无刷直流电机控制系统的Proteus仿真 (1)
PROTUES课程设计-直流电动机调速器-单片机89C51-Keil---Proteus

1 引言随着微电子技术的不断发展与进步,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器/计数电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。
在现代工业中,直流电动机作为电能转换的传动装置,被广泛应用于机械、冶金、石油、化工、国防等工业部门中。
直流电动机是将直流电能转换为机械能的电动机。
因其良好的调速性能而在电力拖动中得到广泛应用。
随着对生产工艺、产品质量的要求不断提高和产量的增长,越来越多的生产机械要求能实现自动调速。
直流调速系统的发展得力于微电子技术、电力电子技术、传感器技术、永磁材料技术、自动控制技术和微机应用技术的最新发展成就。
正是这些技术的进步使直流调速系统发生翻天覆地的变化。
其中电机的控制部分已经由模拟控制逐渐让位于以单片机为主的微处理器控制,形成数字与模拟的混合控制系统和纯数字控制系统,并向全数字控制方向快速发展。
本文设计了用DAC0808设计直流电动机调速器的基本方案,阐述了该调速器系统的基本结构、工作原理、运行特性及其设计方法。
本系统用电压表测量直流电动机的转速,用MCS-51单片机输出数字信号通过DAC0808芯片实现数模转换,从而输出模拟电压来控制调节直流电动机的转速。
本设计主要研究利用单片机及DAC0808实现数模转换调速,直流电机的控制和测量方法,从而对直流电机的调速控制精度、响应速度以及节约能源等都具有重要意义。
2 设计总体方案2.1 设计要求基本要求:使用AT89C51单片机为核心,使用数模转换元件DAC0808对单片机输出的数字信号进行转换,输出模拟信号驱动直流电动机。
具体要求:在设计中,设计8个按键对应直流电动机的8挡不同转速,按下不同按键时,电动机将以不同速度转动,在8个按键中取一个按键为直流电动机转动停止按键。
8挡不同转速的设定由学生自己决定。
仿真:控制程序在Keil软件中编写,编译,整个控制电路在Proteus仿真软件中连接调示。
直流无刷电机控制系统的建模与仿真
直流无刷电机控制系统的建模与仿真发表时间:2018-08-16T16:29:01.997Z 来源:《电力设备》2018年第13期作者:徐峰赵燕[导读] 摘要:直流无刷电机是一种以电子换相装置取代机械换相装置的新型电机,其既具有直流电动机的调速性能,同时又具有交流电机结构简单、运行可靠、维护方便等优点。
(北京动力机械研究所北京 100074)摘要:直流无刷电机是一种以电子换相装置取代机械换相装置的新型电机,其既具有直流电动机的调速性能,同时又具有交流电机结构简单、运行可靠、维护方便等优点。
可在高空稀薄条件下工作,广泛应用在要求大功率重量比、响应速度快、可靠性高的随动系统中,因此非常有必要对其进一步加强研究。
基于此本文对直流无刷电机控制系统进行了建模和仿真。
关键词:直流无刷电机;控制系统;建模与仿真1、前言随着全控型电力电子器件(如IGBT、IGCT等)的出现和普及,以及微控制器技术的不断进步,交流传动技术迅速普及,各种类型的变频装置被广泛应用于交流传动的场合。
各种交流电力电子变换器的广泛应用,不仅使得各类生产设备的调速驱动、电气传动的性能要求得以满足,而且可以使越来越宝贵的电能得以节省,有效增加社会效益。
2、直流无刷电机的基本原理直流无刷电机因其具有高效率、高功率密度、易于维护等优点在近年来得到了越来越广泛的应用,而将直流无刷电机与矩阵式变换器结合组成的电力传动装置则具有两者的优点。
直流无刷电机与传统的电机在工作原理和结构构造方面均存在着差异,因此需要分析直流无刷电机的结构组成和工作原理。
本文讨论的直流无刷电机的转子为永磁材料制成的,可称为永磁直流无刷电机。
永磁直流无刷电机按驱动电流方式可分为方波驱动和正弦波驱动,按照控制方式可分为有位置传感器控制和无位置传感器控制。
本文探讨的是永磁方波型直流无刷电动机,并采用有位置传感器的方式进行控制。
永磁方波型直流无刷电机的组成可分为电机本体、转子位置传感器以及控制电机各相分别导通的功率电子开关线路。
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
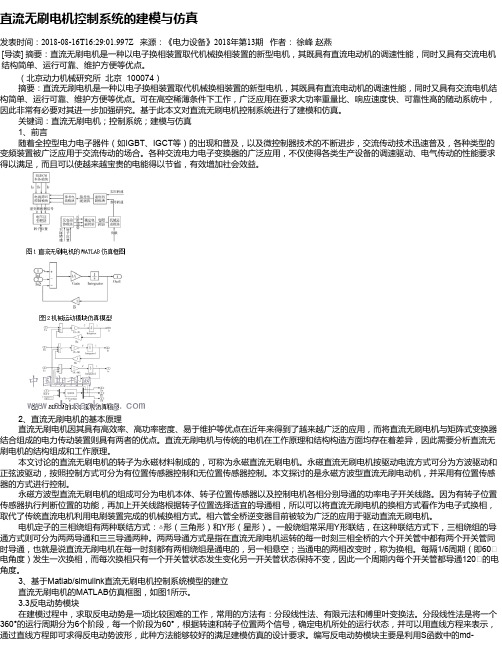
