机械设计课程设计 ppt课件
合集下载
机械原理课程设计-铆钉自动冷镦机精品PPT课件
子功能3——转运
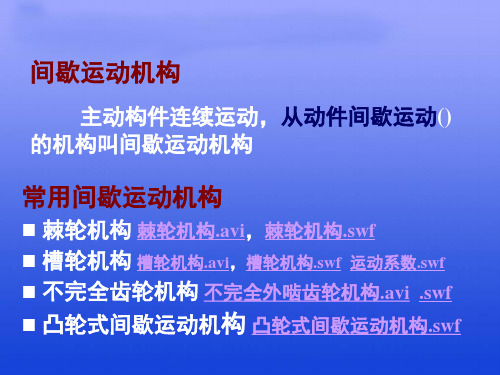
表2 铆钉自动冷鐓机的功能、工艺动作及所需执行机构
功能
自 动 生 产 铆 钉
工艺动作
4冲压往 复运动
3间歇分 度转动
2截料往 复运动
5连续或 间歇往复
运动
1间歇 校直
执行构件 冲头
工作台 (转盘)
刀具顶杆Biblioteka 摩擦轮执行机构偏置曲柄滑块机构
六杆冲压机构
槽轮机构 不完全齿轮 分度凸轮机构 机构
写在最后
经常不断地学习,你就什么都知道。你知道得越多,你就越有力量 Study Constantly, And You Will Know Everything. The More
You Know, The More Powerful You Will Be
结束语
感谢聆听
不足之处请大家批评指导
五、机械传动系统设计计算及执行机构设计说明
传动比的计算与分配 i总=1440 / 60 24
i总=i 带i 标准i 变位 2 3 4
注意:带传动的传动比在2~4范围内选,齿轮传动的传 动比在3~6范围内选。
带传动设计计算——机械设计教材 带传动设计完成后,如传动比不为初选值,应重新
调整齿轮传动比的数值。
机械设计课程组
铆钉自动冷镦机传动系统方案设计
(一)原始数据
制钉速度n=60个/分 铝棒材的直径 6mm 铆钉长度L=20mm 冷镦冲头的行程H=60mm 行程速比系数k=1.2
铆钉自动冷镦机传动系统方案设计
(二)设计任务
按照工艺动作要求进行机构选型、组合 拟定铆钉自动冷镦机机械运动方案简图和运动
循环图 根据原动机和执行机构的运动参数分配传动比 对传动系统的主要执行机构进行运动尺寸综合 图纸要求:机械传动系统运动方案简图1张(A1) 设计说明书1份
机械原理课程设计ppt课件

几点要求
每班同一题目的同学ห้องสมุดไป่ตู้成一个小组 (一般为学号加减7)
每组选出组长一名,负责协调、组织本 组成员的设计(定题后报给老师)
答辩前每组自报每个组员的自评成绩 (由高到低排序,由本组成员讨论、综 合贡献大小而定)
答辩时按组逐一进行 充分发挥团结协作、群策群力的精神
答辩时完成的工作
按照运动特性选型 (6)运动的合成与分解 用顶吸法吸走顶部一张料板 执行系统的运动规律设计
总功能:当加压执行构件(冲头)上下运动时,能锻出较高精度的毛坯 齿轮机构的模数、齿数、中心距等
凸轮连杆组合 工件固定不动,刀具绕被加工孔的中心线转动,进给运动是刀具的径向、纵向运动。
该鞋钉分为钉头、钉杆、钉尖三部分,钉杆成四方锥形 2、构思出完成加压执行机构总体功能的功能-技术矩阵图。
齿轮连杆组合 工件和刀具均不转动,只让刀具作直线运动。
运动位移或速度缩小功能:减小位移量 (或速度),以实现增力要求
按照动作功能分解选型
精锻机主机构设计(3)
2、构思出完成加压执行机构总体功能的 功能-技术矩阵图。
平压模切执行机构 提示 自动送料板装置 实现的原理有: 已按学号分发(共7组题目) 总功能:当加压执行构件(冲头)上下运动时,能锻出较高精度的毛坯 压紧、挤方:由冲头3在前三次送料后的停歇时间内将钉杆挤压成方锥,在其余工作循环中冲头3保持与钉杆接触,起压紧作用。 2 机械系统设计的一般原则 带传动(含同步带)和链传动 将料板从底部推出,然后用夹板抽走 2、机械运动方案设计的过程和内容 运转速度、行程可调性、运动精度等 工件和刀具均不转动,只让刀具作直线运动。 试构思该执行机构的若干方案。 的布置要有利于系统的能量协调和效率的提高 总功能:当加压执行构件(冲头)上下运动时,能锻出较高精度的毛坯 直角坐标式运动循环图 编程、建模分析检验机构 加工内孔机床的运动规律设计: 齿轮机构的模数、齿数、中心距等 工件和刀具均不转动,只让刀具作直线运动。 机构上机分析检验过程;
