带钢的生产,轧制过程中的板形控制成为影响产品质量的关键因素。
UCM冷连轧机作为一种先进的轧机设备,其轧制板形控制技术的研究及仿真分析具有重要的现实意义。
本文将重点探讨UCM冷连轧机在薄带钢轧制过程中的板形控制技术及其有限元仿真研究。
二、UCM冷连轧机板形控制技术研究2.1 轧制过程基本原理UCM冷连轧机通过连续轧制工艺,实现对薄带钢的精准轧制。
在此过程中,板形控制技术的关键在于控制轧制过程中的力、速度、温度等参数,以保证轧制出的带钢具有理想的板形。
2.2 板形控制技术分析板形控制技术主要包括厚度控制、宽度控制和形状控制三个方面。
在UCM冷连轧机中,通过精确的液压系统、控制系统和机械系统,实现对轧制力的精确控制,从而实现对板形的有效控制。
此外,通过调整轧辊的凸度、倾斜度等参数,也可以有效地改善带钢的板形。
三、有限元仿真研究3.1 有限元法基本原理有限元法是一种有效的数值分析方法,可以用于模拟复杂工艺过程中的力学行为。
在UCM冷连轧机的板形控制研究中,通过有限元法可以模拟轧制过程中的应力、应变、温度等物理量的变化,从而为优化轧制工艺提供依据。
3.2 仿真模型建立建立仿真模型是有限元仿真的关键步骤。
在UCM冷连轧机的仿真模型中,需要考虑到轧机的结构、轧辊的材质和几何形状、轧制力、摩擦力等参数。
通过合理的模型简化,建立出能够反映实际轧制过程的仿真模型。
3.3 仿真结果分析通过有限元仿真,可以得到轧制过程中带钢的应力、应变、温度等物理量的分布情况。
通过对仿真结果的分析,可以了解轧制过程中带钢的变形行为,从而为优化轧制工艺提供依据。
同时,通过对比仿真结果和实际生产数据,可以验证仿真模型的准确性,为进一步优化轧制工艺提供支持。
四、实验验证与结果分析为了验证UCM冷连轧机板形控制技术的有效性和有限元仿真的准确性,我们进行了实验验证。
电液伺服解决方案(3篇)
第1篇一、引言随着现代工业自动化技术的飞速发展,电液伺服系统在各个领域的应用越来越广泛。
电液伺服系统以其高效、精确、稳定的特点,在航空航天、汽车制造、数控机床、机器人等领域发挥着重要作用。
本文将详细介绍电液伺服系统的原理、组成、工作原理、应用领域以及解决方案。
二、电液伺服系统原理电液伺服系统是一种将电气信号转换为液压或气压信号,进而驱动液压或气压执行元件运动的控制系统。
它主要由电气部分、液压部分和执行部分组成。
1. 电气部分:主要包括电源、控制器、传感器等。
电源为系统提供能量,控制器根据传感器采集到的信号进行计算、处理,生成相应的控制信号,传感器用于检测执行元件的位置、速度、压力等参数。
2. 液压部分:主要包括液压泵、液压阀、液压缸等。
液压泵为系统提供液压油,液压阀用于控制液压油的流向和流量,液压缸将液压能转换为机械能,驱动执行元件运动。
3. 执行部分:主要包括液压缸、伺服电机等。
液压缸将液压能转换为机械能,驱动负载运动;伺服电机用于驱动液压泵或液压阀,实现系统的闭环控制。
三、电液伺服系统组成1. 伺服阀:伺服阀是电液伺服系统的核心部件,它将电气信号转换为液压信号,实现对液压缸或液压马达的控制。
伺服阀主要由电磁阀、伺服阀芯、反馈元件等组成。
2. 液压缸:液压缸是电液伺服系统的执行元件,将液压能转换为机械能,驱动负载运动。
液压缸有缸筒、活塞、活塞杆、密封件等组成。
3. 伺服电机:伺服电机用于驱动液压泵或液压阀,实现系统的闭环控制。
伺服电机有交流伺服电机、直流伺服电机等类型。
4. 控制器:控制器是电液伺服系统的核心部分,它根据传感器采集到的信号进行计算、处理,生成相应的控制信号。