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
第5章 无刷直流电动机控制系统.

第 5 篇
无刷直流电动机控制系统
内容提要
无刷直流电动机的组成结构和工作 原理 无刷直流电动机的基本公式和数学 模型 无刷直流电动机的转矩的波动 无刷直流电动机的驱动控制 无位置传感器的无刷直流电动机的 驱动控制 无刷直流电动机驱动控制的专用芯 片介绍
第一节 无刷直流电动机的组成结构和工作原理
图5-4表明,无刷直流电动机转子位置传感 器输出信号HA、HB、HC在每360度电角度内按 顺序给出六个代码,101、100、110、010、 011、001。顺序与正反转有关。 图5-5是无刷直流电动机的电子换向器主回 路,有六只功率开关元件组成的三相H形桥式逆 变电路。 图5-6是无刷直流电动机的定子绕组结构示 意图。
速度电流双闭环的无刷直流电动机驱动器
一、开环型无刷直流电动机驱动器
开环型三相无刷直流电动机驱动器内部包含 有电子换向器主电路(三相H形桥式逆变器)、 换向控制逻辑电路、PWM调速电路以及过流保护 电路。电路结构5-10。 (1)换向逻辑电路(参见图5-4),位置传感 器输出信号HA、HB、HC在360度电角度内给出六个 代码,换向控制逻辑电路接收后,进行译码处理, 给电子换向器主回路中的六个开关管驱动控制信 号。
由于换相控制逻辑电路输出的换相信号频率 与电动机的转速有关,与磁极数也有关,无论在 何种情况下,换相控制信号的频率都远远低于 PWM信号的频率,因此,可以把PWM信号和换相控 制信号通过逻辑“与”的办法合成在一起,通过 调节PWM信号的占空比来调速。 图5-12中表明了PWM信号与换相控制信号的 合成和有关的波形。
(3)电枢反应的影响 电枢反应使得气隙磁场发生畸变,相对静止 的电枢与连续转动的转子产生电磁转矩发生变化。 (4)相电流换向引起的转矩脉动 换相状态的变化与电动机自身的相反电动势 有关,影响转矩脉动。 (5)由于机械加工引起的转矩波动
无刷直流电动机控制系统课件

针对电机在实验中表现出的稳 定性不足的问题,可以增强系 统的稳定性以提高其运行可靠 性。例如,增加保护电路或改 进散热设计等。
06 无刷直流电动机控制系统 的发展趋势与展望
技术创新与进步
数字化控制
采用先进的数字信号处理器和控制器,实现无刷直流电动机的高 性能控制,提高系统精度和稳定性。
智能传感技术
航空航天
无刷直流电动机控制系统在航空航 天领域中也得到了广泛的应用,如 无人机、直升机、卫星等。
汽车电子
无刷直流电动机控制系统在汽车电 子领域中也有广泛的应用,如汽车 空调、电动车窗、电动座椅等。
02 无刷直流电动机控制系统 的工作原理
无刷直流电动机的工作原理
结构特点
无刷直流电动机主要由电机本体、位置传感器和电子换向器 组成。电机本体具有多个线圈,电子换向器通过晶体管控制 电流的流向,实现电机的旋转。
通信协议调试
对通信协议进行调试,确保通信的稳定性和可靠性。
调试与优化
系统调试
对整个无刷直流电动机控制系统进行调试,包括 硬件电路、软件程序和通信等。
性能测试
对控制系统的性能进行测试,包括响应时间、稳 态误差等指标。
优化建议
根据调试和性能测试的结果,提出优化建议,进 一步提高控制系统的性能。
05 无刷直流电动机控制系统 的性能测试与评估
应用磁编码器、光电编码器等传感器,实现对无刷直流电动机的精 确速度和位置控制。
容错控制技术
引入多种传感器和算法,提高系统的容错能力,确保无刷直流电动 机在故障情况下的安全运行。
应用领域拓展
工业自动化
随着工业自动化水平的提高,无刷直流电动机控制系统在 机器人、数控机床等领域的应用不断扩大。
无刷直流电机的模糊控制系统仿真

摘要无刷直流电动机是电力电子技术、微电子技术和永磁材料技术相结合的一种新型电动机。
无刷直流电动机具有体积小、运行可靠、控制相对简单等特点。
目前,无刷直流电机正在快速发展。
尤其是在家用电器、精密仪器、电梯控制等领域,无刷直流电动机都获得了很多成功应用。
本文详细的介绍了无刷直流电机的组成、基本原理和数学模型。
介绍了简单模糊控制器的设计过程。
通过分析MATLAB中“ac7_example”模型,利用Simulink 工具箱搭建模糊控制器,采用模糊控制法对无刷直流电机进行调速。
实现了无刷直流电机的模糊控制系统的计算机仿真。
结果表明,该模糊控制器结构简单、易于实现,能够基本满足系统的性能要求。