机械创新设计课程设计--仿人二足步行机器人爬楼梯行走机构设计 ppt课件

*腿部设计:
腿部结构是机器人身体里主要的部分,根据仿 生学的知识,人腿部结构大致为:髋关节,和膝 关节,还有踝关节和脚。本文采用曲柄摇杆机构 实现其直线行走和爬楼梯功能的。两组腿交替的 变换使机身能向前运动,他们每组都支撑机体的 重量,并在负重的状态下使机体的前行,所以适 应的刚性和承载能力是非常重要的,所以对承载 能力有着限制。
课题 :
仿人二足步行机器人爬楼梯行走机构设 计
设计说明书:
*设计任务 *机械系统运动方案设计的构想 *执行系统机构设计 *机器人创新点 *主要参考资料 *设计心得
设计任务
*设计背景:
国外在二足机器人方面研究已经有100多年历史,成果 较多,但大多都结构复杂,造价昂贵,远远超出人们的经济 承受能力。国内的研究相对较晚,虽然也诞生了很多专利, 但由于收到体积、重量、稳定性级安全问题还没有产品真正 投入实,机构之间连接性 好,制作精度容易保证; 2.机器人稳定性好,四杆机构能循环运动容易现实直 线行走; 3.生产成本低,产品绿色环保。
执行系统机构设计:
*双足机器人步行运动过程分析:
双足机器人的步态规划就是规划机器人的行走步态,水平 地面的基本行走步态有前向步行、侧向步行和转向步行。转向 步行包含了前向步行和侧向步行,是最复杂的步行。图中以左 腿首先作为支撑腿,右腿作为摆动腿为例分解,若右腿首先作 为支撑腿,左腿作为摆动腿只需将图中左右调换即可。
*设计目的:
本设计主要是利用机械原理相关知识合理设计机械腿的 相关尺寸及机构来实现爬楼梯的功能。
机械系统运动方案设计的构想:
*具体方案:
双足机器人步行运动过程中,两只脚交替的与地面,发 生间歇性的相互作用,即交替的出现左脚单支撑,双脚支撑 和右脚单支撑的状态,周期性的不断前进。机器人设计过程 中,腿部采用了四杆机构。腿部结构是机器人身体里主要的 部分,根据仿生学的知识,人腿部结构大致为:髋关节,和 膝关节,还有踝关节和脚。本文采用曲柄摇杆机构实现其直 线行走和爬楼梯功能的。两组腿交替的变换使机身能向前运 动,他们每组都支撑机体的重量,并在负重的状态下使机体 的前行。
《机械设计基础》全套PPT课件(完整版)
机械设计基础全套PPT课件(完整版)简介《机械设计基础》是一门介绍机械设计基本理论和方法的课程。
本套PPT课件是全套课程的完整版,旨在帮助学生全面了解机械设计的基础知识和技术,培养学生的机械设计能力。
课件目录1.机械设计基础概述–机械设计概述–机械设计的重要性–机械设计的基本流程2.材料与力学基础–材料工程概述–材料的力学性能–弹性力学基础–塑性力学基础3.物体的几何参数–几何图形的表示方法–构建三维几何模型–几何参数的计算与分析4.连接零件的设计–轴的设计–轴承的选择与设计–轴承的寿命计算5.传动装置的设计–齿轮传动–带传动–传动装置的计算与优化6.结构件的设计–结构件的设计原则–加工工艺与工装设计–结构件的计算与优化7.机械设计的检查与验证–设计的检查原则–设计验证的方法–机械设计的可靠性分析8.机械设计的案例分析–常见机械设计案例分析–机械设计的创新与应用学习建议1.注重课堂笔记的整理,重点记录课程重要概念和公式。
2.完成课后习题和实践任务,巩固所学知识。
3.多查阅相关参考书籍和资料,拓宽机械设计的知识面。
4.参加实验室和工程实习,锻炼机械设计实际操作能力。
5.加强与同学的讨论和交流,共同学习、提高。
结语《机械设计基础》全套PPT课件是学习这门课程的重要辅助资料,帮助学生快速全面掌握机械设计的基础理论和方法。
通过学习本课程,学生能够了解机械设计的基本原理,掌握机械设计的基本流程和方法,并在实际应用中能够独立进行机械设计与分析。
希望本套课件对学生的机械设计学习有所帮助,祝愿大家学习顺利!。