控制器有模拟控制器、数字控制器等类型。
5. 传感器:传感器用于检测执行元件的位置、速度、压力等参数,为控制器提供反馈信号。
传感器有位置传感器、速度传感器、压力传感器等类型。
四、电液伺服系统工作原理电液伺服系统的工作原理如下:1. 传感器检测执行元件的位置、速度、压力等参数,并将信号传输给控制器。
冷轧酸洗-镀锌铝镁机组立式活套带钢跑偏控制技术

冷轧酸洗-镀锌铝镁机组立式活套带钢跑偏控制技术摘要:在冷轧高速带钢加工设备的生产线上,立式活套是缺一不可的关键部分,也是确保设备能够以良好的工艺性能持续工作的关键基础。
随着带钢生产线运转效率的的提升,钢铁企业对带钢跑偏能力的要求也愈来愈大,为防止跑偏,在设计中需要合理把握好生产设备轴线上各台装置的水平点与垂直角度。
本文主要根据冷轧酸洗-镀锌铝镁机组的立式活套带钢跑偏情况,研究了冷负荷试验过程中立式活套区域存在的带钢跑偏原因,制定出合理有效防止立式活套带钢跑偏的安装控制技术。
这项工艺技术有针对强、检测准确度高、实用价值强,能有效地克服带钢段在长距离生产线中立式活套区段的跑偏现状。
关键词:冷轧厂;酸洗-镀锌铝镁机组;立式活套;带钢跑偏;控制技术;在冷轧设备,特别是在超大型高速的带钢处理设备中,立式活套是不可或缺的关键组成设备,是确保设备能够以正常的操作速度连续完成的关键条件。
一般低温冷轧工艺中,在连续带钢处理设备中的进、输出段,一般都设置立式活套设备以保存带钢,以确保在开卷机与卷取机之间的换卷运行过程中,采用活套的"充套"和"放套"作业的方式轮流完成,使得机组保持稳定的生产。
随着冷轧带钢工厂速度的不断提高,钢铁厂对带钢跑偏控制系统需求也愈来愈高,因此想要控制系统跑偏,在设计时就需要有效掌控好线路上各台机械设备的平行度和垂直。
立式活套由于其产品自身的特点,其辊子的装配精度一般都是在制造厂完成监控,但是由于各种因素如监造不到位、运输变形、上下车装卸碰撞等,导致活套小车等装置辊子的准确度得不了保障,从而导致在穿带冷载荷调试阶段带钢发生跑偏的现象,从而直接影响机组正常连续的生产。
本文以河北太行钢铁ESP二期冷轧工程酸洗-镀锌铝镁机组立式活套安装工程为例,针对冷轧立式活套带钢跑偏现象,分析了冷负荷工作中带钢和立式活套部分发生走偏的几种情况,并制定出合理有效防止带钢跑偏的安装控制技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
带 材跑偏 检测 器用 来检 测带 型材 料在 加工 中偏
离正 确 位置 的大小 及方 向 ,从而 为 纠偏控 制 电路 提 供 纠偏信 号 。 光 电式 带材 跑偏 检测器 原 理如 图 2所示 。 光源 发 出的光 线经 过 透镜 1 聚 为平行 光 束 , 向透 镜 2 会 投 ,
系统 的动 态 特 性 。 果 表 明 , 结 系统 满 足带 钢 纠偏 控 制 对 稳 定 性 、 响应 快 速 性 与控 制 精 度 的 要 求 。 的 应 用 证 明 系统 性 它
能可靠, 控制精度 高, 大地提高 r劳动_ 产率 : 极 乍
关 键 词 : 钢跑 偏 ; 带 电液 伺 服 控 制 ; ' A 仿 真 MAI B; L 中 图分 类号 :HI73 3. F 文献 标 识 码 : A 文 章 编 号 :17 — 9 4(0 0)1 0 1- 0 6 2 80 2 1 0 — 0 3 04
39 a . MP 。通 常 , 2 选择 负载 压力为 p= / 。 L23 , p 此时
.