关键词:无刷直流电机;模糊控制;Matlab;SimulinkABSTRACTBrushless DC motor is the electric power and electronic technology, microelectronic technology and permanent magnet material technology is combined with a novel motor. Brushless DC motor has the advantages of small volume, reliable operation, control of relatively simple features such as. At present, brushless DC motor are rapid development. Especially in household appliances, precision instruments, elevator control and other fields, brushless DC motors have gained a lot of successful application.This paper introduces the brushless DC motor of the composition, basic principle and mathematical model. Introduction of simple fuzzy controller design process. Through the analysis of the MATLAB "ac7_example" model, the use of Simulink toolbox to build the fuzzy controller, the fuzzy control method of Brushless DC motor speed control. Realization of Brushless DC motor fuzzy control system computer simulation. The results show that, the fuzzy controller has the advantages of simple structure, easy to implement, can basically meet the system performance requirements.Key words:Brushless DC motor;fuzzy control;Matlab;Simulink目录第一章绪论 (1)一、课题背景 (1)二、无刷直流电机的发展历程 (1)三、无刷直流电机的结构特点 (2)四、无刷直流电机的应用 (2)五、主要研究内容 (3)第二章无刷直流电机的基本原理 (4)第一节无刷直流电机的基本组成 (4)第二节无刷直流电机的工作原理 (6)第三节无刷直流电机的数学模型 (7)第三章模糊控制仿真设计 (10)第一节模糊控制 (10)第二节Matlab简介 (12)第三节Simulink组件介绍 (12)第四节典型模糊控制设计 (13)第五节无刷直流电机系统的稳定性分析 (17)第四章无刷直流电机的糊控制仿真 (19)第一节无刷直流电机调速系统模型 (19)第二节无刷直流电机的模糊控制设计 (22)结论 (28)参考文献 (29)致谢 (30)第一章绪论一、课题背景无刷直流电机是一种把控制装置和电机本体结合在一起的机电一体化设备,它具有高效率,高功率,高可靠性等优点。
无刷直流电机的模糊控制系统仿真
摘要无刷直流电动机是电力电子技术、微电子技术和永磁材料技术相结合的一种新型电动机。
无刷直流电动机具有体积小、运行可靠、控制相对简单等特点。
目前,无刷直流电机正在快速发展。
尤其是在家用电器、精密仪器、电梯控制等领域,无刷直流电动机都获得了很多成功应用。
本文详细的介绍了无刷直流电机的组成、基本原理和数学模型。
介绍了简单模糊控制器的设计过程。
通过分析MATLAB中“ac7_example”模型,利用Simulink 工具箱搭建模糊控制器,采用模糊控制法对无刷直流电机进行调速。
实现了无刷直流电机的模糊控制系统的计算机仿真。
结果表明,该模糊控制器结构简单、易于实现,能够基本满足系统的性能要求。
关键词:无刷直流电机;模糊控制;Matlab;SimulinkABSTRACTBrushless DC motor is the electric power and electronic technology, microelectronic technology and permanent magnet material technology is combined with a novel motor. Brushless DC motor has the advantages of small volume, reliable operation, control of relatively simple features such as. At present, brushless DC motor are rapid development. Especially in household appliances, precision instruments, elevator control and other fields, brushless DC motors have gained a lot of successful application.This paper introduces the brushless DC motor of the composition, basic principle and mathematical model. Introduction of simple fuzzy controller design process. Through the analysis of the MATLAB "ac7_example" model, the use of Simulink toolbox to build the fuzzy controller, the fuzzy control method of Brushless DC motor speed control. Realization of Brushless DC motor fuzzy control system computer simulation. The results show that, the fuzzy controller has the advantages of simple structure, easy to implement, can basically meet the system performance requirements.Key words:Brushless DC motor;fuzzy control;Matlab;Simulink目录第一章绪论 (1)一、课题背景 (1)二、无刷直流电机的发展历程 (1)三、无刷直流电机的结构特点 (2)四、无刷直流电机的应用 (2)五、主要研究内容 (3)第二章无刷直流电机的基本原理 (4)第一节无刷直流电机的基本组成 (4)第二节无刷直流电机的工作原理 (6)第三节无刷直流电机的数学模型 (7)第三章模糊控制仿真设计 (10)第一节模糊控制 (10)第二节Matlab简介 (12)第三节Simulink组件介绍 (12)第四节典型模糊控制设计 (13)第五节无刷直流电机系统的稳定性分析 (17)第四章无刷直流电机的糊控制仿真 (19)第一节无刷直流电机调速系统模型 (19)第二节无刷直流电机的模糊控制设计 (22)结论 (28)参考文献 (29)致谢 (30)第一章绪论一、课题背景无刷直流电机是一种把控制装置和电机本体结合在一起的机电一体化设备,它具有高效率,高功率,高可靠性等优点。
第7章无刷直流电动机控制系统
位置传感器是无刷直流电动机系统的组成部分 之一,也是区别于有刷直流电动机的主要标志。 其作用是检测主转子在运动过程中的位置,将 转子磁钢磁极的位置信号转换成电信号,为逻 辑开关电路提供正确的换相信息,以控制它们 的导通与截止,使电动机电枢绕组中的电流随 着转子位置的变化按次序换向,形成气隙中步 进式的旋转磁场,驱动永磁转子连续不断地旋 转。
霍尔位置传感器必须满足以下两个条件: ① 位置传感器在一个电周期内所产生的开关 状态是不重复的,每一个开关状态所占的电角 度应相等。 ② 位置传感器在一个电周期内所产生的开关 状态数应和电动机的工作状态数相对应。