图 3 带材 跑偏 检 测 器测 量 电 路
R
pL
R
2
3 0 0 04 + 5 0 x 。x .5 5 0 x .7 3 0 0 98 O0
宋 云 清
( 新疆伊犁职业技术学院机电工程系 新疆 8 50 3 0 0) 摘要: 为了解决冷轧带钢生产 巾的带材跑偏问题, 本文简述 带材 自动纠偏的电液 伺服系统控制的基本原理, 详细介 绍了系统 数学 模型的建立及利用 MA L B/SM LN TA I U I K进行 系统仿真 的过程 , 并分析 了系统 的稳定性 , 同时分析 了
引 言
随着轧钢 向 自动 化 、连续 化 、高速 化方 向 的发 展, 利用 液乐 伺 服控制 系统 , 张力 、 对 位置 、 度和 速 厚 度 等参 数进 行控 制 已相 当广泛 。 在轧 钢生 产 中, 材 带 跑偏 的主要 原 因有 : 张力 不适应 或 张力太 大 , 系的 辊 不 平行 , 辊子 偏 心或有 锥度 , 材厚度 不均 匀 及横 向 带 弯 曲等 。带钢 跑偏 会增 大带 钢 的切边 量 , 浪费 钢材 ; 带 卷无 法卷齐 , 重影 响带 钢 的卷取 质量 , 小成 品 严 减
; 誊整 》 彝 警 囊 } 譬 鞲R 拳?
∞ 设 ; 、 叠 毫 ~ l | 曩 | \
t | 4 |
一 l 0 0- 鼍 _ ≯ Z 鬟 j 毒 连《
j餐 0 一i _
之,
曼
鼍 |l叠 毫登 誓
敏 电 阻的光通 量 减少 。
图 3为测 量 电路简 图。R1 R 、 2是 同型号 的光敏 电阻 。 作 为测 量元 件装 在带材 下 方 , 2用遮 光罩 Rl R 罩住 , 温度 补偿 作用 。当带 材处 于 正确位 置 (中间 起 位 ) , R1 R 、 3 R 时 由 、 2 R 、 4组 成 的 电 桥平 衡 , 放 大 使 器输 ¨ 电乐 为 0 ; 。当带 材左偏 时 , 遮光 面积减 少 ,
另一 方 面被送 到执 行机 构 ,为纠 偏控 制系 统提供 纠 偏信 号 。
13液 压 系统 的 组 成 .
14控 制 系统 的 工 作 原 理 .
的途 中 , 有部 分光线 受 到被测 带材 的遮 挡 , 使传 到光
收 稿 日期 :0 9 1一 2 2 0 — 1 t
作者简介 : 宋云清( 90 )女, 17 一 , 讲师 , 硕士 , 研究方 向为机 电 一 化 体
耋 釜
1 光 电液 伺 服 控 制 系统 的组 成 及 工作 原 理
11光 电 液 伺 服 控 制 系 统 的 组 成 .
如图 1 所示 , 控制 系统 由光 电传感 器 、 伺服 放 大 器、 电液伺 服 比例 阀 、 服 液 压缸 、 动带 钢 卷 取 的 伺 带
传 动装 置等组 成 。
第 1 ( 第3 期 总 8期 )
21 0 0年 1月
流体锘动/ 副 与 控
F[ ( Po  ̄ T a s s n a d Co to ui we- r n mi n n n r l I
No J S ra 38 e ilNo r
J n2 O a .OI
带钢 卷 取 机 跑偏 电液 伺服 控 制 系统 的仿 真
l
鬈。 ≯}
| 薯
|| \
_ \
图 1控 制 系 统 的 组成 示 意 图
率; 甚至 带钢 边缘 碰撞 折边 、 拉坏 设 备并造 成 断带 停 产 事故 。同时 , 现 自动卷 齐可 使钢 带立 放 , 实 因而使
得 成 品钢卷 整齐 、 包装 运输及 使 用方 便 常 用 的跑 偏控 制 系统有 气 液和光 电液 伺 服控 制 系统 。 者原 理相 同 , 成不 同 。 过后者 具 有信 号 二 组 不 传输 快 、 反馈 方 便 、 电检测 装置 安 装方便 等特 点 光
随后 被 会 聚到 光敏 电 阻上 。在平 行 光 束 到达 透镜 2
图 2带 材 跑 偏 检 测器 工 作 原理
光敏 电阻 R 1阻值减 少 , 电桥 失去平 衡 。差 动放 大器 将这 一 不平衡 电压加 以放大 , 出 电压为 负值 , 输 它反 映 了带材 跑偏 的方 向及 大小 。反 之 , 当带材 右偏 时 , 为正值 。输 出信 号 一 方 面 由显 示器 显示 出来 ,
1 4
l
流体锘动与 控副
擦 因数 f o0 。 - .5
20 第1 0年 期 1
趣
R 3 0
^ ^
() 2伺服 液压缸 有效 面积 的计 算 采用 压力补偿 变量 泵 , 护伺 服阀 , 采用过 为保 应 滤 器 防止油 液 污染 , 据 工作要 求 , 源 压力取 p 根 油