位置传感器输出的开关状态通过一定的逻辑变 换与电动机的换向状态对应,从而完成换向。 对于三相无刷直流电动机,其位置传感器的霍 尔元件的数量是3,安装位置应当间隔120º 电 角度, 其输出信号是Hu、Hv、Hw,波形如 图7.1.4所示。
3. 直流无刷电动机的换向原理 图7.1.4表明,无刷直流电动机转子位置传感器输 出信号Hu、Hv、Hw在每3600电角度内给出6 个按顺序排列的代码:101、100、110、010、 011、001。 该顺序与电动机的转动方向有关,如果转向反 了,代码顺序也将倒过来。
无刷直流电动机的电子换向器主回路如图7.1.5 所示,三相H形桥式逆变电路由6只功率开关元 件组成。
稀土永磁方波型电动机属于永磁无刷直流电动 机的范畴,而稀土永磁正弦波型电动机则一般 作为三相交流永磁同步伺服电动机来使用。但 这不是绝对的,究竟是三相永磁无刷直流电动 机(无刷直流电动机)还是三相交流永磁同步伺 服电动机主要取决于电动机控制系统的控制方 式,取决于电动机的转子位置传感器的类型。
2. 无刷直流电动机的转子位置传感器 转子的位置检测器有多种,正弦波永磁同步电动 机一般采用旋转变压器、绝对式光电脉冲编码器 或增量式光电脉冲编码器作为位置检测元件,而 在永磁无刷直流电动机(方波电动机)中,一般 采用简易型的位置检测器,该器件不能用来检测 转子的精确位置,主要作用是为了满足电动机换 相的要求。
基于Protues的步进电机控制系统仿真设计
基于Protues的步进电机控制系统仿真设计.计算机控制技术课程设计报告《基于Protues的步进电机控制系统仿真设计》姓名:学号:专业: 自动化(1)班授课老师: 老师日期: 2013/6/20目录引言 ...................................................... 1 1设计电源 ................................................ 1 2.四项步进电机 (1)2.1步进电机 ................................................. 1 ..2.2步进电机的控制 (1)2.3步进电机的工作过程 ....................................... 1 3电路图设计 . (2)3.1AT89c52的概述 (2)3.2最小系统 (2)3.3复位电路 (2)3.4控制电路 (3)3.5电机驱动电路 ............................................. 3 4程序设计 (3)4.1 主程序框图 (3)4.2 步进电机速度控制程序框图 (4)4.3 控制开关输入程序框图 ................................... 5 5结束语 .................................................. 6 [参考文献] ................................................ 7 附录A 源程序 ............................................. 8 附录B ................................................... 10 ..引言通过控制AT89c52芯片,实现对四相步进电机的转动控制。
无刷直流电机调速系统的建模与仿真分析
无刷直流电机调速系统的建模与仿真分析摘要:本文基于电机运行方程建立无刷直流电机的仿真模型,对无刷直流电机的转速环、电流环双环控制策略进行仿真,通过仿真结果验证无刷直流电机仿真模型的有效性以及控制策略的有效性。
主题词:无刷直流电机;建模;仿真;控制。
1 无刷直流电机控制系统的组成本文所建立的无刷直流电机控制系统由无刷直流电机、三相电压型逆变器、检测电路、控制电路组成,采用速度环和电流环双环控制,如图1所示。
速度环利用与电机同轴的霍尔传感器检测电机的转速,与参考转速进行比较,速度环的输出作为电流环三相参考电流的幅值,结合电机转子的位置信息得到电流环的参考电流,,。
电流检测电路测量无刷直流电机的三相定子电流、、,与三相参考电流进行滞环比较,电流环的输出经过控制电路转化为逆变器开关管IGBT的的控制信号,控制逆变器输出无刷直流电机需要的定子电流。
图1 无刷直流电机控制系统的组成框图3 无刷直流电机控制系统的数学模型3.1电机数学模型无刷直流电机定子绕组为三相Y型接法,两两导通方式,驱动电路采用三相全桥逆变电路。
为了方便分析BLDCM的数学模型及电磁转矩等特性,作如下假设[2]:(1)三相绕组完全对称,气隙磁场分布为梯形波,平顶宽为120°电角度;(2)忽略齿槽、换相过程和电枢反应的影响;(3)磁路不饱和,不计涡流和磁滞损耗;(4)电枢绕组在定子内表面均匀连续分布。
3.1.1 电压平衡方程BLDCM的电压平衡方程如公式1所示。
(1)式中,、、——定子各相电压,单位:V;——定子电阻,单位:;、、——定子各相电流,单位:A;,——定子电感,互感,单位:H;、、——各相反电势,单位:V。
3.1.2 转矩方程和机械运动方程BLDCM的转矩方程如公式2所示,机械运动方程如公式3所示。
(2) (3)式中,——电磁转矩,单位;——电机转子减速度,单位rad/s;——负载转矩;单位为;——转动惯量,单位为;——阻尼系数,单位为。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷直流电机控制系统的Proteus仿真-机械制造论文
无刷直流电机控制系统的Proteus仿真
王家豪潘玉民
(华北科技学院电子信息工程学院,河北三河101601)
【摘要】基于Proteus软件仿真平台,提出了一种对无刷直流电机(BLDCM)控制系统实现了转速闭环控制的方案。
该系统以AT89S52单片机为核心,采用IR2101芯片驱动及AD1674实现速度,并利用数码动态显示转速,通过增量式PID调节对无刷直流电机实现转速闭环稳定控制。
仿真结果表明该系统具有可控调速、显示直观等特点。
关键词无刷直流电机(BLDCM);Proteus;增量式PID;闭环控制
0引言
无刷直流电机(BLDCM)既有直流有刷电机的特性,又有交流电机无刷的优点,在快速性、可控性、可靠性、输出转矩、结构、耐受环境和经济性等方面具有明显的优势,近年来得到迅速推广[1]。
BLDCM是一种用电子换向取代机械换向的新一代电动机,与传统的直流电动机相比,它具有过载能力强,低电压特性好,启动电流小等优点。
近年来在工业运用方面大有取代传统直流电动机的趋势,所以研究无刷直流电机的驱动控制技术具有重要的实际应用价值。
本设计采用增量式PID控制策略控制无刷电动机,并在Proteus平台上进行转速闭环系统仿真。
搭建了无刷直流电动机转速控制系统的仿真模型,基于80C51控制核心,采用keil C51软件编写C程序。
1系统硬件组成
控制系统的硬件组成如图1所示。
采用Atmel公司的AT89S52单片机为系统
控制核心、IR2101驱动的MOSFET三相桥式逆变器、无刷直流电机、A/D转换转速检测、闭环PID控制、按键检测、档位和转速显示等部分组成。
2控制系统核心及外围电路
系统核心AT89S52单片机最小系统及按键电路如图2所示。
AT89S52芯片是8位单片机,具有廉价、实用及运算快等优点,它有两个定时器,两个外部中断接口,24个I/O口,一个串行口。
单片机首先进行初始化,将显示部分(转速显示、档位显示)送显“0”然后通过中断对按键进行检测当检测到启动键按下时,系统启动,控制核心输出初始控制码,与此同时通过AD转换器读取当前的实时转速,一方面用于显示,另一方面将当前转速与设定转速送入PID控制环节然后输出下一时刻的控制码。
在本次设计中使用80C51的外部中断接口0(INT0)作按键检测(见图3),通过四个与门,当有任何一个按键按下去时tap端都会出现低电平引发中断。
P0口用作数据输出,P2口用作地址输出(P2.0—P2.1档位显示,P2.2pwm输出地址,P2.3转速检测地址,P2.4—P2.8转速输出显示地址)。
由于所需按键比较少,所以采用独立按键,使用点动开关分别实现启动(OPEN)、加速(UP)减速(DOWN)、反转(CPL)、停止(CLOSE)。
3无刷电机、逆变器及驱动模型
Proteus软件中无刷电机模型如图4所示。
它是建立在直流电机模型基础上,可以根据应用需要设定额定电压、空载转速、负载阻抗、转动惯量、绕组阻抗、绕组间互感等参数。
模型的左侧是ABC三相电压输入,右侧为三个霍尔(HALL)传感器,用于实时监测转子的位置。
在Proteus的元件库中,直流无刷电机有两种,bldcm-star与bldcm-triangle,即三相星型联接和三相角型联接。
两者仅区别于绕组的连接方式。
本文采用星型连接的无刷电机。
该模型共有8个引脚:左侧A、B、C为三相电压输入端,最大输入电压为12V;右侧:sa、sb、sc是三个HALL传感器的输出端。
下端:load为模拟负载输入端,omega为转子的角速度输出端,电压型输出,其输出电压乘以60即为实际转速。
三相全桥电路为二二导通六状态导通方式,使用了6个N沟道功率MOSFET 管,型号为SMP60N06,构成三相桥式逆变器。
4闭环控制系统实验
首先进行电机开环控制,再引入PID控制策略实现转速闭环调节。
同时在系统中加入了按键检测以及转速显示,最后实现了对电动机的加速、减速、正反转等控制功能,以及在消除速度误差及稳速方面进行各种实验。
为实际系统的设计制作提供了基础。
4.1转速检测电路
转速检测电路采用逐次比较型12位A/D转换器AD1674,采用双极性输入方式,由于输入电压范围为+10V~-10V所以在无刷电机的omega输出端接滑动变阻器分压。
双极性输入时,输出的转换结果D与模拟输入电压VIN之间的关系为:
式中VFS为满量程电压。
4.2转速显示部分及档位显示部分
显示部分均采用7段共阴极二极管配合74LS373的led静态显示,由于对无刷电动机需要严格的时间控制,虽然动态显示的硬件连接简单而且功耗低,但是由于其需要一定的延时消除“残影”故不采用。
5软件设计
在本系统的设计中,采用80C51的定时器0定时产生驱动电路所需的控制脉冲,P1口的P1.0~P1.4分别接受OPEN、UP、DOWN、CPL、CLOSE五个按键信号;P1.5~P1.7用于接受无刷电动机的霍尔传感器的信号;外部中断0用于检测是否有按键按下;P2口用作地址输出口,其中,P2.0~P2.1档位显示,P2.2pwm输出地址,P2.3转速检测地址,P2.4~P2.8转速输出显示地址。
软件共分七部分:主函数(main.c)、显示函数(led.c,led.h)、按键检测函数(botton.c)、PWM波发生函数(pwm.c)、电动机控制逻辑(controlfucntion.c,controlfunction.h)、AD转换部分(feedback.h,feedback.c)。
系统上电后首先进行初始化(档位送显“00”,转速送显“0000”,)由于使用80C51的timer0为发送控制码的延时脉冲,所以还要对80C51的定时器设定初始值和开定时器中断。
INT0作按键检测,需开外部中断0的中断允许。
然
后系统进入等待状态,等待OPEN被按下。
当OPEN被按下,档位记录r=1同时档位送显“01”,然后将timer0的定时器启动位(TR0)置1即启动定时器,开始发送控制脉冲。
同时启动AD转换读入实际转速,将实际转速和档位1的目标转速同时传送给PID函数得到下一时刻的延时控制。
PID的整定选用Ziegler-Nichols整定法。
6Proteus仿真结果及分析
仿真时,设定目标转速为530r/min。
仿真运行结果如图,图6为霍尔传感器输出信号,其中Channel A,Channel B,Channel C对应BLDC-STAR的sa,sb,sc输出信号,Channel D为BLDC-STAR A项电压输出。
7结语
本文利用Proteus仿真软件设计了无刷直流电机仿真控制系统,完成了主控制器硬件电路、功率驱动电路、功率逆变电路、电流检测电路、转速检测电路的设计,通过C语言编程在控制器实现了转速电流双闭环增量PID控制,实现了对设定转速的恒速控制。
实验结果表明,所设计的系统能够满足无刷直流电机转速控制的设计要求,取得了良好的效果,对实际硬件电路的设计具有很大的辅助
作用。
参考文献
[1]蒋辉平.基于Proteus的单片机系统设计与仿真实例[M].机械工业出版社,2012,7.
[2]陈伯时.电力拖动自动控制系统—运动控制系统[M].机械工业出版社.2008,3.
[3]姜志海.单片机的C语言程序设计与应用[M].电子工业出版社.2011,7. [4]赵希梅.直流无刷电动机原理与技术应用[M].2012.
[5]刘刚.永磁无刷直流电机控制技术与应用[M].2012.
[6]彭伟.单片机C语言程序设计实训100例:基于PIC+Proteus仿真[M].2012.
[7]王晓明.电动机的DSC控制:微芯公司dsPIC应用[M].2012.
[8]李晓斌,张辉,刘建平,利用DSP实现无刷直流电机的位置控制[J].机电工程,2005(03).
[9]刘宏.基于DSP的直流无刷电机电子调速器系统设计[J].黑龙江科技信息,2009(16).
[10]叶晓霞,徐烟红,郝浩.无刷直流电机的双闭环控制仿真[J].科技创业月刊,2010(12).
[责任编辑:邓丽丽]。